復雜三維走向三鉸鏈管路補償工況下的補償器角位移研究
2021-06-19 08:45:58吳立夫吳云峰丁建春
導彈與航天運載技術 2021年3期
吳立夫,吳云峰,張 萌,劉 艷,丁建春
(1. 北京宇航系統工程研究所,北京,100076;2. 深低溫技術研究北京市重點實驗室,北京,100076)
0 引 言
作為貯箱增壓和推進劑運送的通道,液體運載火箭管路系統除滿足基本的輸送功能外,還需要適應箱體、殼段以及發動機系統的制造誤差和工作變形,對不同的邊界位移進行補償。目前管路系統的補償可通過自補償和補償器補償兩種方法實現[1]。自補償方法利用管路自身的彈性變形實現補償,而補償器補償方法則需要借助膨脹節或補償管等結構進行補償[2]。新一代運載火箭采用液氫、液氧或者液氧、煤油作為工質。隨著火箭貯箱直徑的增加、工質溫度的降低,加注、增壓等工況下貯箱變形量顯著增加,因而對管路系統提出了更高的補償需求。為滿足大補償量的管路設計要求,新一代運載火箭管路系統通常采用三鉸鏈管路作為補償導管。研究表明,采用三鉸鏈式管路補償方案時,管路結構能夠很好地適應較大軸向和橫向位移工況,且產生的支反力較小[3,4]。
運載火箭三鉸鏈管路中包含3個方向鉸鏈補償器,各鉸鏈補償器的變形能力決定了管路的整體補償能力。因此在三鉸鏈管路方案設計時,一項重要的工作即為評估補償工況下管路中各鉸鏈補償器角位移,確保其不超過補償器最大變形量要求。
對于結構相對簡單的平面三鉸鏈管路,將其簡化為包含3個鉸鏈的桿件系統后,可通過幾何方法對管路變形時各鉸鏈補償器的角位移進行理論計算[5,6]。在計算空間三鉸鏈管路的補償器變形時,部分研究[7,8]采用了平面簡化的方法:首先將空間管路化簡為2個正交平面內的平面管路,在上述平面內分別計算補償器角位移分量后,通過角度合成獲得最終結果。
對于具有復雜三維走向的空間三鉸鏈管路,通過上述平面簡化方法計算補償器角位移時難免引入較大建模誤差,此時需要開發更準確的理論計算方法。除此之外,更為便捷的方法是通過有限元仿真[9]或靜力加載試驗[10],對與管路在補償工況下的結構變形進行模擬或復現,進而提取或測量各個補償器的變形角度。
本文選擇某型號三鉸鏈自生增壓管為研究對象,分別采用自研理論計算方法、有限元仿真方法和靜力試驗方法對拉伸補償工況下管路中3個鉸鏈補償器的變形情況進行評估,并對3種方法的實施過程和結果進行了對比分析。
1 方法和原理
1.1 自研理論計算方法
考慮到自生增壓管結構的復雜性,本文采用自研理論計算方法對補償器角位移進行分析。與常規的平面簡化方法不同,自研理論計算方法首先建立了三鉸鏈管路的通用幾何模型,如圖1所示。模型中3個鉸鏈補償器的編號分別為1#、2#、3#。以鉸鏈中心為邊界,可將管路分為A、B、C、D4段,其中A段、D段管路的末端分別為邊界A0和D0。位移邊界條件通常施加于A0和D0端。
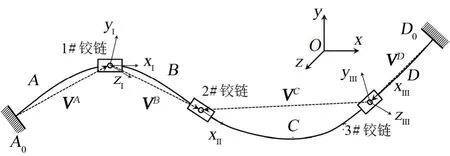
圖1 空間三鉸鏈管路的幾何模型Fig.1 Geometric Model of a Three-hinge Pipe with Three-dimensional Route
假設管路中鉸鏈補償器的剛度遠小于各管段的剛度,可將管段簡化為剛體,并使用4個空間矢量VA、VB、VC和VD描述其位置關系。空間矢量的初始值可通過管路的幾何構型確定。對于發生補償變形的管路,將1#、3#鉸鏈補償器的角位移參數θ1、θ3設置為自變量。由于每個鉸鏈補償器包含2個自由度,因此θ1、θ3各包含2個分量。結合各空間矢量的初始值以及補償邊界位移,可分別通過θ1、θ3計算補償變形后各管段空間矢量的值,記為V′A(θ1)、V′B(θ1)以及V′C(θ3)、V′D(θ3)。利用2#鉸鏈補償器處管路連續的條件,可構建關于θ1、θ3的方程組:

式中X0A、X0D為邊界A0、D0的初始位置,u0A、0Du為管路A0、D0端的線位移矢量
式(1)包含3個方程,不足以求解θ1、θ3的4個分量值,此時可結合最小變形能原理建立補充方程。假設3個鉸鏈補償器剛度一致且發生彈性變形,其角位移幅值分別為Θ1、Θ2、Θ3,則真實的θ1、θ3應使得鉸鏈補償器的總變形E能達到最小值,即:

式中K為各鉸鏈補償器的剛度;Θ1、Θ3可分別由θ1、θ3計算得到,Θ2可由B、C管段變形前后的空間矢量VB、VC、V′B(θ1)和V′C(θ3)計算得到。由此可見,(Θ21+Θ22+Θ23)
也是θ1、θ3的函數,采用最小二乘法,可將式(2)轉化為4個關于θ1、θ3分量的方程作為補充方程。
求解由式(1)以及補充方程構成的條件極值問題可確定θ1、θ3的值,進而計算各鉸鏈補償器的角位移幅值Θ1、Θ2、Θ3。
1.2 有限元仿真方法
通過有限元仿真確定管路中鉸鏈補償器的角位移時,需要按照管路的真實走向建立有限元模型。為了獲得較精確的分析結果,建模時應考慮鉸鏈補償器的結構細節,建立包括接頭、波紋管以及連接裝置在內的精細化模型。完成網格劃分并設置材料參數、約束條件、載荷及補償邊界條件后,通過靜力學分析可獲得整管的補償變形情況。
分別提取管路變形后鉸鏈補償器兩側端面上的節點坐標,進行平面擬合后,可獲得如下形式的空間平面方程:

式中l、m、n分別為擬合平面方程中參數x、y、z的系數。
根據式(3)可計算該平面的單位法向量n為

最后,鉸鏈補償器角位移幅值Θ可通過補償器兩側端面的單位法向量為n1、n2計算得到:

1.3 靜力試驗方法
靜力試驗方法通過對真實管路產品施加補償工況的溫度、壓力、位移等邊界條件,使得管路發生補償變形。在變形狀態下,測量各鉸鏈補償器邊緣距離的最大值Lmax、最小值Lmin,并按照下式計算補償器的角位移:

式中Φ為鉸鏈補償器邊緣直徑。
2 三鉸鏈管路補償器角位移計算及測量
2.1 管路結構及補償工況
某型號自生增壓管路采用三鉸鏈補償方案,管路結構如圖2所示。管路A、B、C、D段分別為平面彎管,通過鉸鏈補償器連接。管路組焊時各管段所在的平面并不重疊,因此管路整體呈現復雜三維走向。安裝工況下,管路A0端固定、D0端沿法蘭軸向進行預拉伸,拉伸量為80~120 mm。已知管路中鉸鏈補償器的最大設計變形量為10°,為了避免管路安裝上箭后補償器變形量過大,需要對拉伸補償工況下補償器角位移進行評估。
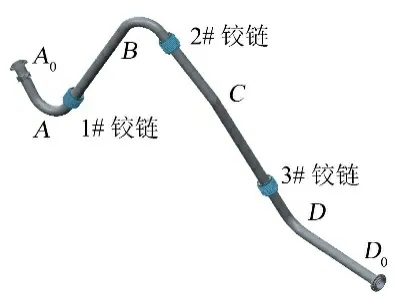
圖2 某型號增壓管路結構Fig.2 Structure of A Three-hinge Self-pressurization Pipe
2.2 理論計算
分別提取自生增壓管路A0端、D0端法蘭中心坐標、3個鉸鏈補償器中心坐標以及單位軸向矢量作為輸入條件,分別設定D0端拉伸位移量為80 mm、100 mm、120 mm,使用自研理論計算方法對補償器角位移進行計算分析。計算過程中涉及復雜的非線性方程求解,采用Levenberg-Maquardt方法,通過Matlab自編程序進行迭代計算,程序流程如圖3所示。其中角位移分量的初始值為-1~1°范圍內的非零隨機角度值。Levenberg-Maquardt迭代過程中設置了用于調節迭代步長的參量λ:當某次迭代后殘差減小時,接受迭代結果并將λ縮小10倍,以增加下一次迭代步長;否則,不接受迭代結果,并將λ增大10倍重新計算。當λ值很大時,說明殘差已難以進一步減小,可認為迭代收斂。本文以λ大于1010為迭代收斂條件。
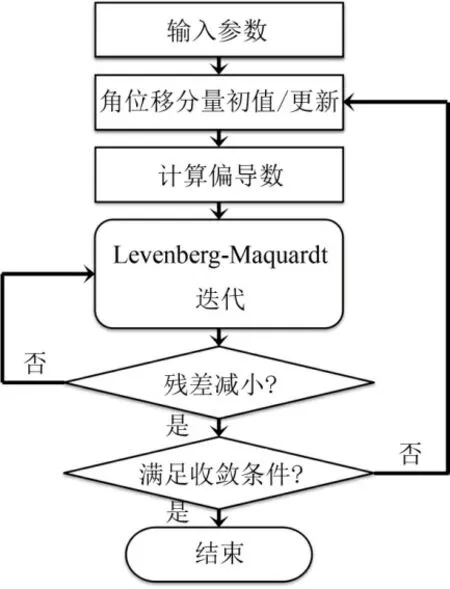
圖3 自研理論方法計算流程Fig.3 Calculation Flowchart of the Self-developed Theoretical Method
2.3 有限元仿真
除理論計算外,使用有限元軟件ABAQUS對圖2中三鉸鏈管路的拉伸變形進行了仿真分析。有限元建模時,將管路中各零件視為變形體,并賦予彈塑性材料屬性,材料參數詳見表1。導管、波紋管為薄壁結構,模型中將其簡化為三維曲面,使用S4R單元進行網格劃分;接頭、法蘭等零件為三維實體結構,使用C3D8R單元進行網格劃分。圖4為局部管路結構(鉸鏈補償器)的網格劃分情況。同時,考慮管路真實裝配情況,設置了各零件之間的連接關系:對于通過焊接相連的零件,模型中在對應位置設置了“Tie”約束;鉸鏈補償器內部為接頭與連接裝置的連接方式為鉸接,模型中使用“Hinge”連接器模擬了上述鉸接機構。
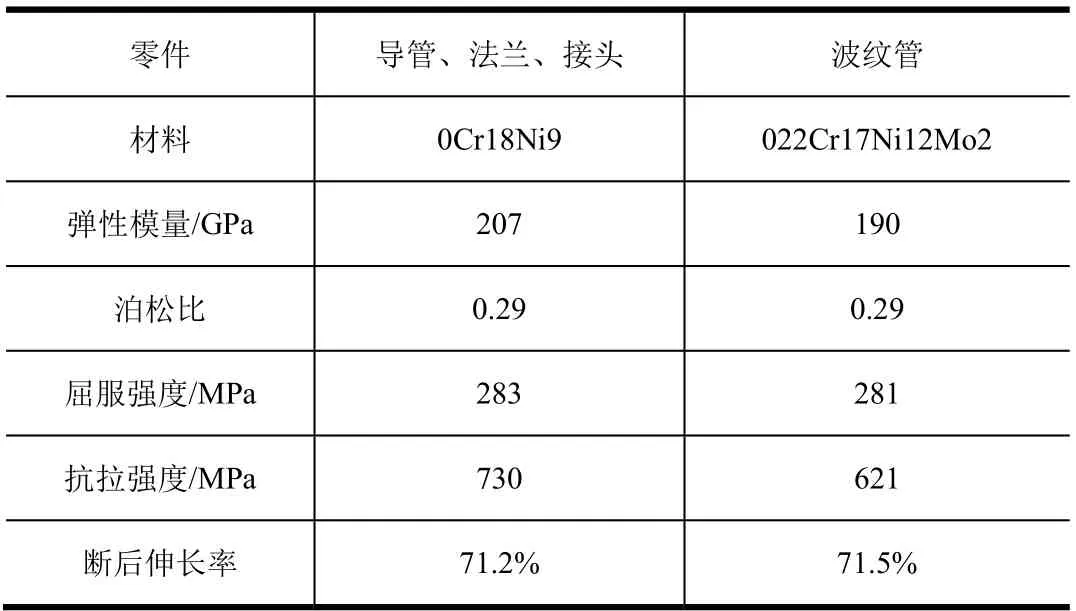
表1 三鉸鏈管路有限元仿真材料參數Tab.1 Material Parameters Used in the FEM Analysis of the Three-hinge Pipe
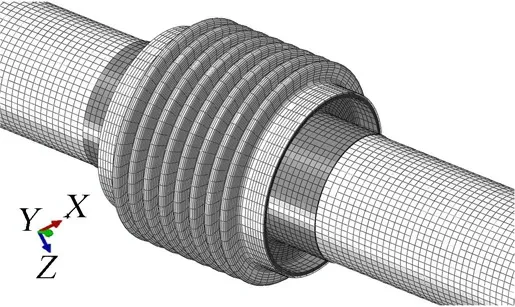
圖4 局部管路結構(鉸鏈補償器)的有限元模型Fig.4 Finite Element Model of the Local Pipe Structure (Hinged Expansion Joint)
分析中考慮常溫環境條件、管路內部不充壓的狀態,設置管路A0端為固支邊界,并在管路D0端施加位移邊界條件。設置管路D0端拉伸位移分別為80 mm、100 mm、120 mm,分別使用“Static, General”分析步對管路補償變形進行靜力分析。
2.4 試驗測量
為了研究拉伸補償工況下真實管路產品中鉸鏈補償器的變形情況,本文制備了圖1所示三鉸鏈增壓管的試驗件,用于進行靜力拉伸試驗。管路試驗裝置如圖5所示。管路安裝時,將A0端固定于工裝上,將D0端與橫梁工裝連接。試驗過程中通過移動橫梁工裝,使管路D0端沿著圖5中虛線箭頭所示的位移方向分別移動80 mm、100 mm、120 mm,模擬管路預拉伸裝配工況。每種拉伸狀態下,分別使用刻度尺(最小刻度1 mm)沿著各鉸鏈補償器周向測量其邊緣距離。讀取各補償器邊緣距離的最大值Lmax和最小值Lmin后,結合補償器邊緣直徑Φ計算其角位移值。本文試驗中,自生增壓管鉸鏈補償器邊緣直徑為79 mm。
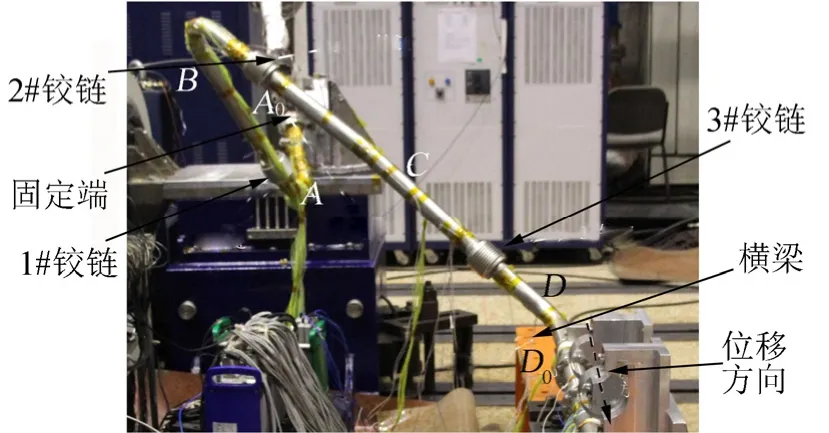
圖5 管路試驗裝置Fig.5 Experimental Setup of the Static Tensile Test
3 結果和討論
3.1 理論計算結果
采用理論計算方法獲得的自生增壓管補償變形情況如圖6所示。圖中給出了變形前、后三鉸鏈管路鉸鏈補償器中心的連線。理論計算獲得了不同拉伸量下3個鉸鏈補償器的角位移幅值,詳見表2中“理論計算”。
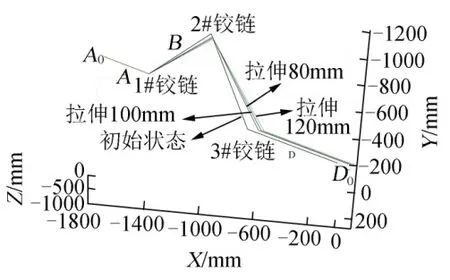
圖6 理論計算獲得的自生增壓管補償變形Fig.6 Compensation Deformations of the Self-pressurization Pipe Obtained by Theoretical Calculation
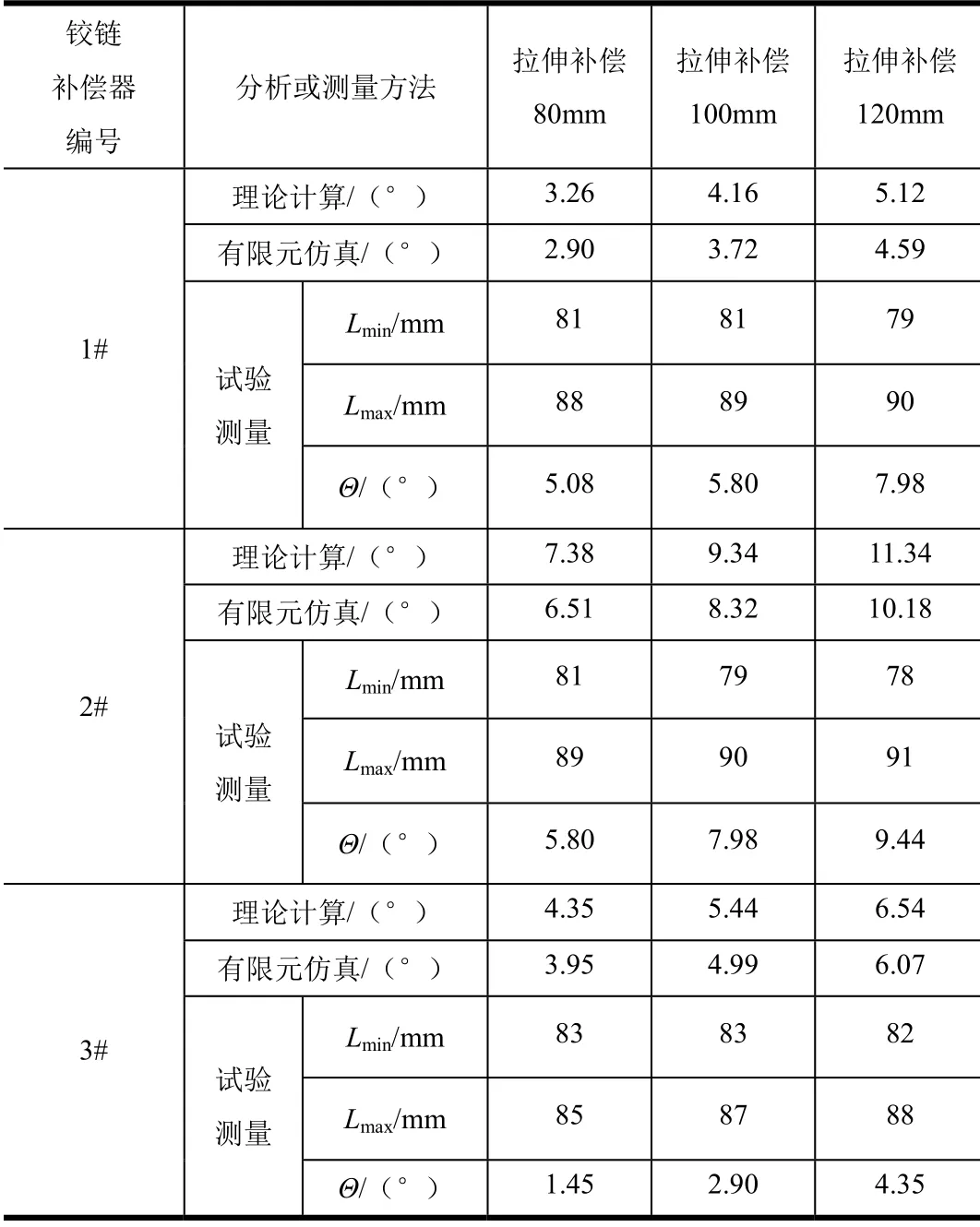
表2 鉸鏈補償器角位移計算及測量結果Tab.2 The Calculated and Measured Angular Displacements of the Hinged Expansion Joints
3.2 有限元仿真結果
不同拉伸補償量下,自生增壓管的整管變形有限元仿真結果如圖7所示。由圖7可知,管路的補償功能主要通過鉸鏈補償器的變形實現。提取3個鉸鏈補償器兩端節點坐標,通過平面擬合及平面法向量夾角計算,可獲得鉸鏈補償器的角位移,詳見表2中“有限元仿真”。
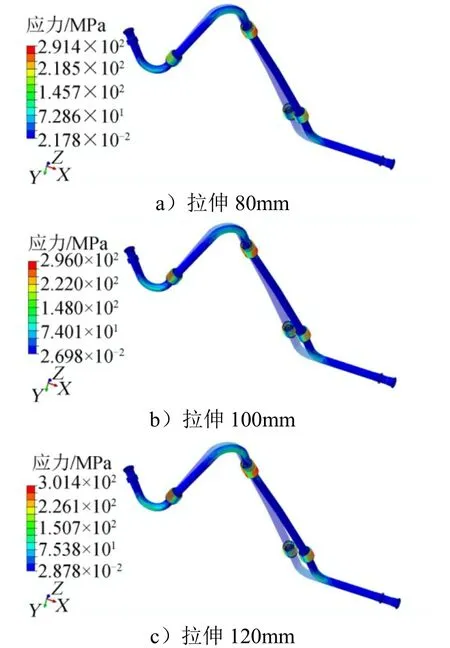
圖7 有限元仿真獲得的自生增壓管補償變形Fig.7 Compensation Deformations of the Self-pressurization Pipe Obtained by FEM Simulation
3.3 靜力試驗測量結果
在管路靜力拉伸試驗中,管路拉伸后鉸鏈補償器的變形情況如圖8所示。按照上文所述方法,本文分別在管路拉伸80 mm、100 mm、120 mm后測量了3個鉸鏈補償器的最大和最小邊緣距離,并根據式(6)計算了鉸鏈補償器的角位移。各拉伸工況下補償器最大、最小邊緣距離測量結果以及補償器角位移試驗結果見表2中“試驗測量”。

圖8 自生增壓管靜力拉伸試驗時鉸鏈補償器的變形Fig.8 Deformation of a Hinged Expansion Joint in a Static Tensile Test of the Self-pressurization Pipe Specimen
3.4 測量結果分析和對比
3.4.1 一致性分析
通過3種方法對某型號三鉸鏈自生增壓管鉸鏈補償器進行角位移評估,結果一致表明:拉伸補償工況下,2#鉸鏈補償器的角位移值明顯高于1#、3#鉸鏈補償器。因此,該管路的最大補償能力應根據2#鉸鏈補償器來確定。考慮鉸鏈補償器最大變形量為10°,確定自生增壓管的最大安裝預拉伸量為100 mm。
3.4.2 差異性分析
對比理論計算結果與有限元仿真結果可見:兩種方法獲得的鉸鏈補償器角位移一致性較好。以有限元結果為基準,計算兩種方法角位移分析結果的最大相對誤差為13.36%。該結果說明采用自研理論計算方法與有限元仿真方法均可完成三鉸鏈管路補償器角位移評估。造成分析結果差異的主要原因在于:a)理論計算方法假設管路中各管段均為剛體;而有限元分析結果(見圖7)表明,管路通過補償器變形進行邊界補償時,各管段折彎處通常為高應力區域,管段本體會發生變形,與上述剛體假設不符。b)理論方法計算變形能時將鉸鏈補償器視為線彈性元件;而實際上,鉸鏈補償器變形時波紋管會發生局部塑性變形,補償器的整體性能并非理想線彈性,與線彈性假設不符。由于上述差異,理論計算結果的準確度通常不及有限元仿真結果。盡管如此,理論計算可通過編程實現批量、自動化處理,分析效率顯著高于有限元仿真方法。
對比試驗測量與理論計算、有限元仿真結果可見:不同拉伸補償量下,3種方法獲得的鏈補償器角位移變化規律一致,但是數值存在差異。相同拉伸量下,1#鉸鏈補償器角位移的試驗測量值偏大,而2#、3#鉸鏈補償器角位移的試驗測量值偏小。分析造成上述偏差的主要原因為:理論計算、有限元仿真均未考慮鉸鏈補償器的剛度差異和內部摩擦力,但實際上不同鉸鏈補償器的剛度和順滑程度通常存在差異。當管路中某一鉸鏈補償器剛度或摩擦力較小時,該補償器在管路補償變形是的角位移量將呈現偏大趨勢。相對于理論計算和有限元分析方法,試驗測量的優勢在于能夠避免模型簡化引入的誤差,最真實地反應管路產品的補償特性;但是由于周期較長、成本較高,試驗測量方法通常管路研制方案的最終驗證時才使用。此外,在試驗過程中對鉸鏈補償器最大、最小邊緣距離位置的判斷和測量無法做到絕對準確,也會引入一定的誤差。
4 結 論
本文以某型號三鉸鏈自生增壓管為研究對象,分別采用自研理論計算方法、有限元仿真方法和靜力試驗方法對拉伸補償工況下管路中3個鉸鏈補償器的變形情況進行評估。通過評估結果的一致性和差異性分析,給出該管路產品的補償特性,同時對3種方法的優勢和局限性進行了對比。研究結果可為三鉸鏈管路設計時鉸鏈補償器變形量評估方法的選用提供參考。
猜你喜歡
中華詩詞(2020年1期)2020-09-21 09:24:52
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18