基于機器視覺的車燈模組照度智能監測方法
2021-06-16 23:49:58盧印舉張偉豪張智華趙星萬藝菡
電子制作 2021年6期
盧印舉,張偉豪,張智華,趙星,萬藝菡
(鄭州工程技術學院信息工程學院,河南鄭州,450044)
0 引言
汽車的車燈照度的相關配置,會影響駕駛員的視線,進而影響到駕駛員的生命安全。根據國際車燈模具照度標準,不同的車型應由指定的光型構成,因此如何確保汽車照度滿足國家車輛生產標準將成為未來相關產業的研究重點[1]。但目前國內車燈生產廠家的車燈檢測系統的照度監測精度不足以滿足現實使用需求[2],為此,在對車燈模組照度的智能監測中,引入機器視覺技術。希望通過本文對此課題的研究,在確保車輛駕駛員人身安全的同時,提高汽車照燈的生產標準,以此為產業的相關研究提出技術層面指導。
1 機器視覺技術的應用
機器視覺技術是利用計算機設備對人類視覺進行模擬,使獲取事物的信息更為客觀化。在完成數據提取的基礎上,使用計算機輔助監測行為,對數據信息加以處理,從而發揮信息的最高應用價值。機器視覺技術應用于各行各業,如機械智能化生產、汽車制造生產、印刷行業、醫療產業等,充分發揮出自動化程度高、精度高、速度快、支持大批量信息且可實現遠程終端管理等優勢[3]。其常規化工作流程如圖1所示。
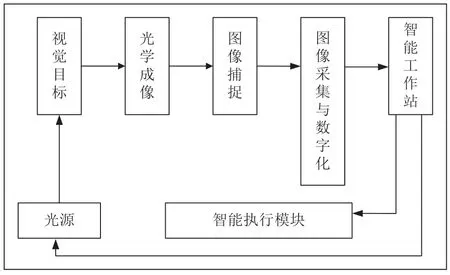
圖1 機器視覺技術的應用流程
綜合機器視覺技術具備的顯著優勢,將此技術應用于車燈模具照度監測研究中。
2 基于機器視覺的車燈模組照度智能監測方法
■2.1 基于機器視覺車燈模組照度邊緣提取
傳統的車燈模具照度智能監測行為中,由于可實現的監測距離較短,并且其中應用了過多的微分計算,導致監測時必然會受到外界多種噪聲或干擾因素的影響。為了避免在對照度進行智能監測中將噪聲識別為監測點,本章引入機器視覺技術,對車燈模組照度圖像的邊緣信息進行提取[4]。可將邊緣信息的提取過程劃分為邊緣數據的定位與殘缺信息的修補兩個步驟。此過程中考慮到車燈模具光照強度受到的外界干擾源較多,因此利用機器視覺提供的圖像模式識別技術,進行信息算子的卷積處理。由于Sobel 算子信息只有水平與垂直兩個維度,為了保證對光照強度邊緣信息采集的有效性,在獲取工業化相機拍攝的圖像后,應拓展信息的傳輸模板(通常情況下為8 個方向的模板),并將圖像中的每一個邊緣點進行模板卷積對照。輸出模板不同方向的最大值,記錄邊緣值的對照方向,并將此信息傳輸到上位機。
為了確保獲取的照度圖像在傳輸中的穩定性,因此本文選擇將以太網作為信息傳輸與實時通信的支撐,完成對車燈模組照度邊緣圖像的有效傳輸[5]。由于不同類型的車燈磨具在生產中的工藝與標準不同,為此獲取的邊緣圖像信息中可能存在部分無用信息,包括環境噪聲等。為了方便后續對光照強度的準確識別,利用計算機科學技術,在圖像邊緣上尋找每一邊,邊緣線中存在的孤立點與端點,將這些點作為修補信息的初始點,用于提高獲取信息的質量。在修補圖像信息的過程中,根據車燈模具的輪廓,對其進行思維跟蹤。綜合上述分析,采用機器視覺提供的多種功能,對獲取邊緣圖像進行修補與平滑處理,此過程可用如下計算公式表示。

式中,wx,y表示為完成修補與平滑的邊緣圖像結果,其中x 與y 分別表示橫向與縱向信息;q表示為信息傳輸模板;i 與j 分別表示為模板中信息的對照方向;d()?表示為使用機器處理后的邊緣信息;K表示為車燈模具相關參數。根據上述計算公式,完成對車燈模組照度邊緣信息提取,得到去除相關干擾噪聲的照度信息。
■2.2 亞像素照度邊緣曲線擬合
結合機器視覺技術,完成對車燈模組照度邊緣提取后,對亞像素照度邊緣曲線進行擬合。利用逐步查詢方法,完成對其相應照度邊緣的匹配,記錄兩組圖像當中的相對位移變化情況。通常情況下,可選擇左右跨度分別為1.2 個像素的圖像,將其與樣本子區域對應位置進行相關計算,在計算過程中,保證包含10 個亞像素目標子區域。結合相關系數計算的特性,當分布在真實匹配范圍內的目標子區域,與樣本子區域之間的相關系數具備如下規律:當距離真實點越遠時,則其相關系數的數值越小;當距離真實點越近時,則其相關系數的數值越大。在一組相關系數當中,以真實匹配點作為區域中心點,進行二次曲線分布。選取多個亞像素目標區域和樣本子區域的相關系數,完成二次曲線擬合,再對其進行導數求解,得出曲線的最大值,將通過計算得出的最大值所在區域點作為匹配點。
在確保其精度滿足擬合要求的情況下,降低運算的次數,并選擇其中五個較為合理的匹配點擬合二次曲線。進一步推導出亞像素照度邊緣相應的一階導函數:

式中,y1、y2分別為根據最小二乘法推導出的擬合曲線系數;A 表示為擬合曲線坐標。根據相應的二次導函數,通過其正負值,判斷其最大值和最小值。由于相關系數的分布具有一定的特殊性,通常情況下曲線圖像均包含最大值,而不包含最小值。因此,滿足B'(A) >0 條件。根據上述計算結果求得亞像素點的目標子區域相對應的距離值,完成對亞像素照度邊緣曲線擬合。
■2.3 車燈模組照度自動化監測
利用Mfiso48 計算機編程工具,對車燈模組照度進行自動化監測,設置其照度邊緣曲線擬合數據以異步串口通信方式進行傳輸,波特頻率為1600bps。通過多個數據串口完成對其照度參數的接收,以及對上述照度邊緣曲線的提取。在顯示屏幕當中通過點擊照度按鈕,將程序中對照度監控的窗口打開,并在上位機顯示器當中對當前車燈模組照度的狀態進行實時檢測,并同時對其相應的元件閉合或斷開狀態進行檢查。根據其相應的傳輸數據,在SMT 控制端當中發送相應的監測質量,等待上位機的反饋信息。若上位機中顯示的B'(A) 數值小于或等于零,則說明其照度不滿足運行要求,需要重新設置新的控制指令。若上位機中顯示的B'(A) 數值大于零,則說明車燈模組的照度滿足運行要求,可繼續通過該控制指令對其照度進行控制。
3 對比實驗
■3.1 實驗準備
構建實例分析,實驗對象選取某車燈模組。針對其照度進行智能監測。本次實驗硬件設施包括:型號為MKLOPA25835890 的上位機。此次實驗環境設置的具體內容及參數為:任務最大迭代次數為200,任務布置器2,虛擬主機資源數量860,任務資源消耗量30,物理主機地理距離20,宿主更新0.2569,網絡權重系數0.3575。
在保證實驗具有有效性的前提下,選擇同一個測試指標進行,實驗的內容為測試本文監測方法與傳統監測方法之間的照度智能監測查準率。照度智能監測查準率能夠表明監測信號中所監測得出的有效信息在信息總量中的占比,照度智能監測查準率越高證明該監測方法對于車燈模組照度智能監測精度越高。在此次的實驗中,首先使用本文基于機器視覺設計監測方法智能監測車燈模組照度,利用Heapchyer 軟件記錄測得的照度智能監測查準率,設其為實驗組;再使用傳統監測方法智能監測車燈模組照度,同樣利用Heapchyer 軟件記錄測得的照度智能監測查準率,設其為對照組。本次實驗將監測距離設為5m~50m,以每5m 為一個節點,共進行10 次實驗。針對Heapchyer 軟件測得的照度智能監測查準率,記錄實驗結果。
■3.2 實驗結果與分析
在上述設計的實驗環境中執行此次實驗,并輸出對應的實驗結果,整理其內容如表1 所示。
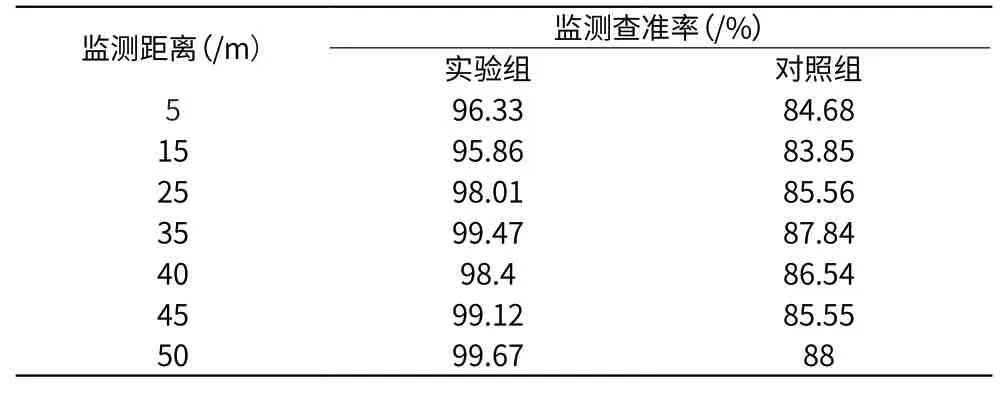
表1 實驗結果對比表
通過表1 可知,在相同的監測距離內,本文設計方法在對車燈模組照度進行智能監測過程中,其監測結果的準確率平均達到了98.12%,明顯高于對照組的監測準確率,平均為86%。基于上述實驗結果數據,得出本次實驗的最終結論:相比傳統的智能監測方法,本文設計的基于機器視覺的車燈模組照度智能監測方法實際應用中,效果更為顯著,因此可以說明所設計的智能監測方法更具有現實推廣價值。
4 結束語
為了解決傳統智能監測方法存在的查準率低的問題,本文基于機器視覺技術的應用,從提取車燈模組照度邊緣信息、擬合亞像素照度邊緣曲線與自動化監測三個方面,開展了車燈模組照度智能監測方法的設計。并采用設計對比實驗的方式,對本文提出方法進行了驗證。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中華手工(2017年2期)2017-06-06 23:00:31
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
中外會展(2014年4期)2014-11-27 07:46:46
