長征五號運載火箭在線調姿規劃方法
2021-06-19 08:46:30李學鋒
導彈與航天運載技術 2021年3期
張 宇,黃 聰,李學鋒,王 輝,劉 暢
(北京航天自動控制研究所,北京,100854)
0 引 言
長征五號運載火箭發射任務在星箭分離前有姿態調整要求,二級二次主動段結束后為末修調姿段,調姿段火箭將姿態旋轉到衛星需要的姿態,以使衛星分離后太陽帆板展開即可朝向太陽,同時天線指向滿足與地面通信的要求。傳統火箭采用攝動制導方式,調姿段初始程序角和終端程序角均為彈道程序角,在發射前已經確定,飛行時采用轉動固定角度完成調姿功能[1]。長征五號火箭二級二次主動段采用迭代制導控制方式,調姿起始時的程序角是不固定的,轉動固定角度的調姿方案已無法滿足要求,因此需要改用在線規劃的調姿方案[2]。
為解決初始程序角未知、終端程序角已知情況下的火箭調姿問題,本文提出2種程序角在線規劃方法:a)三通道程序角在線調姿規劃。采用歐拉角描述姿態,分別對俯仰、偏航、滾動通道程序角進行在線實時規劃。b)程序四元數在線調姿規劃。采用四元數描述姿態,對程序四元數進行在線調姿規劃,之后計算偏差四元數,并將其分解到箭體系進行控制。
1 三通道程序角在線調姿規劃
使用歐拉角描述火箭姿態,三通道的初始姿態角為俯仰角0φ、偏航角0ψ、滾動角0γ,終端程序角為俯仰程序角φcx_end、偏航程序角ψcx_end、滾動程序角γcx_end,調姿起始時間0T,調姿結束時間1T。調姿過程中t時刻的程序角按照式(1)進行在線實時規劃:
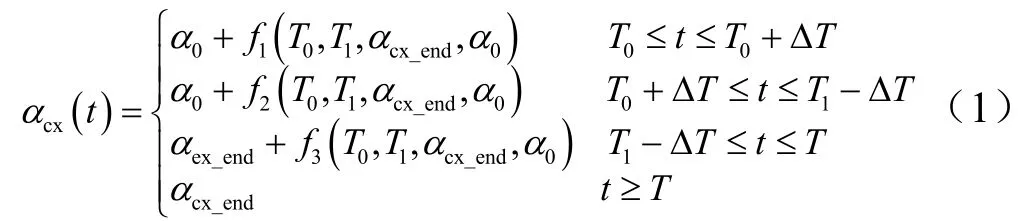
式中α為程序角,α=φ,ψ,γ,其中,φ,ψ,γ分別為俯仰角、偏航角、滾動角;ΔT為調姿時間參數,本文令
3個通道的程序角均按照式(1)計算,能夠得到實時規劃出的t時刻俯仰程序角φcx(t)、偏航程序角ψcx(t)和滾動程序角γcx(t)。在線規劃程序角示意如圖1所示,可以看出用此方法規劃出的程序角較為平滑,有助于減小調姿過程中的姿態角超調,實現火箭平穩調姿。
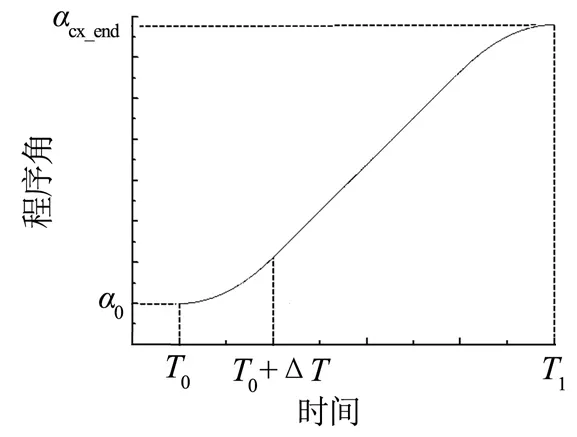
圖1 在線規劃程序角示意Fig.1 On-line Planning Program Angle Diagram
2 程序四元數在線調姿規劃
首先將姿態角和程序角從三通道歐拉角描述方式轉換為四元數姿態描述方式,之后計算出初始姿態和目標姿態之間的夾角β,按照梯形調姿公式進行實時在線規劃,解算出程序四元數,再根據姿態四元數和程序角四元數計算出偏差四元數,并分解到箭體系進行控制。
已知三通道的初始姿態角0α(0φ,0ψ,0γ)、目標程序角、調姿起始時間T0、調姿結束時間T1[3]。
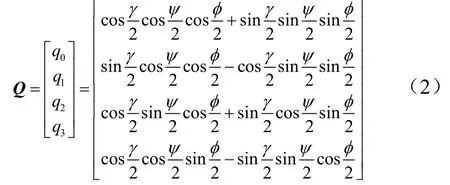
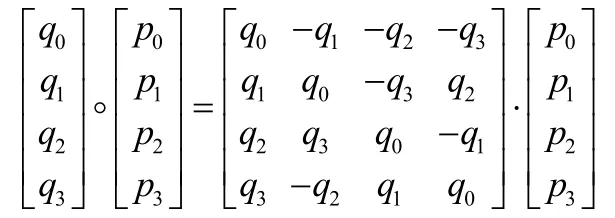
a)將φ0、ψ0、γ0和φcx_end、ψcx_end、γcx_end按式(2)轉換為程序四元數 0Q和1Q。
計算四元數P:

b)對四元數P進行判斷,根據當前姿態與目標姿態的差距進行不同處理,具體操作為將轉角分為A、B、C 3個區域。
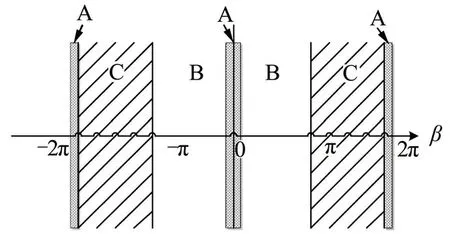
圖2 轉角β分布示意Fig.2 Angle β Distribution Diagram
A區域:調姿前姿態四元數與目標程序四元數接近,無需進行規劃,即:

B區域:調姿前姿態四元數與目標程序四元數相差半圈以內,直接進行程序四元數規劃,令:

C區域:調姿前姿態四元數與目標程序四元數相差超過半圈,處理為從對側小圈方向規劃,以使規劃出的轉角β不大于180°。即:
若β>π,按式(3)計算后,還需進行如下處理:

c)對程序四元數進行實時規劃,仍然采用角速度為梯形的規劃公式進行調姿規劃。
令:α0=0,α1=β,帶入式(1)計算得到β(t)。
d)利用式(4)計算P(t)。

e)利用式(5)計算t時刻的程序四元數。

f)利用式(6)計算t時刻的偏差四元數:

式中Q(t)為t時刻的姿態四元數。
將偏差四元數 ΔQ(t)分解到箭體系三通道即可用于控制指令計算。
基于偏差四元數進行姿態控制規律計算,不會出現姿態角穿越問題,也不會出現 “轉多圈” “轉大圈”問題,該控制方式可有效解決大姿態控制問題,提高了姿態控制設計任務適應性[5]。
3 數學仿真
3.1 調姿段動力學模型
調姿段三通道繞心運動方程[6]:
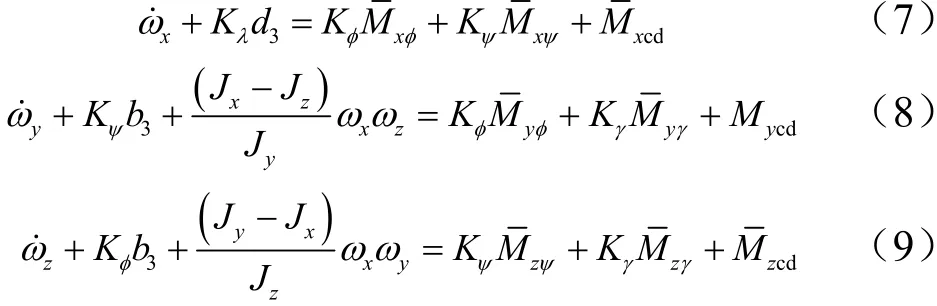
式中ω為箭體繞心角速度;J為轉動慣量;K為姿控噴管開關狀態字;為干擾力矩系數;b3,d3為控制力矩系數。
假設調姿起始姿態俯仰角、偏航角、滾動角為(-113°, 0°, 0°),調姿終端姿態為(-30°, -10°,-90°),設定總調姿時間為T1-T0=60 s,參數ΔT=15 s。
3.2 三通道程序角在線調姿規劃仿真結果
采用三通道程序角在線調姿規劃方法進行數學仿真,數學仿真結果典型曲線見圖3、圖4。
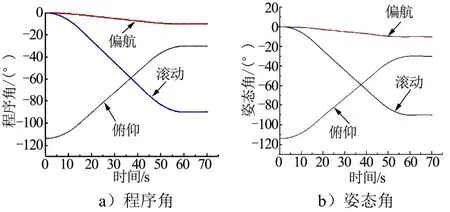
圖3 三通道程序角和姿態角Fig.3 Three Channel Program Angle and Attitude Angle
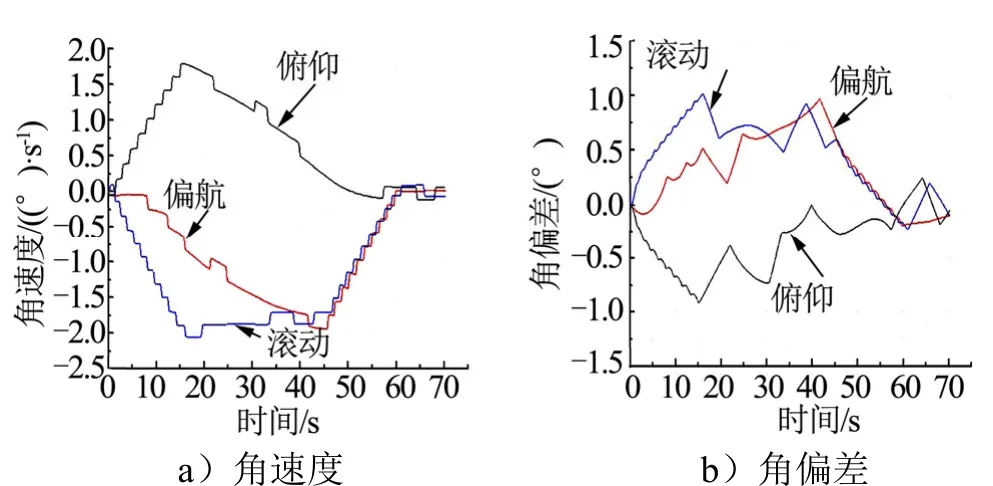
圖4 三通道角速度和角偏差Fig.4 Three Channel Angular Velocity and Angular Deviation
三通道程序角調姿規劃仿真中的姿控噴管開啟次數和燃料消耗見表1。
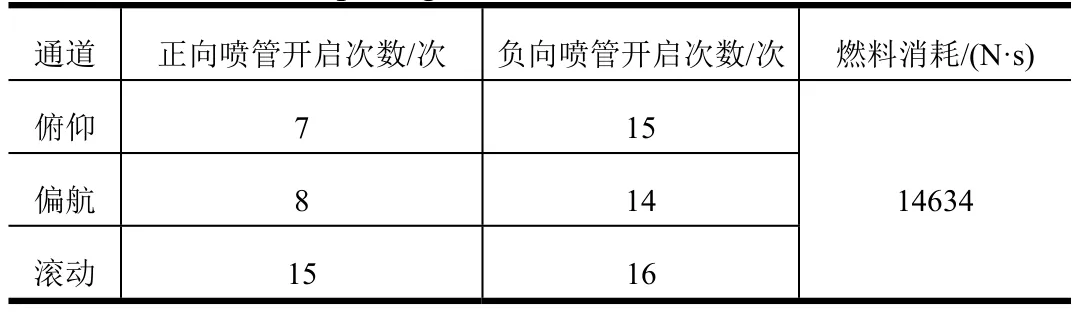
表1 姿控噴管開啟次數Tab.1 Opening Times of Attitude Control Nozzles
從仿真結果可以看出,“三通道程序角在線調姿規劃”能夠規劃出平滑的程序角,火箭姿態跟蹤程序角良好,調姿結束后角偏差較小,精度較好。
使用歐拉角進行姿態描述時,按照φ、ψ、γ的轉序,偏航角的值域為(-90°, 90°),在接近90°附近會出現計算奇異,因此,需要對90°附近的計算進行保護處理[7]。
3.3 程序四元數在線調姿規劃仿真結果
使用四元數描述姿態時,沒有偏航角小于90°的限制,也不會出現計算奇異。采用程序四元數在線調姿規劃方法,數學仿真結果典型曲線如圖5、圖6所示。
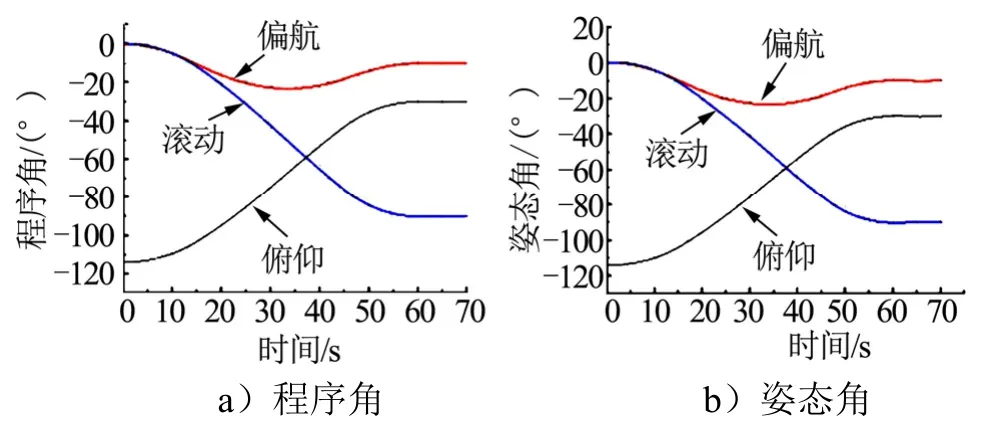
圖5 三通道程序角和姿態角Fig.5 Three Channel Program Angle and Attitude Angle
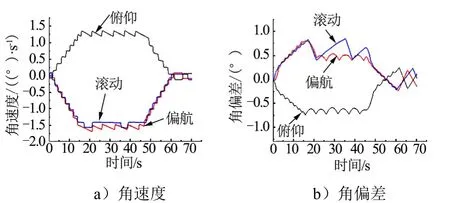
圖6 三通道角速度和角偏差Fig.6 Three Channel Angular Velocity and Angular Deviation
程序四元數調姿規劃仿真中的姿控噴管開啟次數和燃料消耗見表2。

表2 姿控噴管開啟次數Tab.2 Opening Times of Attitude Control Nozzles
可以看出,使用“程序四元數在線調姿規劃”也能夠規劃出平滑的程序角,與“三通道程序角在線調姿規劃”的程序角略有差別,調姿結束后角偏差均能達到小于0.5°。程序四元數調姿規劃仿真的姿控噴管開啟總次數和燃料消耗量略大于三通道程序角調姿規劃仿真。這兩種方法均能完成調姿程序角規劃功能。
由于這2種方法是根據火箭實際飛行姿態進行程序角規劃,因此對二級二次飛行段結束時的一些特定故障有一定的適應能力。例如,某些故障導致二級二次飛行段耗盡關機、關機時姿態角偏差偏大,轉入調姿段后在線調姿規劃算法將規劃出一條從當前實際飛行姿態轉到目標姿態的程序角,比按固定程序角調姿的適應性更強[8]。
4 結 論
本文針對新一代大型運載火箭長征五號調姿段初始程序角未知、終端程序角已知的特點,提出了2種在線調姿規劃方法。這2種方法均能實現初始程序角不固定、終端程序角固定的在線程序角規劃,規劃出平滑的程序角,完成調姿功能。其中四元數調姿方案能夠自動實現最短路徑調姿,能夠避免“轉多圈” “轉大圈”的問題,對調姿段初始的姿態偏差故障有一定的適應能力,向智慧火箭邁進了一步。方案已通過長征五號火箭飛行驗證。
猜你喜歡
公民與法治(2020年11期)2020-07-25 02:02:06
人大建設(2019年12期)2019-05-21 02:55:44
中山大學法律評論(2018年1期)2018-03-30 01:21:00
領導決策信息(2018年50期)2018-02-22 06:17:16
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
商周刊(2017年5期)2017-08-22 03:35:26
環球時報(2017-03-30)2017-03-30 06:44:45
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
中國工程咨詢(2016年4期)2016-02-14 07:28:28