基于激光雷達SLAM的核電站高放過濾器濾芯轉運機器人研究
2021-06-11 14:26:08張紅趙阿朋羅剛陳少南王國河
今日自動化 2021年1期
張紅 趙阿朋 羅剛 陳少南 王國河

[摘? ? 要]核電站高放過濾器通常每個燃料循環更換一次,濾芯劑量高,轉運路徑復雜,路程遠,人工轉運面臨高輻照風險,對高放過濾器濾芯的轉運研究開發一種基于激光雷達SALM技術的濾芯轉運機器人。
[關鍵詞]高放過濾器;濾芯轉運;激光雷達;SLAM
[中圖分類號]TP242 [文獻標志碼]A [文章編號]2095–6487(2021)01–00–03
Research on the Transfer Robot for High-Level Filter Element of Nuclear
Power Plant based on Laser radar SLAM
Zhang Hong,Zhao A-peng,Luo Gang,Chen Shao-nan,Wang Guo-he
[Abstract]Nuclear power plant high-level filter is usually replaced once per fuel cycle. The filter element dose is high, the transport path is complicated, and the distance is long. Manual transport faces high radiation risks. The transport of high-level filter elements is researched and developed based on lidar SALM technology. Filter transfer robot.
[Keywords]high-amplification filter; filter element transfer; lidar; SLAM
核電站系統設備結構復雜,設備本身或其運行環境具有放射性,為保證設備安全可靠,核電站需周期性進行停堆檢修,及時發現并更換老化、故障設備,并對廢棄核裝置進行去污和拆卸等,以保證核電站的安全運行。在維修活動中,往往涉及高放射性場所,操作者難以接近,而且伴隨著高溫、高噪音、狹窄空間、低光照等復雜惡劣環境,給維修活動帶來極大困難,僅靠人工進行,不僅維修效率低下,降低核電站運行的經濟性,而且會增大人員的受輻照劑量。而我國核電站現階段絕大部分維修及更換作業采用人工作業的方式,如化學與容積控制系統(以下簡稱RCV)高放過濾器更換均采用人工方式進行。
RCV高放過濾器位于環境劑量率較高的設備廠房,其過濾器濾芯通常每個燃料循環更換一次,部分核電站經過工藝改進后,更換頻率更高,達到每個月更換一次。更換時由于工作人員面臨高輻射風險,需穿戴鉛衣等防護用品,并做好人員分工,事先安排好傳遞人員接力傳遞位置,緊密協作,并對所經過的通道實施嚴格隔離與封閉。更換時打開法蘭蓋,手動抽出后迅速將高放射性的濾芯通過接力傳遞的方式通過狹長狹窄通道、不規則樓梯等復雜環境后放入專用的廢濾芯水泥存放桶。針對RCV高放過濾器濾芯更換的復雜性、高風險性、高輻照性,研發RCV高放過濾器更換機器人系統,代替人工方式進行作業,可以進入RCV高放過濾器房間,實現RCV過濾器濾芯的自動抽出、搬運和最終放置,減小人工操作的高風險及人員輻照劑量,實現核電站部分運維作業的機器人化以及智能化,推動智能核電運維工具的發展。
1 系統組成
RCV過濾器濾芯轉運機器人屬于RCV過濾器更換機器人系統一部分,用于RCV高放過濾器濾芯從過濾器廠房轉運至廢濾芯桶存放廠房,濾芯轉運距離遠,路徑復雜,而更換的濾芯放射性劑量高,轉運人員面臨高輻照風險,使用機器人替代人工轉運非常必要。
RCV過濾器濾芯轉運路徑狹窄,需經過多道防火門,部分防火門最大開啟寬度受限且有50mm左右門檻,需通過兩座梯形斜坡,機器人要求轉彎半徑小,有一定越障能力,通過梯形斜坡時穩定性較好。如圖1所示。
綜合考慮現場環境條件,RCV高放過濾器濾芯轉運機器人設計使用履帶底盤加升降濾芯桶的結構形式,機器人整體結構,如圖2所示。
機器人主要包括以下機構:履帶式底盤、濾芯桶升降系統、遠程控制系統、導航定位系統、視頻采集系統及通訊系統等。
1.1 履帶式行走機構
履帶式行走機構采用差速驅動,轉彎半徑小,適合電站內狹窄的工作環境;越障性能較好,能輕松越過路徑上的門檻。
1.2 濾芯桶升降系統
濾芯桶用于臨時存放高放廢濾芯,為了包容和盡可能的屏蔽濾芯的放射性,選用輻射屏蔽能力強的鉛桶作為濾芯桶;濾芯桶與底盤采用鉸鏈連接,緊急情況下可快速拆卸;濾芯桶設計有升降機構,可在30°~90°范圍內旋轉,機器人行走過程中濾芯桶放倒,降低機器人整體重心高度,增加通過梯形斜坡的穩定性;濾芯桶頂部設計蓋子,可以遠程控制打開關閉;底部設計有排污口,方便濾芯桶的排污及清洗去污。
1.3 視頻采集系統
視頻采集系統通過成像功能,將機器人周圍環境情況反饋至現場外的操作人員,同時操作人員可通過遠程攝像頭監控機器人的運行狀態。
1.4 SLAM導航定位系統
使用SLAM技術獲得較精確的建圖與定位結果,然后以SLAM輸出作為組合導航系統的輸入,進行多傳感器數據融合,最終輸出建圖與導航全信息:包括位置,速度,姿態等。
2 控制系統
2.1 系統硬件架構
RCV高放過濾器濾芯轉運機器人的控制系統由控制箱、視頻采集系統和導航定位系統組成。整體架構如圖3所示。
控制箱用于遠程操作RCV高放過濾器濾芯轉運機器人并顯示機器人狀態,控制箱是一個方便攜帶的手提箱。
視頻采集系統由車體頂部的云臺相機和車體四周的微型相機組成,由交換機連接,通過無線通信在工控機顯示屏上顯示,操作人員可通過在顯示屏上觀察機器人的作業狀態及周邊的作業環境,并通過上位機來控制相機的云臺、變焦及燈光等。
SLAM導航定位系統主要由三維激光掃描雷達、車體前后激光防撞雷達、左右超聲測距雷達、攝像頭、組合慣導、算法板、主控板、里程計和電機等組成。
2.2 激光雷達SLAM導航定位系統
目前主流的機器人定位技術是SLAM技術。SLAM技術的實現途徑主要包括視覺SLAM(VSLAM)、Wifi-SLAM與激光雷達SLAM。VSLAM指在室內環境下,用攝像機、Kinect等深度相機來做導航和探索,但是室內的VSLAM對環境要求高,對于光照不足、墻面反光的廠房環境不適用,而且計算量太大,對機器人系統的性能要求較高。Wifi-SLAM指利用智能手機中的多種傳感設備進行定位,包括Wifi、GPS、陀螺儀、加速計和磁力計,并通過機器學習和模式識別等算法將獲得的數據繪制出準確的室內地圖,該技術在擁有強屏蔽環境的核電站廠房顯然不適用。激光雷達SLAM指利用激光雷達作為傳感器,獲取地圖數據,使機器人實現同步定位與地圖構建。該技術經過多年驗證,已相當成熟,僅有的價格昂貴的缺點相對于核電環境人工作業的高輻照風險也在可接受的范圍內。并且激光雷達具有指向性強的特點,使得導航的精度得到有效保障,不僅可以在有環境光的情況下工作,也可以在黑暗中工作,而且在黑暗中測量效果更好,因此最終濾芯轉運機器人選用激光雷達SLAM導航定位方案。如圖4所示。
激光雷達SLAM導航定位系統按照功能主要分為3大部分:環境感知系統、規劃決策系統和底層控制系統。
環境感知系統利用機器人周圍安裝的傳感器進行環境地圖的構建及環境信息的探測和識別處理,主要包括傳感器模塊、SLAM建圖模塊和多傳感器數據實時融合處理模塊。
主要傳感器模塊有激光掃描雷達、攝像頭、防撞雷達和超聲測距傳感器、組合慣導、里程計。激光掃描雷達提供高精度的環境障礙物探測點云數據,其功能兼顧建圖和周身環境實時掃描檢測和識別,以建圖匹配定位功能為主,以目標探測感知為輔;激光防撞雷達和超聲測距雷達主要提供機器人周圍障礙物信息,與激光雷達和攝像頭融合處理,輔助定位;組合慣導提供機器人的位姿變化及輔助定位信息;里程計提供機器人運動距離信息系統。采用高精度多傳感器融合技術,集成激光雷達、高精度組合慣導和SLAM算法實現室內環境數據實時采集和測量,確保了系統的可靠性。
SLAM建圖模塊以機器人車體頂部的激光掃描雷達為主傳感器對機器人工作的區域環境進行掃描探測,利用激光SLAM技術進行大場景的實時地圖建模,從而為路徑規劃和定位匹配提供精確的激光高精地圖信息。
多傳感器融合處理模塊是機器人環境感知的重要單元,通過將激光雷達和攝像頭標定到統一坐標系,然后利用深度學習算法進行機器人車體前方目標的探測、識別融合處理,得到障礙物ID、中心坐標、大小、速度等信息,同時可進一步分割出環境邊界和路沿信息。
決策系統算法的核心任務是基于感知層系統算法的輸出結果,給出最終的行為/動作指令,包括行為決策(機器人的啟動和停止)和動作決策(機器人的轉向、速度等)等,具體功能包括實時避障、實時定位和路徑規劃導航。
機器人在全局路徑自動導航過程中遇到的前方動態障礙物目標以及路面路況信息,根據感知模塊的輸出結果,避障模塊做出局部路徑規劃實時避開障礙物,做出決策行為。
實時定位模塊采用如下融合的形式。
(1)采用航跡推算,依靠IMU(慣性測量單元)等,根據上一時刻的位置和方位推斷現在的位置和方位。
(2)環境特征掃描匹配,基于激光雷達的定位,用觀測到的特征和數據庫中的特征和存儲的特征進行匹配,得到現在車的位置和姿態。如圖5所示。
路徑規劃導航是機器人核心功能,也是決策系統的主要功能,利用感知層系統的信息,利用全局規劃給出運動的路線,同時根據避障信息的局部規劃功能做出具體的行為規劃和運動規劃,最后轉換為一系列連續的導航航跡目標運動。如圖6所示。
執行系統主要實現的是根據融合決策系統給出的路徑規劃信息完成航跡跟蹤運動和機器人控制。其中主要的航跡跟蹤算法框圖,如圖7所示。
根據機器人底盤的運動模型,將解算出的線速度和角速度進行平穩控制即可。
2.3 上位機
上位機人機交互系統操作界面由多個窗體界面組成,包括登錄界面、主界面、參數設置、報警顯示、帳戶管理等畫面,操作界面使操作員實時獲取機器人狀態信息,并下達操作指令。
如圖8所示,為開發的RCV過濾器濾芯轉運機器人主界面截圖,上位畫面動態顯示車體環境實時建圖信息、車體環境視頻信息、車體位置信息、濾芯桶升降系統狀態信息、運動狀態、車體運動控制等信息。
3 試驗測試
根據RCV過濾器現場環境及濾芯轉運路徑,在試驗廠房搭建模擬場景和轉運路徑,模擬場景,如圖9所示。
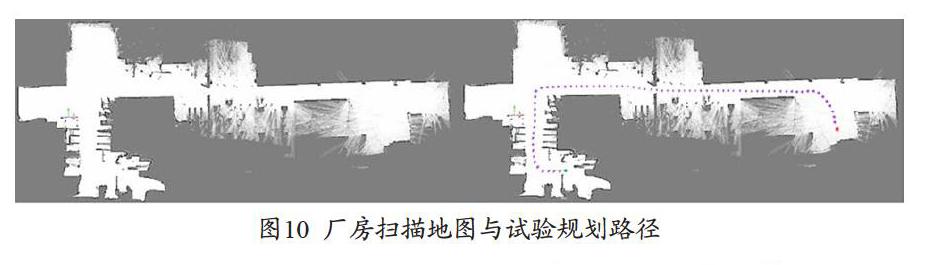
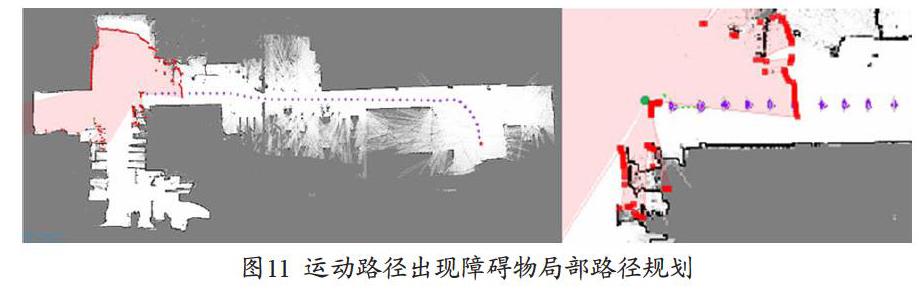
如圖10、11所示,圓圈為機器人本體,五角星為目標位置,小三角為路徑點,機器人按照規劃路徑前進。試驗中在路徑中臨時放置障礙物,紅色點為激光雷達掃描到的障礙物反射點,機器人能實時檢測并局部重新規劃路徑,繞過障礙物,并最終到達目標位置。
4 結語
經過測試及驗證,RCV過濾器濾芯轉運機器人能完成復雜環境下的濾芯轉運,根據目標位置,自主完成路徑規劃和實時建圖定位導航,自主避障,各系統模塊功能正常,整機工作性能穩定,機器人整體功能滿足使用要求,可為電站類似應用場景提供應用參考。
參考文獻
[1] 廖子威.激光雷達/微慣性室內自主建圖與導航技術研究[D].南京:南京航空航天大學,2016.
[2] 孫鳳池,黃亞樓,康葉偉.基于視覺的移動機器人同時定位與建圖研究進展[J].控制理論與應用,2010,27(4):488-494.
[3] 趙鈺.基于激光傳感器室內機器人自主導航技術研究[D].天津:天津理工大學,2017.
[4] 鄭向陽,熊蓉,顧大強.移動機器人導航和定位技術[J].機電工程,2003(20):35-37.