飛行器水載荷結構完整性數值模擬現狀與展望-Part I:水上迫降和水上漂浮
2021-06-16 00:53:08童明波陳吉昌李樂肖天航古彪董登科汪正中
航空學報 2021年5期
童明波,陳吉昌,李樂,肖天航,古彪,董登科,汪正中
1.南京航空航天大學 航空學院,南京 210016
2.中國特種飛行器研究所,荊門 448035
3.中國飛機強度研究所,西安 710065
4.中國直升機設計研究所,景德鎮 333001
隨著經濟和科技的飛速發展,近些年來,中國的航空航天領域呈現了百花齊放式的繁榮景象。作為現代工業之花,航空航天在帶動中國社會發展方面發揮了至關重要的引擎作用,以直升機、大型水陸兩棲飛機、軍民用運輸機、運載火箭、空間站和探月艙為代表的各類飛行器不斷應用在國防、商用和空間探索等領域,同時也帶來了飛行器面對復雜水載荷情況下的安全性和結構完整性分析問題,主要涵蓋了飛行器水上迫降/著水、水上漂浮、貯箱晃動和滅火飛行器投汲水4個方面的工程應用。
在飛機設計階段,水上迫降的研究一直是學術界和工程師的重點關注問題。飛行器在水上迫降時由于水動載荷較大,造成機翼和發動機等部件脫落,以及機身底部結構損壞,從而破壞飛行器的結構完整性,進而可能嚴重影響飛行器的漂浮時間,導致乘客的生命安全受到威脅。在人類民航史上已經發生了多次震驚世界的墜毀事故,數據表明,自1938年以來,一共發生了219起水上迫降災難[1]。Lindenau和Rung[2]統計了1963—2009年的重大民航客機水上迫降事故,從事故原因、數據分析和對迫降有重大影響的因素等方面進行了重點闡述,指出在建立迫降模型時需要考慮的因素有:由于高速前飛導致的水動力沖擊問題、機體結構變形的流固耦合問題以及發動機和襟翼等結構部件脫落的影響。慘重的民航客機水上墜毀事故[3-6]警示設計師需要進一步加強對不可控因素導致飛行器復雜水面情況水上迫降的安全性和結構完整性分析。
由于中國國土廣袤、海洋活動頻繁、各類火災頻發,如:1987年大興安嶺特大火災、2019年和2020年2次涼山特大火災和近海事故等慘重災難對人民生命和財產造成了巨大損失,其中2次涼山火災共造成50余名撲火英雄壯烈犧牲,暴露出了中國空中救援滅火力量的不足,因此中國急需能夠快速反應的大型滅火水陸兩棲飛機。作為航空應急救援體系中至關重要的飛行裝備,大型滅火水陸兩棲飛機能夠滿足中國森林滅火和海洋救援的迫切需要[7]。由于其獨特的結構形式和任務需求,水陸兩棲飛機需要承受水面起降、滑行、水箱晃動和投汲水等復雜的水載荷,以及水箱晃動和投汲水對飛機重心的影響[8],由此對機體水動載荷的結構完整性分析提出了新的挑戰和課題。
21世紀以來,人類對海洋的認知和重視程度不斷提升,全球海洋資源的開發和海洋權益的競爭日趨激烈,海上飛行活動日益頻繁。美國海軍航空發展中心(NADC)對1972—1981年發生的184起海軍直升機事故和71起固定翼飛機事故進行了統計[9],重點分析了水上迫降時機體的結構響應,總結出了6個造成人員傷亡的原因,其中之一就是機身結構破損對乘員的二次沖擊傷害。之后,美國交通運輸安全委員會(NTSB)對1982—1989年的民用和海軍直升機迫降和入水墜撞事故進行了調查[10],結果表明直升機的結構和對應的分析方法需要進一步提高。Hughes和Campbell[11]對1982—2006年美國和歐洲的直升機事故進行了綜述,他們指出在提升機體結構強度和漂浮時間等方面還需要付出更多的努力。英國民航當局(CAA)對1993—2001年直升機水上事故進行了詳細的分析和總結[12],指出直升機設計和分析時應考慮海浪等級,尤其是不規則波對結構完整性和漂浮穩定性的影響。Taber和Mccabe[13]對1971—2005發生的511起直升機水上迫降事故的調查結果表明,直升機的翻轉和沉沒是影響乘員存活率的主要原因。Brooks等[14-15]對1979—2006年發生在加拿大和1981—2011年發生在美國的直升機水面墜機事故進行了詳細的調查和分析,其死亡率分別為23%和26%,事故的主要原因是缺少預警、直升機極速下沉和翻轉。因此,從設計和分析的角度而言,直升機海上迫降、漂浮性能的研究及其結構完整性分析對于乘客的安全具有至關重要的影響。
目前,針對飛行器結構水載荷的研究主要有:試驗、理論方法和數值計算。其中,試驗存在耗時長、成本昂貴等缺點,理論方法則有幾何模型非常簡化、計算結果不準確等問題。Qu[1]和Seddon[16]等對1929—2003年的入水沖擊理論方法和1940—1975年美國NASA蘭利研究中心主導的飛行器入水試驗進行了系統的梳理,并指出了理論和試驗的優缺點,如:理論方法不能預測隨時間變化的結果,試驗在測量局部壓力和速度等細節方面存在較大困難等問題。Hughes 和Campbell[11]在Seddon的基礎上對入水沖擊問題進行了綜述,總結了1982—2006年的理論、試驗和數值計算的成就,介紹了自20世紀90年代以來歐盟資助的全尺寸機體入水沖擊和墜撞項目的發展,如:“Crashworthiness for Commercial Aircraft”、HELISAFE、CAST和CRAHVI等項目。2004年,在歐盟的SMAES項目的支持下,英國的海角工程公司對美國海岸警衛隊服役的CN235-300M螺旋槳飛機進行了1∶8縮比的水上迫降試驗[17]。2014—2017年,在歐盟SARAH項目的支持下,意大利船模試驗中心聯合德宇航(DLR)對高速平板著水進行了多次試驗[18-19],測量了剛體和柔性體平板的著水特性。2019年Seiler等[20-22]公開了SARAH水上迫降項目的最新進展,從結構吸收迫降沖擊載荷、改變機體構型、降低乘客風險、增加結構完整和安全性等角度分析了民機和直升機的迫降特性。
從結構沖擊(Impacting)的角度,飛行器水上迫降(Ditching)的結構響應特性和分析方法可以參考飛行器墜撞(Crashworthiness)的相關研究成果。如:Yang等[23]梳理了過去50年直升機地面墜撞時結構設計和吸能的研究成果,詳細總結了飛行器墜撞的發展歷史、典型吸能的結構形式和結構部件對墜撞的影響等,并指出了直升機墜撞分析的準則和未來的發展方向;Mou等[24]綜述了民機機身結構墜撞的研究現狀和發展方向,重點闡述了積木式分析策略(Building Block Approach)以及撞擊試驗和數值模擬的設計和驗證方法,并指出有限元模擬是飛行器結構撞擊研究不可缺少的工具。
另一方面,從結構物與液體撞擊的角度分析,飛行器水上迫降的過程與船舶砰擊(Slamming)涉及的物理現象和力學特性比較類似,因此飛行器水載荷分析可以借鑒船舶砰擊領域的相關試驗、理論和數值模擬等研究成果,如:Dias和Ghidaglia[25]重點探討了砰擊問題的試驗、理論和CFD求解方法,總結指出目前的縮比試驗存在縮比效應,難以充分完全的揭示砰擊的物理特性,而數值計算仿真在這方面具有突出的優勢。
在直升機水上迫降和漂浮的試驗研究領域,美國于1979年對貝爾22進行了縮比模型試驗[26],重點研究漂浮穩定性,隨后美國海軍對1975—1981年64起CH-46直升機海上迫降的事故進行了總結[27],并進行了全尺寸和1:8縮比模型試驗,分析和研究了不同漂浮氣囊數量和分布位置對沖擊和漂浮穩定性的影響。英國在1987年對EH101機型進行了縮比試驗[28];歐洲航空安全局(EASA)于2007年公布了AS355和EC225兩款直升機的水上迫降和漂浮的試驗和分析的總結報告[29]。中國在這方面的試驗研究最早起步于1982年[30],第一次對直8進行了初步的入水沖擊試驗;2005年完成了“神舟”四號載人飛船返回艙的海上漂浮試驗,驗證了該返回艙海上漂浮性能和生存能力[31];2008年對某型直升機進行了縮比模型試驗[32],重點研究了氣囊在著水沖擊過程中的力學特性,并得到了氣囊的沖擊載荷與迫降速度和氣囊壓力正相關的結論;2009年,“神舟”八號載人飛船在煙臺進行了長時間持續性的海上漂浮試驗,驗證飛船設計和改進的可靠性[31];2016年對AC313直升機進行了水上迫降和漂浮試驗[33]。
漂浮穩定性的理論分析方法最早起源于船舶行業,主要有[34]:切片法[35-36]、線性系統運動預報方法[37]、基于不沉性理論[38]的簡化方法(也稱為準靜態方法)。近些年來,這些方法在研究飛行器的完整浮態時應用較廣,但是由于其幾何外形簡化、液體自由表面線性假設和無粘勢流假設等問題,在預報復雜外形的飛行器水上漂浮的破艙穩性和動態平衡特性時存在幾何外形難以模擬和結果準確度不高等缺點。
隨著計算機科學的發展,數值計算由于其成本低、速度快、結果相對準確和應用范圍廣等突出的優點已經開始取代了傳統試驗和理論方法,逐步成為了工程師和分析人員的主要研究手段。因此本文從數值計算方法的角度出發,針對飛行器水載荷的結構完整性分析問題,對水上迫降和水上漂浮進行總結。本文Part I的主要內容為:
1)對飛行器水上迫降和水上漂浮領域的事故、試驗和理論方法進行調研,強調飛行器面臨復雜水面情況的結構完整性分析的重要性和迫切需求。
2)系統總結適用于飛行器水載荷分析的兩相流界面數值模擬方法和流固耦合算法,闡述各種算法的實現過程、分類和發展歷史,并分析不同算法的優缺點。
3)針對水上迫降和水上漂浮問題,分析工程上的關注點和難點,調研國內外研究現狀,展望未來的發展趨勢。
1 飛行器水載荷數值模擬方法
目前在飛行器水載荷數值分析領域常用的數值離散方法有:有限差分法(FDM)、有限體積法(FVM)、有限元法(FEM)等,流體運動描述的方法有歐拉(Euler)、拉格朗日(Lagrangian)、任意拉格朗日(ALE)等。圖1歸納了目前適用于飛行器水載荷計算的算法和軟件平臺,其中,FVM、SPH、ALE和FEM方法在飛行器水載荷的研究中應用最為廣泛,FVM方法在氣動力和水動力研究問題上具有計算精度高的優勢,因此在飛行器水載荷的各類工程問題和機理研究中的重視度日益提高;SPH、ALE和FEM方法在水動力和水固耦合方面具有適應能力強、計算簡單和高效等優點,在飛行器設計和水載荷性能評估階段得到了廣泛應用。
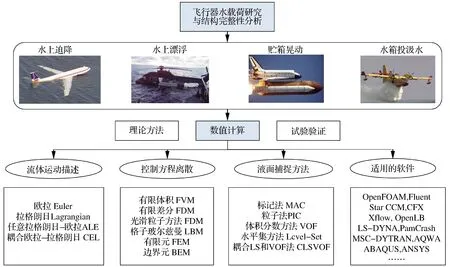
圖1 飛行器水載荷數值模擬方法和軟件的總結
針對水上迫降、水上漂浮、貯箱晃動和投汲水等實際工程問題,兩相流界面模擬方法和流固耦合算法對飛行器水載荷數值模擬影響最大,因此,本節對這2種算法的分類、發展和計算流程進行總結。
1.1 兩相流界面數值模擬算法
氣液兩相流界面(Two-phase interface)的數值模擬是當今計算流體力學領域的重要研究課題,開展界面捕捉算法的研究和調研對飛行器水載荷的研究具有重要的理論意義和實用價值。
根據描述界面位置是否需要網格可以分為:動網格、無網格和固定網格方法。前者的運動界面由隨時間變化的網格來表示[39],其算法復雜度較高,且當界面發生較大變形時需要網格重構,因此沒有被廣泛應用。無網格方法,如光滑粒子方法(Smoothed Particle Hydrodynamics, SPH)[40],能很清晰準確地保證自由液面的追蹤,免去了網格生成和網格重構的問題,在應用于水動力的研究時具有較大的優勢,但是在水氣兩相流方面仍然存在模型不完善、粒子數需求量大、計算成本高和高速問題的氣動力計算不準確等問題。
基于固定網格的兩相流界面模擬方法可以分為界面追蹤法(Front-tracking method)和界面捕捉法(Interface-capture method),其中界面追蹤[41]使用拉格朗日網格追蹤界面,流場域網格固定,可以實現高精度的結果,但是存在數值計算不穩定和計算成本高的缺點;另一種方法為界面捕捉,其主要思想為利用相函數或者距離函數來區分不同的流體介質,與界面追蹤方法相比,這種方法的實現更簡單、易于編程和并行計算,且能提供比較精確的結果,因此已經廣泛應用于航空航天、船舶和機械等領域。目前,界面捕捉方法主要有體積分數方法(Volume of Fluid, VOF)、水平集方法(Level Set, LS)、VOSET方法以及耦合VOF和LS方法(Coupled Level Set and VOF, CLSVOF)等。
VOF方法最早由美國Los Alamos國家實驗室的Hirt和Nichols[42]于1981年提出,主要思想為采用一個體積分數函數F(Volume of Fraction Function)表示流體網格中的相(如圖2所示),如果F=0,則為第一相流體;如果F=1,則為第二相流體,兩相界面位于0和1之間的網格,從而能有效保證界面處流體質量守恒的特性。

圖2 VOF方法示意圖
VOF方法的主要求解流程(如圖3所示,虛線為界面切線,n為界面法向)為:① 初始化體積分數;② 計算界面的位置和法向;③ 計算體積分數的對流通量;④ 時間推進體積分數的對流控制方程,得到下一個時間步流體體積分數的分布。其中,界面位置和法向對計算的結果影響最大,不合理的計算方法可能會導致界面附近出現不符合物理常識的虛假流動,因此各國學者對VOF的研究主要集中在此方面。
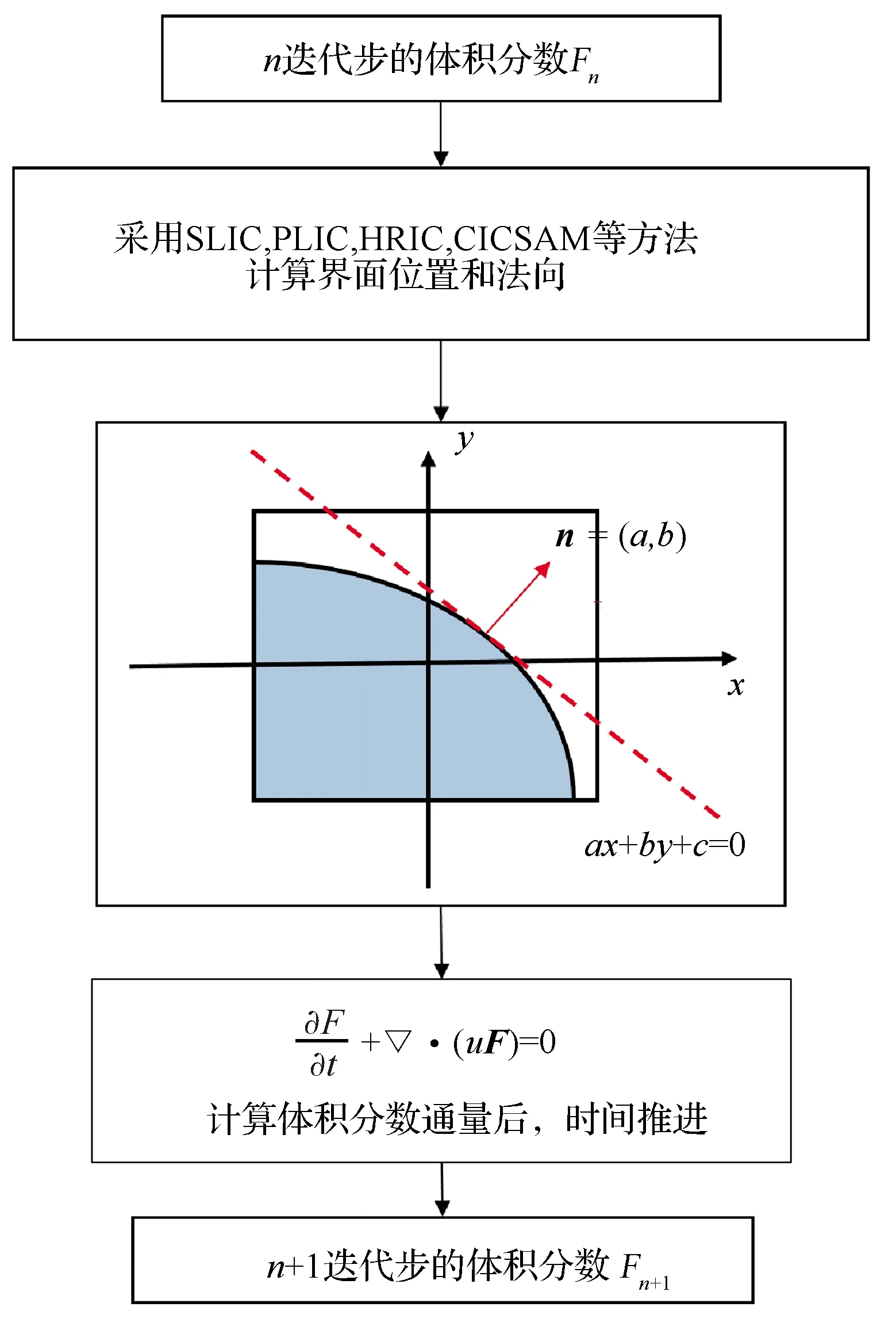
圖3 VOF方法求解流程示意圖
如圖4所示,目前主要有2種計算界面位置和法向的離散格式:幾何重構格式和空間代數離散格式。常用的幾何重構格式有:簡單線性界面方法(SLIC)[43]、Y-VOF方法[44]、多段線界面計算方法(PLIC)[45]、基于樣條線的界面重構技術(EMFPA-SIR)[46]、最小二乘VOF界面重構算法(LVIRA)[47]、高效最小二乘VOF界面重構算法(ELVIRA)[48]、最小二乘擬合算法(LSF)[49]。空間代數離散格式有:任意網格可壓縮界面格式(CICSAM)[50]和HRIC格式[51]。比較而言,幾何重構格式可以實現界面的精準表示,但是算法復雜,且需要耗費較多的計算資源;而空間代數離散格式在近似界面時計算耗時更短,但其精度比幾何重構格式低。目前,VOF算法的發展主要集中在提高界面捕捉精度、減少虛假流動和適應多種應用場景等方面,在工業界應用最廣泛的VOF界面計算方法為PLIC和HRIC格式。
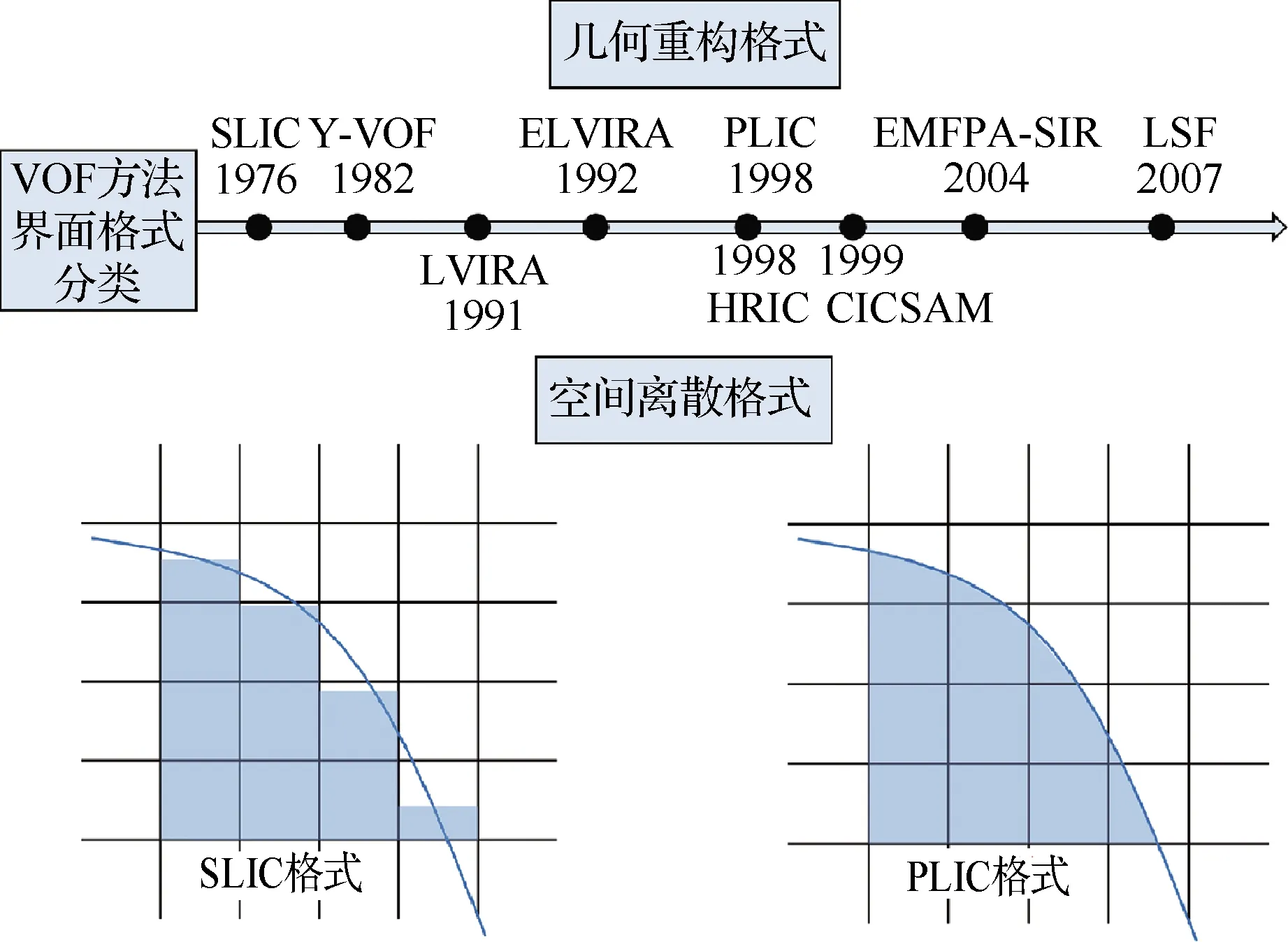
圖4 VOF方法的界面格式總結
針對VOF方法中自由液面構造復雜的缺點,Osher和Sethian[52]于1988年提出了Level Set(LS)方法,用于計算與曲率相關的速度界面傳播問題。隨后,Sussman等[53]于1994年首次將LS方法應用于多相流動問題的模擬。如圖5所示,水平集域φ被定義為帶符號的距離函數(Signed Distance Function),用于區分數值域中的2種流體,零等值面決定界面的位置,物理性質則根據φ函數進行計算,因此距離函數具有光滑連續可導的特性,從而使得LS方法在計算界面位置、曲率和法線方面具有突出的優勢。

圖5 Level Set方法示意圖
圖6為LS方法的主要求解流程:① 初始化距離函數;② 計算界面位置、法向和曲率;③ 計算LS對流通量;④ 時間推進LS對流控制方程;⑤ 修 正和重新初始化距離函數。其中,LS對流方程的解并不保留φ函數的距離特性,從而導致界面附近的物理量分布不連續,即質量不守恒的問題,所以需要在每個時間步之后修正和重新初始化。因此,學者對LS方法的改進主要集中在3個方面:采用高階離散格式、改進距離函數重新初始化的過程和耦合其他守恒方法。
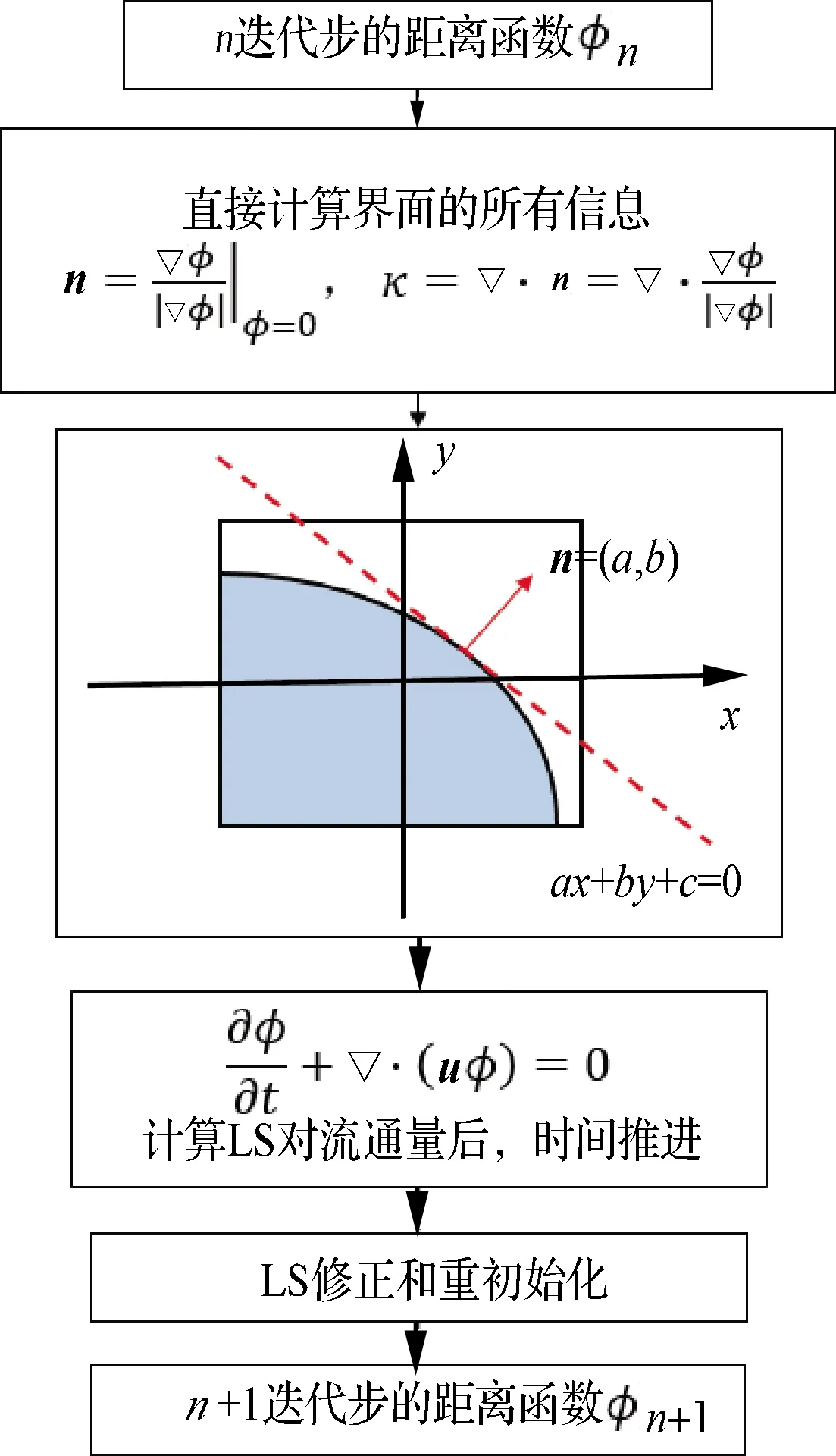
圖6 Level Set方法求解流程示意圖
研究表明,對流項使用高階格式可以緩解數值耗散導致的質量守恒問題,如Shu和Osher[54]采用了TVD和ENO格式,Liu等[55]使用了WENO格式,Sussman等[56]給出了三階ENO格式應用在LS方法中的實例,并與自適應投影方法相結合,以較低的計算成本實現了較高的界面捕捉精度。但是,對于可壓縮流動問題,高階的離散格式不能完全解決質量守恒問題[57]。為此,很多學者從改進重新初始化方程的角度進一步發展了LS方法,如,Olsson等[58-59]通過使用正則特征函數(Heaviside Function)來修正重初始化過程,一般稱之為“守恒LS方法”,目前應用最為廣泛;另一方面,Herrmann[60-61]基于誤差隨網格細化而成比例減小的事實,提出了RLSG方法,即對界面附近的網格細化并采用WENO格式進行離散,一定程度上緩解了質量守恒問題。
為了提高LS方法的質量守恒性,研究者基于將LS方法與其他質量守恒方法相結合的思路,發展了3種方法:PLS方法、HLSVC方法和CLSVOF方法。PLS方法[62-63]結合了歐拉描述的LS方法和拉格朗日粒子追蹤方法的優點,既保證了質量守恒和界面的準確捕捉,又不需要高階離散格式。HLSVC方法[64]保留了LS方法中界面光滑可導的特性,并與動態自適應網格結合,能夠有效地解決質量守恒問題。CLSVOF方法作為LS方法與質量守恒方法的代表,由Sussman[65]首次提出,此方法的核心思想為:① 采用LS方法的符號距離函數計算界面法向和曲率以保證界面的精度;② 采用VOF的體積分數對流方程實現質量守恒。總的來說,以上3種耦合方法均能解決LS方法的質量守恒問題,但是與單獨的VOF和LS方法相比,耦合方法更加復雜、編程難度更大、計算成本更高,所以實際復雜工程問題上應用較少。
1.2 流固耦合算法
流固耦合(Fluid-Structure Interaction, FSI)通常用于求解黏性流體與彈性結構體之間的多物理場耦合問題,在飛機迫降、墜撞和貯箱晃動等飛行器水載荷結構完整性分析領域發揮著重要作用。然而,由于這些問題具有很強的非線性和多學科特性,對其進行理論和試驗研究比較困難[66]。
近年來,隨著計算機算力的飛速提升,使得數值模擬流固耦合問題,尤其是耦合較為緊密的問題成為了可能。過去很多由于計算條件的限制采用單向耦合或者通過昂貴試驗解決的問題,如今已經逐漸被更為精確和經濟的雙向耦合替代。圖7 和表1為目前商業軟件的流固耦合算法總結和3種流固耦合算法的優缺點。
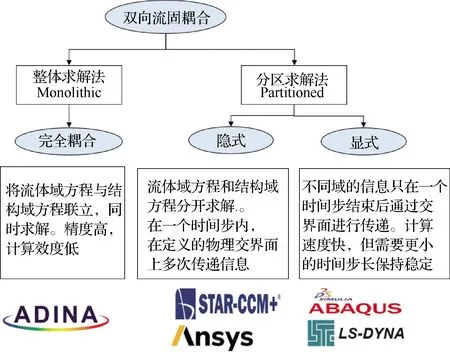
圖7 商業軟件集成的流固耦合算法
流固耦合數值模擬按照耦合程度從緊到松[66-68]進行分類:單向耦合和雙向耦合。當結構變形很小且對于流體載荷大小的影響可以忽略時,單向耦合的方法即可滿足分析要求,即把固體假設成剛體,把流體載荷以時歷過載的形式施加到結構上;當結構變形較大,且其變形顯著影響流場分布時,則采用雙向耦合進行數值模擬。
在雙向耦合過程中,結構域的變形反饋給流體域求解器,并對網格進行重構,進而更新流體施加在結構上的載荷。根據結構域與流體域耦合的緊密程度,雙向耦合可以分為“松散耦合”和“緊密耦合”。松散耦合指結構變形在流體載荷作用下趨于收斂,或者結構域對于流體域擾動的響應較慢的情形(反之亦然);緊密耦合一般應用在結構域與流體域緊密聯系的問題,一方的微小擾動就會使得另一方的響應產生顯著變化,對方的變化同時又會對己方的擾動產生明顯的響應。表1總結了單向和雙向耦合的應用場景及其優缺點。在物理域信息交換形式上,耦合算法根據是否需要界面交換信息可以分為:完全耦合和分區耦合,其中分區耦合主要有:隱式迭代耦合和顯式耦合,圖8 所示為流固耦合算法分類和應用場景的總結。
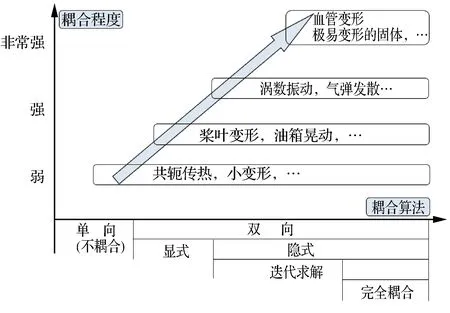
圖8 流固耦合算法分類和應用場景
完全耦合也稱為整體求解法(Monolithic Approach),其求解思路為:流體和固體的方程組同時被求解,且2個物理域在時間和空間上以相同的方式進行數值離散,所以不需要在流體域和固體域的界面進行信息交互。此求解方式對于流固耦合現象非常強烈的問題具有較高的實用性[69]。然而,由于一體化求解的嚴格要求,導致完全耦合的計算效率遠低于分區耦合,對于不同物理場景的適應性較低[70],目前僅有ADINA軟件支持完全耦合。與完全耦合相比,分區耦合(Partitioned approach)最主要的特點為:流體域和固體變形分開求解,流體與固體的相互作用通過流固界面進行交互,保證流固界面的位移和變形在流體方程和固體方程中保持一致,從而得到符合真實情況的物理解。圖9所示為完全耦合和分區耦合分類和求解過程示意圖,圖中Sf為流體求解器,Ss為固體求解器。
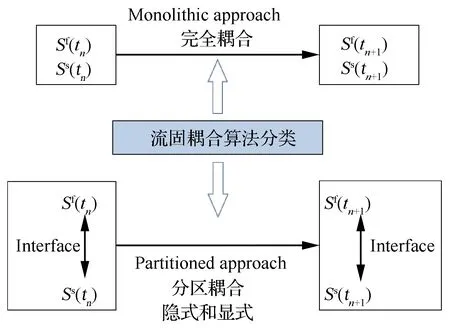
圖9 整體法和分區法求解示意圖
作為分區耦合的其中之一,隱式迭代耦合在求解的過程中需要采用迭代算法使得流固界面的力與位移達到平衡,即:在一個時間步內進行多次子迭代,最后使得流體流動和結構變形達到給定的收斂準則,如流固界面的位移和壓力達到收斂判據。最常見的迭代算法有不動點法(也稱塊高斯-塞達爾法,Block-Gauss-Seidel Method)、牛頓-克利羅夫界面法(The interface Newton-Krylow Method)和準牛頓迭代法(Quasi-Newton Method)。研究表明[71],不動點法在動態松弛的條件下,能夠簡單高效地實現分區流固耦合域之間的數據傳遞。圖10展示了不動點法在流體域與結構域進行子迭代的過程,其中,n為時間步,m為子迭代的總次數,F表示流體域,S表示結構域,P為壓力,X為位移,U為速度。隱式迭代耦合的方法現階段應用比較普遍,出現了很多比較成熟的軟件平臺,如:ANSYS基于Workbench平臺的System Coupling、STAR CCM+與Abaqus聯合仿真等。
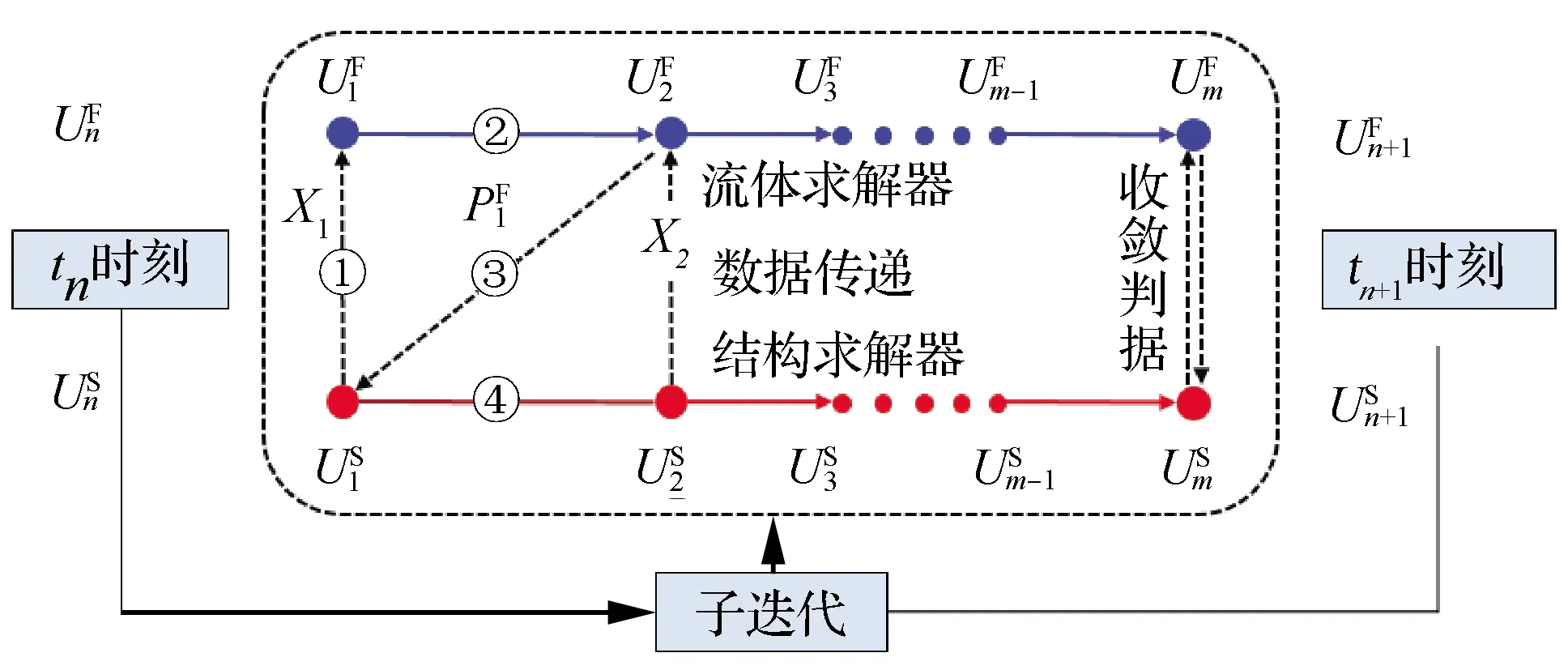
圖10 隱式不動點子迭代求解流程
與隱式耦合相比,顯式耦合的求解策略基本類似,最主要的區別為:顯式耦合不需要子迭代過程,直接進行時間推進,即:流體與固體只在顯式時間步內進行交互[72]。如圖11所示,顯式耦合只在時間步內進行物理量的交換,流體域和固體域內的計算誤差可能會在傳遞過程中累積,與隱式耦合相比,顯式耦合需要更小的時間步長來保持計算的穩定,且計算結果的精度較低,但也有算法簡單和計算成本較低的優點,因此,該方法主要適用于耦合程度較為松散的情況[73]。由于顯式與隱式耦合求解策略比較類似,所以目前能實現隱式耦合的軟件平臺一般也支持顯式耦合。
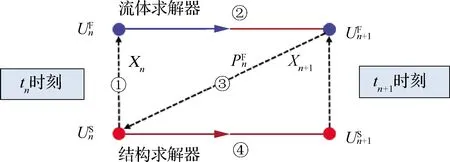
圖11 顯式耦合求解流程
總結而言,從單向耦合、顯式耦合、隱式耦合到完全耦合,數值模擬的精度逐漸提高,計算效率逐漸降低。其中,單向耦合作為最簡單的流固耦合實現策略,其應用場景比較局限,一般不推薦使用。顯式耦合一個時間步內只進行一次界面信息交互,在處理耦合度不強的問題時具有較大的計算效率的優勢,但是存在精度較低的缺點。隱式迭代雙向耦合算法在一個時間步內進行多次內迭代,從而保證每個時間步內流體域與結構域物理量的平衡,可以在滿足計算精度要求的前提下最大限度地提高計算效率和收斂性,是目前學術界和工業界最常用的流固耦合算法,同時在可預見的未來也將占據主導地位。因此,根據分析需求的不同,在研究飛行器水上迫降、墜撞以及貯箱晃動的結構完整性時可以考慮采用隱式和顯式耦合算法。完全耦合將流體域和結構域的方程統一求解,存在每一個時間步的計算成本高昂和收斂速度慢的問題,所以該方法雖然具有最高的精度,但將其大規模應用在飛行器水載荷結構完整性分析問題上還有待技術的進一步突破。
2 水上迫降數值模擬應用與展望
飛行器水上迫降(Ditching)一般指飛行器受控情況下的水上緊急降落過程,包含有民機、直升機、航天飛機、返回艙等飛行器。由于水上飛機著水(Landing)的物理過程和力學特性與水上迫降比較相似,因此,本文將著水歸類為水上迫降的一種特殊情況。調查結果表明,造成水上迫降的事故原因主要有:人為因素、燃油耗盡、發動機故障、機體損壞和惡劣天氣等。水上迫降性能的研究一直是各國民航當局的重點關注課題,美國和歐洲對此進行了大量研究,其研究結果對波音和空客飛機的設計提供了重要參考,如美國聯邦航空局、英國民航局和歐洲聯合適航條例規定[74]:大型運輸機必須通過模型試驗、借助類似布局飛機的迫降性能進行類比外推等工程統計方法來驗證水上迫降特性;中國民航適航條例CCAR-29部[75]對水上迫降的結構要求、試驗施行方案和設備做出了明確注明和嚴格規定。
根據飛機是否受控進行分類,飛機水上迫降分為[76]:有計劃降落和無計劃降落。有計劃降落指飛機在飛行員人為控制的情況下,以合理穩定的姿態降落水面,從而最大程度保證機體結構完整性和乘客安全性。無計劃水上迫降指在發生突發情況下,飛行器不受飛行員控制,以不利于減小沖擊載荷的狀態降落水面。由于無計劃水上降落存在多種不確定性,因此,目前各國學者的研究重點主要為有計劃水上迫降問題。
有計劃水上迫降主要分為4個階段[77]:進近、撞擊、滑行和漂浮。如圖12所示[2]:① 進近階段指飛機從開始下降到機身與水面接觸之前的過程,此時飛行員通過調整姿態角、減小飛行速度、拋擲燃油以減少飛機重量、收起起落架、關閉通風口等手段,為后續入水撞擊過程做準備,此階段飛機受力為氣動力、重力以及地面效應(Wing-In-Ground effect,WIG)對氣動力的影響;② 撞擊階段指飛機觸水沖擊的過程,此時飛機的氣動力和水動力載荷相互耦合,使得飛機姿態迅速變化、過載急劇增大,導致乘員不適、飛機姿態失穩、機身破損、機翼斷裂和發動機著火等嚴重的后果:③ 減 速滑行過程指飛機經歷水面撞擊之后在水面滑行的過程,此時飛機速度和運動姿態主要由水動力決定,飛機可能出現機頭入水下潛、跳躍和海豚運動等情況;④ 漂浮階段是飛機在水面減速滑行停止后漂浮在水面上的過程,作為水上降落的最終過程,此時飛機的重力與浮力平衡,其漂浮特性主要由機體形狀、重量和風浪等因素決定。
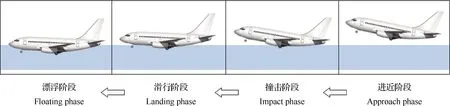
圖12 飛行器水上迫降過程[2]
在上述4個階段中,撞擊階段是飛機所受載荷最嚴重,最容易發生事故的階段,其力學特性主要由氣液固三相耦合決定。與地面墜撞相比,水面撞擊時機體的結構載荷特性受到自由液面變形的影響,使得機腹的結構受力和吸能特性有所不同[78](如圖13所示),因此,在研究水面撞擊特性時不能完全參照地面墜撞的研究成果。
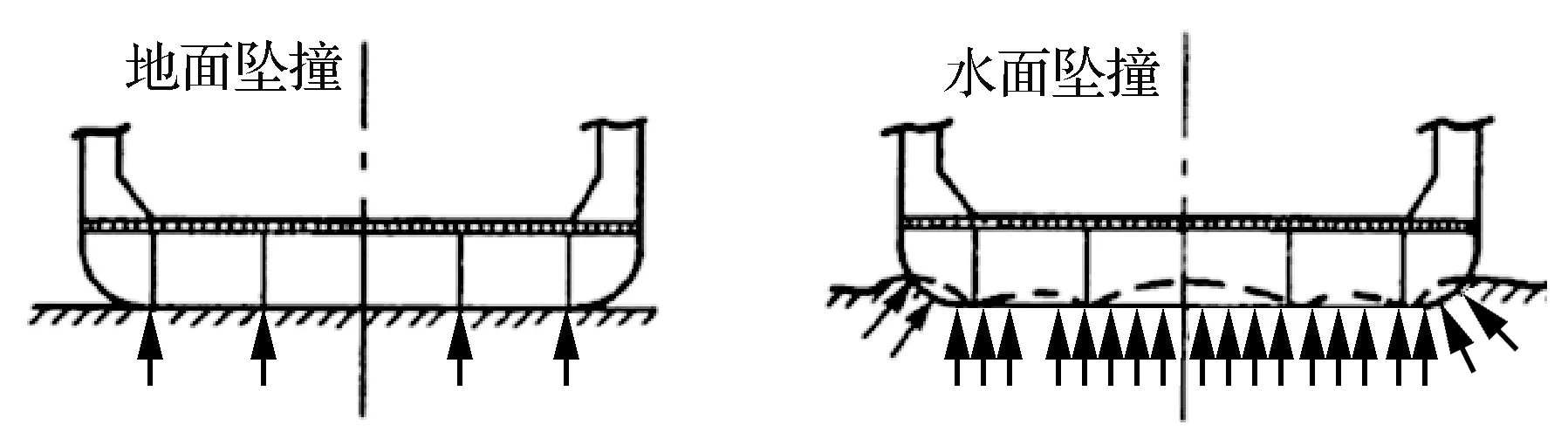
圖13 飛行器地面墜撞和水面撞擊受力示意圖[78]
圖14為飛行器水上迫降過程中水面撞擊階段的受力分析示意圖,圖中ρ為水的密度,g為重力加速度,h為深度,包括氣動力、氣動力矩、水動力、靜水壓力和水氣混合效應。其中,水氣混合效應在墜撞研究中一般并不考慮,但是對于有前飛速度的水上迫降來說,這種效應對于迫降性能的分析結果影響較大,尤其是負壓會顯著改變機體的姿態,因此,有必要總結這種效應的形成機理。
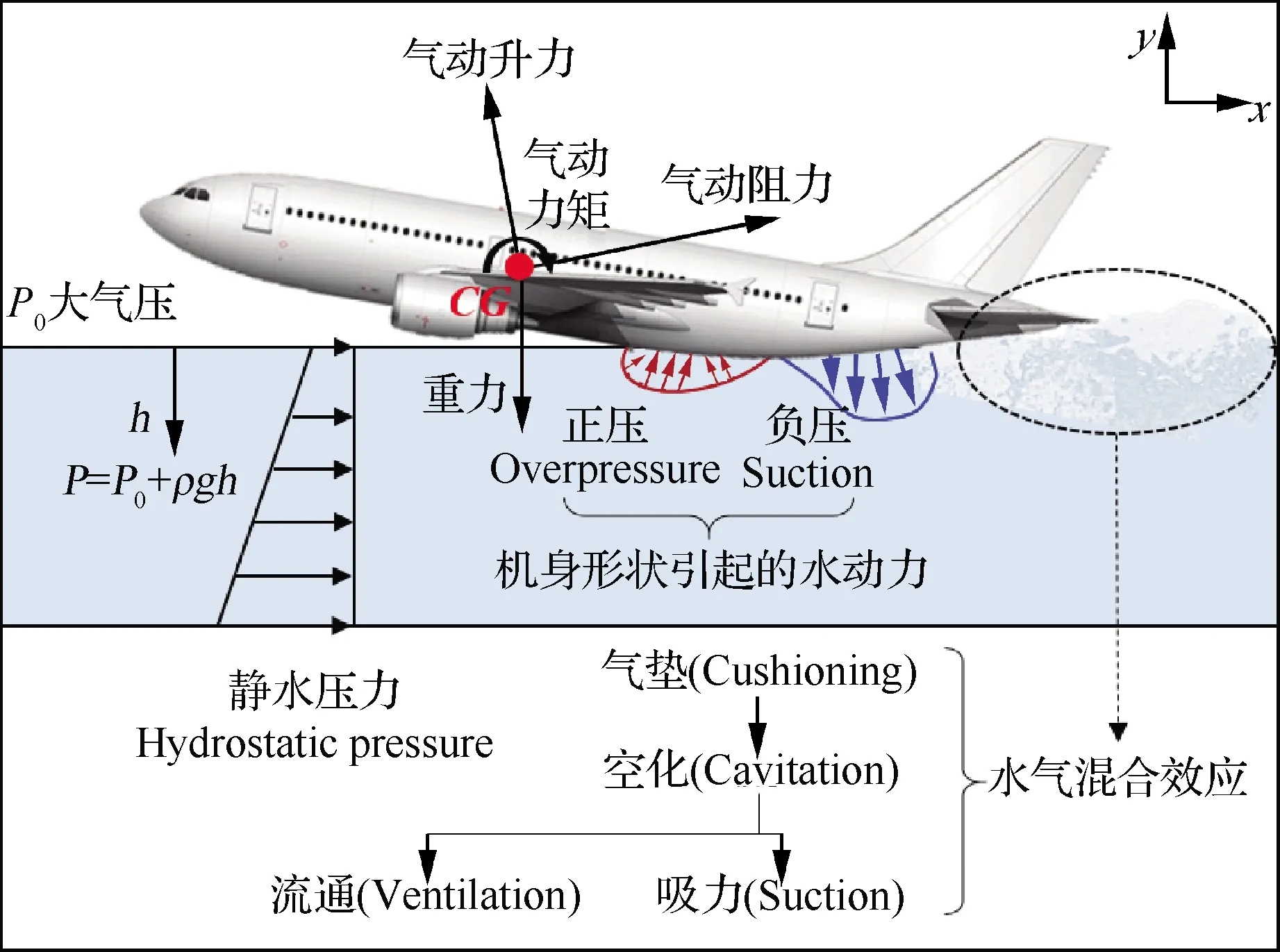
圖14 飛行器水上撞擊階段受力示意圖[77]
水氣效應(Air-water Mixture Effect)主要體現在氣墊、空化、吸力和流通4個效應,其形成過程為:① 機身接觸水面后,部分空氣在水面和后機身之間形成氣墊(Cushioning),從而導致液面形狀不規則變化,影響機身表面的壓力分布和時歷變化趨勢[79];② 隨著機身進一步撞擊水面,氣墊受壓縮后坍塌,產生大量氣泡并可能導致空化效應(Cavitation)[80],此時空氣與水劇烈摻混,氣泡潰滅時的沖擊波會對機身表面造成較大損傷;③ 由于機身形狀和空化區域的壓力小于環境壓力,所以在后機身表面形成負壓區,從而產生吸力效應(Suction)[81],其結果主要體現為:導致空氣被大量吸入,形成流通效應(Ventilation)[82],造成機身浸濕面積的減小;④ 隨著速度和姿態逐漸平穩,飛機進入水面減速滑行階段,水氣混合效應隨之減弱并消失。上述4種效應中,吸力效應形成的負壓和區域主要由前飛速度和后機身形狀決定[77],使得機體產生較大的抬頭力矩(Nose-up moment),可能導致飛機失速,從而氣動力和氣動力矩迅速減小,使得前機身重重地拍擊水面上,并可能導致機頭潛入水中[83]的危險情況;而機身觸水點附近的正壓導致機體低頭(Nose-down),且此正壓力在機身撞擊水面后迅速達到最大值,使得后機身結構變形和破損,對乘員安全性和結構完整性造成極大威脅。研究結果表明[84],彈性體機身水上迫降的垂向過載峰值和水動載荷顯著低于剛體數值模擬的結果,因此,飛行器水上迫降的研究必須考慮彈性機身、水動力以及由于水氣固耦合造成氣動力和氣動力矩變化的影響。
總的來說,在研究飛行器水上迫降性能時,根據4個階段飛行器力學特性的不同,其數值計算方法有較大區別:① 在進近階段,飛行器僅受重力和氣動力,同時水面形狀和地面效應對飛行器氣動力影響最大,因此可以采用FVM方法研究此階段的氣動力特性。② 在水面撞擊階段,飛行器的受力最復雜,氣動力、水動力和結構響應之間相互耦合,水氣混合效應對機體運動影響較大,基于水氣固三相耦合的FVM方法可能是最佳的數值計算方法;另一方面,在飛行器設計和結構校核階段,結構強度一般是重點關注問題,對于設計人員而言,基于快速計算的前提,氣動力可以采用簡化力的方式進行處理,從而可以采用液固耦合的SPH-FEM或ALE-FEM方法校核水面撞擊時機身底部的結構響應。③ 在滑行階段,氣動力和水動力占主導,結構響應可以忽略,FVM方法在計算水氣兩相流方面具有精度較高的優勢。④ 在漂浮階段,針對流場環境的不同可以選擇不同的計算方法,詳細論述見本文第3節。
目前,工程上一般需要重點關注的水上迫降指標有[85]:① 保證機體結構尤其是機身的完整性,從而保證人員的安全;② 保證乘員不能承受過大的沖擊載荷;③ 保證飛機迫降后能平穩的在水面漂浮足夠長的時間,直到所有乘客從飛機上安全撤離。
圍繞上述3個指標,目前國內外學者在水上迫降的研究路線可以總結為:通過數值模擬的手段對影響水上迫降性能的參數進行詳細分析,并根據計算結果對飛行器操縱和機體結構設計提出技術指導和改進,具體可分為以下三方面。
2.1 飛行參數對水上迫降的影響
基于機身剛體模型,研究進近階段的飛行參數對撞擊過程的影響,如入水姿態角和位置、飛行速度、襟翼偏角等。研究重點為:分析著水時機體姿態角和飛行速度對氣動力和水動力、機體過載等結果的影響,并總結其影響規律,給出不同條件下的最佳迫降參數,為飛行器水上迫降試驗、設計和適航認證提供參考。
早期在此方面的研究以歐美學者為主,研究手段為簡化數值模型方法,其結果與試驗相比有較大出入,如:1988—1994年[86-88],以NASA和波音為主的機構采用動量理論、勢流理論和面元法等方法對DHC-7飛機、航天飛機和阿波羅登月艙等飛行器的水平迫降過程進行了評估,其計算結果誤差較大。進入21世紀后,隨著CFD算法和硬件技術的發展,眾多歐美學者和研究機構依托NASA、美軍和歐盟資助的項目,應用RANS、ALE和SPH方法對水上迫降問題進行了廣泛的研究,其模擬結果的精度與早期的簡化模型相比有了顯著提高。
由于歐美早期進行了大量的研究,其結果有力地支撐了空客和波音等公司后續類似機型的發展,所以近些年來,歐美學者在飛行參數對迫降影響方面的研究并不多見。而中國因為發展大飛機的需求,水上迫降問題在過去的10年中受到了國內眾多高校和科研院所的廣泛關注,包括:北京航空航天大學、南京航空航天大學、西北工業大學[89]、中國特種飛行器研究所[90]等,其模擬手段以CFD商用軟件為主。
北京航空航天大學劉沛清課題組[1,91-96]自2009年至今,以ARJ-21、C919和SAX-40、AG600等民機和水上飛機為研究對象,基于RANS求解器和二次開發的算法,對水上迫降問題進行了深入研究,得到了一般性的結論,如:迫降過程中,觸水時的沖擊作用導致飛機下表面水線附近產生較大的正壓峰值,入水后的浸沒滑行作用導致機身尾部出現大面積的負壓區,使飛機發生大幅抬頭現象,并指出對于常規布局的民機而言,其最佳迫降姿態為10°~12°,圖15[1,92]為該團隊的部分研究成果。
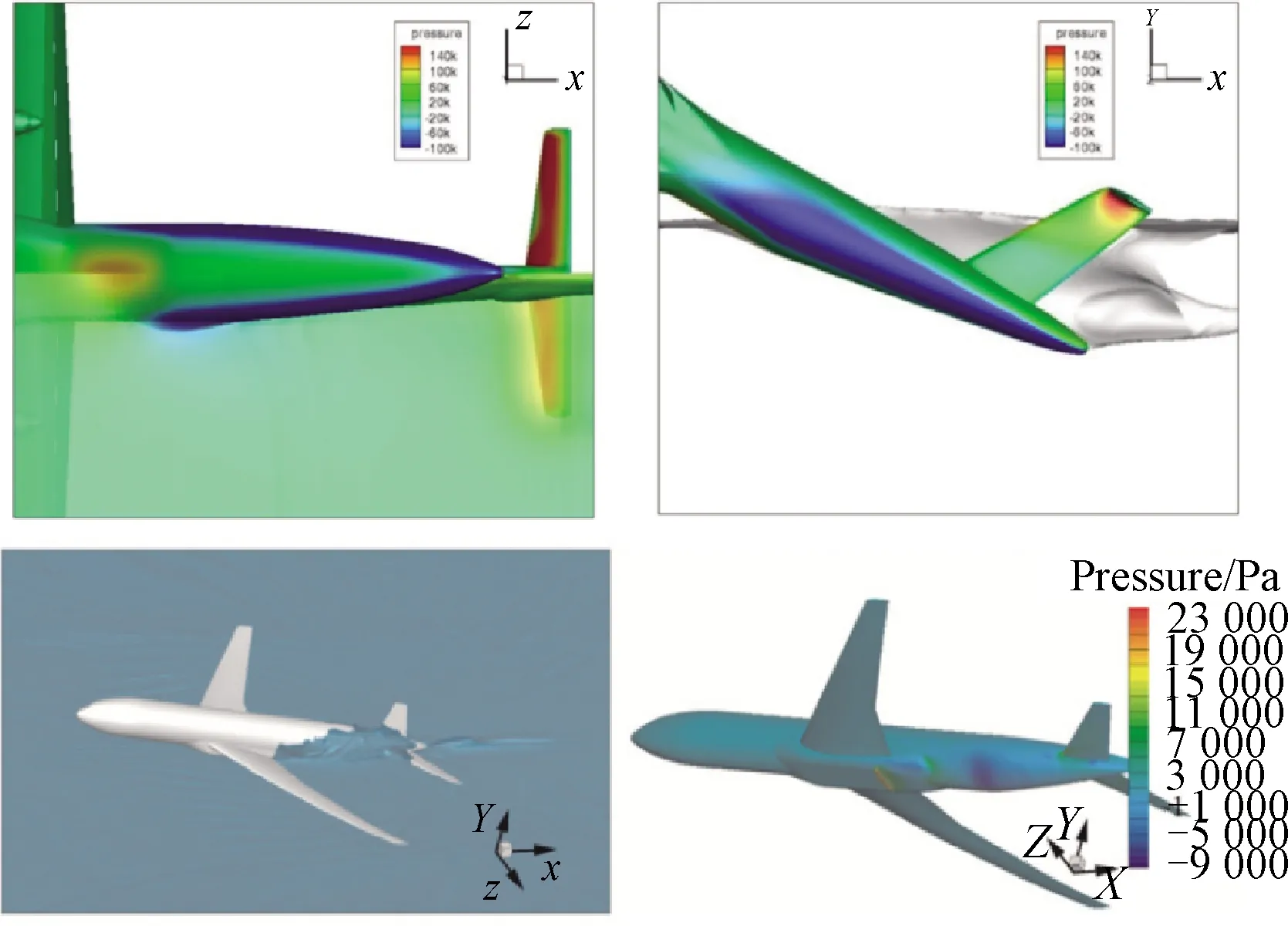
圖15 北航劉沛清團隊的部分水上迫降數值模擬結果[1,92]
南京航空航天大學童明波和肖天航課題組[97-107]自2016年以來主要采用FVM、SPH和ALE算法,重點研究了不同俯仰角、偏航角和滾轉角對直升機迫降的影響規律,并編寫擁有自主知識產權的SPH軟件,解決了SPH不能有效模擬尾部吸力的問題;同時運用動網格和嵌套網格策略,基于Fluent和Star CCM+軟件,采用高速平板模型和NACA2929常規布局飛機的縮比模型進行了數值驗證,從將這2種網格策略應用在地效飛行器、水上飛機、直升機和航天器的水上迫降問題的研究,圖16[99-100,107]展示了本團隊的部分研究成果。
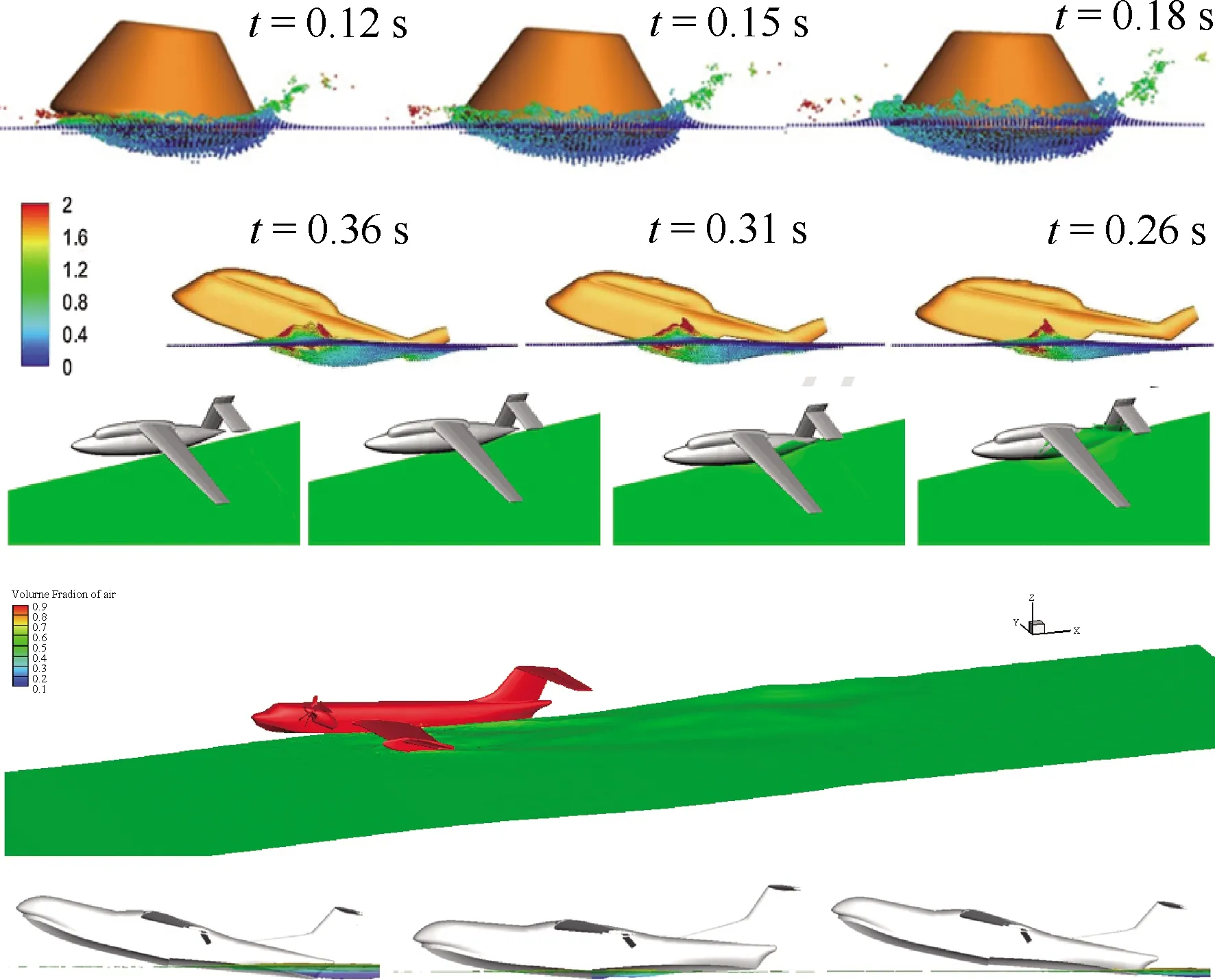
圖16 南航童明波和肖天航課題組的水上迫降模擬結果[99-100,107]
南京航空航天大學孫建紅團隊[108]采用LS-DYNA的ALE算法模擬了帶氣囊直升機的水上迫降過程(圖17),并分析了入水速度、姿態角和氣囊安裝位置對沖擊過載的影響。結果表明:下沉速度對沖擊載荷影響顯著,而水平速度對沖擊載荷影響較小;加裝氣囊能降低入水的沖擊加速度峰值;最佳入水迎角為8°。
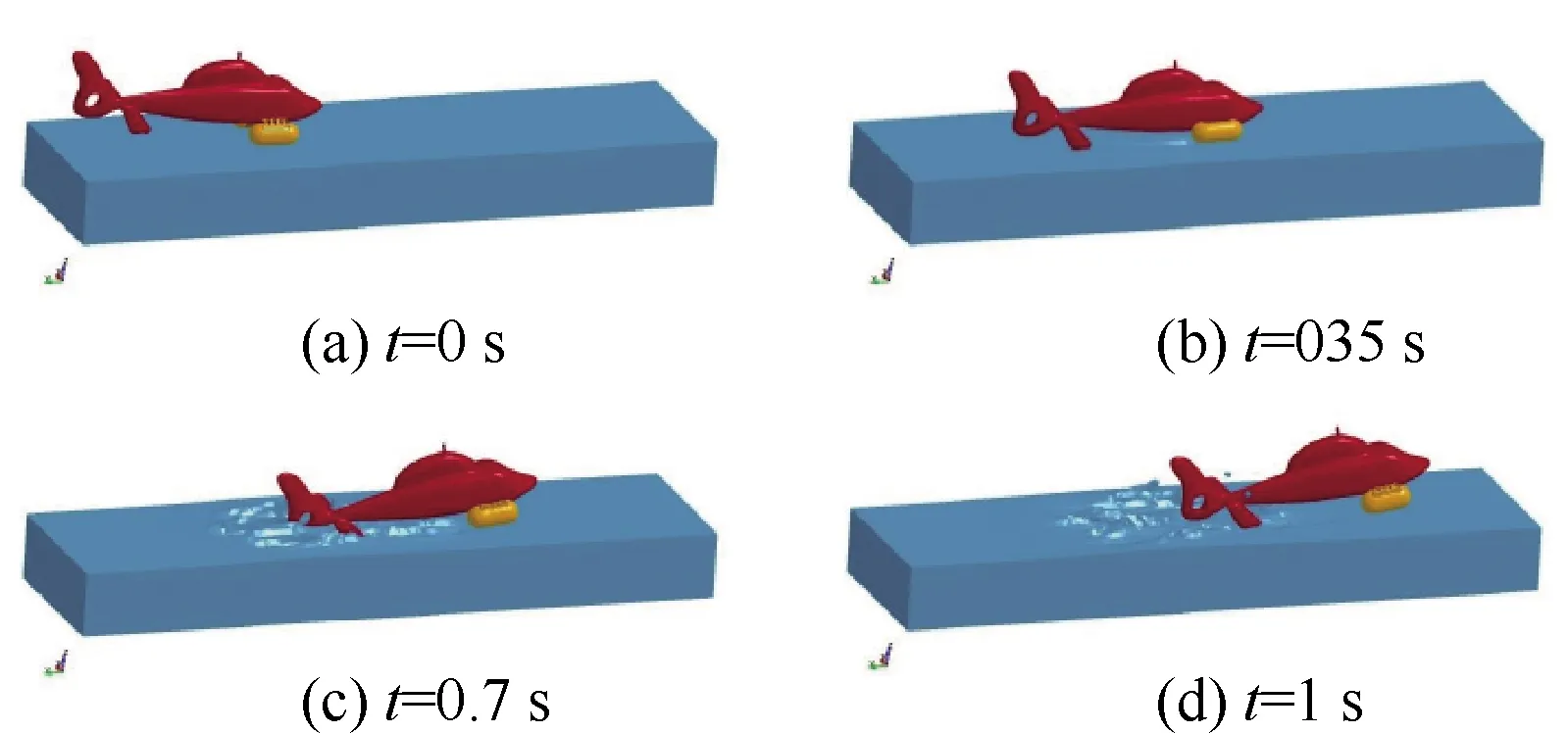
圖17 直升機靜水面著水模擬結果[108]
2.2 波浪水面對水上迫降的影響
基于機身剛體模型,研究波浪水面對迫降過程的影響。研究重點為:建立數值波浪模型,分析靜水面和波浪水面時水上迫降的性能差異,并研究迎浪、順浪、波高、波長以及不同波浪位置等波浪參數對結果的影響。
目前,國內外在此領域的研究起步較晚,近些年才開始研究波浪對水上迫降的影響。如圖18所示,英國學者Woodgate等[109]于2019年運用SPH方法對AW159直升機4級波浪著水過程進行了數值模擬,并將其結果與試驗值對比,指出SPH方法對粒子分辨率、流動模型參數、固體與流體的邊界處理敏感度較高。
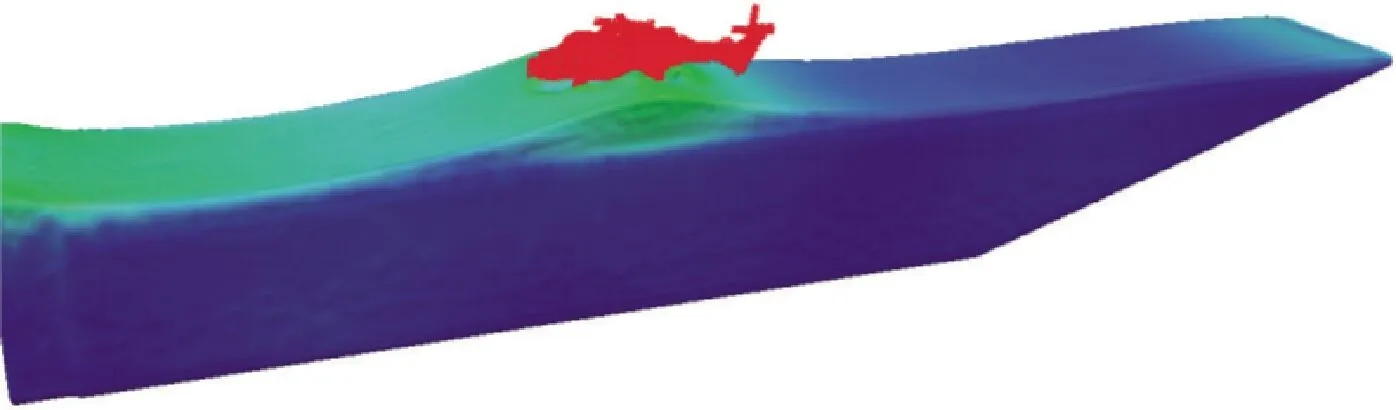
圖18 基于SPH方法的直升機波浪著水模擬結果[109]
自2016年以來,國內南京航空航天大學、北京航空航天大學[110]、上海飛機設計研究院[110]、中航工業特種飛行器研究所[111]、中國民航飛行學院[112]和哈爾濱工程大學[113]等單位對此課題開展了研究。其中,南航童明波和肖天航課題組[99,106-107]以ALE、SPH和RANS方法為數值模擬手段,分別采用推板造波(Push-plate wave-maker)和速度入口造波(Velocity-inlet wave-maker)方法建立三維數值非破碎波浪水池(3D Numerical non-breaking wave tank),研究了各類飛行器波浪情況的水上迫降的性能,重點分析了不同波浪等級和波浪迫降位置等波浪參數對飛行器水上迫降的影響,圖19所示為該團隊的部分研究成果。結果表明:與靜水面迫降相比,規則波和不規則波浪迫降時機體的運動影響和影響規律差別較大,波浪等級越大,機體垂向載荷越大,機體的姿態角響應則與波面形狀和迫降速度密切相關;波浪水面的觸水位置對機體運動響應影響較大。
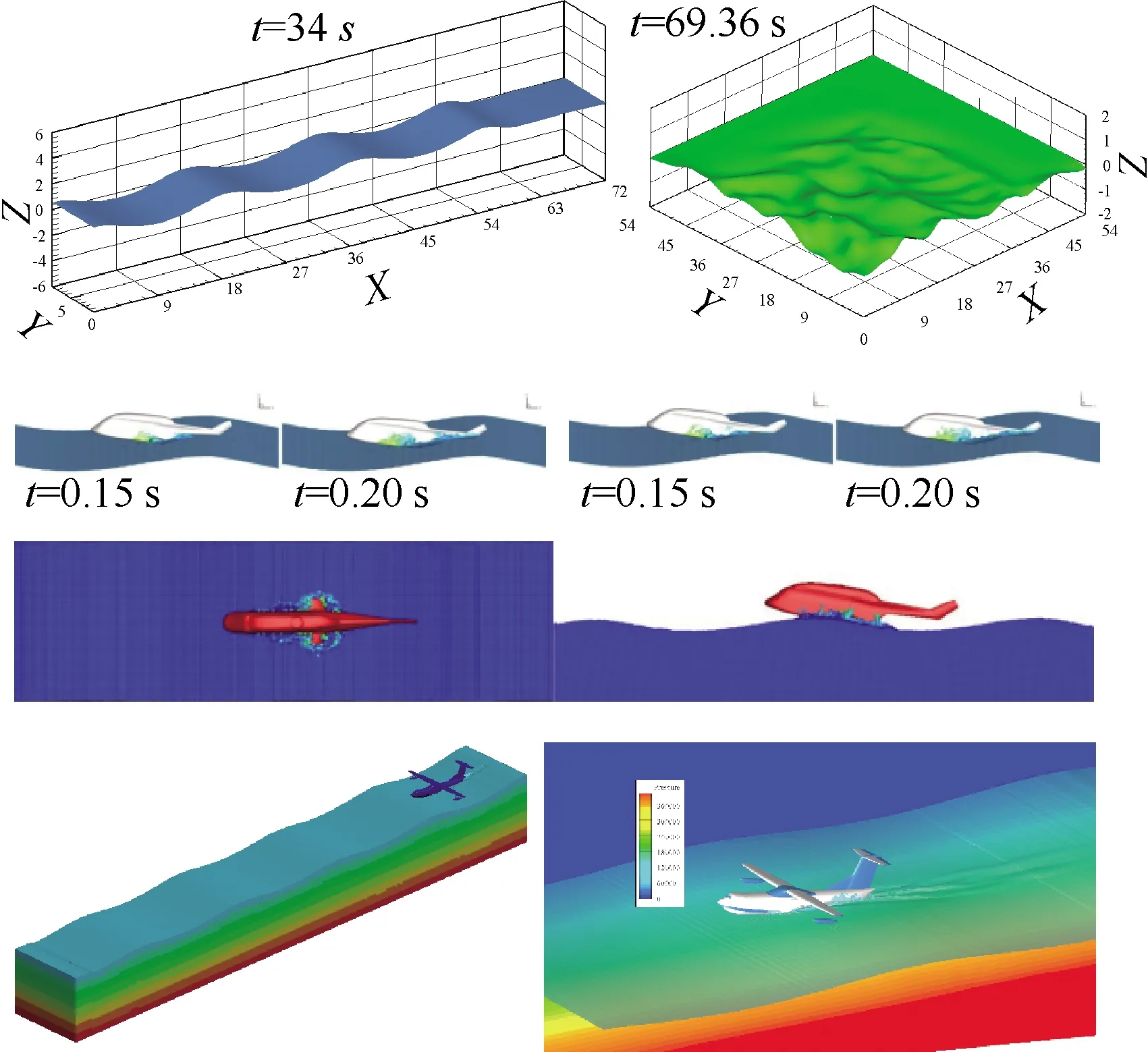
圖19 南航童明波和肖天航課題組飛行器波浪情況水上迫降數值結果
2019年,中航工業特種飛行器研究所Hu等[111]基于ABAQUS軟件中的CEL(Coupled Eulerian Lagrangian)方法,采用數值推板造波方法建立三維數值水池,研究了波高對雙浮筒水上飛機著水特性的影響,如圖20所示。結果表明:飛行器波浪著水產生明顯的彈跳現象(Bouncing phenomenon);波高越大,機體運動響應參數越大大;著水時機體遭遇第1個波時的載荷大于第2個波的值。
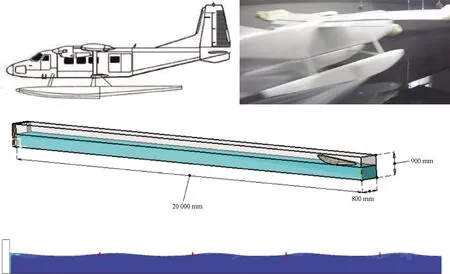
圖20 基于ABAQUS軟件CEL方法的水上飛機波浪著水模型和數值水池[111]
2.3 彈性體對水上迫降的影響
21世紀以來,隨著流固耦合技術的進步,尤其是SPH-FEM和ALE-FEM的發展,逐漸涌現了一批較為成熟的數值模擬軟件,如LS-DYNA、Pam-Crash、RADIOSS、MSC.DYTRAN等,使得國內外學者開始關注彈性體機身著水的特性,其研究重點為:建立彈性體有限元機身模型,結合流固耦合算法,研究不同姿態角和飛行速度等參數對彈性體機身著水的影響,重點考察機身應力分布和變形情況,確保機身結構的完整性,為機構結構設計提供參考。
自2000年以來,以英國克蘭菲爾德大學(Cranfield University, CU)、德國漢堡理工大學(Hamburg University of Technology,TUHH)、德國國家宇航研究中心(German Aerospace Center,DLR)、法國宇航實驗室(French National Aerospace Research Centre,ONEAR)、法國ESI公司(Engineering Systems International)、意大利航空研究中心的墜撞試驗室(Italian Aerospace Research Center, Crashworthiness Laboratory,CIRA)、空客結構動力學與氣彈部門(Structural Dynamics and Aeroelasticity Department Military Aircraft.Airbus Defence and Space)、NASA蘭利沖擊動力試驗室(Impact Dynamics Research Facility of NASA Langley Research Center)、美國陸軍研究試驗室(US Army Research Laboratory)為代表的歐美研究機構在歐盟、NASA和美國軍方的資助下,基于ACAP(Sikorsky Advanced Composite Airframe Program)、CRAHVI(Crashworthiness of Aircraft for High Velocity Impact)、CAST(Crashworthiness of Helicopters onto Water)、SMAES(Smart Aircraft in Emergency Situations)和SARAH(Increased Safety and Robust Certification for Ditching of Aircrafts and Helicopters)等項目[11,20-22,114-123]對彈性飛行器入水問題進行了大量研究,研究機型有:西科斯基S-75直升機、荷蘭福克VFW614客機、空客A321、空客CN235軍機和英國韋斯特蘭WG30直升機。
2000年,美國學者Fasanella等[114]基于美國陸軍研究中心資助的ACPC項目,采用MSC.Dytran軟件的FEM方法對西科斯基S-75 ACAP直升機進行了全尺寸全機彈性體有限元建模,分析了該直升機地面迫降的結構響應,并與蘭利中心的試驗結果進行了對比,如圖21所示。該研究通過與試驗結果的對比,數值模擬準確預報了直升機的總體變形形狀、宏觀參數的量級、機腹壁板的機構響應和發動機支撐梁的失效,驗證了MSC.Dytran軟件中FEM方法研究飛行器墜撞機體結構響應的合理性。
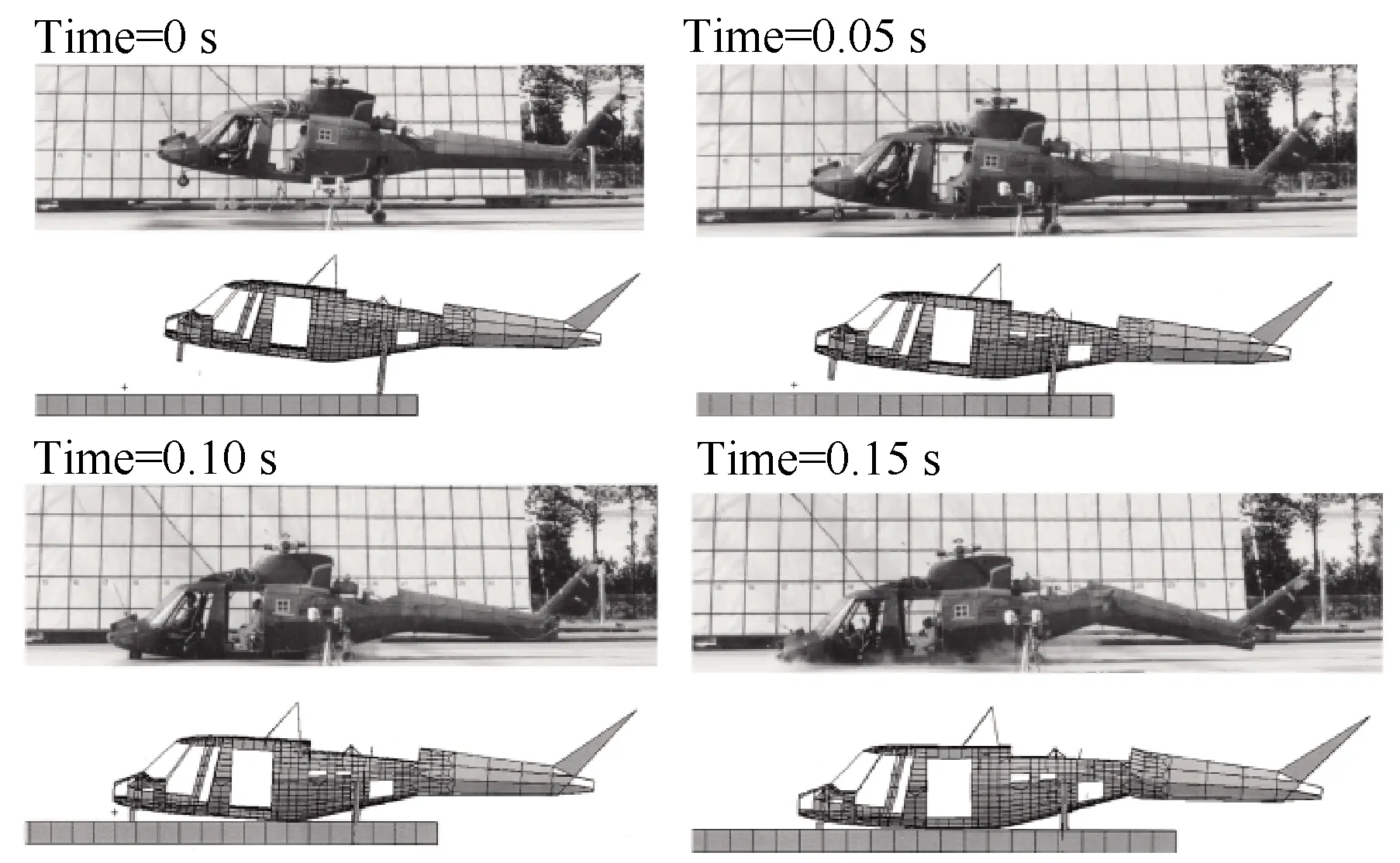
圖21 全尺寸S-75 ACPC直升機地面迫降預測和真實結果對比[114]
2001年,德國學者Bensch等[115]基于KRASH軟件(此軟件最初由美國陸軍資助開發[116]),開發了數值計算與理論方法相結合的混合求解策略(圖22):通過水動力與結構響應和機體表面壓力分布分開求解后耦合的方式;并采用此粗略對荷蘭福克VFW614客機有計劃水上迫降問題進行了研究,與試驗測試結果進行了對比。此混合求解策略對計算復雜構型飛行器彈性體水上迫降全過程的模擬起到了較強的啟發作用。
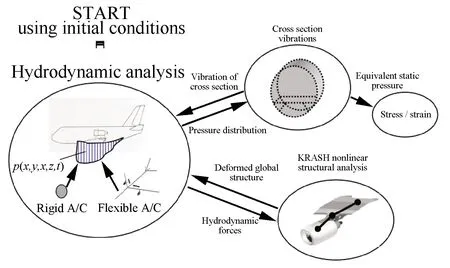
圖22 飛行器水上迫降水氣固三相耦合混合求解策略[115]
2002年,法宇航(ONERA)學者Ortiz等[117]基于CRAHVI項目,應用RADIOSS軟件中的ALE/SPH方法與有限元耦合的方式(圖23),分析了全尺寸空客A321飛機迫降時機身的變形和壓力情況,該論文有力地證明了ALE/SPH-FEM方法研究彈性體飛機入水的可行性,但由于網格變形較大導致ALE算法產生負體積,從而出現計算過程不穩定的問題。
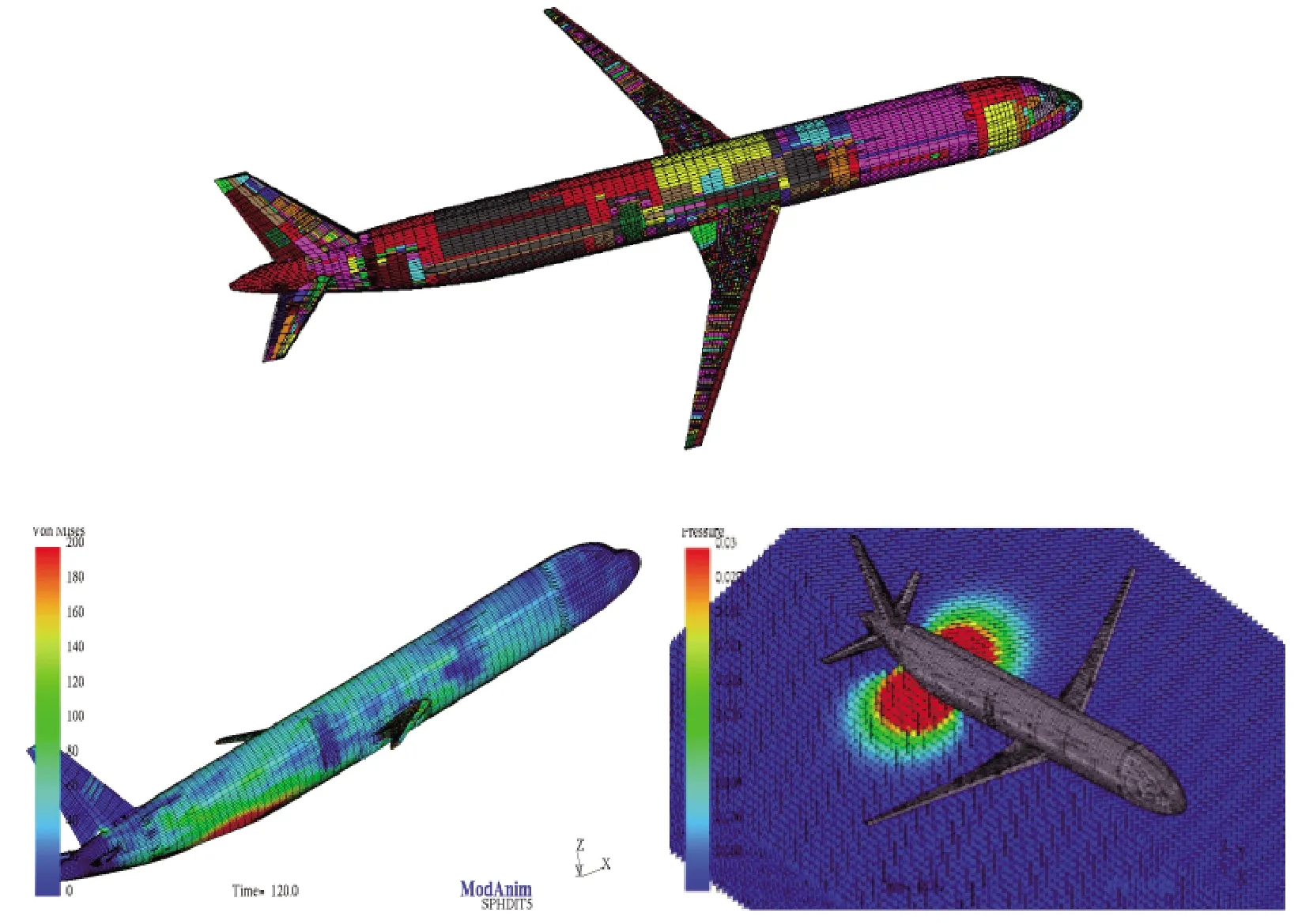
圖23 全尺寸A321彈性體迫降模型和計算結果[117]
隨后,在2000—2008年期間,以Vigliotti[118-119]和Hushes[11,120-121]等為代表的克蘭菲爾德大學、CIRA[122]、DLR、ESI、NLR和ONERA等研究機構基于歐盟的CAST項目,對全尺寸韋斯特蘭WG30直升機水面墜撞和水上迫降進行了試驗,其試驗結果對直升機水上迫降研究和機身結構設計起到了重要的指導作用,如:直升機水面撞擊后幾秒內會發生傾覆和沉沒、起落架結構變形對機身結構吸能幾乎沒有貢獻等。圖24和圖25為該項目的試驗場地和試驗結果。
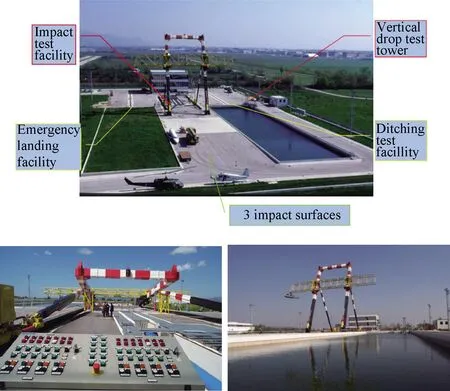
圖24 意大利宇航研究中心-航空結構沖擊測試試驗室的全尺寸飛行器迫降水池[122]
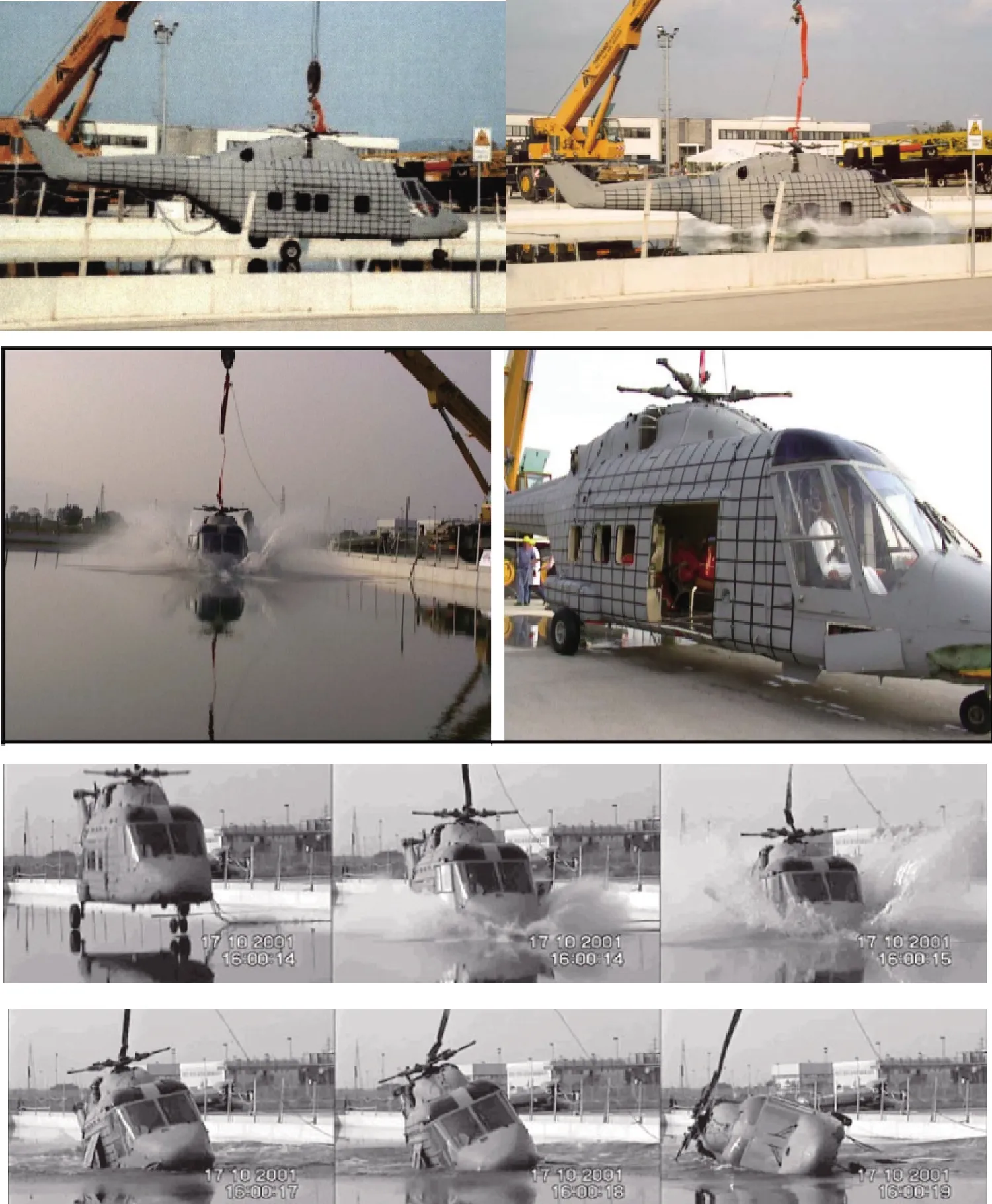
圖25 WG30全尺寸直升機水上撞擊試驗[17,118,122]
同時,該項目分別采用Pam-Crash和LS-DYNA軟件中的ALE/SPH-FEM方法進行了數值模擬,其主要結論有:① 撞擊初期的數值模擬結果與試驗相比精度較好,從而證明了這2個軟件在研究彈性體飛行器水面墜撞特性的可行性和精度,但是正確模擬水上迫降全過程還需要在氣動力和水動力模擬方面做出進一步的努力;② 從宏觀量化數據的對比來看,機身結構變形模擬效果較好,機體加速度時歷曲線高于試驗結果,分析原因為數值模型沒有考慮空氣的影響,從而缺少了氣墊的緩沖作用;③ 從細觀的量化對比結果來看,機身表面壓力、結構應力和失效等精細化數值模擬結果誤差較大,尤其是壓力分布的時歷結果對于試驗和模擬而言均存在較大困難。圖26[118,120]為該項目的部分試驗和數值模擬結果。
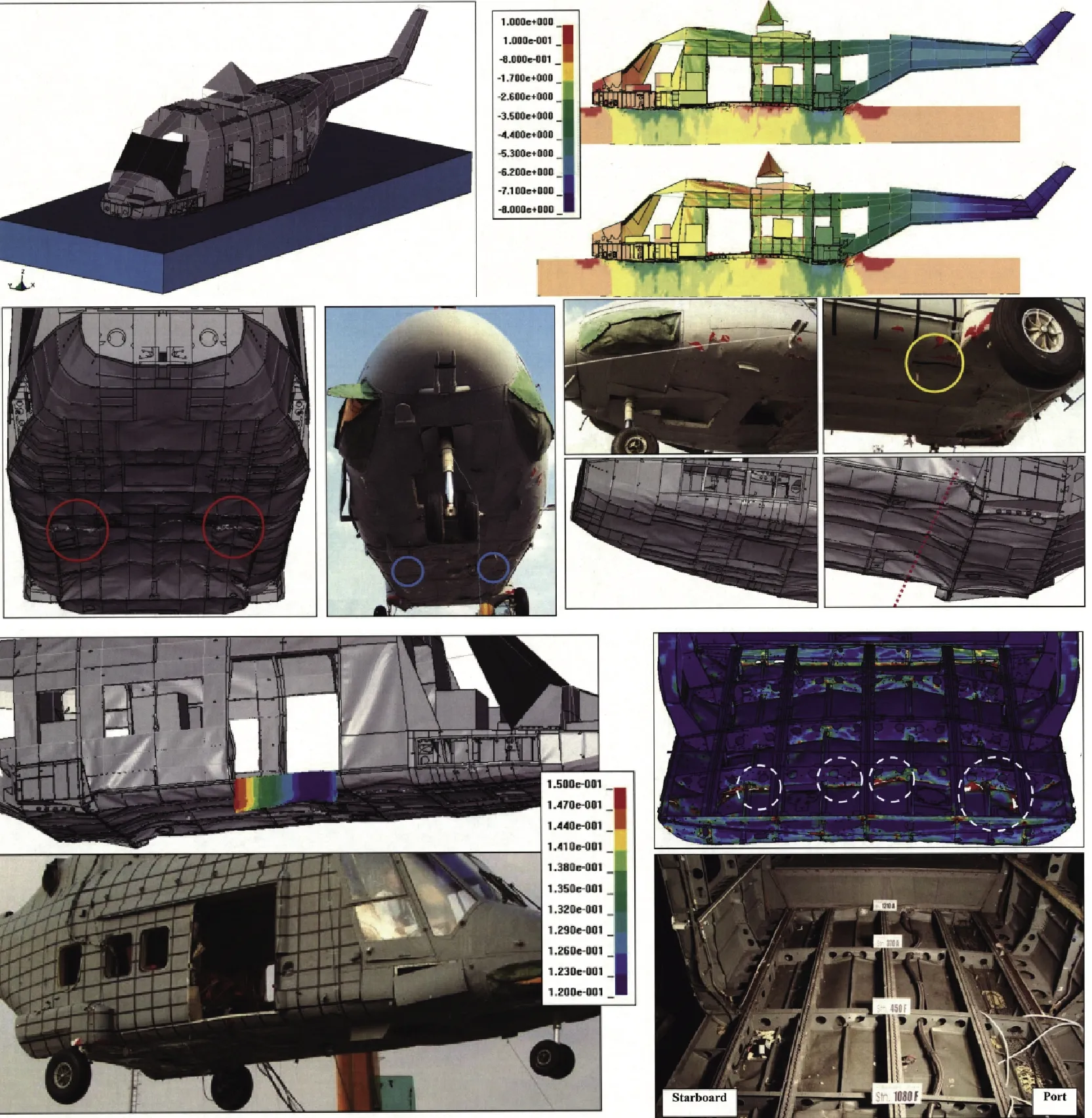
圖26 WG30全尺寸直升機水上撞擊模擬和試驗結果對比[118,120]
針對CAST項目的研究結果,由英國克蘭菲爾德大學牽頭,聯合歐洲多國的高校、公司和研究機構,于2011—2014年開始了歐盟資助的SMAES項目[123]的研究,該項目核心目的:發展用于飛行器水上迫降的數值模擬算法和工具,其驗證試驗的機型為空客CN235軍用運輸機。該項目最重要的研究成果之一為解決了SPH計算水上迫降時不能模擬尾部吸力的問題,如:Gomes[124]、Groenenboom[125]和Climent[17]等,通過修正SPH罰函數接觸算法中的SEPTHK厚度因子[126],應用LS-DYNA和PamCrash軟件的ALE和SPH算法,對CN235飛機的剛體和彈性體水上迫降進行了模擬,結論表明尾部吸力對結果影響較大。圖27[17,124-126]為部分試驗和數值模擬成果。
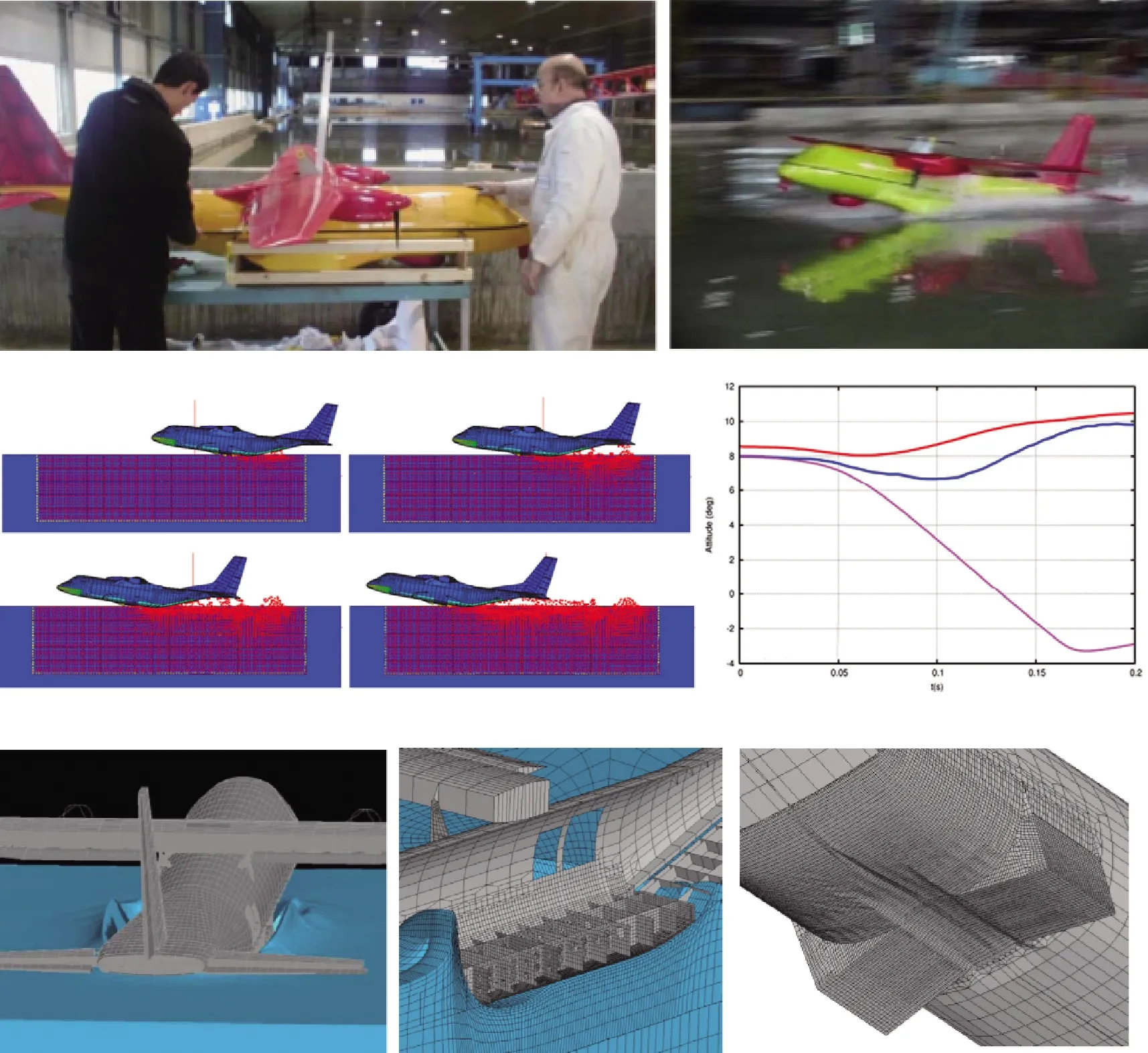
圖27 空客CN235軍用運輸機縮比模型水上迫降試驗和彈性體模擬結果[17,124-126]
2016—2020年,歐盟在水上迫降領域投入了更多的人力和物力,發起了SARAH項目,德國、法國、意大利和西班牙參與了該項目的研究,項目的研究目的為:針對下一代固定翼飛機和直升機,為水上迫降提供適航規章和認證方面的指導,同時提高飛行器水上迫降的結構完整性和安全性。為此,Seiler和Climent等[20,127]通過建立全機彈性體有限元模型,采用SPH和RANS的數值模擬方法,重點研究了飛行器水上迫降的受力特性和吸能模式,并從飛行器設計和適航取證的角度提供了建議:① SPH方法在模擬只有下沉速度的飛行器水面撞擊時(如直升機),能得到滿意的結果,但是在計算有前飛速度的飛行器(如客機)水上迫降時則有較大缺陷,因此,空客的相關部門已停止了這方面的研究[127];② RANS方法能保證流體特性的模擬,但是在考慮水氣固三相耦合的水上迫降方面還存在計算成本過高和效率低的缺點。圖28為該項目的部分結果[22,127]。
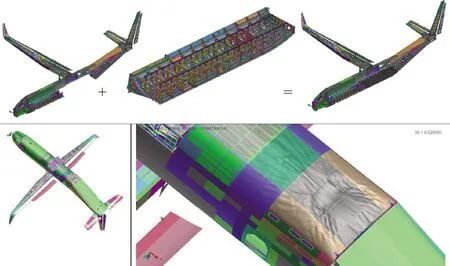
圖28 歐盟SARAH項目的彈性體飛機水平迫降的數值模擬研究成果[22,127]
國內在彈性體飛行器水上迫降的研究則主要采用MSC.Dytran和LS-DYNA軟件的ALE-FEM算法,研究單位以北京航空航天大學[128-130]、南京航空航天大學[131]、上海交通大學[132]、上海飛機設計研究院[84]、武漢理工大學[90,133]和中國特種飛行器研究所[90]為主。
2008年,胡大勇等[128]基于某型運輸機水上迫降模型試驗得到的機身壓力分布,在MSC.Dytran軟件中建立了全機有限元模型,通過在機身底部施加壓力邊界條件的方式,校核了機身蒙皮強度,圖29為機身壓力施加示意圖。

圖29 某型運輸機水上迫降壓力邊界條件施加[128]
2010—2012年,張韜等[130]對某型支線客機進行了水上迫降縮比試驗,并基于MSC.Dytran軟件中的流固耦合算法,建立了彈性體水上迫降數值模型,結果表明:尾部吸力對水上迫降影響較大,且必須考慮空氣對尾部吸力模擬的影響。圖30 所示為該支線客機的水上迫降試驗和數值模擬的部分結果。
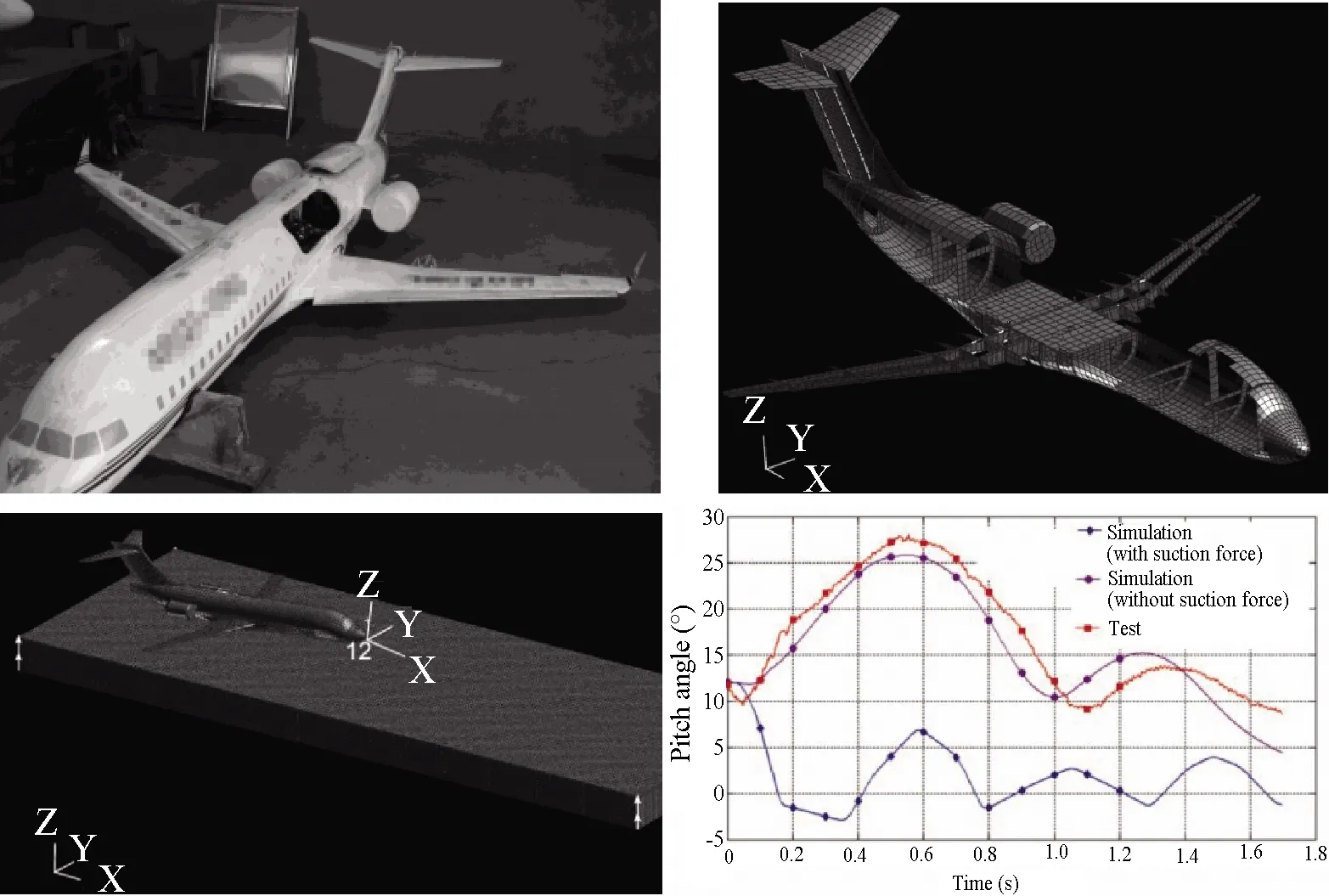
圖30 某型支線客機水上迫降試驗和數值模擬結果[130]
2014年,張蘇等[90,133]采用ALE算法,分別建立了民機水上迫降剛體和變形體有限元模型,其中變形體模型的建模策略為:將CFD軟件計算的氣動力施加在飛機結構上,建立后機身有限元模型,飛機其余部分按照剛體進行處理,如圖31所示。該研究總結了剛體模型與變形體模型的水上迫降運動特性的差異,并指出試驗和數值模擬中采用剛體模型不能完全準確地體現飛機水上迫降的真實性能,且變形體模型的法向和縱向過載峰值均低于剛體模型,說明機身底部變形能明顯吸收沖擊能量,從而提高水上迫降時乘員的安全性。
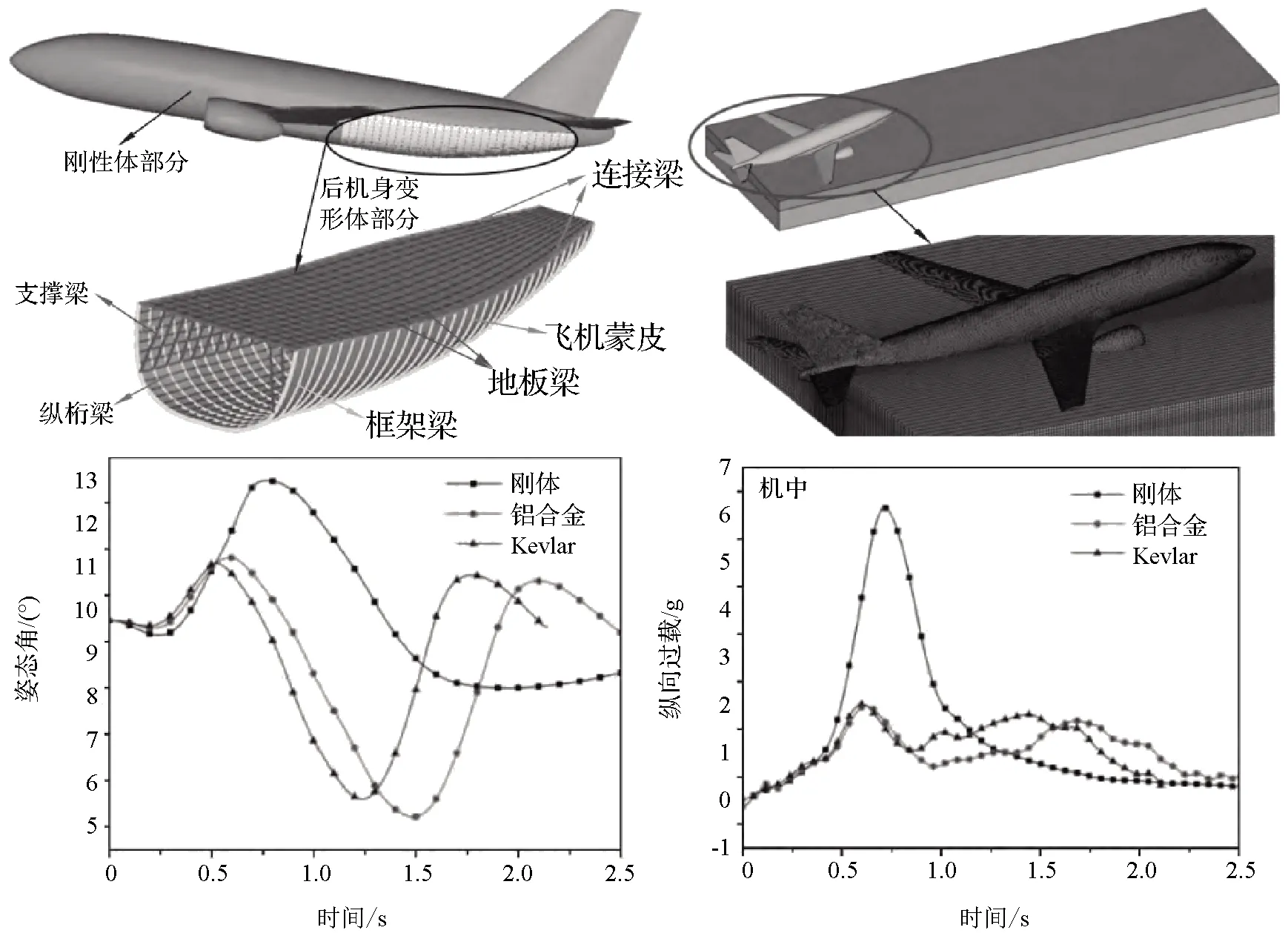
圖31 民機水上迫降彈性體建模與模擬結果[90,133]
2.4 飛行器水上迫降數值模擬總結與展望
綜上所述,國外自21世紀以來,基于歐盟和NASA、美國軍方的資助下,在水上迫降飛行參數和彈性體模型方面成果較為豐碩,極大地推動了水上迫降領域的研究,尤其是ALE和SPH在工程領域的應用,研發了KRASH、Pam-Crash和LS-DYNA等軟件,在算法和軟件等方面積累了深厚的自主知識產權優勢;國內的主要研究重點為基于剛體模型研究飛行速度和入水姿態角對水上迫降的影響,針對彈性體迫降的研究成果較少,在剛體飛機波浪情況水上迫降的研究具有較大優勢,主要研究工具為:Fluent、Star CCM+、Pam-Crash、LS-DYNA和MSC.Dytran等商業軟件,嚴重缺乏算法和軟件的自主研發能力,對國外軟件的依賴度非常高。
針對以上水上迫降領域,尤其是水面撞擊階段的研究進展和國內外發展現狀,存在的難點問題主要有:進近階段,復雜風浪流環境飛行器地面效應的氣動力特性;水面撞擊階段,水氣混合效應機理研究、水氣固耦合和尾部吸力對機體載荷和運動響應的影響規律;高速水流沖擊的結構動力學特性;水面滑行階段,波浪對機體運動規律的影響,以及機翼振動與波浪遭遇頻率的耦合特性。基于這些問題提出以下展望和建議:
1)將水上迫降的數值建模方式從兩相流剛體模型和單相流彈性體模型,拓展到水氣固三相耦合模型,從而全面地研究飛行器水上迫降氣動力、水動力和機身結構響應特性。
2)針對目前已有的各類飛行器機身結構布局形式,研究機身結構吸能模式,確保飛行器在水上迫降時的結構完整性,為適航取證提供更加細致和量化的技術支持,并為下一代飛行器的發展提供設計依據和參考。
3)將飛行器水上迫降的研究從有計劃迫降延伸至無計劃水上迫降,評估極端情況下的飛行參數對機體結構完整性和乘客安全性的影響,如較大的迫降初速度和負姿態角等。
4)基于國內已有的波浪情況飛行器水上迫降的研究成果,將水面情況從規則波向不規則波和風浪環境模擬方面延伸,進一步確保飛行器水上迫降數值模擬時水面環境的真實性。
5)從機理研究的角度出發,采用更加精細化的數值模擬算法,如基于FVM的LES和DNS方法,以及完全耦合等方法,深入研究水上迫降撞擊階段的力學特性和水氣混合效應,探索氣動力、水動力和結構變形對飛行器水面撞擊特性、結構完整性和乘客安全性的影響規律。
6)借鑒歐盟的合作研究模式,加大水上迫降縮比和全尺寸模型的試驗研究,如標模試驗,并向國內各大高校和科研院所公開試驗模型和數據,為水上迫降數值模擬提供對比參考依據,提升國內水上迫降的整體研究實力。
7)充分利用現有的研究成果,借鑒國外數值計算方法研究的成功經驗和失敗教訓,按照從易到難的發展策略,對標國外成熟的商業軟件,加大適用于水上迫降研究的數值計算方法和軟件的研究和開發,從而提高我國在水上迫降數值模擬的自主研究能力。
8)建議由國內在飛行器水上迫降領域具有深厚積累和優勢的科研單位,如北京航空航天大學、南京航空航天大學、中國特種飛行器研究所、中國直升機設計研究所等,定期召開面向國內和國際的飛行器水上迫降研討會和國際會議,促進業內學者和工程師的學術交流,逐步形成開放活躍的研究氛圍,擴大國際影響力。
3 水上漂浮數值模擬應用與展望
自人類發明飛行器以來,海上飛行活動的逐漸增加,尤其是具備海上漂浮設備的直升機的大規模使用和民機設計時的漂浮性能要求,如中國民用航空規章第25部對運輸類飛機的漂浮性能提出了明確的規定[134]:“在合理可能的水上條件下,飛機的漂浮時間和配平能使所有乘員離開飛機并乘上救生船。如果用浮力和配平計算來表明符合此規定,則必須適當考慮可能的結構損傷和滲漏。如果飛機具有可應急放油的燃油箱,而且有理由預期該油箱能經受水上迫降而不滲漏,則能應急放出的燃油體積可作為產生浮力的體積”;美國FAA也對飛行器漂浮和平衡特性提出了明確要求[135],使得飛行器緊急水面漂浮的重要性日趨凸顯。因此,有必要對飛行器水面漂浮進行總結。
作為飛行器水上迫降和墜撞的最后一個階段,水面漂浮(Floating)指飛行器在無動力狀態下,受到風力、重力、靜水浮力和水動力作用下的動態過程。一般而言,飛行器的水上漂浮性能最重要的2個特性[31,136]為:漂浮特性和動態平衡特性。
漂浮特性指飛行器迫降后有充足的漂浮時間保證全部乘員離開飛機,包括3個具體的參數:自由浮態、漂浮穩性及漂浮時間。前兩者主要從靜態配平角度分析飛行器的漂浮能力[137],后者則采用準靜態和動態的方法分析飛行器的動態進水及下沉情況。
如圖32所示,自由浮態指飛行器僅在重力和浮力作用下所達到的平衡姿態,同時,根據水上迫降后飛行器是否發生破損分為完整浮態和破艙浮態[137]。圖中CG為重心,CF為浮心。其中,完整浮態不需要考慮進水的影響,當飛行器重力與浮力相等且位于同一垂線時,飛行器處于平衡狀態,此時的入水深度和姿態角即為完整浮態,一般通過排水體積法[138]計算;破艙浮態則需要在不沉性理論[38]的基礎上,綜合考慮各位置的破損面積(圖32)、內部艙室的分段、人員的分布等情況,主要采用靜力學理論、動力不沉性理論和概率論等方法進行分析。
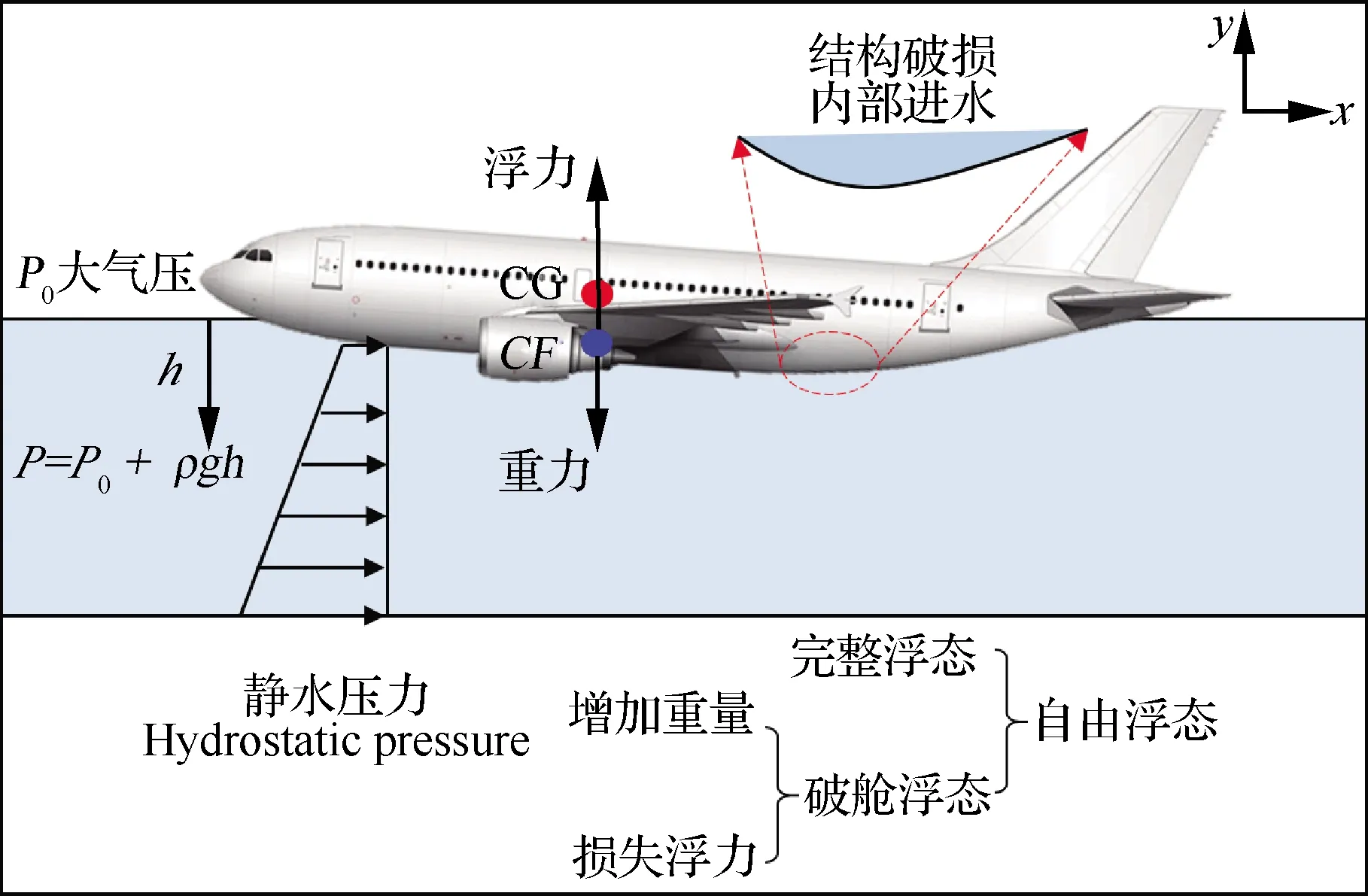
圖32 飛行器自由浮態示意圖
漂浮穩性指飛行器發生傾斜時自行恢復到原來平衡位置的能力。若飛行器從平衡位置開始逐漸傾斜且傾斜的角速度很小,則此時的傾斜角與恢復力矩之間的關系曲線稱為靜穩性恢復力矩曲線,簡稱為靜穩性曲線;當傾斜角速度較大時,慣性對船舶漂浮穩性的影響不可忽略,此時傾斜角與穩性力矩之間的關系稱為動穩性曲線。從靜穩性的定義可知,當飛行器的靜穩性力矩為零時,其對應的傾斜角即為飛行器的浮態結果。在穩性的發展歷程中,穩性研究一般針對恢復力矩的計算及影響因素展開,在工程分析中,主要以靜穩性曲線初步判斷飛行器的漂浮穩定性。
漂浮時間指飛行器的進水線從自由水線達到客艙甲板或機室艙門所需的時間。目前漂浮時間的研究方法分為兩類[139]:流場域數值模擬方法,如:基于RANS的CFD方法和SPH方法;以不沉性理論[38]為基礎的簡化方法,也稱為準靜態方法(Quasi-static Method)。
動態平衡特性指飛行器水上迫降并減速滑行后,浮體在外界激勵的作用下維持動態平衡姿態的能力,即:研究飛行器在風浪作用下的姿態動態變化過程,避免發生傾覆和下沉等事故,確保飛行器以安全姿態保持平衡且姿態角和升沉位移等運動參數變化較小,從而保證飛行器的安全逃生出口位于水面之上。圖33所示為飛行器在風浪作用下的受力分析示意圖,包括側風力、側風力矩、波浪力、波浪力矩和靜水壓力等。其中,風浪的作用力隨著飛行器姿態的變化而改變,復雜的風浪耦合作用,尤其是不規則風浪的影響,加大了飛行器海上漂浮動態特性的分析難度,目前,通過數值模擬的方法完整實現此過程的分析存在較大難度。因此,衍生出了切片方法和各類運動預報方法,其主要策略為:根據已知若干波浪周期下飛行器的平衡特性計算結果,基于各類理論和假設,建立飛行器橫搖-縱搖-垂蕩動力學模型[38],從而推算剩余未知風浪周期對飛行器動態漂浮運動曲線的影響。
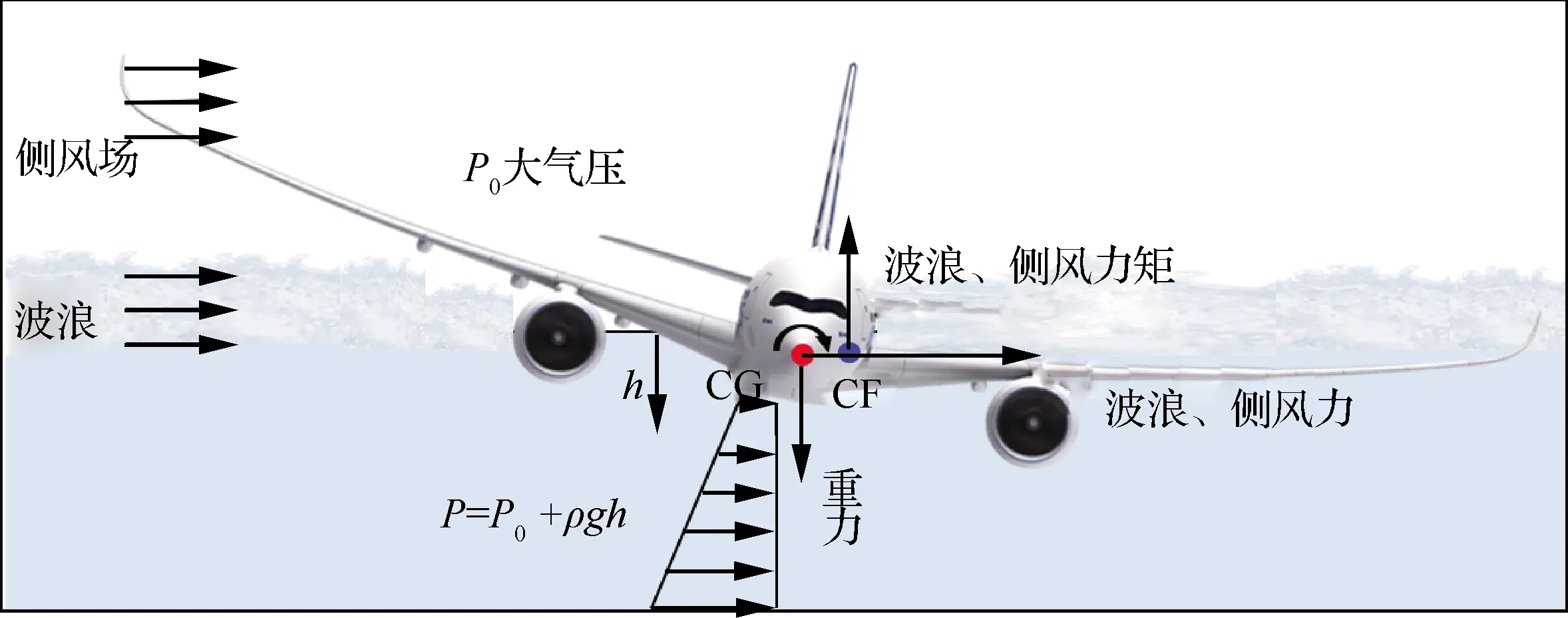
圖33 飛行器漂浮受力示意圖
總的來說,在研究飛行器水上漂浮性能時,一般需要滿足的指標有:① 飛行器自身是否具有足夠的漂浮能力;② 飛行器發生破損時,是否具有漂浮能力和足夠的漂浮時間以保障乘員撤離;③ 在 惡劣的風浪環境下,飛行器是否會發生下沉或者傾覆等危險。
圍繞上述3個指標,目前國內外學者對水面飛行器的漂浮性能研究,主要關注的重點有以下3個方面。
3.1 飛行器構型參數對水上漂浮的影響
基于剛體模型,校核飛行器靜浮態和穩性,研究飛行器構型對靜水面情況下漂浮特性的影響,如機身外形、重心位置、氣囊和氣墊等。
靜穩性研究最早起源于于船舶領域,國外學者早期通過初穩心高度判斷船舶的穩性,并提出了穩性力矩曲線的概念[140]。隨后,飛行器設計和研究人員借鑒船舶領域的研究成果,引入靜穩性的概念,用于飛行器水上漂浮性能的研究。
早期在這方面的研究主要采用試驗和理論計算結合的方法,其計算結果精度較低,如:1970年,John和William[141]通過大量試驗結果建立了幾種典型漂浮情況的幾何外形,根據特征尺寸推導了穩性函數,并將其引用到帶氣囊的貝爾206A的靜穩性計算當中,研究了不同氣囊安裝方式對穩性的影響,但計算結果并不精確,計算方法存在較大的局限性,不具備普適性。2005年,Taylor[142]采用HyperMesh軟件的面網格建立了阿波羅返回艙幾何外形,將能計算封閉曲面體積的Green理論集成到FloatStab軟件中,從而得到了阿波羅返回艙的自由浮態和靜穩性曲線;同時,針對阿波羅11號返回艙海上漂浮時的翻轉問題,對加裝氣囊后的模型進行了漂浮特性分析,如圖34所示,加裝氣囊后的靜穩性曲線的振幅大幅度降低,其漂浮特性更好。
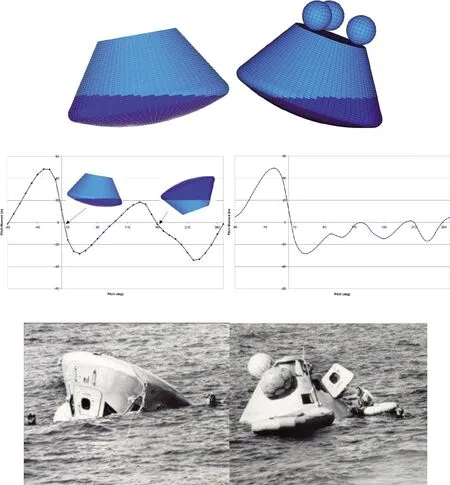
圖34 阿波羅返回艙數值模擬和試驗結果[142]
2015年,北京航空航天大學的趙蕓可等[143]以自編的VB程序為計算平臺,簡化飛機幾何外形,采用梯形法計算飛機水下浸沒部分的體積,利用阿基米德原理計算了浮力和浮力矩,求解了固定翼飛機靜水面漂浮特性,如圖35所示。結論指出:上單翼飛機的靜浮態姿態角為輕微抬頭,其使用重量和重心包線內均能保證飛機靜水面的穩定漂浮。
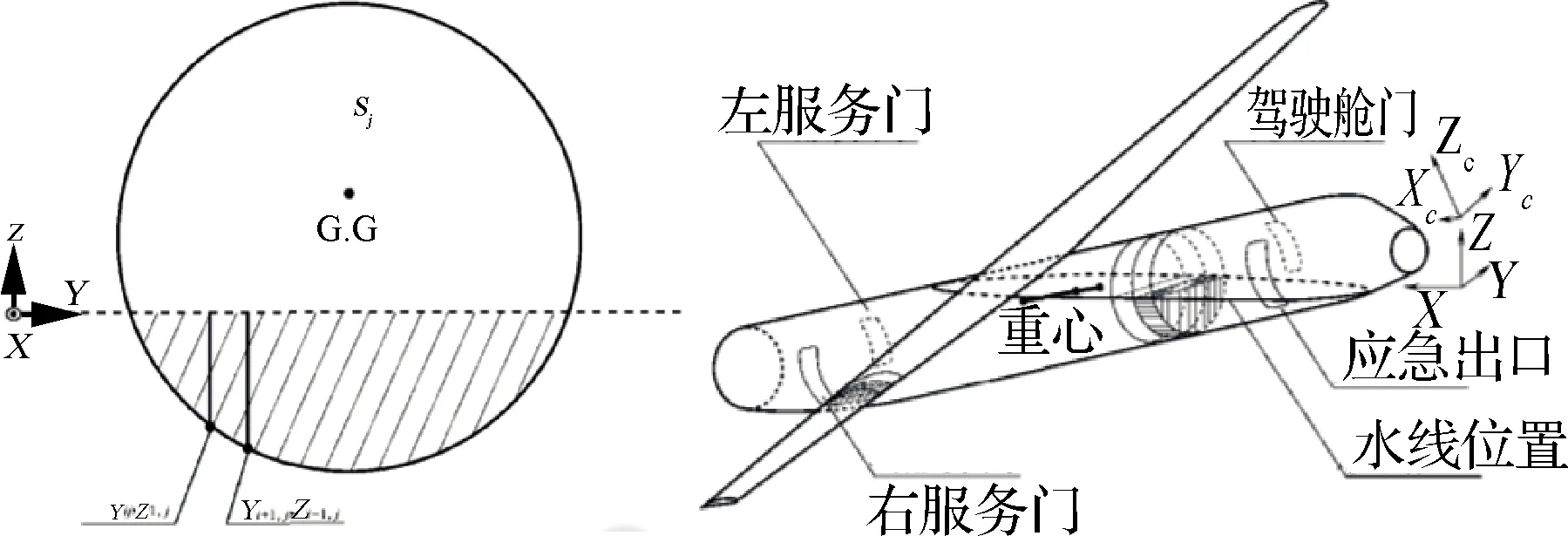
圖35 飛機浮力和浮力矩求解示意圖[143]
隨著計算機技術的發展,復雜幾何外形描述精度逐漸提高,涌現了一批優秀的三維造型軟件如:CATIA、SolidWorks等,國內學者將排水體積法與這類軟件結合,求解浮力和浮力力矩,得到了比較精確的漂浮特性結果。1993年,上海交通大學的學者針對移動式海上平臺提出了漂浮穩性計算方法[144],并于2009年基于SolidWorks開發研究了漂浮穩性計算程序[145]。自2012年起,中國直升機研究所汪正中等[146-147]根據水上飛機的橫向穩性計算原理和海洋船舶穩性規范,結合三維造型軟件,建立了直升機的橫向穩性計算方法(圖36),對漂浮穩性進行了分析,并與試驗進行對比,其研究結果表明:直升機的靜水橫向穩性可以忽略氣囊的變形對結果的影響。
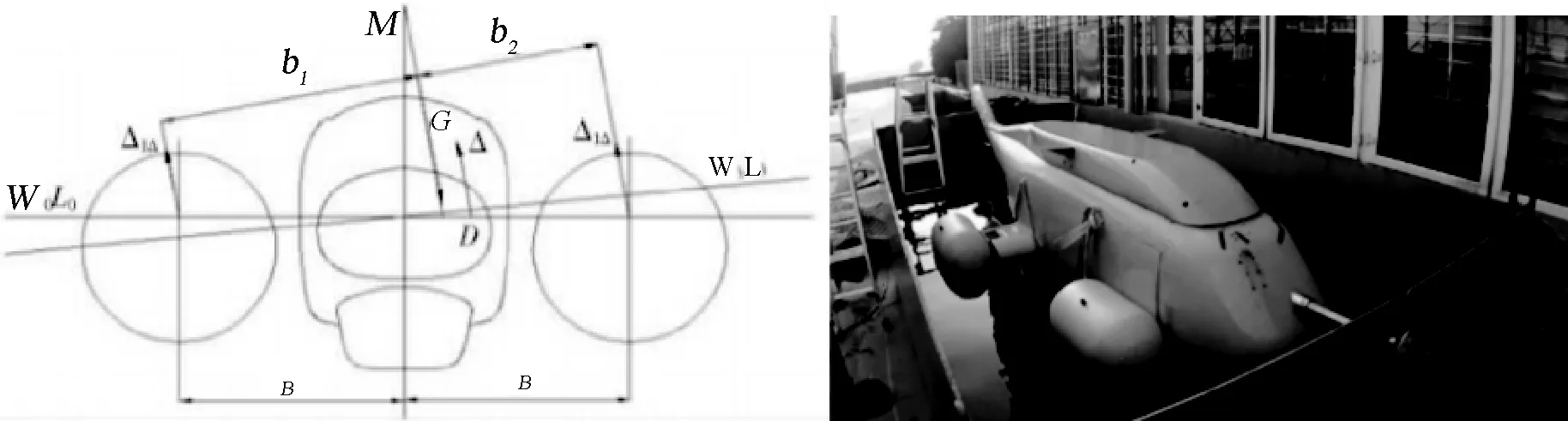
圖36 直升機靜穩性計算示意圖和縮比試驗模型[146]
總的來說,排水體積法能計算飛行器的自由浮態,但是存在簡化幾何外形的缺點;同時,在計算靜穩性和動穩性曲線時忽略了水動力的影響,存在一定誤差。基于這2個問題,國內學者近年來采用CFD和ALE等數值計算方法,建立完整飛行器幾何外形的模型,得到了較高精度的漂浮特性結果。2013年,武漢理工大學的馬中帆等[31,148]基于LS-DYNA軟件中的ALE方法,采用罰函數接觸算法模擬飛機與水面的作用力,對水上飛機靜水面漂浮特性進行分析,并研究了不同重心位置對飛機漂浮穩性的影響,圖37所示為LS-DYNA中的數值計算結果,表明:重心位置前移導致機體下沉和姿態角增大,重心側向偏移對靜穩性影響較大,可能會發生側翻的事故。
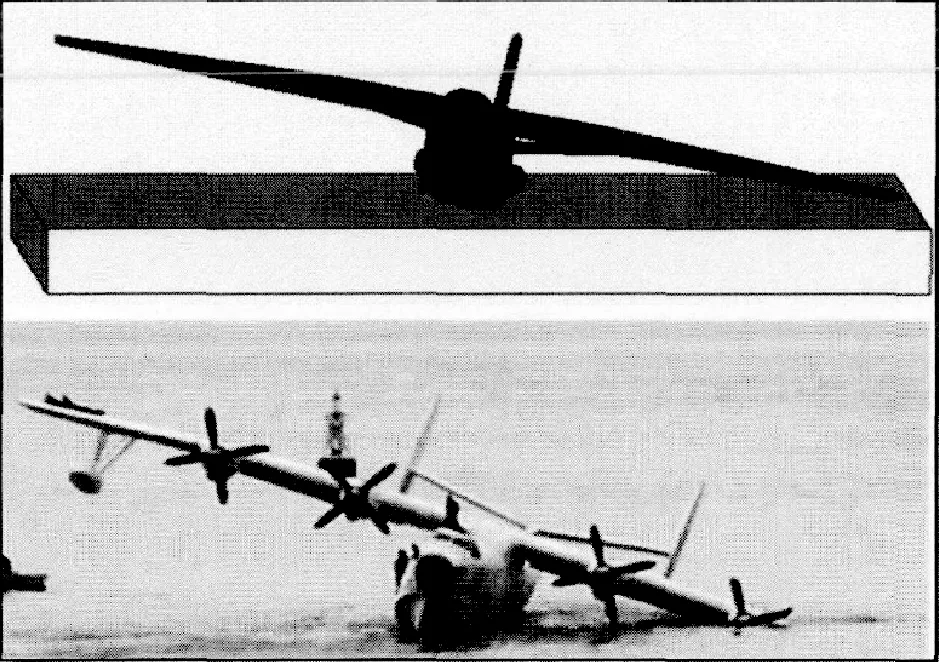
圖37 水上飛機漂浮特性數值計算結果[31]
2012年至今,南京航空航天大學的孫建紅團隊[108,149]和童明波團隊[150-152]采用LS-DYNA軟件對直升機漂浮穩性進行了深入研究。其中,侯斌[108]應用ALE算法計算了直升機的完整浮態(圖38);楊周[151]和李樂[152]等基于maxsurf軟件,通過等排水體積法研究了帶應急氣囊直升機的橫向靜穩性;同時,基于MATLAB和LS-DYNA軟件,通過單元壓力法研究了帶應急氣囊直升機橫向靜穩性,以及剛體和柔性體氣囊對結果的影響,結果表明:與排水體積法相比,ALE的穩性結果更加精確;帶柔性體氣囊的直升機漂浮穩性結果與試驗值更加吻合,如圖39[152]所示。

圖38 直升機漂浮完整浮態[108]
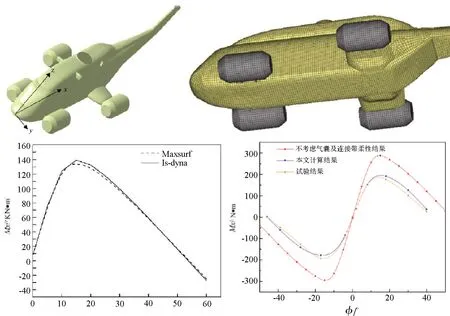
圖39 直升機漂浮特性數值計算模型和結果[152]
2020年,北京航空航天大學的劉沛清團隊[96]采用Fluent軟件模擬了水上飛機靜水面降落的全過程,漂浮階段從17 s開始,姿態角由4.32°最終降為2.71°,圖40為水上飛機漂浮階段的完整浮態的機體姿態、水線位置和機腹壓力云圖。

圖40 Fluent軟件模擬的水上飛機完整浮態[96]
3.2 飛行器水上漂浮的破艙穩性
基于剛體模型,研究飛行器的不沉性,即機身發生破損時的破艙穩性和漂浮時間。研究重點為:針對不同破艙位置和破艙形式,研究機體破艙進水的過程,判斷機體是否會發生側翻和下沉等事故,為乘員撤離和救援提供技術支持。
破艙穩性[137-138],也稱為抗沉性和不沉性,指船身或機身在破艙浸水后仍保持一定浮性和穩性而不至于沉沒和傾覆的性能。破艙進水一般分為3個階段[153-154]:瞬時進水(Transient Flooding)、持續進水(Progressive Flooding)和穩定階段(Steady State),圖41為破艙過程示意圖[153]。
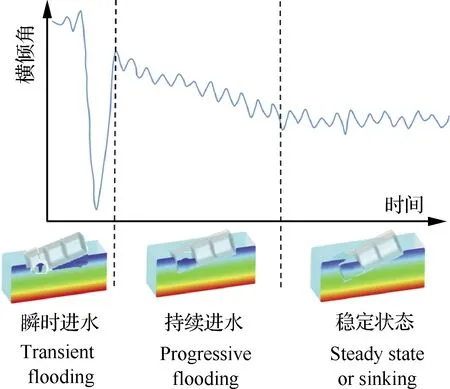
圖41 破艙進水的主要過程[153]
圖42[153,155]為破艙過程的3個階段涉及的物理問題。其中,第1階段涉及復雜的流固耦合現象[155],由于船體表面破損,水壓遠大于艙室內氣壓,在破損處產生噴水和飛濺等現象,破損的位置和尺寸極大地影響船體的運動,嚴重時可能導致傾覆事故;如果船體沒有傾覆,則進入第2階段,水體通過破損處持續進入其他艙室,產生復雜的水動力現象,如:自由液面流動、晃動和沖擊等[156],從而導致船體不穩定運動;當艙室內的進水量累積到一定程度時,即到達第3階段,此時如果重力和浮力相互平衡,則船體保持穩定漂浮狀態,即破艙浮態,反之,則船體沉沒。
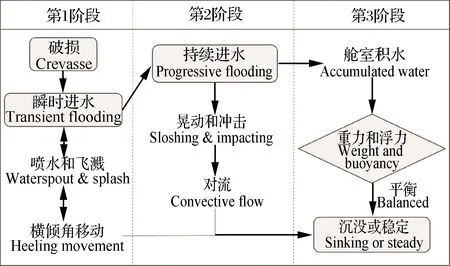
圖42 破艙進水的物理過程[153,155]
目前國內外關于破艙進水的研究主要集中在逐漸進水過程,其研究方法分為兩類[139]:流場域數值模擬方法,如基于RANS的CFD方法、基于勢流理論的淺水方程(Shallow Water Equation, SWE)數值求解方法和SPH方法等;以不沉性理論為基礎的簡化方法,也稱為準靜態方法(Quasi-Static Method)。
20世紀70年代,蘇聯學者馬涅采夫[38]對船舶的不沉性進行了大量的理論研究,隨后學者[138]在此基礎上總結了不沉性理論3個主要方面:靜力學理論、動力不沉性理論和概率論,并將其與數值計算方法結合,逐漸形成了以不沉性理論為基礎的簡化方法,用于研究時域內破艙模型的穩性變化和漂浮時間,該簡化方法的計算流程分為3個步驟[157-158]:
1)基于衡準計算方法,確定風浪環境參數和機體破損情況,包括[137]:確定性方法和概率論方法。前者為環境參數和漂浮參數,后者為隨機參數。確定性方法的研究成果較多且比較成熟,后來隨著SLOAS(Safety of Life At Sea)公約[159]的制定,研究人員逐漸重視概率論方法的研究,其主要策略為根據大量試驗結果建立概率模型,確保浮體在任意隨機的環境下具備不沉性。
2)基于靜力學理論,建立進水量隨時間變化的力學模型,主要有線性近似法和非線性逐步近似法。其中,線性理論基于一次近似原理,對實際飛行器外形進行簡化,以及內外水線和進水方式進行了假設,適用于飛行器傾角和吃水變化較小的情況;非線性理論用于研究飛行器傾角和吃水變化較大的情況,一般采用逐步近似法和圖解法進行求解。
3)最后基于動力不沉性理論,采用增加載荷法和損失浮力法,研究破艙穩性和浮態隨時間的變化。將進水量計入飛行器重力,即為增加載荷法計算飛行器浮態;將進水量記作損失的飛行器容量體積,即為損失浮力法。
目前,破艙穩性的簡化計算方法在船舶領域發展比較成熟,形成了大量的算法和軟件,如:maxsurf、COMPASS、Estab和NAPA等。國內外學者應用這些軟件進行了大量的研究[154,159-161],如:Pekka[154]基于上述簡化計算方法的3個步驟,針對逐漸進水過程進行了研究,與試驗進行對比(圖43),并指出:簡化方法能夠用于船舶進水問題時的工程預報;但是其計算結果低估了破艙進水第一階段的橫傾角,且由于無法考慮艙室內流,建議采用更加精細化的模擬方法。
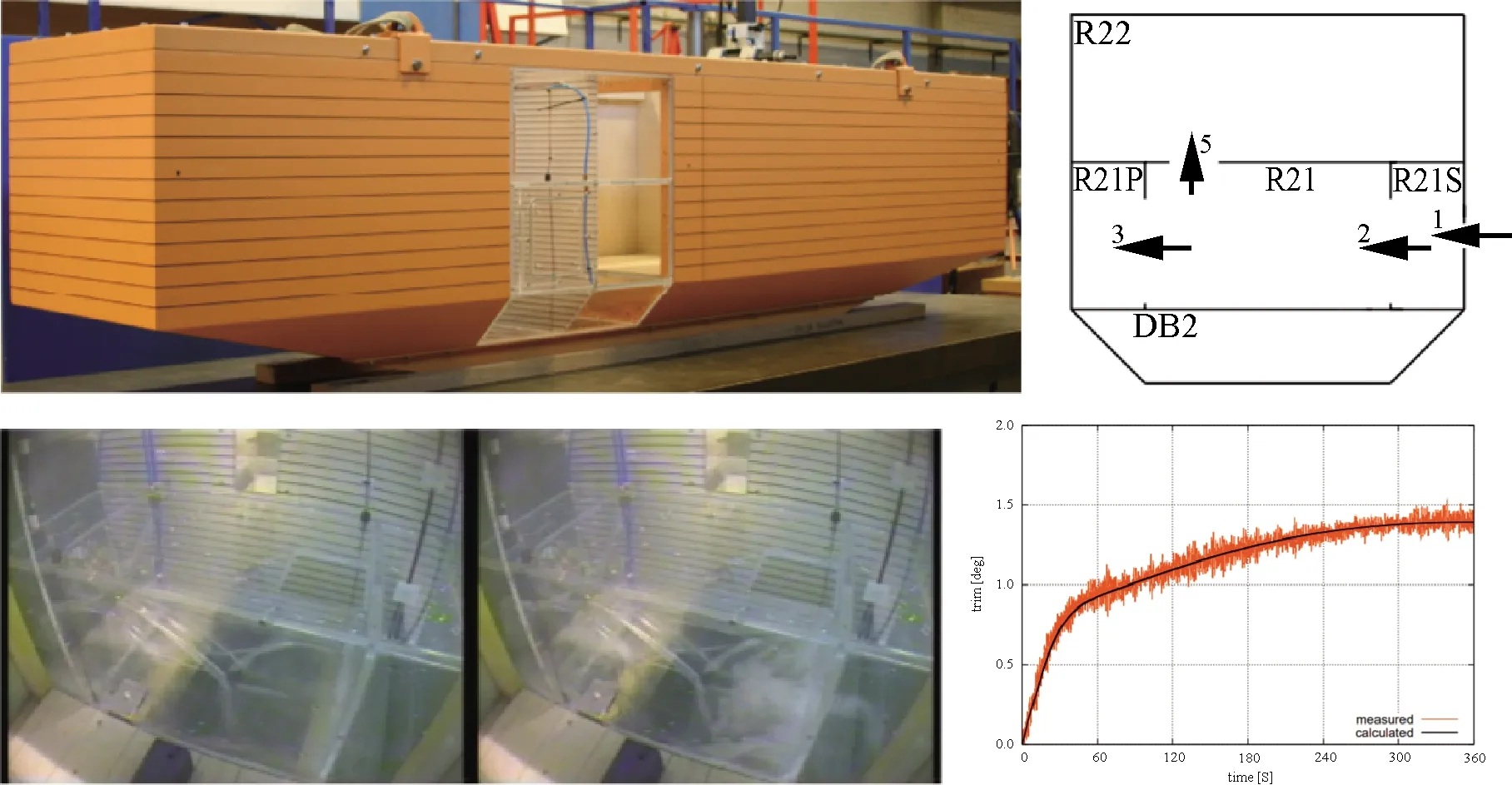
圖43 船舶破艙進水試驗和數值模擬[154]
上述基于不沉性理論的簡化方法和應用實例忽略了持續進水過程帶來的自由液面變形、水體晃動、噴濺和沖擊等問題(如圖44[159]所示),即沒有考慮艙室內部的進水流動問題[156-162]。另外,簡化方法無法考慮流體黏性,并對船體外形和內部空間布置進行了較大程度的模型簡化。因此,簡化方法存在無法精細化模擬破艙過程的缺點。
針對此缺點,基于流場域數值模擬的破艙進水計算方法逐漸興起,主要采用基于RANS的CFD方法和SPH方法。高志亮團隊[163]和Strasser[164]應用CFD-RANS求解器,張阿漫課題組[153,165]基于自編的SPH求解器(圖45),對靜水面和波浪水面情況下破艙進水的問題進行了詳細的研究。這些研究結果表明:試驗結果存在明顯的尺度效應(Scale effect);CFD能較好地模擬破艙后浮體的運動響應和非線性現象;破艙進水第3個階段(穩定階段)的內流和外流均比較平緩和穩定,此時的浮體姿態為破艙浮態,可以采用準靜態的簡化方法進行計算;破艙進水與波浪的耦合作用力帶來艙室貯箱晃動的問題;與靜水破艙相比,波浪對破艙穩性影響較大,浮體存在傾覆和側翻等安全性問題。
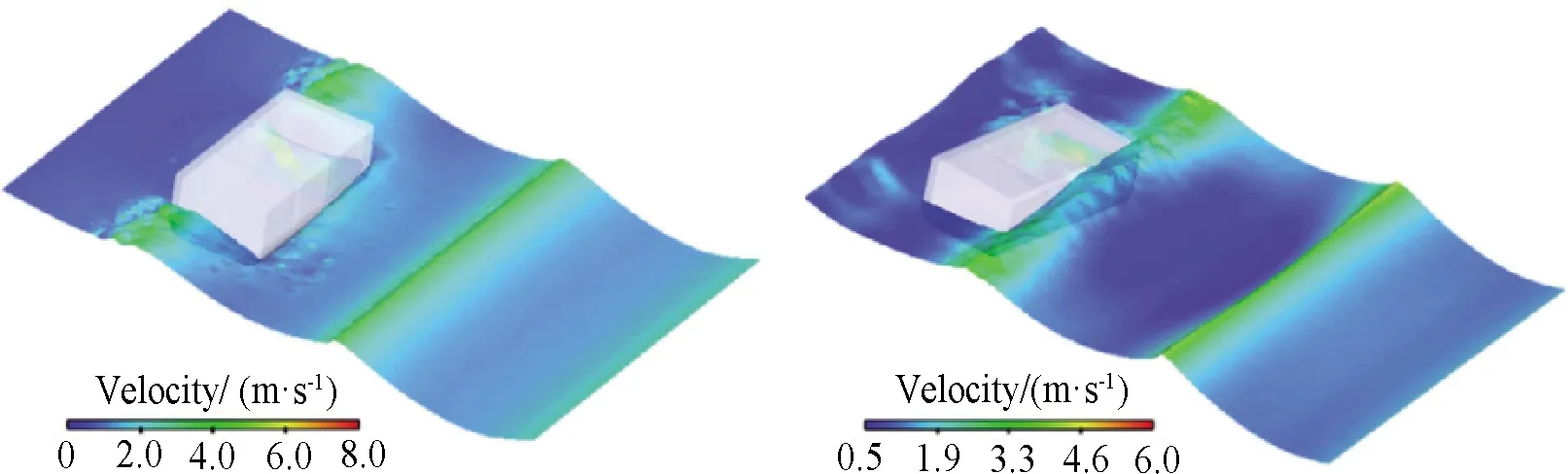
圖45 SPH方法模擬靜水面和波浪水面破艙進水過程[153,165]
相比而言,在飛行器破艙穩性研究方面,國外公開的相關研究成果較少,國內則主要以北京航空航天大學、南京航空航天大學和中國特種飛行器研究所等單位為主,均采用基于不沉性理論的簡化方法,近幾年才開始起步,存在研究手段單一、模擬結果粗糙和研究水平較低等缺點。
2015—2019年,中國特種飛行器研究所的王明振等[166-167]采用CAITA軟件的二次開發技術,基于阿基米德靜力學理論,通過增加載荷法研究了波音737-700飛機和某型固定翼飛機機身進水時的漂浮特性(圖46),分析了破損面積和重心位置對破艙穩性的影響,總結指出:破損尺寸和重心位置對飛機靜水面破艙漂浮特性影響較大,而重心高度的影響可以忽略;破艙進水量和速度與靜水面漂浮時間呈現負相關的趨勢,隨著漂浮時間的增加,飛機縱傾角增大,橫傾角減小。
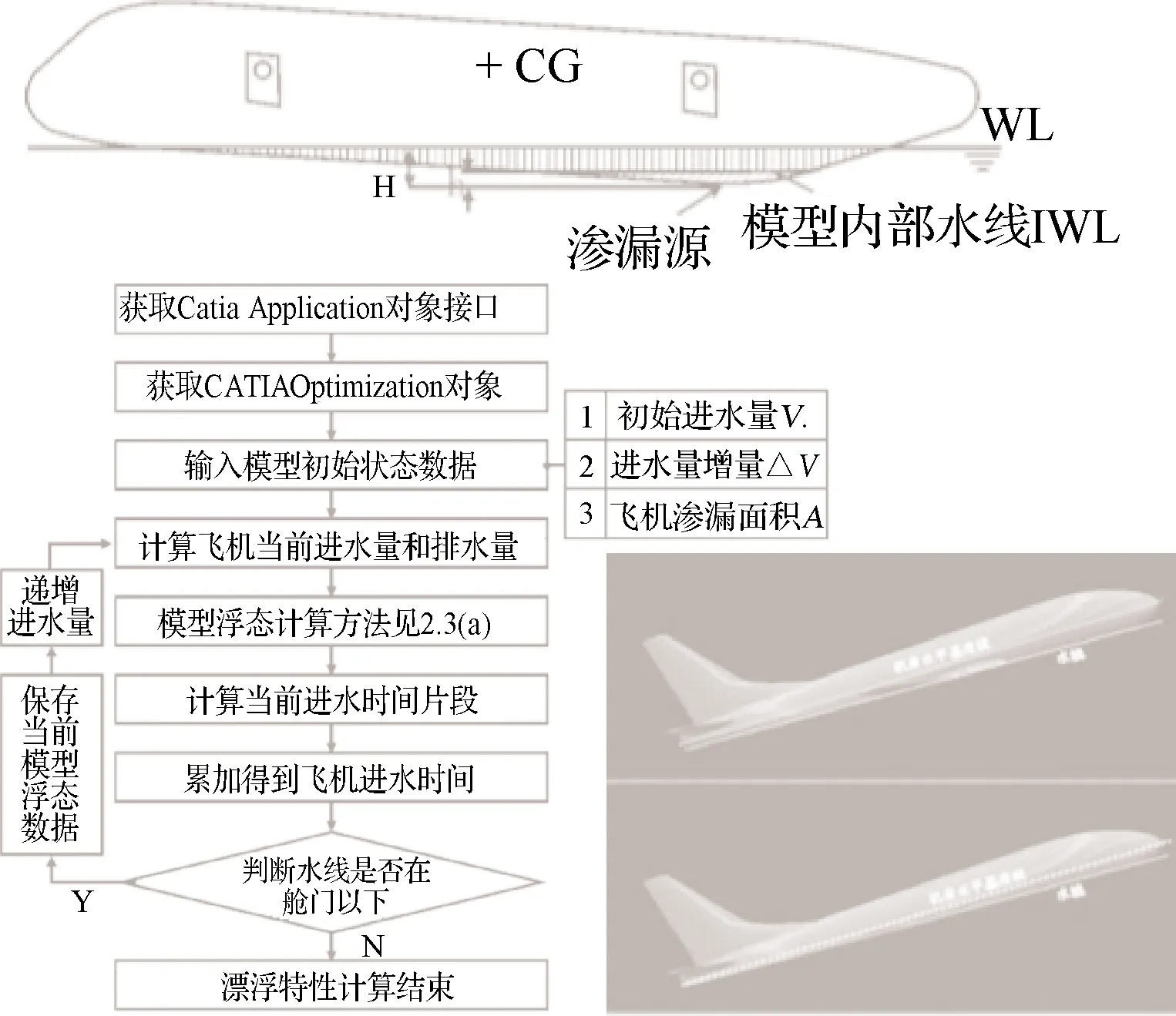
圖46 機身破艙模型和簡化方法計算流程[167]
2016年起,本文作者課題組以直升機為研究對象,通過損失浮力法建立平衡方程,分別采用了CATIA二次開發和MAXSURF軟件,得到了破艙后的浮態及穩態結果;通過準靜態的方法,基于Hypermesh軟件,求解了直升機多艙室發生進水時各艙內的進水情況。圖47為部分研究成果。
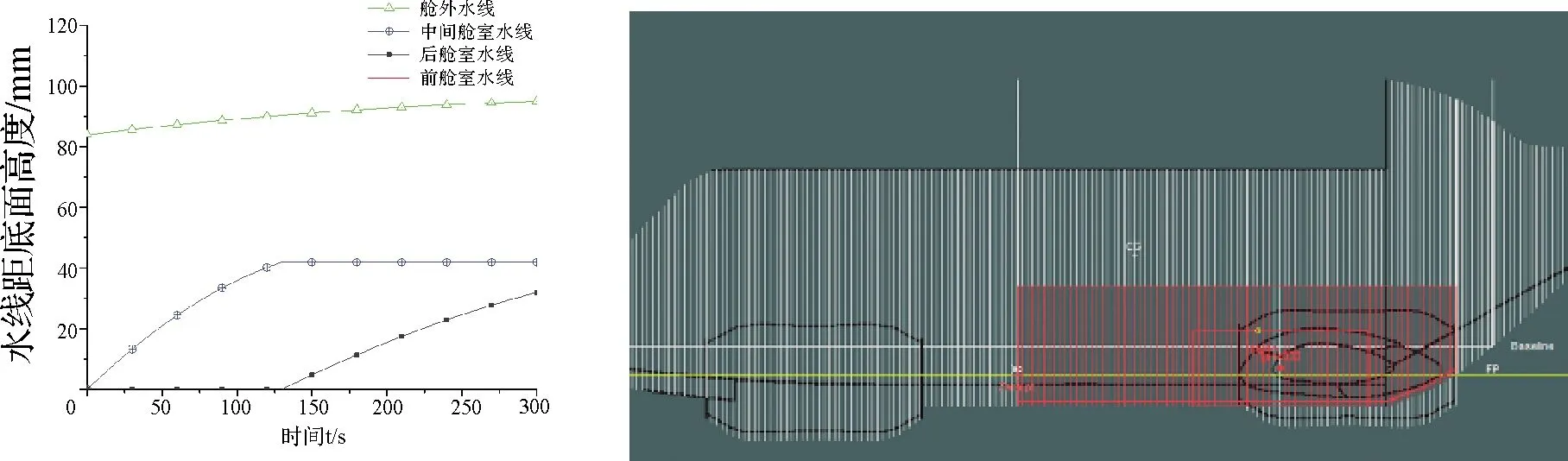
圖47 基于簡化方法的直升機破艙模型和計算結果
3.3 波浪對飛行器水上漂浮的影響
基于剛體模型,研究波浪對飛行器漂浮性能的影響,其研究重點為:預報規則波和不規則波情況下浮體的運動響應,分析波浪參數和波浪傳播方向對漂浮特性的影響規律,為飛行器海上漂浮的安全性分析提供技術支持。
目前,飛行器波浪漂浮問題的分析可以借鑒船舶領域的耐波性(Seakeeping)概念,一般指船舶在波浪中的運動和操控性能[168-169],具體的分析指標有:船舶的加速度和角加速度以及人員的乘坐舒適度和安全性等。1976年,St.Denis[170]提出了船舶耐波性的4個要素,其中強調了耐波性的分析需要預報和研究船舶在復雜波浪情況下運動參數的極限值。
國內外在此領域的研究方法主要有3類[34]:切片法[35]、非線性時頻域運動預報方法[37]和流場域數值模擬方法。
其中,切片法(Strip Theory)最早由美國學者Korvin-Kroukovsky于1955年提出[35],其實質與細長體理論和葉素動量源理論類似,主要策略為:根據某一時刻的波面情況,將三維流動簡化為二維流動求解出浮體各截面的受力特性,最后沿長度方向積分得到整體受力。目前,切片理論得到了進一步的完善,開始從規則剖面到任意剖面、縱向響應到多自由響應、二維到三維延伸,但是在預報不規則波的等強非線性漂浮問題時仍然面臨較大挑戰[171]。
非線性時頻域預報方法根據運動控制方程的不同的可以分為時域方法(Time-domain)[172-173]、頻域(Frequency-domain)[174]和混合時頻域方法(Hybrid Time & Frequency-domain)[175]。其中,時域方法以時間為尺度,通過時間步推進(Time-advanced)的方式求解時域運動控制方程,得到非定常結果;頻域方法以頻率為尺度,且假設初始流場和船舶的運動趨于穩態[176],通過求解頻域運動控制方程,得到頻率與浮體水動力系數的關系。非線性時頻域預報方法的主要計算步驟為:① 應用勢流理論[177]和Cummis理論[178]等簡化理論得到流場的速度勢;② 通過切片理論[179]、Green函數積分[180]等方式計算船舶的靜壓力、輻射力、繞射力等作用力;③ 應用達朗貝爾原理推導時域運動控制方程,或應用達朗貝爾原理和傅里葉變換得到頻域運動控制方程;④ 采用數值迭代方法求解線性方程組,得到船舶波浪情況的運動響應。
目前國內外關于船舶波浪漂浮穩定性和耐波性的研究主要采用非線性時域預報方法,Belenky等[181]對比了時域預報方法應用在二維、細長體(Slender ship)和三維船舶運動的計算效率和精度的區別(如圖48所示,紅色表示適用性較差,綠色表示適用性較好),并指出目前時域預報方法比較適用于二維和細長體船舶的波浪漂浮響應計算。
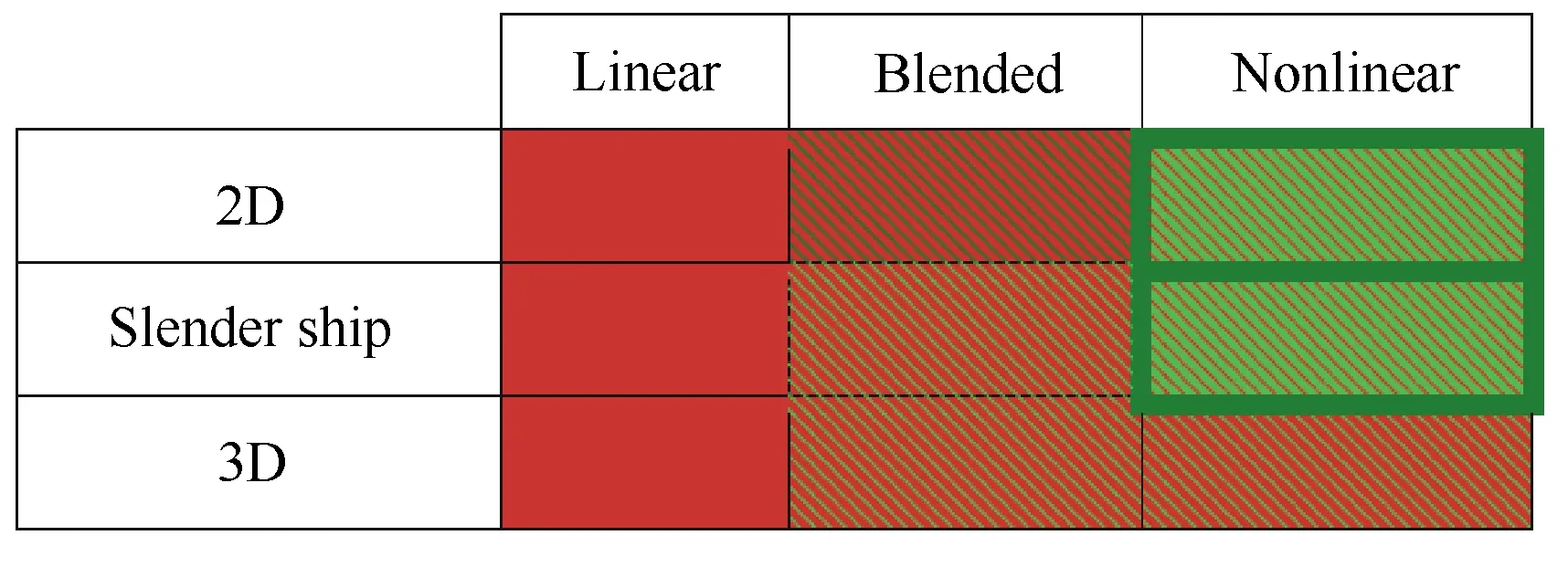
圖48 非線性時域預報方法用于分析船舶波浪響應的適用性對比[181]
切片法和非線性預報方法屬于理論與工程結合的方法,在船舶領域得到了廣泛應用,但是存在幾何外形簡化、忽略黏性和無法模擬流場等缺點;流場域數值模擬方法通過求解流體域控制方程,能夠得到機體受力、流場特性和監控特定點受力等精細化結果,主要采用ALE、SPH方法和RANS方法等。
上述3類方法目前在飛行器的波浪漂浮領域研究成果較少,但是在船舶與海洋工程領域得到了廣泛應用[172-175,182-186],如:Xia等[172]證明了非線性時域預報方法應用在漂浮預報的可行性。Perez等[182]詳細總結和對比了時域和頻域預報方法的理論、實現過程和應用的區別。Ma[183]、Kim[184]和Liu[185]等應用CFD求解方法,計算了浮體在波浪中的漂浮特性,并指出:與簡化方法相比,CFD方法能夠準確地模擬浮體在極端波浪的運動特性和非線性結構響應;傳統的非線性預報方法作為一種耗時較短、高效的工程方法,可以在設計階段使用。Neves[171]和Belenky[181]等在歸納總結了2000—2012年關于船舶穩定性的研究成果,重點闡述了船舶穩定性標準、耐波性分析、安全性分析和相關的CFD應用實例。Zullah和Lee[186]綜述了漂浮研究領域的CFD商業軟件和開源求解器,如:CFX、Fluent、COMSOL、EasyCFD、SHIPFLOW、CharLES、Comet、ProteusDS、InWave、WEC-Sim等,并指出CFD方法可能是目前研究浮體-波浪耦合和漂浮穩定性研究的最佳手段。
上述切片法和非線性預報方法在預報飛行器的波浪漂浮時存在模擬機身、浮筒和氣囊等浮體的困難,所以目前在飛行器波浪漂浮領域主要采用流場域數值模擬的方法。2014年,中航工業特種飛行器研究所的王明振等[187]對某型直升機進行了水上漂浮試驗,并采用ANSYS AQWA軟件模擬了規則波情況下直升機的橫搖曲線;并分析了波長對直升機漂浮響應的影響規律,結果表明:直升機在波浪中的橫搖角度幅值和角速度均隨著波長先增大后減小,如圖49所示。
圖49 基于AQWA軟件的某型直升機波浪漂浮數值模擬結果[187]
近年來,南京航空航天大學孫建紅課題組采用LS-DYNA軟件的ALE算法,建立了推板數值波浪水池,研究直升機的波浪漂浮問題,得到了較高的數值模擬精度;其中,侯斌[108]通過建立漂浮模擬模型(圖50),研究了直升機機身安裝氣囊對波浪情況下的漂浮穩性的影響規律,結果表明:機頭附近安裝氣囊有助于增強直升機波浪的漂浮穩性;機身后部安裝氣囊能增加橫傾穩性,但對縱傾穩性有不利影響。
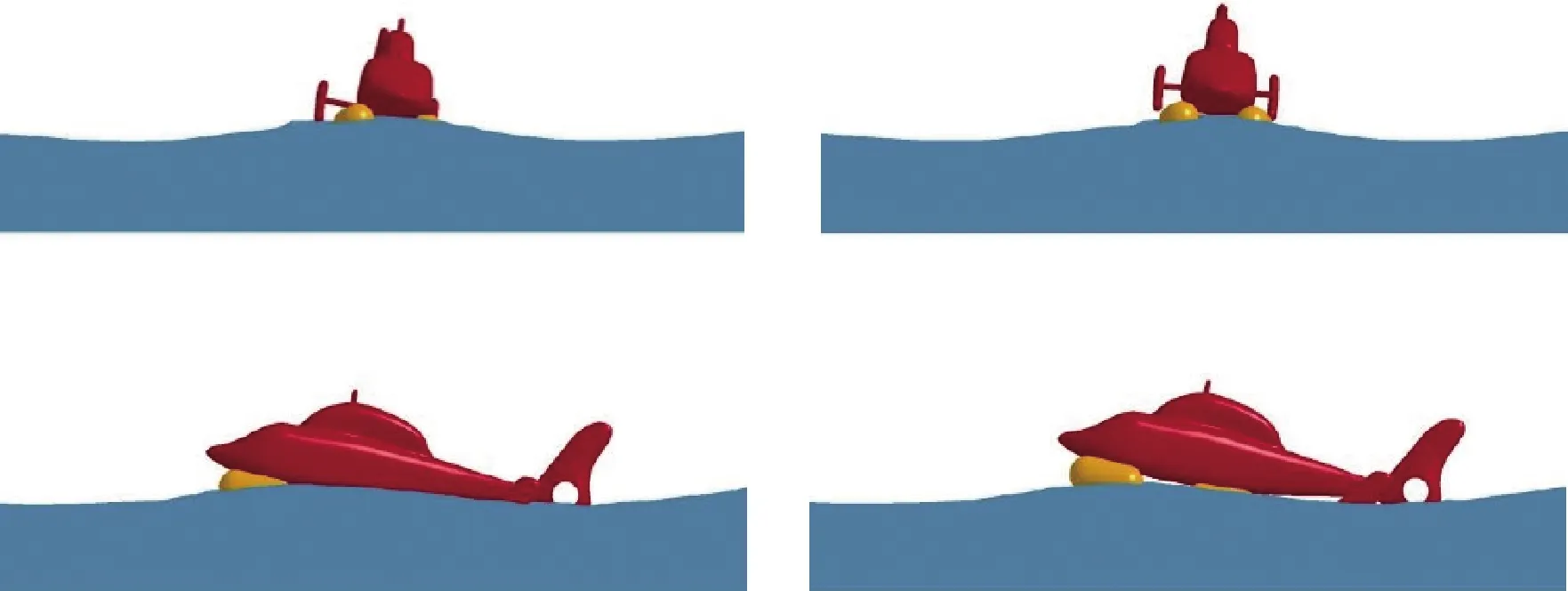
圖50 直升機規則波漂浮的ALE模型和模擬結果[108]
本文作者課題組近些年基于LS-DYNA的ALE方法和Xflow軟件的LBM(Lattice Boltzmann Method)方法研究了固定翼飛機和直升機的波浪漂浮問題(圖51[152]);其中李樂[152]重點研究了不同波浪等級對直升機漂浮的影響,結果表明:三級海況下的直升機規則波漂浮橫搖角度明顯小于五級海況的結果,且五級海況的水載荷更大,直升機達到穩定狀態需要的時間更長。
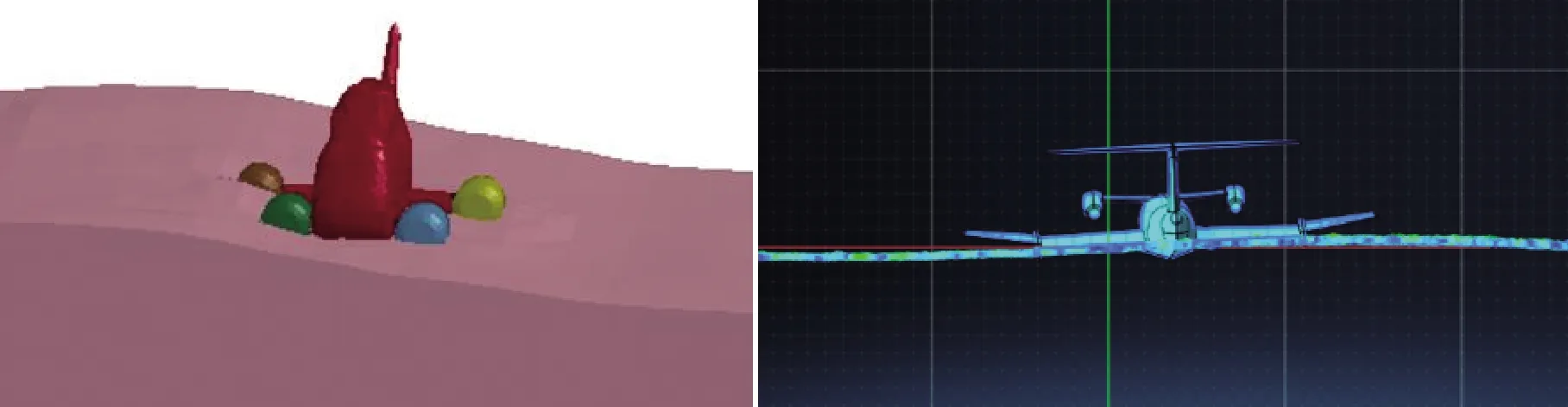
圖51 直升機規則波漂浮的ALE和LBM模擬結果[152]
2010年,ESI公司的Cartwrigh等[188]采用ESI公司旗下的Pam-Crash軟件,模擬了直升機氣囊的充氣過程,建立了通用直升機水上迫降的全過程SPH模型(圖52),重點分析了規則波浪情況下氣囊/緊急漂浮裝置對直升機漂浮穩定性的影響,其結果表明:沒有氣囊時,直升機在漂浮初期會發生翻轉,隨后,由于直升機不具備水密性,大量的水會通過艙門和舷窗快速涌入,導致直升機在觸水后的10 s之內迅速沉沒;與此相比,加裝氣囊能顯著提升直升機靜水和波浪情況的漂浮特性,使得直升機在任務段漂浮時具備足夠的安全性。
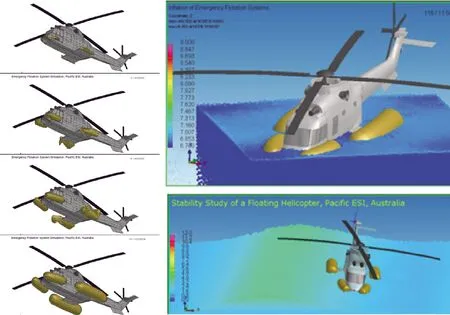
圖52 通用直升機氣囊充氣、靜水面和波浪漂浮的SPH模擬結果[188]
3.4 飛行器水上漂浮數值模擬總結與展望
目前國內外在飛行器水上漂浮領域研究成果總體較少,研究內容主要分為3部分:幾何構型參數對靜穩性的影響研究;破艙后浮體的破艙穩性和漂浮時間研究;波浪對漂浮動平衡特性的影響研。借鑒船舶領域的理論方法和豐富的成功經驗,對民機和直升機的完整浮態及靜水穩性進行了有限的研究,嚴重缺乏對破艙、波浪漂浮特性、動態平衡特性的深入分析和應用。
總體而言,飛行器漂浮的研究方法可以分為2類:簡化方法和流場域數值模擬方法。其中,簡化方法有:靜力學排水體積法、以動力學不沉性理論為基礎的準靜態方法、切片法和非線性時頻域運動預報方法;流場域數值模擬方法有:基于勢流理論的求解方法、基于Navier-Stokes方程的CFD方法(ALE、SPH、RANS、LBM等)。研究手段主要為采用各類商業軟件,如CATIA和SolidWorks等CAD三維造型軟件、NAPA、MAXSURF、ABAQUS、AQWA、LS-DYNA、FLUENT等,基于已有商業軟件的二次開發和自編求解器的研究方式較少。
簡化方法具有算法簡單、編程容易、計算快速和高效的優點,建議可以廣泛應用于飛行器漂浮外形設計階段、參數化建模與漂浮性能優化等工程問題上,但是存在幾何外形簡化、難以考慮浮筒和氣囊等浮體的影響、無法模擬破艙進水和波浪情況漂浮的全過程、忽略破艙后艙室內部布置和流動和無法模擬流場等缺點。與簡化方法相比,流場域數值模擬方法在分析漂浮時機體受力和運動響應、流場特性和參數監控、全時域的精細化結果等方面具有突出的優勢,其計算結果可以揭示飛行器漂浮的物理機理和流動特性,但是也存在算法復雜、計算耗時、開發算法和軟件的編程難度較大等缺點。
綜上所述,與國內外船舶領域的漂浮研究現狀相比,中國在飛行器漂浮的研究存在未解決的問題主要有:風浪流復雜環境飛行器的漂浮特性研究較少、針對固定翼尤其是民機漂浮的關注度不高、破艙漂浮研究水平較低、采用流場域模擬的方法非常少、研究手段單一和對國外軟件依賴度非常高等問題。針對以上飛行器水上漂浮領域的研究進展和國內外發展現狀,提出以下展望和建議:
1)基于已有的飛行器自由浮態和靜穩性漂浮研究成果,分別采用簡化方法和流場域數值模擬方法,進一步深入研究和探索更多飛行器構型參數對漂浮特性的影響規律,如浮體和氣囊的尺寸和安裝位置、機身外形和體積參數、機體重心位置等。
2)針對目前飛行器破艙穩性研究的嚴重不足,建議借鑒船舶領域的成果,從兩方面入手:基于動力不沉性理論的簡化方法,開發用于飛行器漂浮性能設計和優化的快速計算平臺;采用流場域數值模擬方法,研究飛行器內部艙室布置和體積、艙室內外氣壓差、破艙位置和尺寸等參數對飛行器破艙穩性和漂浮時間的影響,從而保證飛行器水上迫降導致破艙后具有足夠的乘員撤離時間。
3)基于目前已有的飛行器規則波漂浮的初步研究成果,分別從2個方面展開進一步研究:參考船舶領域切片法和非線性時頻域運動預報方法,完善飛行器風浪漂浮響應預報技術,建立較為精確的工程算法;采用流場域數值模擬方法,將水面情況從規則波到不規則波和風浪環境擴展,從而確保飛行器水上漂浮數值模擬的漂浮環境真實性,重點探索風速和波高、波長等波浪參數對飛行器漂浮特性的影響規律。
4)拓展飛行器漂浮的研究對象,重點分析民用客機、水上飛機、直升機、返回艙等,完善飛行器漂浮領域的研究范圍。
5)借助流場域數值模擬方法的能夠提供精細化結果的優點,采用FSI、RANS和LES等方法,從機理研究的角度出發,研究風浪情況下的破艙穩性和漂浮時間,重點分析和解釋水氣流場和結構沖擊響應特性,從而全面提升我國飛行器漂浮研究的整體水平。
6)基于船舶和飛行器領域的簡化算法,建立一套適用于預報飛行器靜穩性、破艙穩性、漂浮時間和動平衡特性的軟件平臺,并形成合理的飛行器漂浮性能評價體系。
7)加大各類飛行器全尺寸和縮比模型漂浮試驗的投入,鼓勵國內研究所和高校公開其詳細的試驗模型和研究成果,為飛行器漂浮數值模擬方法和開發和應用提供參考依據。
8)充分利用現有的研究成果,借鑒國內外船舶和飛行器漂浮領域的數值計算方法,分析各類算法的適用范圍和優缺點,按照從易到難的發展策略,從快速估算的簡化方法和精細化的流場域模擬方法2個層面,加大適用于飛行器水上漂浮研究的數值計算方法和軟件的研究和開發,從而提升我國在水上漂浮數值模擬領域的自主研發能力。
9)結合飛行器水上迫降召開學術交流會議的建議,融合飛行器水上漂浮的研究內容,形成廣義上的飛行器水上迫降國內研討會和國際會議,其研究范疇涵蓋飛行器水上迫降的4個階段:空中進近、水面撞擊、水上滑行和水上漂浮,從工程應用和機理研究2個層面,廣泛交流廣義水上迫降領域的氣動力、水動力和彈性體結構響應對飛行器結構完整性和乘客安全性的影響規律。
4 未來發展趨勢
針對現代飛行器水載荷結構完整性和安全性問題,調研和綜述了飛行器水上迫降和水上漂浮的國內外事故、試驗、最新項目和數值模擬方法,梳理了水上迫降和水上漂浮的定義、物理過程、指標、關鍵參數和數值模擬研究的國內外現狀,探討了中國在水上迫降和水上漂浮數值模擬領域的不足,在此基礎上指出了未來的發展趨勢和解決途徑:
1)精細化的數值模擬方法是飛行器水載荷結構完整性和安全性分析最重要的研究手段。隨著中國各類超算的部署,計算機算力已經不是數值算法和工程應用的阻礙,完全流固耦合、RANS、LES、DNS等高精度算法將會在未來廣泛應用于飛行器水上迫降和水上漂浮的工程應用和機理探究。
2)水動力、氣動力和結構變形是影響飛行器水上迫降和水上漂浮性能分析最重要的3個因素。復雜風浪情況時,水氣固三相耦合的動網格策略、數值建模和并行算法的研究與應用是制約飛行器水載荷結構完整性發展的最大阻礙。基于笛卡爾直角網格的重疊網格和多核MPI并行,將FVM、FEM與兩相流界面捕捉算法和流固耦合算法結合的方式可能是最有效的解決途徑之一。
3)基于簡化方法的快速計算平臺是飛行器設計階段評估水上迫降和水上漂浮性能最有力的工具之一。船舶領域的準靜態方法、切片法和非線性時頻域運動預報方法在快速參數化設計和性能優化方面具有突出的優勢,跨領域和學科的理論、算法和成功經驗將會為飛行器水載荷的研究提供強有力的技術支撐。
4)準確合理的水上迫降和水上漂浮性能評價體系的建立是飛行器設計和適航取證的重要保證。基于確保飛行器水載荷結構完整性和飛行安全的前提,改進和完善我國現有民航適航規章和軍用技術標準在飛行器水上迫降和水上漂浮方面的相關條款是未來最重要的任務之一。
5)自主軟件的研發和應用是我國飛行器水載荷研究領域的必經之路,對于整體提升中國飛行器設計和分析的自主研發水平而言至關重要。大力推進軟件自主開發的積極性,鼓勵開放的學術交流環境,加大算法研究與應用的科研投入,整合國內各類科研單位已有的自研代碼,借鑒國外成熟的商業軟件和開源求解器的模式,可能是未來健康合理的科研發展道路。
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
兒童故事畫報(2019年5期)2019-05-26 14:26:14
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
汽車工程學報(2017年2期)2017-07-05 08:13:02
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
