MEMS陀螺儀的稀疏冗余去噪?
2021-06-16 10:36:14楊金顯韓玉鑫河南理工大學(xué)電氣工程與自動化學(xué)院導(dǎo)航制導(dǎo)實驗室河南焦作454000
傳感技術(shù)學(xué)報 2021年3期
楊金顯韓玉鑫(河南理工大學(xué)電氣工程與自動化學(xué)院導(dǎo)航制導(dǎo)實驗室,河南 焦作454000)
MEMS陀螺儀以其成本低、體積小、數(shù)據(jù)輸出率高等優(yōu)點,廣泛應(yīng)用于航空航天、隨鉆測量等領(lǐng)域[1]。由于制造工藝的限制,MEMS陀螺儀相比與傳統(tǒng)陀螺儀精度較低。在鉆頭鉆進(jìn)復(fù)雜地質(zhì)環(huán)境的過程中,受到振動的強(qiáng)烈程度不一、溫度效應(yīng)及其他隨機(jī)擾動的影響,導(dǎo)致采集的陀螺儀信號呈現(xiàn)多頻及非線性特征[2],難以補償。因此,MEMS陀螺儀的誤差補償技術(shù)顯得尤為重要。
目前,陀螺儀信號的去噪可大致分為建模和非建模的方式。建模方法[3-5]降噪是在隨機(jī)噪聲時間序列的基礎(chǔ)上建立自回歸滑動平均模型,然后利用卡爾曼濾波對模型的輸出進(jìn)行實時更新。由于卡爾曼濾波需要相對完整的信號和噪聲統(tǒng)計特性,因此其初始參數(shù)的確定較為復(fù)雜,存在收斂速度慢、初始過渡狀態(tài)長等問題。非建模方法[6-8]降噪包括數(shù)字低通濾波器、小波變換和EMD等方法。數(shù)字低通濾波器可以消除高頻噪聲,但當(dāng)信號頻帶與噪聲頻帶相近時,濾波效果較差。小波變換需要選擇分解層次和小波基,分解參數(shù)的選擇,分解結(jié)果會受到信號特性的影響。EMD方法克服了小波變換固定基函數(shù)的缺點,可有效提取非平穩(wěn)、非線性信號的瞬時特征參數(shù)和Hilbert譜,從而精準(zhǔn)分析信號特征[9]。Gu,HY等人[10]采用改進(jìn)的全集成經(jīng)驗?zāi)B(tài)分解方法將原始信號分解為一系列固有模態(tài)函數(shù),并通過閾值對固有模態(tài)函數(shù)進(jìn)行濾波;通過bagging極限學(xué)習(xí)機(jī)器的模型訓(xùn)練去噪后的子序列重構(gòu)的訓(xùn)練數(shù)據(jù)集和測試數(shù)據(jù)集,利用測試數(shù)據(jù)集對補償信號進(jìn)行預(yù)測。然而該方法需要大量的數(shù)據(jù)集,且神經(jīng)網(wǎng)絡(luò)存在收斂速度慢,易陷入局部極小點的問題。Wu YC等人[11]提出組合廣義形態(tài)濾波器的自適應(yīng)多尺度方法對陀螺儀輸出信號去噪,在變分模分解將原始信號分解為多尺度模的前提下,利用自適應(yīng)多尺度對結(jié)構(gòu)單元進(jìn)行選定,有效降低不同模態(tài)對應(yīng)的噪聲。應(yīng)用以EMD為基礎(chǔ)的智能算法及在EMD基礎(chǔ)上改進(jìn)的算法,可有效提高信號的質(zhì)量,但不能體現(xiàn)處理信號的實時性,且高頻的模態(tài)分量含有大量的噪聲,低頻部分體現(xiàn)陀螺儀信號的主要特征。
壓縮感知[12-13]理論可以利用信號的稀疏性或在其他變換域上的稀疏性,通過不等間距采樣優(yōu)化逼近真實信號。文獻(xiàn)[14-15]都針對陀螺儀信號進(jìn)行小波分解后小波系數(shù)的篩選問題,利用CS算法,轉(zhuǎn)化為小波系數(shù)稀疏性的恢復(fù)問題,通過對比不同的稀疏重構(gòu)算法,證明了CS方法對陀螺儀信號處理的有效性。Song,JL等人[16]更是應(yīng)用小波分析的方法消除MEMS陀螺儀信號中的噪聲,采用稀疏冗余的方法優(yōu)化小波系數(shù),通過滯后校正的方法降低小波分解的邊界效應(yīng)。應(yīng)用CS算法對小波系數(shù)處理需要構(gòu)建稀疏提取的構(gòu)架及挑選最稀疏的分解系數(shù),其次正交匹配追蹤或自適應(yīng)匹配追蹤的重構(gòu)算法需求較多的訓(xùn)練樣本。
針對以上分析,提出了EMD算法對陀螺儀信號進(jìn)行分解,利用兩個連續(xù)重構(gòu)陀螺儀信號的歐氏距離對高頻IMFs分量和低頻IMFs分量進(jìn)行分離,剔除高頻噪聲IMFs分量對陀螺儀測量精度的影響。利用CS理論對剩余IMFs稀疏優(yōu)化,通過對陀螺儀誤差補償項的估計,疊加重構(gòu)優(yōu)化后的剩余IMFs和誤差補償項,從而提高M(jìn)EMS陀螺儀的測量精度。
1 EMD分解及指標(biāo)參數(shù)的確定
1.1 EMD分解
通過利用陀螺儀信號局部特征的時間尺度,將其分解為一系列從高頻到低頻的振蕩IMF分量。含噪的陀螺儀信號x(t)分解出L個IMF,即模態(tài)函數(shù)分量hi(t)(1≤i≤L)和余項rL(t)。由此,陀螺儀的重構(gòu)信號可表示為:

通常,在EMD分解陀螺儀信號的模態(tài)分量中,低頻部分反映信號的主要特征,噪聲主要集中在高頻部分,剔除高頻噪聲分量的干擾,重構(gòu)剩余分量即可得到去噪后的陀螺儀信號。在多種因素的擾動下,漂移誤差的存在,需補償陀螺儀誤差減小對MIMU測量系統(tǒng)的影響。根據(jù)以上分析,含噪的陀螺儀信號可表示為:

式中:C為陀螺儀信號中高、低頻IMFs分量的分界點的指標(biāo)參數(shù),~hi(t)為陀螺儀高頻IMFs噪聲分量,hi(t)為陀螺儀低頻IMFs信息分量,w(t)為陀螺儀信號的誤差補償項。
1.2 指標(biāo)參數(shù)C的確定
MEMS陀螺儀在高溫強(qiáng)振等復(fù)雜的工作環(huán)境下,其測量精度受到較大的影響,原始信號和噪聲是未知的,因此無法完全去除陀螺儀信號中的噪聲部分。在實際應(yīng)用中,陀螺儀信號的高頻噪聲分量和低頻信息分量難以區(qū)分,無法通過絕對誤差或均方誤差實現(xiàn)分離,文獻(xiàn)[17]提出了連續(xù)均方誤差(CMSE)的方法,有效計算MEMS陀螺儀高頻信號和低頻信號分界點的指標(biāo)參數(shù)。對陀螺儀信號分解的模態(tài)分量重構(gòu)如下:

利用CMSE計算兩個連續(xù)MEMS陀螺儀重構(gòu)信號之間歐氏距離的平方,具體如下:

由于MEMS陀螺儀的噪聲主要集中在高頻部分,隨著EMD的不斷分解,噪聲的能量逐漸降低。因此,將高頻IMFs與低頻IMFs的能量分界點定在IMFs能量的第一個最小值處。由此陀螺儀信號的高、低頻模態(tài)分量指標(biāo)參數(shù)為:

式中:k的取值范圍為1≤k≤2D/3,當(dāng)MEMS陀螺信號的轉(zhuǎn)動速度達(dá)到恒速時,k取最大值2D/3。根據(jù)以上分析,可認(rèn)為兩個連續(xù)的陀螺儀重構(gòu)信號之間的歐氏距離平方越小,兩個信號之間的差值越小,對應(yīng)的hk(t)能量越低。因此,可使用CMSE方法來識別高、低頻分量指標(biāo)參數(shù)。
2 稀疏重構(gòu)及誤差補償估計
稀疏表示的基本思想是在構(gòu)建信號的測量矩陣的基礎(chǔ)上進(jìn)行表示,并求解其系數(shù)矢量。根據(jù)測量矩陣中的非零元素,可對EMD分解得到的模態(tài)分量中的主要特征進(jìn)行分析。
2.1 稀疏表示
首先利用CS對剩余IMFs分量進(jìn)行稀疏表示,陀螺儀的重構(gòu)信號可表示為:

式中:hi(t)為陀螺儀實際觀測值,s(t)為真實信號,n(t)為高斯白噪聲。設(shè)H為陀螺儀測量信號hi(t)在給定尺度上大小為N×1的稀疏系數(shù)列向量,由CS理論可知,存在增廣測量矩陣ΦM×(N+1),其中測量矩陣為ΦM×N(M≤N),矩陣ΦM×1為陀螺儀誤差補償矩陣,此時存在觀測向量y,使得:

式中:觀測向量y在給定尺度上的大小為M×1的列向量。由于y的維數(shù)遠(yuǎn)低于H的維數(shù),方程難以求解。真實剩余IMFs分量的稀疏系數(shù)H在t上稀疏的。在ΦM×N滿足約束等距的情況下[14],對于常數(shù)δt∈(0,1)有:

式中:‖·‖2表示向量的模值,即l2范數(shù),稀疏系數(shù)可由測量值y求解最優(yōu)范數(shù)。

式中:‖·‖0表示向量l0的范數(shù),即非零元素的個數(shù),測量矩陣ΦM×N選擇高斯矩陣;測量向量y的維數(shù)M滿足M≥Klog(N)。
2.2 貝葉斯重構(gòu)
基于貝葉斯統(tǒng)計原理,通過對剩余IMFs分量的最大后驗點的均值估計來重構(gòu)信號。根據(jù)支持向量機(jī)理論,利用分層的先驗?zāi)P颓蟪鍪S郔MFs分量的均值和方差,從而求得剩余IMFs的真實值。

根據(jù)貝葉斯理論,在求解yi的密度函數(shù)下,采用Laplace概率分布對hi(t)建模如下:
然而,當(dāng)直接采用Laplace密度函數(shù)難以求解hi(t)先驗時,可以用高斯密度函數(shù)精度β(β1,β2,…,βn)分量的乘積表示陀螺儀誤差補償項w(t)的先驗分布:

β服從個Gamma分布且,對得到的后驗分布進(jìn)行參數(shù)β和β0的最大后驗估計,由Bayes定理可得:

通過相關(guān)向量機(jī)模型可得hi(t)均值和方差估計:

式中:Λ=diag(β1,β2,…,βn),代表對角矩陣。通過求解β和β0的最大邊緣分布,可得β和β0的更新表達(dá)式:

式中:μi,j為第j個后驗均值矢量;Σi,(j,j)為Σi對角線上的元素;β和β0的上標(biāo)表示迭代更新的值。通過對式(14)~(17)的聯(lián)合迭代得到陀螺儀信號hi(t)的最大后驗估計。
2.3 誤差補償項估計
根據(jù)增廣矩陣中的誤差補償矩陣ΦM×1,陀螺儀的誤差估計值可表示為:

同理,根據(jù)2.2節(jié),可通過貝葉斯估計求解出陀螺儀誤差補償項w(t)的值。
通過對MEMS陀螺儀信號進(jìn)行EMD分解,利用CMSE算法界限高低頻模態(tài)分量,在剔除高頻噪聲模態(tài)的前提下,對剩余IMFs分量稀疏冗余優(yōu)化,采用貝葉斯估計補償陀螺儀誤差。綜上,基于稀疏表示的EMD對MEMS陀螺儀降噪的算法流程如圖1所示。

圖1 稀疏冗余算法流程
3 實驗分析
3.1 實驗方案
為了檢驗稀疏冗余算法對MEMS陀螺儀的降噪性能,設(shè)計了轉(zhuǎn)臺實驗和實際鉆進(jìn)實驗。首先,在轉(zhuǎn)臺實驗中,設(shè)計了靜態(tài)和動態(tài)兩種狀態(tài),可以驗證陀螺儀在不同狀態(tài)下的去噪效果。然后,通過模擬鉆進(jìn)實驗,優(yōu)化后的陀螺儀數(shù)據(jù)解算出的方位角的顯著改善,證明該算法的有效性。最后,設(shè)置以下三種實驗方案。
方案一:MEMS陀螺儀的原始輸出信號;
方案二:采用EMD算法;
方案三:采用EMD-CS算法。
通過使用均方誤差RMSE和信噪比SNR來比較以上三種方案的降噪效果。RMSE可表示為:

式中:x(t)為陀螺儀真實信號,N為陀螺儀數(shù)據(jù)采集總數(shù),y(t)為降噪后的信號值。
3.2 轉(zhuǎn)臺實驗
本次實驗數(shù)據(jù)是通過設(shè)計的無線藍(lán)牙MIMU系統(tǒng)采集。MIMU系統(tǒng)模塊的陀螺儀參數(shù)為:0.005的噪聲密度,18°/hr的穩(wěn)定性偏差。通過調(diào)制轉(zhuǎn)臺速率收集數(shù)據(jù):①將MIMU系統(tǒng)模塊水平固定在轉(zhuǎn)臺上,如圖2所示;②接通電源進(jìn)行預(yù)熱;③靜置200 s,記錄靜態(tài)下陀螺儀的數(shù)據(jù),之后給轉(zhuǎn)臺使能,使其達(dá)到10°/s的轉(zhuǎn)速,采樣間隔0.02 s,連續(xù)采樣10000點,記錄采集數(shù)據(jù)。

圖2 MIMU轉(zhuǎn)臺實驗
首先對含噪的MEMS陀螺儀數(shù)據(jù)進(jìn)行EMD分解,其分解得到9個模態(tài)分量和1個余項,如圖3所示。通過CMSE計算參數(shù)C的值,當(dāng)C=6時,所得到的兩個重構(gòu)陀螺儀信號間的歐式距離平方最小,因此可將IMF1-IMF5的高頻噪聲模態(tài)分量剔除。通過對剩余IMFs分量進(jìn)行稀疏冗余處理,圖4為對剩余IMFs分量優(yōu)化前后的效果,明顯可以稀疏提取信號特征。

圖3 陀螺儀信號的EMD分解

圖4 剩余IMFs分量稀疏冗余優(yōu)化前后
表1為3種方案的RMSE和SNR的計算結(jié)果,圖5(a)、(b)分別為陀螺儀在靜態(tài)、10°/s轉(zhuǎn)速下的去噪效果,從表1和圖5可以看出,基于EMD的稀疏提取對陀螺儀的降噪有明顯效果,SNR值相對于原始信號及EMD算法分別提高了27.5%、12.6%,RMSE值分別降低了82.9%、61.8%。
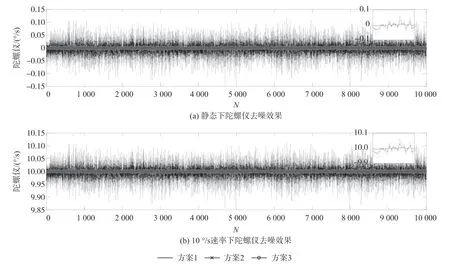
圖5 3種方案對陀螺儀信號降噪后的對比

表1 三種方案的SNR和RMSE比較
為進(jìn)一步的驗證3種方案的降噪效果,設(shè)置轉(zhuǎn)臺轉(zhuǎn)速為100°/s,收集數(shù)據(jù)。對優(yōu)化后的陀螺儀信息進(jìn)行姿態(tài)解算,結(jié)果如圖6所示。陀螺儀在短的時間內(nèi),解算得到的方位角誤差較小,隨著時間的加長,其累計誤差在不斷加大。方案2的累積誤差由0.5852°減小到0.4507°;方案3的方位角累計誤差由0.5852°減小到0.2375°。

圖6 轉(zhuǎn)速100°/s時方位角解算誤差對比
3.3 鉆進(jìn)模擬實驗
為了更好的驗證稀疏冗余算法對MEMS陀螺儀去噪的優(yōu)良性,設(shè)計了模擬鉆進(jìn)實驗,通過將裝有藍(lán)牙功能的MIMU模塊固定在鉆桿根部,如圖7所示。在進(jìn)行鉆進(jìn)前,首先將鉆機(jī)的傾斜角調(diào)整為45°,鉆進(jìn)中,以轉(zhuǎn)速為360°/s恒定鉆壓垂直鉆進(jìn),為了減少隨時間加長漂移誤差較大的影響,每間隔100 s停鉆一次,整個鉆進(jìn)過程每間隔1 s采集陀螺儀數(shù)據(jù);然后以初始傾斜角直行鉆進(jìn),鉆機(jī)在穩(wěn)定時有特定的轉(zhuǎn)速,當(dāng)鉆進(jìn)不同材質(zhì)時,其振動的幅值在變化,模擬鉆進(jìn)的三軸陀螺儀信號及優(yōu)化后的效果如圖9所示。由此可以看出,方案三可以較好的處理振動等因素下的陀螺儀噪聲。

圖7 模擬實鉆實驗
通過對模擬鉆進(jìn)的陀螺儀數(shù)據(jù)進(jìn)行方位角解算,結(jié)果如圖8所示。在基于EMD處理下,累積誤差由11.8562°減小到0.5637°。而基于EMD稀疏冗余的優(yōu)化下,方位角累計誤差由11.8562°減小到0.4725°。

圖8 模擬鉆進(jìn)的方位角解算誤差對比
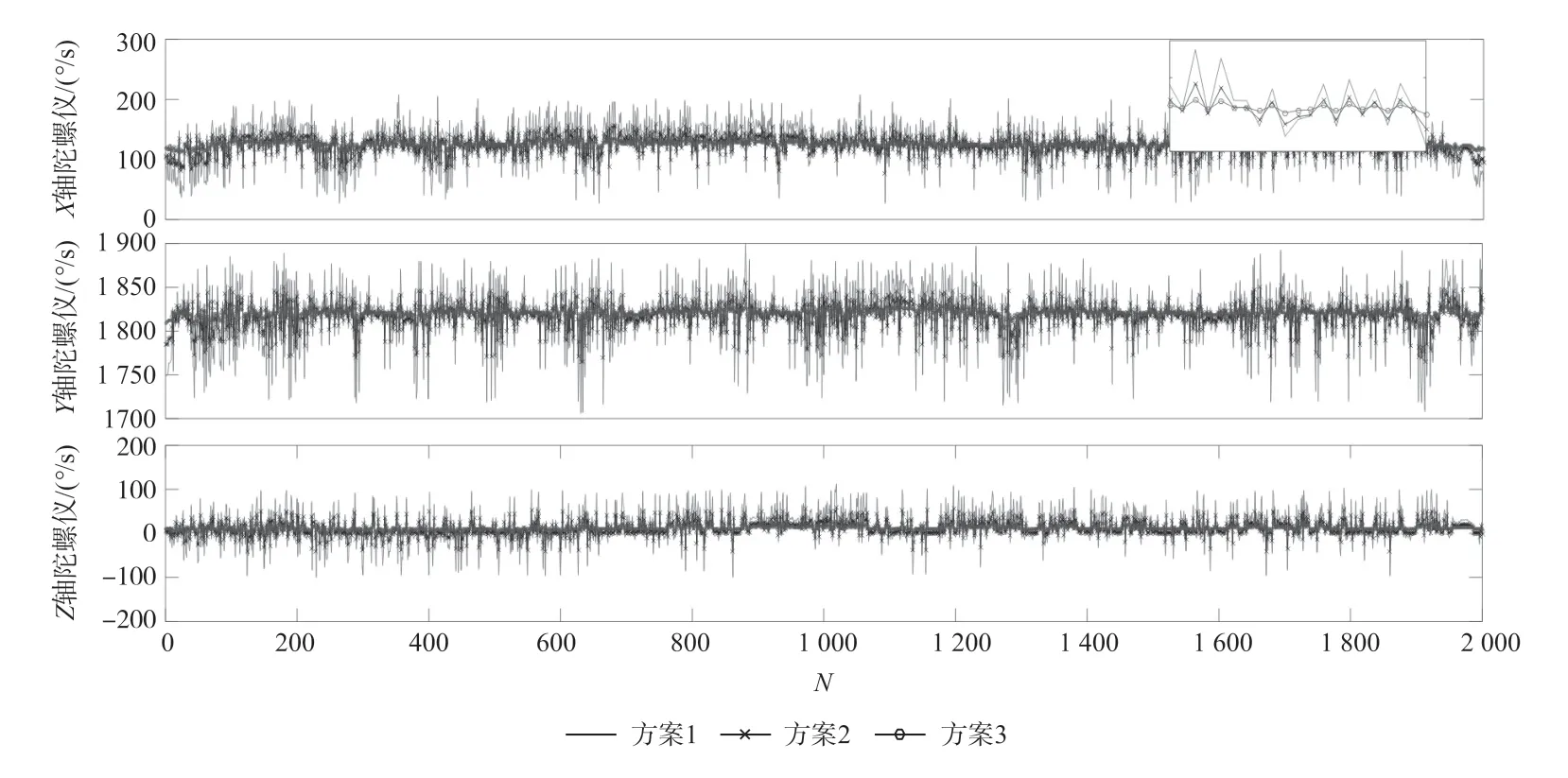
圖9 不同方案對鉆進(jìn)實驗下三軸陀螺儀信號的處理
4 結(jié)論
通過對含噪MEMS陀螺儀信號的分析,利用EMD算法的自適應(yīng)性及連續(xù)均方誤差對高低頻模態(tài)分量的識別,有效去除高頻噪聲模態(tài)分量的影響。構(gòu)建冗余字典,使剩余IMFs分量在該字典上稀疏優(yōu)化。同時,增添誤差補償列使構(gòu)成新的增廣矩陣,利用貝葉斯估計補償項。通過轉(zhuǎn)臺和模擬鉆進(jìn)實驗,證明陀螺儀信號在基于EMD的稀疏表示下要優(yōu)于EMD算法;對優(yōu)化后的陀螺儀信息進(jìn)行姿態(tài)解算,其方位角的累積誤差由11.8562°減小到0.4725°,進(jìn)一步驗證了該方法可以有效提高M(jìn)EMS陀螺儀的測量精度。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
廣西科技大學(xué)學(xué)報(2016年1期)2016-06-22 13:10:37
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
湖北經(jīng)濟(jì)學(xué)院學(xué)報·人文社科版(2015年8期)2015-12-29 05:53:07
海軍航空大學(xué)學(xué)報(2015年3期)2015-11-11 17:20:00
航空學(xué)報(2015年4期)2015-05-07 06:43:35
上海電機(jī)學(xué)院學(xué)報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39