一種基于神經網絡的多智能體建模技術
2021-06-16 14:21:42張增輝唐平馬若雯
電子技術與軟件工程 2021年5期
關鍵詞:模型
張增輝 唐平 馬若雯
(中國電子科技集團公司電子科學研究院 北京市 100041)
在過去的二十年中,人群多智能體建模主要有兩種方法:社會力模型和元胞自動機模型。前者是連續的,后者是離散的,通常情況下社會力模型仿真過程中需要進行更多的計算。隨著計算機計算水平的增加,社會力模型因其連續性的特點逐漸成為主流[1,2]。社會力模型的最大特點是其普適性,它可以輕松應用于任何場景,但其微觀行為和宏觀統計數據與真實情況存在一定差距。
目前,越來越多的研究開始專注于使用神經網絡來進行人群運動仿真。Ma 和Lee[3]提出了一種基于人工智能的人群運動仿真方法,該方法需要通過馬路上的監控收集大量的微觀行人運動數據,并通過一個神經網絡來學習,他們的結果顯示該神經網絡可以模擬行人通過人行橫道時的微觀行為。與此同時,Alahi[4]利用循環神經網絡完成了在指定區域內行人軌跡的預測工作,還有許多研究[5-9]表明神經網絡模型比社會力模型更能準確的模擬行人行為,但普遍存在場景約束。
本文所設計的行人神經網絡模型將在滿足多場景仿真要求的同時,力爭在準確性方面超過社會力模型,這主要取決用于訓練的數據集的質量。
1 人工神經網絡的搭建
根據社會力模型,行人在t 時刻的速度變化由公式(1)-(4)得到:
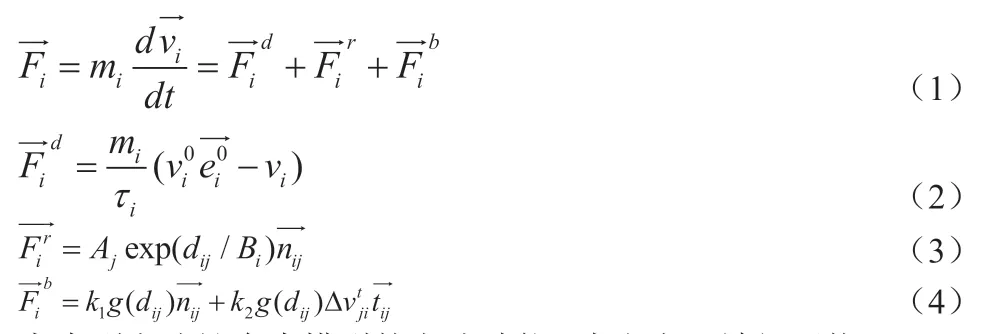
考慮到上述社會力模型的上述功能,本文人工神經網絡(ANN)的輸入設計如下:
(1)本文由A*算法計算出的期望的運動方向由表示。這個運動方向可以代表目標的期望方向和避開障礙的計劃方向。它代表
(3)采用數組W,如公式(5)所示,來存儲主體人物周圍的人群信息。為了實現模型的計算復雜度和保真度之間的平衡,考慮五個最近的鄰居來計算 的相互作用力。如圖1 所示:
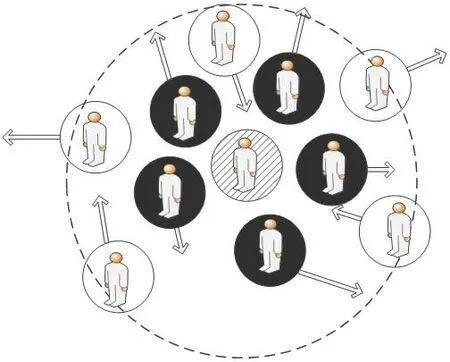
圖1:相互作用力計算示意圖
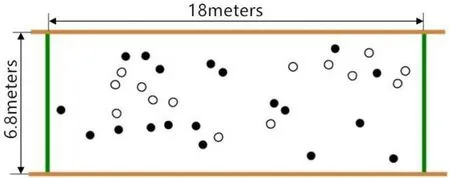
圖2:對流現象仿真圖

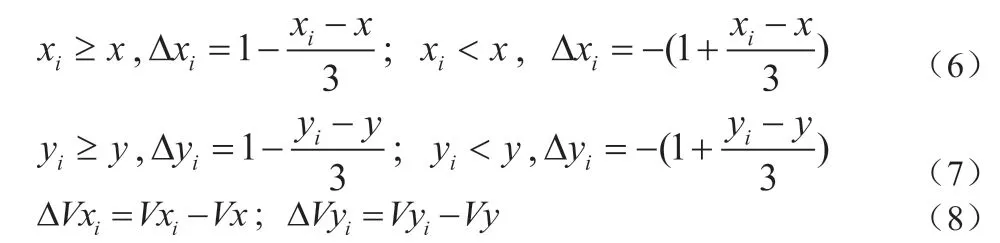
W 是20 個元素的相鄰數組。因為人工神經網絡需要固定數量的輸入,但是鄰居數量可能少于5 個。為了解決這個問題,本文使用歸一化的 和 來表示該行人與其鄰居之間的相對位置。當鄰居靠近主體時, 和 接近1。當鄰居數目小于5 時,相應空余的為0。W 數組內數據的計算公式如公式(6)-(8)所示。
2 數據采集與網絡訓練
2.1 數據采集
本文首先利用仿真模擬行人典型行為,并采集數據來驗證行人神經網絡的有效性。針對典型行為進行的實驗如下。

圖3:圓形障礙物堵塞
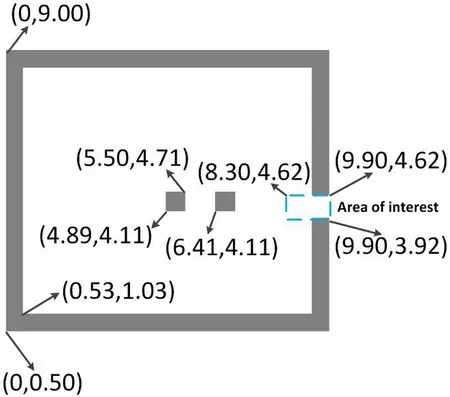
圖4:驗證場景示意圖
2.1.1 對流現象
當人群朝著相反的方向前進時,人群會自行組織創建不同的通道。從圖2 可以看出行人被分為黑白兩種顏色,分別從兩邊的入口進入。實驗中設置行人生成速率為1 人/秒,測試持續時間為100 秒。
2.1.2 擁擠堵塞
假如在緊急情況下需要從出口逃生,大密度的人群往同一個狹窄出口移動,行人不會自覺排隊,那么行人就會在出口處產生如圖3 所示的拱形堵塞。實驗中設置疏散行人總數為100 人,障礙物尺寸為矩形2 米*2 米,圓半徑為1 米,門寬為1.3 米。
2.2 神經網絡的訓練
本文中人工神經網絡輸入單元的數量是22 個,輸出單元的數量是2 個。該網絡有兩個隱藏層,都有60 個神經元,主要學習方法是反向傳播(BP),它將預測結果與實際數據之間的差異進行反饋,并調整權值以達到誤差的最小化。該過程被重復許多次,直至迭代次數達到預定值,或者均方誤差(MSE)下降到某個閾值以下。本文中迭代次數的上限為1000次,均方根RMSE誤差的閾值為0.05。在所提出的人工神經網絡中,90%的樣本(36573)作為為訓練組,10%為作為測試組。最終,本文所設計的人群神經網絡模型的訓練均方誤差(MSE)為0.050504,測試均方誤差為0.06179。
3 仿真與神經網絡驗證
驗證場景為房間疏散場景,如圖4 所示。
本文基于驗證場景對人工神經網絡模型進行了測試,測試效果如圖5、圖6 所示。左圖為行人的運動軌跡圖,右圖為仿真進行到5s 時的截圖。
從圖中可以看出,神經網絡模型與社會力模型相比,人與人之間的相對距離更加真實,不現實的軌跡波動更少。通過計算每1/15s 步長內兩個模型與實際行人位置的誤差,社會力模型的平均誤差為(x: 0.201m, y: -0.151m),神經網絡模型的平均誤差為(x: -0.177m, y: -0.160m)。這意味著社會力模型和神經網絡模型在垂直(y)方向上有類似的誤差,但社會力模型在水平(x)軸上的誤差相對較大。

圖5:社會力模型測試軌跡圖及實驗截圖

圖6:人工神經網絡模型測試軌跡圖及實驗截圖
4 結束語
本文設計了一個面向多場景的神經網絡人群運動模型,可以既滿足普適性的要求,又能在微觀表現、準確性和真實性方面超過現有的主流人群模型,如社會力模型。
本節提出的神經網絡人群模型是由數據驅動的,將多場景行人行為封裝成四層神經網絡,從而產生行人的速度和位置。仿真結果表明,本文設計的人工神經網絡模型不會像社會力模型那樣出現嚴重的不真實的位置波動,并且在速度密度曲線方面非常接近真實情況。本模型是由數據驅動的,因此在神經網絡模型結構確定的情況下,隨著訓練數據質量和數量的不斷提高,本模型可以更加接近真實情況。此外,社會力模型要求仿真步長必須小于0.008 秒,否則仿真中的行人會出現非正常移動,而本文所設計的神經網絡可以在0.06 秒步長下成功模擬行人行為,仿真性能優異。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
