智能太陽能公交車站控制系統的研究與設計
2021-06-17 06:53:30李冰計京鴻
電子制作 2021年1期
李冰,計京鴻
(哈爾濱華德學院機器人工程學院,黑龍江哈爾濱,150025)
1 系統方案設計
■1.1 智能太陽能公交車站控制系統的組成
本系統是將太陽能轉換成公交站各種用電設備所使用的電能。太陽能電池板在陽光下,將光能轉換為電能并通過控制電路把光能產生的電能進行轉換并為蓄電池供電,同時也為其他設備供電,首先將太陽能轉換的電能經過DC-DC電路進行轉換,轉換成公交站用電設備所使用的電壓,并通過互感器來檢測DC-DC輸出端的電壓和電流,保證輸出端的正常工作,單片機輸出PWM來調節輸出電壓,最后由充電電路為設備和電池供電。作為安全性的電池,目前蓄電池的充電方式一般為恒流恒壓充電:首先以穩定電流充電,當電池電壓升高至一定值時,電路狀態改為穩定電壓充電,之后電流逐漸降低至零,充電完成。利用單片機進行智能控制,采用模塊式結構,使太陽能到電能的順利轉換,同時系統還使用光強傳感器,當光強減弱時,系統啟動照明系統,為公交站提供路燈,通過對輸出電流電壓的調節,可對公交站的廣告牌、站牌進行供電,如果需要遠程控制也可以通過無線模塊進行遠距離的控制。
本系統的結構框圖如圖1所示。
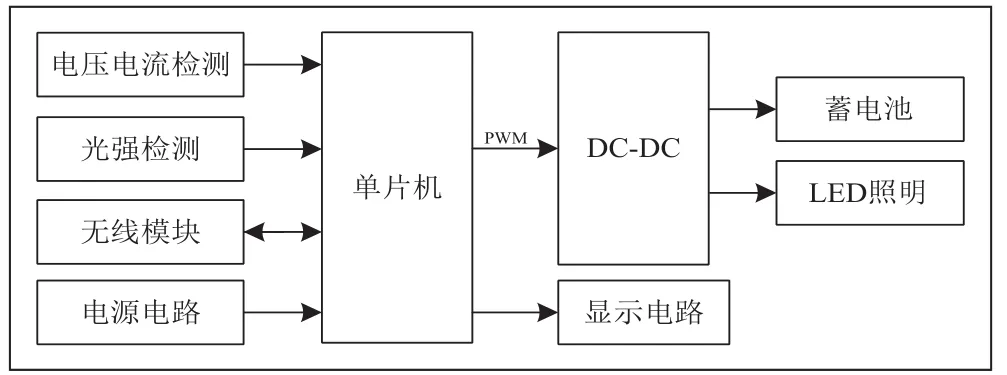
圖1 系統結構框圖
■1.2 智能太陽能公交車站控制系統的基本功能
(1)太陽能電池板將太陽的光能,熱能轉換成電能,并設計控制電路;
(2)DC-DC電路,將太陽能電池板的輸出電壓降低12V;
(3)設計單片機控制系統,通過單片機輸出PWM波對輸出電壓進行調整;
(4)對輸出電壓和電流進行監測,保證輸出的穩定性,選用MAX471芯片來進行信號的放大和轉換;
(5)系統通過無線模塊實現遠程數據傳輸,對公交站控制系統進行監測和控制,避免了長距離布線帶來的困擾,這里選擇NRF24L01無線的方式;
(6)光強檢測采用BH1750傳感器,內置16bitAD轉換器,直接數字輸出,可對廣泛的亮度進行高精度測定,當光強小于某一數值時,系統開啟照明系統;
(7)液晶顯示器顯示當前系統的各項參數及站點信息。
2 系統的硬件設計
■2.1 電能轉換電路設計
智能公交站的電能轉換電路是由肖特基二極管,濾波電容,MOS管,LM7812組成的,MOS管的柵極是通過單片機輸出的PWM方波來控制的,通過控制柵極來選擇所需的電路,當Q1導通時,太陽能電池板通過二極管和MOS管為蓄電池充電,二極管的型號為1N1148,它的作用是防止反向電壓,防止倒灌,然后再經過電容的濾波,保證電源的紋波不影響充電的效率,在經過導通的MOS管向蓄電池充電,充電的速度可以通過MOS管的導通頻率來影響,也可以通過電源的調整來影響,大的電容可以很好的濾除直流電路中的交流成分,小的電容可以濾除紋波,使電源更穩定。當蓄電池充滿電后,檢測電路會把蓄電池的電壓電流檢測的信息發送給單片機,單片機通過數據判斷出蓄電池的狀態,如果蓄電池充滿電,則單片機控制MOS管Q1關斷,停止電源對蓄電池的充電,然后發出PWM方波來控制MOS管Q2開通,當Q2導通后,蓄電池就可以為負載供電了,在這些階段中,檢測電路會實時的檢測電路的狀態,包括電路的電流和蓄電池兩端的電。此部分電路原理圖如圖2所示。
■2.2 模數轉換電路設計
本控制系統需要使用3個模擬量輸入通道,分別對蓄電池的電壓、電流以及光敏電阻的模擬量進行轉換,TLC2543模/數轉換模塊具有十一個輸入通道,內部集成分辨率為十二位的串行A/D轉換器,每次的轉換都是逐次比較轉換,每次模擬量的采樣都有芯片自己完成,采樣后芯片也會自動進行模擬量的保持,這些都是由內部集成的采樣保持電路自動完成。TLC2543內部集成的A/D轉換器采樣精準,而且外部的參考電壓是差分高阻抗的基準電壓,這種電路的配合能提高轉換刻度,同時降低內部的模擬電路的偏差、信號邏輯電路的偏移量,隔離外部電源波動的影響降低電源噪聲。這種多輸入通道、應用靈活的模/數轉換,極小的線性誤差小,特別適用于嵌入式系統數據采集和處理。模數轉換電路圖如圖3所示。

圖2 電能轉換電路圖

圖3 模數轉換電路
■2.3 電流檢測電路設計
在本控制系統中,輸出端的電壓通過分壓電阻進行檢測,然后通過ADC進行轉換,電流則通過專業用的芯片來進行,MAX471是電流-電壓型運算放大器經常用于電源電路中,檢測室通過電阻將電流轉變成電壓,電壓值就可以通過模數轉換電路來進行,將其與模數芯片的輸入引腳連接,就可以進行轉換,在本次設計中,要求能夠檢測出蓄電池兩端的電壓和電路中的電流,電壓要求檢測到小數點后一位即可,因此,MAX471完全滿足要求,它的內部有一個35mΩ的電流采樣電阻可以測量±3A的電流,MAX471有一個電流輸出端。電流檢測電路如圖4所示。

圖4 電流檢測電路
■2.4 液晶顯示電路設計
通過液晶顯示器來顯示公交站控制系統的狀態以及到站信息等,因為需要顯示的數據比較多,所以顯示模塊選用LCD12864液晶模塊,它是自帶中文標準字庫點陣液晶顯示器,它主要由行驅動器/列驅動器及點陣二極管組成,可完成圖形顯示,也可以顯示8×4個漢字。VCC一般接5V電源,VEE以及VL連接一個滑動變阻器,引腳BL+和BL-,是液晶屏的背光,可以直接接在VCC和GND上。液晶顯示電路如圖5所示。

圖5 液晶顯示電路

圖6 無線通信電路
■2.5 無線控制電路設計
為了實現公交站控制系統的遠程控制,使用無線模塊連接上/下位機,在本次設計中,公交站的控制系統通過無線模塊將系統數據發送給上位機,上位機處理數據后,得到實際的數據,數據在經過單片機進行處理,在對外圍電路進行控制,這里我們使用的是NRF24L01通信模塊,這種模塊的成熟度較高,信號的完整性比較好,但是傳輸距離有限,大于1000米后,信號會出現衰減,因此,系統的使用還要注意距離的限制。無線通信電路圖如圖6所示。
■2.6 光控路燈電路設計
在智能公交站控制系統中,需要對路燈進行夜間的控制,這就需要對光線強度進行采集,當光強達到一定強度的下限時,單片機就會通過控制繼電器電路,而繼電器電路控制路燈的供電系統,當繼電器打開路燈供電系統后,路燈就會被點亮。光控路燈電路圖如圖7所示。

圖7 光控路燈電路圖
3 系統軟件設計
本控制系統采用單片機作為控制核心,單片機負責輸出PWM來控制電能轉換電路,同時對傳感器的數據進行處理,主程序包含了各子程序,并對主函數內的子程序循環執行,直到完成指定功能后再次循環,通過子程序實現具體功能,系統的主程序流程圖如圖8所示。

圖8 系統主程序流程圖
4 結語
本文所設計的智能太陽能公交站控制系統,采用實用的51系列單片機和模數轉換芯片,實現了對蓄電池主電路的電壓,電流監測,使系統更加穩定可靠,性價比得以大幅度的提高。通過單片機來控制系統的運行和數據的處理,采集蓄電池兩端的電壓來監測蓄電池的狀態,通過專用的運算放大器來實現電流的采集和檢測,并通過模數轉換電路將模擬量轉換成數字量,然后通過程序設計,連接各個子電路,將他們的功能結合在一起,并將數字量進行處理,得到實際的電壓電流值,單片機接收到數據后通過LCD1602顯示出來。控制部分采用光耦進行隔離和驅動,大大減輕了單片機的負擔,然后再通過光耦來控制三極管的工作狀態,實現電路的切換,這樣既防止了信號的串擾,也增強了單片機的驅動能力。保護電路的設計也十分的穩定可靠,不僅考慮到充放電的紋波影響,還考慮到了能量的續流,防止電路發生短路和倒灌,通過無線模塊與上位機進行通信,光敏電阻可以實現對路燈的控制,實現了夜間的自動照明功能。通過電源電路和單片機電路的結合,實現了基于單片機的公交站控制系統,通過硬件設計和軟件設計,系統已經具備了豐富的功能,完成了對傳統公交站的改進。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
奧秘(創新大賽)(2020年1期)2020-05-22 02:42:38
電子制作(2019年13期)2020-01-14 03:15:28
小學科學(學生版)(2019年10期)2019-11-16 08:55:02
電子制作(2019年15期)2019-08-27 01:12:10
小哥白尼(趣味科學)(2019年12期)2019-06-15 10:56:32
電子制作(2019年9期)2019-05-30 09:42:02
人大建設(2018年2期)2018-04-18 12:17:00
