醫(yī)用機(jī)器人自行走及導(dǎo)航定位控制系統(tǒng)
2021-06-17 07:12:02張泓王凌云曾小峰申龍章通訊作者
電子制作 2021年5期
關(guān)鍵詞:智能化
張泓,王凌云,曾小峰,申龍章,(通訊作者)
(1.南華大學(xué)電氣工程學(xué)院,湖南衡陽(yáng),421000;2.南華大學(xué)機(jī)械工程學(xué)院,湖南衡陽(yáng),421000)
0 引言
跟隨智能化發(fā)展的步伐,醫(yī)用機(jī)器人開(kāi)始興起,并逐漸成為機(jī)器人行業(yè)的新發(fā)展方向,醫(yī)用機(jī)器人的面世對(duì)醫(yī)療衛(wèi)生領(lǐng)域產(chǎn)生了深遠(yuǎn)的影響。近年來(lái),人口老齡化形勢(shì)加劇,但得益于醫(yī)療保障體系的不斷完善,醫(yī)療行業(yè)迸發(fā)出前所未有的活力,醫(yī)用機(jī)器人自然成為了該行業(yè)的香餑餑。根據(jù)供求關(guān)系理論可知,醫(yī)用機(jī)器人具有廣闊的市場(chǎng)前景。
醫(yī)用機(jī)器人的類型頗多,可應(yīng)用于配送、臨床醫(yī)療、護(hù)理、醫(yī)用教學(xué)、康復(fù)、消毒等方面,其豐富的用途帶給了醫(yī)療衛(wèi)生領(lǐng)域難以想象的改變[1-2],但“九層之臺(tái),起于累土”,多功能的實(shí)現(xiàn)是從基礎(chǔ)控制系統(tǒng)開(kāi)始的。因此,研究針對(duì)醫(yī)用機(jī)器人的自行走及導(dǎo)航定位控制顯得尤為重要。
1 醫(yī)用機(jī)器人的行走智能化
對(duì)于醫(yī)用機(jī)器人行走智能化的研究,需充分考慮醫(yī)院的環(huán)境條件和基本要求。醫(yī)院大多處于平坦路面,存在大量病人行走,要求醫(yī)用機(jī)器人體積不能大,且能響應(yīng)迅速、全向避障;醫(yī)務(wù)人員工作繁忙,需要醫(yī)用機(jī)器人智能化程度高,能自主完成任務(wù);醫(yī)院容錯(cuò)率幾乎為零,對(duì)醫(yī)用機(jī)器人的嚴(yán)謹(jǐn)性要求非常高。根據(jù)以上要求,本文以消毒機(jī)器人為例進(jìn)行研究,由此可舉一反三。
■1.1 醫(yī)用消毒機(jī)器人的迫切需求
傳統(tǒng)的消毒方式主要靠人工消毒,隨意性強(qiáng)、效率不高、效果不佳,存在消毒者自身感染風(fēng)險(xiǎn)。
隨著科技發(fā)展,消毒機(jī)器人憑著多種優(yōu)點(diǎn)開(kāi)始嶄露頭角,但僅限于小范圍發(fā)展。直到新型冠狀病毒肺炎(COVID-19)席卷全球,消毒機(jī)器人正式從機(jī)器人行業(yè)中脫穎而出,充當(dāng)了公共衛(wèi)生安全守護(hù)者的形象,逐漸成為抗疫不可或缺的一員。
針對(duì)醫(yī)院而言,醫(yī)用消毒機(jī)器人既可減少醫(yī)護(hù)人員職業(yè)暴露風(fēng)險(xiǎn),又可避免感染傳播。其不分晝夜,可隨時(shí)消毒清潔,相比人工而言效率更高。在抗疫前線,消毒機(jī)器人的使用更是大大的減少了防護(hù)物資的消耗。從長(zhǎng)遠(yuǎn)來(lái)看,醫(yī)用消毒機(jī)器人提高了效率,減少了人工成本,使醫(yī)院有更多的時(shí)間與資源投入到醫(yī)療事業(yè)。
■1.2 醫(yī)用消毒機(jī)器人產(chǎn)品現(xiàn)狀
縱觀行業(yè)內(nèi)醫(yī)用消毒機(jī)器人產(chǎn)品現(xiàn)狀,無(wú)論是國(guó)內(nèi)還是國(guó)際上,大多都擁有著集成各種模塊的自主行走、定位導(dǎo)航控制系統(tǒng),功能強(qiáng)大,在實(shí)際應(yīng)用中各有特色和優(yōu)勢(shì)。
上海擎朗智能科技有限公司發(fā)布的消毒機(jī)器人M2,如圖1(a)所示,其擁有全自主定位導(dǎo)航,能智能避障、自主乘坐電梯,提供跨樓層消毒防疫服務(wù)。

圖1 消毒機(jī)器人
成都神識(shí)高科技有限公司發(fā)布的防疫消毒機(jī)器人,如圖1(b)所示,這款產(chǎn)品擁有履帶底盤(pán),地形適應(yīng)性高,可自主導(dǎo)航進(jìn)行消毒作業(yè)。
創(chuàng)澤智能機(jī)器人集團(tuán)股份有限公司發(fā)布的霧化機(jī)器人YCZ-2020,圖1(c)所示。這款產(chǎn)品搭載攝像頭、超聲波雷達(dá)等設(shè)備,具有自主行走、自主移動(dòng)式多點(diǎn)消毒等功能。以及紫外線等離子消毒機(jī)器人CZ-RobotDF-DZ,圖1(d)所示。這款機(jī)器人能夠根據(jù)設(shè)定的路線自主移動(dòng),滿足在復(fù)雜室內(nèi)環(huán)境下自動(dòng)、定時(shí)、精準(zhǔn)的消毒需求。
丹麥機(jī)器人公司BlueOcean Robotics制造的一款UVD機(jī)器人也可實(shí)現(xiàn)病房自主移動(dòng),強(qiáng)力消毒。
對(duì)于現(xiàn)有醫(yī)用消毒機(jī)器人而言,基本是按特定路線行駛,通過(guò)各種導(dǎo)航定位方法進(jìn)行消毒作業(yè),配合攝像頭和雷達(dá)等設(shè)備實(shí)現(xiàn)避障。基于以上背景,研究一種行走智能化控制系統(tǒng)設(shè)計(jì),該控制系統(tǒng)涉及無(wú)線寬帶(WiFi)定位技術(shù)、超聲波雷達(dá)技術(shù)和軌跡跟蹤技術(shù),可全自主導(dǎo)航定位,瞬時(shí)反應(yīng),全向避障,外加溫度傳感器,對(duì)室溫進(jìn)行及時(shí)反饋。
2 行走智能化系統(tǒng)設(shè)計(jì)
為實(shí)現(xiàn)消毒機(jī)器人的行走智能化,需要消毒機(jī)器人具有一定精度的導(dǎo)航定位能力,然后按指定路線到達(dá)指定消毒區(qū)域,若行進(jìn)路線存在障礙物,則檢測(cè)繞過(guò)障礙物,到達(dá)后,消毒機(jī)器人開(kāi)始消毒,流程圖如圖2所示。其主要靠以下幾個(gè)模塊來(lái)實(shí)現(xiàn)。
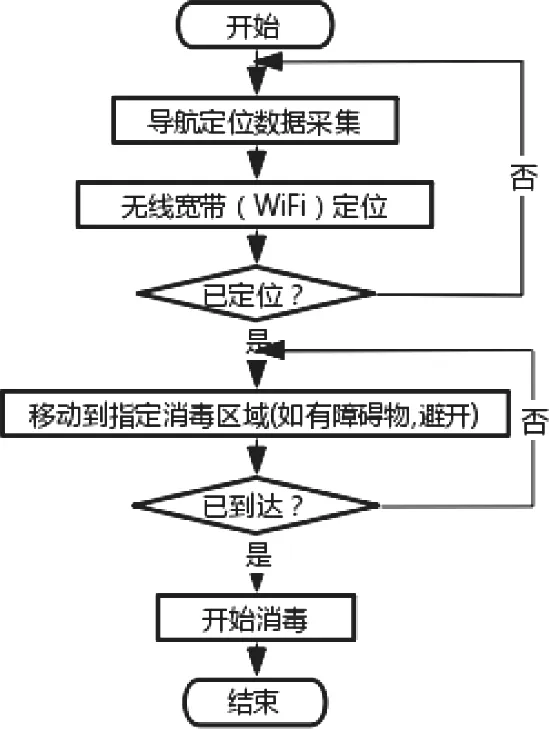
圖2 行走智能化系統(tǒng)流程圖
■2.1 行走機(jī)構(gòu)模塊
行走機(jī)構(gòu)作為自行走機(jī)器人的硬件部分,在控制系統(tǒng)中起著執(zhí)行作用。行走機(jī)構(gòu)根據(jù)其結(jié)構(gòu)可分為車(chē)輪式、履帶式、步行式等。
車(chē)輪式行走機(jī)構(gòu)應(yīng)用最為廣泛,因其結(jié)構(gòu)簡(jiǎn)單、功率消耗小、移動(dòng)時(shí)較穩(wěn)定,但缺點(diǎn)是遇到復(fù)雜環(huán)境適應(yīng)性不強(qiáng)。面對(duì)存在的不足,可通過(guò)結(jié)構(gòu)設(shè)計(jì)加強(qiáng)其性能,如行星輪式行走機(jī)構(gòu),提高了通過(guò)性能,使其越障能力得到加強(qiáng)[3]。
履帶式行走機(jī)構(gòu)的機(jī)器人不易打滑,可行走在泥土路面,具有通過(guò)性好、適應(yīng)性好等優(yōu)點(diǎn),但轉(zhuǎn)向不便、行走緩慢,存在功率消耗大的問(wèn)題。可以結(jié)合前兩種機(jī)構(gòu)的特點(diǎn)以提高其性能,如輪履式機(jī)構(gòu),在不同環(huán)境可切換輪履模式,使其適應(yīng)性相較于單獨(dú)的車(chē)輪式和履帶式更強(qiáng)[4]。
步行式機(jī)構(gòu)有兩足、三足、四足、八足等形式,類似于動(dòng)物行走。采用步行機(jī)構(gòu)的步行機(jī)器人,能夠在不規(guī)則地形運(yùn)動(dòng),其穩(wěn)定性好,但控制上難度很大。
步行式機(jī)構(gòu)因其控制難度大,不予采用;履帶式機(jī)構(gòu)雖適應(yīng)性好,但行動(dòng)緩慢,存在噪聲,不適合醫(yī)院安靜的環(huán)境;故系統(tǒng)的行走機(jī)構(gòu)采用三個(gè)輪子的車(chē)輪式機(jī)構(gòu),電機(jī)驅(qū)動(dòng)器控制輪轂電機(jī)車(chē)輪并與萬(wàn)向輪配合,自動(dòng)行走、轉(zhuǎn)向。
本醫(yī)用消毒機(jī)器人包括移動(dòng)平臺(tái)和半開(kāi)式箱體結(jié)構(gòu),移動(dòng)平臺(tái)包括內(nèi)部骨架和內(nèi)設(shè)裝置,其內(nèi)部骨架分為底板、中間板和頂板。所述底板下方設(shè)置有底盤(pán)機(jī)構(gòu)、電池以及電機(jī)驅(qū)動(dòng)器。所述底板之上設(shè)置有工控主板和開(kāi)關(guān)裝置;所述中間板上設(shè)置有超聲波雷達(dá)組件、溫度傳感器和攝像頭;箱體位于移動(dòng)平臺(tái)頂板上,其內(nèi)部裝有無(wú)線定位WiFi設(shè)備與消毒設(shè)備。
■2.2 導(dǎo)航定位模塊
現(xiàn)如今最常用的定位技術(shù)是GPS定位,但由于GPS定位信號(hào)在醫(yī)院內(nèi)部易受到障礙物遮擋,所以該行走智能化系統(tǒng)配備無(wú)線寬帶(WiFi)定位。這種定位方法滿足醫(yī)用消毒機(jī)器人定位導(dǎo)航的要求,且成本低廉。
系統(tǒng)采用基于位置指紋的算法作為WiFi定位的選擇。位置指紋法顧名思義就是對(duì)空間位置劃分坐標(biāo),貼上標(biāo)簽,其獨(dú)有的位置特征被用作位置指紋,并組建指紋庫(kù)。在得到這些特征后,通過(guò)算法得到較為精準(zhǔn)的位置[5]。
基于位置指紋的定位通常分為兩種類型。一種是基于概率性的算法,通過(guò)條件概率建立模型,通過(guò)算法推算信號(hào)特征屬于指紋庫(kù)中某個(gè)分布的可能性。該算法定位精度高,但實(shí)現(xiàn)起來(lái)較復(fù)雜。
另一種是確定型算法,將信號(hào)特征與存在指紋庫(kù)中的統(tǒng)計(jì)值相比較。指紋庫(kù)里找到與RSS(接收信號(hào)強(qiáng)度值)觀測(cè)值的歐氏距離最近的指紋,將其所對(duì)應(yīng)的位置坐標(biāo)作為待測(cè)目標(biāo)的位置。該算法精度一般,但簡(jiǎn)便易用。
消毒機(jī)器人自行走及導(dǎo)航定位系統(tǒng)無(wú)須定位精度過(guò)高,只需要能夠迅速定位,所以采用確定型算法。此定位方法同時(shí)與雷達(dá)、攝像頭配合,可有效定位導(dǎo)航,實(shí)現(xiàn)迅速避障。
■2.3 軌跡跟蹤模塊
軌跡跟蹤控制是行走智能化系統(tǒng)的重要組成部分。因?yàn)闄C(jī)器人的軌跡跟蹤屬于一種耦合的非線性系統(tǒng),不滿足Brockett鎮(zhèn)定的必要條件,因此控制方法應(yīng)采用自適應(yīng)控制、滑模控制、或者它們的組合控制。現(xiàn)有的模型控制中大多采用滑模控制,因其響應(yīng)迅速,瞬態(tài)性能良好大,但其也存在抖振等不利影響。
參照現(xiàn)有的多種模型軌跡跟蹤控制:一種是通過(guò)含積分項(xiàng)的sigmoid滑模切換函數(shù),構(gòu)建由等效控制和切換控制的自適應(yīng)滑模控制器,具有較好的控制精度[6];一種是基于線性矩陣不等式的魯棒模型預(yù)測(cè)軌跡跟蹤控制器,加入基于期望軌跡曲率的前饋控制,有效提高了跟蹤穩(wěn)定性,增強(qiáng)了系統(tǒng)魯棒性[7];一種是基于數(shù)據(jù)驅(qū)動(dòng)的高階迭代學(xué)習(xí)控制算法,利用之前迭代的輸入信息設(shè)計(jì)高階學(xué)習(xí)律,提高了控制性能,提高了控制模型的魯棒性[8];一種是基于切換增益調(diào)節(jié)的神經(jīng)滑模控制,有效地減輕了抖振,減少了跟蹤誤差,但神經(jīng)算法相對(duì)復(fù)雜[9];還有一種基于變?cè)鲆孚吔傻奈恢盟俣燃?jí)聯(lián)滑模控制方法,利用滑模控制的快速性和強(qiáng)魯棒性來(lái)提升系統(tǒng)的控制性能[10]。
作為醫(yī)用消毒機(jī)器人,需要精度合適,魯棒性強(qiáng),算法簡(jiǎn)便的控制方法。綜合比較,本文采用級(jí)聯(lián)滑模控制器,基于有限時(shí)間控制理論設(shè)計(jì)一種控制律,以提高跟蹤精度。
3 結(jié)論
本文通過(guò)對(duì)消毒機(jī)器人行走智能化的研究,以小見(jiàn)大地展現(xiàn)了醫(yī)用機(jī)器人自行走及導(dǎo)航定位的控制要求。醫(yī)用機(jī)器人對(duì)定位導(dǎo)航精度,避障的及時(shí)響應(yīng)度和機(jī)構(gòu)的合理度都有較高要求。可采用基于WiFi定位,結(jié)合攝像頭和超聲波雷達(dá)的行走智能化控制系統(tǒng),并利用級(jí)聯(lián)滑模控制提高跟蹤精度和控制系統(tǒng)的可靠性。這款醫(yī)用消毒機(jī)器人能通過(guò)軌跡跟蹤實(shí)現(xiàn)按規(guī)劃路線行駛的目的,且能實(shí)現(xiàn)迅速反應(yīng),全向避障,可通過(guò)溫度傳感器檢測(cè)室溫。后續(xù)可增加其他功能模塊,以實(shí)現(xiàn)醫(yī)用消毒機(jī)器人的多用途。
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
建材發(fā)展導(dǎo)向(2021年13期)2021-07-28 07:14:34
建材發(fā)展導(dǎo)向(2021年10期)2021-07-16 07:13:24
印刷工業(yè)(2020年4期)2020-10-27 02:46:02
印刷工業(yè)(2020年4期)2020-10-27 02:45:52
中國(guó)儲(chǔ)運(yùn)(2019年5期)2019-05-15 09:37:40
能源(2018年10期)2018-12-08 08:02:52
汽車(chē)觀察(2018年10期)2018-11-06 07:05:08
中國(guó)交通信息化(2017年4期)2017-06-06 07:21:52
中國(guó)公路(2017年12期)2017-02-06 03:07:25