水下可見光通信關鍵技術研究
2021-06-16 16:42:24趙曉燕
電子技術與軟件工程 2021年4期
趙曉燕
(南京先進激光技術研究院 江蘇省南京市 210000)
在信息化、大數據時代的今天,傳統的水下有線通信、水下電波通信、水下聲波通信因成本高、速率低、體積大、多普勒效應顯著[1]、維護困難等一系列問題,已經不滿足發展需求。相反的,水下可見光通信技術嶄露頭角,發展勢頭良好。水下可見光通信是一種應用于水下的新型無線通信技術,該技術是采用高速脈沖調制解調方法,以可見光為載體,通過水下傳輸信息的通信方法[1,2]。該技術與水聲通信、電波通信等傳統的水下通信技術相比,具有通信速率高、信息容量大、傳輸距離遠、帶寬高、保密性好、體積小、功耗低、便于維護的一系列優點[3]。
然而,由于水下環境較大氣環境具有明顯的特殊性,水下可見光通信面臨著許多有待突破的技術難點[4,5]。
(1)由于光在水中的衰減較大,且不同水質衰減程度不一樣,因此可見光通信面臨著水下通信距離受限和不同水質下的環境適應性問題。
(2)光波在水下傳輸易發生光束擴散和多普勒效應,嚴重降低了光在水下通信的性能。
(3)水下信道復雜,光鏈路易受波浪、湍流、水中懸浮物、氣泡、浮游生物遮擋等突發因素的影響,進而使得通信的可靠性和穩定性受到影響。
(4)水下或者海下的通信設備由于難以接觸,維護時需要進行設備上浮,因此面臨維護難和維護成本高的問題。
基于上述原因,能夠克服復雜的水下信道環境,完成穩定、可靠、高速的水下可見光通信的關鍵技術亟待突破。
1 水下可見光通信技術的基本原理
水下可見光通信技術的基本原理[1]如圖1 所示,分為發射端、水下信道、接收端和水密空腔殼體四大部分。
發射端主要涉及編碼技術、調制技術、光源驅動電路設計和發射光學系統設計。發射端需選用抗信道干擾能力強的編碼方式和適合信道特性的高效的調制算法,對發送終端發送的信息進行電調制,然后經過高速驅動電路來驅動光源發光,完成電信號到光信號的轉化,再通過發射光學系統完成光束準直,提高光束特性。
水下信道主要涉及水下信道建模技術。攜帶調制信息的光信號經過水下信道傳輸的過程中,需考慮水環境對光信號的吸收、散射,以及氣泡、湍流等突發因素對光信號的干擾。健全、科學的水下信道建模可以充分預估各種突發因素的影響,進而指導系統設計,提高系統通信的可靠性。
接收端是發射端的逆過程,主要涉及接收光學系統設計、小信號放大技術、解調技術和解碼技術。首先接收光學系統中的光電探測器接收光信號,并將光信號轉化為電信號,其次對電信號進行放大、干擾濾除等一系列預處理操作,最后對數據進行有效的解調和解碼,解調和解碼分別是調制和編碼的逆過程。
水密空腔殼體用于放置發射端的光、電元器件和接收端的光、電元器件。由于水下尤其深海的特殊性,水密空腔殼體需要充分考慮機械結構領域的水密、耐壓、耐腐蝕、散射、重量、材料等問題。
綜上所述,水下可見光通信技術涉及到光、機、電各個領域,各部分獨立模塊的關鍵技術突破和各部分模塊間的相互配合是實現可見光通信穩定可靠的重要基礎。
2 高通信速率關鍵技術
由于光在水中的傳輸速率可以達到Gbps 的量級,因此通信速率高是可見光通信技術較聲波等傳統水下通信技術具備的最明顯的優點。實際上,由于關鍵技術的不成熟、硬件設備的制約,水下無線光通信的通信速率一直難以與理論期望值相匹配。硬件響應速率、接口吞吐率以及調制、解調技術往往是水下通信系統通信速率的主要制約因素。

圖1:水下可見光通信原理
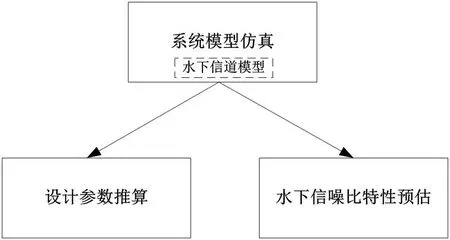
圖2:軟件仿真流程圖
硬件響應速率主要是指通信系統中光學、電學設備對傳輸信息的響應速率。為了突破硬件響應速率的制約因素,發射端可采用高速光源驅動電路和并聯電流驅動架構,調制帶寬高達200MHz;接收端可采用高靈敏度光電探測器PMT,較其他光電探測器具有響應速度快的明顯優勢。
接口吞吐率主要是指發送/接收終端與編碼/解碼之間的接口速率。為了突破接口吞吐率的制約因素,可采用千/百兆網口,吞吐率可達1Gbps/100Mbps,接近線速;對于接口速率要求更高的應用場景,還可以采用USB、PCIE 等高速接口。
調制解調技術是水下可見光通信技術的“軟實力”,是影響通信速率的關鍵因素之一。為了突破調制解調技術對通信速率的限制,一方面,可以采用基于FPGA 的高速信號處理電路和多路并行處理軟件架構技術來實現,如此,既能充分發揮FPGA 的優勢,又能提高調制、解調、編碼、解碼等數字信號處理環節的實時性和處理速度;另一方面,可以選用高效的調制解調算法,常用的水下調制解調算法有開關鍵控法(OOK)、脈位調制法(PPM)、正交頻分復用法(OFDM)。OFDM 的調制速率可以達到Gbps 量級,OOK 和PPM 的調制速率可以達到kbps 到Mbps 的量級,調制速率越高,對應的通信距離越短。由于OOK 和PPM 各有優缺點,因此還可以采用改進的OOK 和PPM 融合的調制解調算法,既能發揮PPM 功率利用率高的優點,又能解決OOK 抗干擾性差的問題。
3 遠通信距離關鍵技術
水環境對光信號的吸收、散射是影響水下可見光通信技術通信距離的重要客觀因素,盡管我們無法改變水環境,但仍然可以在系統設計階段通過增大光功率、減小水下信道衰減、提高光功率轉化效率的關鍵技術來提高通信距離。
增大光功率的技術包括發射端采用高功率、多光源技術保障發射端的大功率;還包括接收端采用可探測微弱信號的高靈敏度探測器和小信號放大技術,降低對接收端最小功率極限的要求。
減小信道衰減的方法可以通過選擇水下衰減最小或最適宜當前水質的光源波段。由于藍、綠光波段在海水中衰減最小,因此藍、綠光是國內外目前水下可見光通信技術中最常采用的。
提高光功率轉化效率,可以在發射端采用光功率高、調制帶寬高的LD 作為發射光源,接收端采用小信號放大技術和抗干擾性強的解調算法,降低系統對接收端信噪比的要求。
4 高可靠性關鍵技術
可靠性是衡量通信系統的重要指標,如果通信系統的可靠性差,將會造成通信信息的誤碼、丟失,甚至造成通信的失敗。湖、海、河等水下環境較大氣環境具有特殊的多樣性、復雜性、突發性,使得水下可見光通信的可靠性一直都是水下通信系統面臨的嚴重挑戰。要提高水下可見光通信的可靠性,一方面要求通信系統具有不同水質下的環境適應性,另一方面要求通信系統具有面對海洋生物、湍流、氣泡等突發環境的抗干擾能力。由于水下可見光通信系統涉及光、機、電各個領域,因此,系統可靠性也涉及到各領域設計的可靠性。
光學系統的可靠性主要考慮光學元器件選型、光路準直、光源穩定性、鏡片選擇等因素。機械系統的可靠性主要可以通過采用力學性能穩定性分析(如耐高壓)、熱量分布分析等仿真技術指導結構設計和散熱設計。電學系統的可靠性主要考慮軟件設計和電路設計兩方面的可靠性因素。電路設計的可靠性主要考慮電磁兼容、電磁屏蔽,溫漂特性、噪聲特性等。這里著重介紹保障軟件可靠性的關鍵技術。
軟件可靠性需要做到理論與實踐的相結合,理論主要指設計前的理論仿真和建模,實踐主要指水下通信的調試與測試,充分摸底信道特性和系統特性。
設計前的系統仿真技術需多維度分析各個影響因素,進而指導設計階段按最科學的方法保障可靠性。系統仿真流程如圖2 所示:首先進行健全的系統仿真模型建立,仿真模型包括構建發射端信息源、發射端、水下信道模型、接收端、接收信息整個鏈路。其中水下信道模型建立尤其重要,需考慮不同水質(清澈、渾濁等),不同應用水域下(深海、淺海、港口等)的水對光的影響;其次根據設計階段需求的通信距離、通信速率、通信角度、誤碼率等參數推算通信系統的設計參數,推算的設計參數主要包括光源發散角、接收視場角、接收孔徑等,上述參數可以進一步指導元器件的選型;與此同時,通過水下信道的建模,設計師還可以明晰不同水域下的信道信噪比特性,用以標定接收端解調階段的噪聲基底,這對系統具備自適應不同水質環境能力具有重要作用,是提高系統可靠性的關鍵。
設計后的水下通信系統的調試與測試環節可以實際摸底系統特性和水下信道情況,是設計前系統仿真環節的反驗證。該環節需要摸清當前水質下的噪底特性、通信設備固有特性以及通信系統所能達到的最長通信距離、最短通信距離、最大通信開角、自干擾現象,通過實測數據進一步修正設計前的系統仿真。
5 結束語
本文系統的分析了水下通信技術的基本原理、主要系統構成、重要技術指標以及保障各項重要技術指標的關鍵技術。通過采用上述關鍵技術,可實現通信速率范圍1Mbps~100Mbps、通信距離范圍5m~150m 的高速水下可見光通信系統,試驗證明,該系統能抵御氣泡、湍流等各類復雜干擾,能夠在高光、渾濁等惡劣環境下有效通信,穩定性強、可靠性高。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25