基于主頻預(yù)估的短波發(fā)射機(jī)功率自適應(yīng)控制方法
2021-06-07 11:15:44張永凱
通信電源技術(shù) 2021年4期
張永凱
(國(guó)家廣播電視總局二〇二二臺(tái),新疆 喀什 844000)
0 引 言
短波發(fā)射機(jī)是興起在20世紀(jì)80年代的一種脈沖調(diào)制發(fā)射機(jī),以其高效且靈活的特點(diǎn)被廣泛應(yīng)用到各個(gè)領(lǐng)域。在短波發(fā)射機(jī)播音時(shí)長(zhǎng)不斷增加的背景下,其播音頻率范圍也在隨之?dāng)U大。受全球氣溫變化影響,其工作環(huán)境也受到影響[1]。冬季和夏季的極端天氣會(huì)減少短波發(fā)射機(jī)的使用壽命,發(fā)射機(jī)內(nèi)的蒸發(fā)冷卻設(shè)備和水循環(huán)設(shè)備都會(huì)造成短波發(fā)射機(jī)的運(yùn)行困難。主頻預(yù)估指的是評(píng)估和預(yù)測(cè)CPU內(nèi)核工作的時(shí)鐘頻率,主要用于衡量機(jī)器的運(yùn)行速度等影響因素[2]。自適應(yīng)控制方法最初是為了解決飛機(jī)自動(dòng)駕駛儀的參數(shù)不穩(wěn)定問(wèn)題,在后續(xù)發(fā)展過(guò)程中逐漸應(yīng)用到其他領(lǐng)域。國(guó)外開(kāi)展短波發(fā)射機(jī)功率自適應(yīng)控制方法的研究較早,研究重點(diǎn)主要集中在輸入載波功率及音頻調(diào)制功率層面,將數(shù)字化的直流信號(hào)作為衡量功率大小的主要標(biāo)準(zhǔn)。國(guó)內(nèi)的相關(guān)研究成果主要集中在短波發(fā)射機(jī)的功率故障處理方面,針對(duì)的是在運(yùn)行過(guò)程中出現(xiàn)的一系列損耗問(wèn)題[3]。目前,學(xué)術(shù)界關(guān)于將主頻預(yù)估和短波發(fā)射機(jī)功率自適應(yīng)控制方法相結(jié)合的資料并不是十分全面,需要進(jìn)一步深入探討。
1 基于主頻預(yù)估的短波發(fā)射機(jī)功率自適應(yīng)控制方法
1.1 調(diào)整短波發(fā)射機(jī)功率不平衡結(jié)構(gòu)
短波發(fā)射機(jī)在正常狀態(tài)下的阻抗變換作用并不是十分明顯,導(dǎo)致發(fā)射機(jī)功率的分布指標(biāo)較小,需要切換短波發(fā)射機(jī)的不平衡結(jié)構(gòu)。根據(jù)短波發(fā)射機(jī)的運(yùn)行需要,在平衡饋線(xiàn)之間進(jìn)行阻抗匹配[4]。由于短波發(fā)射機(jī)內(nèi)的轉(zhuǎn)換器量感較小,無(wú)法截獲所有的屏蔽體,必須要得出屏蔽體的實(shí)際長(zhǎng)度與波長(zhǎng)才能避免短波發(fā)射機(jī)的負(fù)載抗電性[5]。借助終端的真空電容器,實(shí)時(shí)補(bǔ)償發(fā)射機(jī)功率的電抗。一般情況下,短波發(fā)射機(jī)的裝備會(huì)有3~10個(gè)不等的標(biāo)準(zhǔn)頻帶,每個(gè)頻帶中包含80個(gè)預(yù)設(shè)值,并在4.8~23.4 MHz的頻率范圍內(nèi)合理分布。包括電動(dòng)機(jī)定位和開(kāi)關(guān)元器件定位等信息在內(nèi)的影響因素,都需要將固化值與預(yù)設(shè)值進(jìn)行匹配[6]。調(diào)諧數(shù)據(jù)是判定機(jī)械元件操作性能的重要依據(jù),需要實(shí)時(shí)監(jiān)控其調(diào)諧狀態(tài),自動(dòng)修正錯(cuò)誤數(shù)據(jù)[7]。基于上述描述,實(shí)現(xiàn)調(diào)整短波發(fā)射機(jī)功率不平衡結(jié)構(gòu)的目的。
1.2 基于主頻預(yù)估建立機(jī)體坐標(biāo)系
根據(jù)短波發(fā)射機(jī)的非線(xiàn)性特征,基于主頻評(píng)估建立機(jī)體坐標(biāo)系。在位置信息中,短波發(fā)射機(jī)的相對(duì)位置是坐標(biāo)系建立的基礎(chǔ)信息,結(jié)合短波發(fā)射機(jī)的姿態(tài)角、速度以及方向等數(shù)據(jù),建立相應(yīng)的機(jī)體坐標(biāo)系[8]。短波發(fā)射機(jī)的功率大小同樣會(huì)影響其主頻評(píng)估結(jié)果,在既定的功率區(qū)間內(nèi)選擇出合適的定位數(shù)據(jù)。在慣性空間中,先確定兩個(gè)坐標(biāo)軸的水平和垂直方向,并將短波發(fā)射機(jī)的重心作為原點(diǎn),確定其姿態(tài)角的取值范圍[9]。短波發(fā)射機(jī)姿態(tài)角的結(jié)構(gòu)如圖1所示。
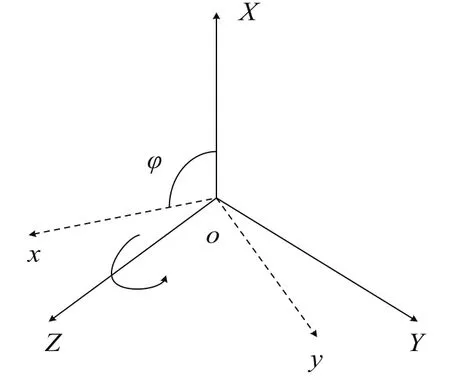
圖1 短波發(fā)射機(jī)姿態(tài)角結(jié)構(gòu)
由圖1可知,短波發(fā)射機(jī)的姿態(tài)角結(jié)構(gòu)與平面上的投影有關(guān),機(jī)體的運(yùn)動(dòng)方向會(huì)直接改變其姿態(tài)角結(jié)構(gòu)。設(shè)定短波發(fā)射機(jī)地球坐標(biāo)系與機(jī)體坐標(biāo)系的原點(diǎn)位置是重合狀態(tài),利用主頻預(yù)估結(jié)果,設(shè)定電路中的電容電感指標(biāo),保證各個(gè)元器件之間有并聯(lián)諧振關(guān)系[10]。在輸出足夠信號(hào)的同時(shí),實(shí)現(xiàn)機(jī)體坐標(biāo)系建立的目的,基于此完成機(jī)體坐標(biāo)系建立步驟。
1.3 構(gòu)建動(dòng)力學(xué)模型
在多目標(biāo)優(yōu)化的基礎(chǔ)上不斷調(diào)整輸出功率與降壓數(shù)值之間的關(guān)系,求得最優(yōu)解集,構(gòu)建動(dòng)力學(xué)模型。在構(gòu)建動(dòng)力學(xué)模型的過(guò)程中需要考慮機(jī)器開(kāi)、關(guān)兩種不同狀態(tài)下可用電容與電感的參數(shù)變化,并確定驅(qū)動(dòng)電路的輸出狀態(tài)。為了滿(mǎn)足動(dòng)力學(xué)模型的需求,合理調(diào)整安裝的諧波濾波器。考慮到電諧波的參數(shù)問(wèn)題,必須將諧波的殘波數(shù)值控制在30~50 mW,否則會(huì)影響建模效果。選擇短波發(fā)射機(jī)的相應(yīng)信道,并不斷調(diào)整反射功率的數(shù)值,使反射功率保持在最小區(qū)間內(nèi)。
1.4 利用遺傳算法設(shè)置自適應(yīng)控制模式
利用遺傳算法設(shè)置自適應(yīng)控制模式是設(shè)計(jì)控制方法的重要環(huán)節(jié)。結(jié)合遺傳算法候選解適應(yīng)度較高的特點(diǎn),不斷優(yōu)化搜索目標(biāo)。在計(jì)算最大值和最小值的過(guò)程中,將驅(qū)動(dòng)馬達(dá)向正方向和負(fù)方向同時(shí)移動(dòng)5個(gè)區(qū)間,確保在運(yùn)行過(guò)程中能夠快速找到諧振點(diǎn),實(shí)現(xiàn)參數(shù)調(diào)節(jié)的目的。提取出短波發(fā)射機(jī)功率的歷史數(shù)據(jù),根據(jù)數(shù)據(jù)分布特征重新排列并調(diào)整布局結(jié)構(gòu)。為了使短波發(fā)射機(jī)能夠輸出較大信號(hào),需要在數(shù)據(jù)處理的基礎(chǔ)上讀取A/D卡的表值信息,對(duì)各個(gè)組件都實(shí)行精準(zhǔn)控制。基于上述描述,完成利用遺傳算法自適應(yīng)控制模式步驟。
2 仿真實(shí)驗(yàn)
2.1 搭建實(shí)驗(yàn)環(huán)境
實(shí)驗(yàn)配置及參數(shù)如表1所示。
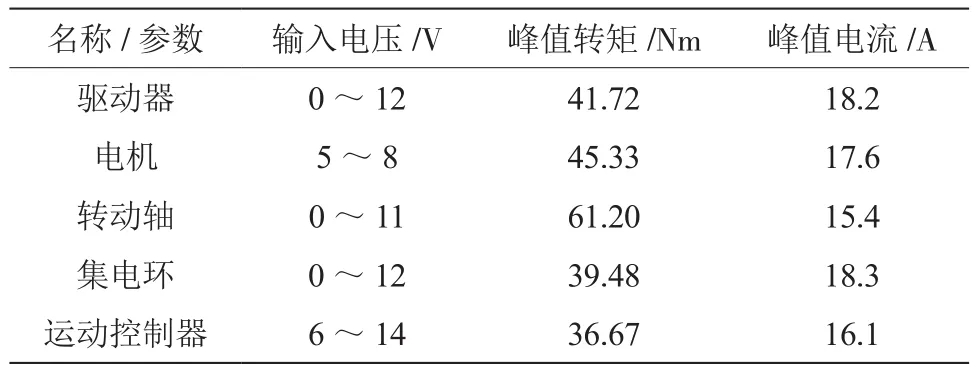
表1 實(shí)驗(yàn)配置及參數(shù)
基于上述實(shí)驗(yàn)配置及參數(shù),進(jìn)行實(shí)驗(yàn)測(cè)試,并得出實(shí)驗(yàn)結(jié)果。
2.2 實(shí)驗(yàn)結(jié)果
實(shí)驗(yàn)選取3種現(xiàn)有控制方法,與此次設(shè)計(jì)的控制方法進(jìn)行實(shí)驗(yàn)對(duì)比。在靜態(tài)誤差為80 m的條件下,測(cè)試4種方法的收斂速度,速度越快,證明控制方法的實(shí)際應(yīng)用性能越好。實(shí)驗(yàn)結(jié)果如表2所示。
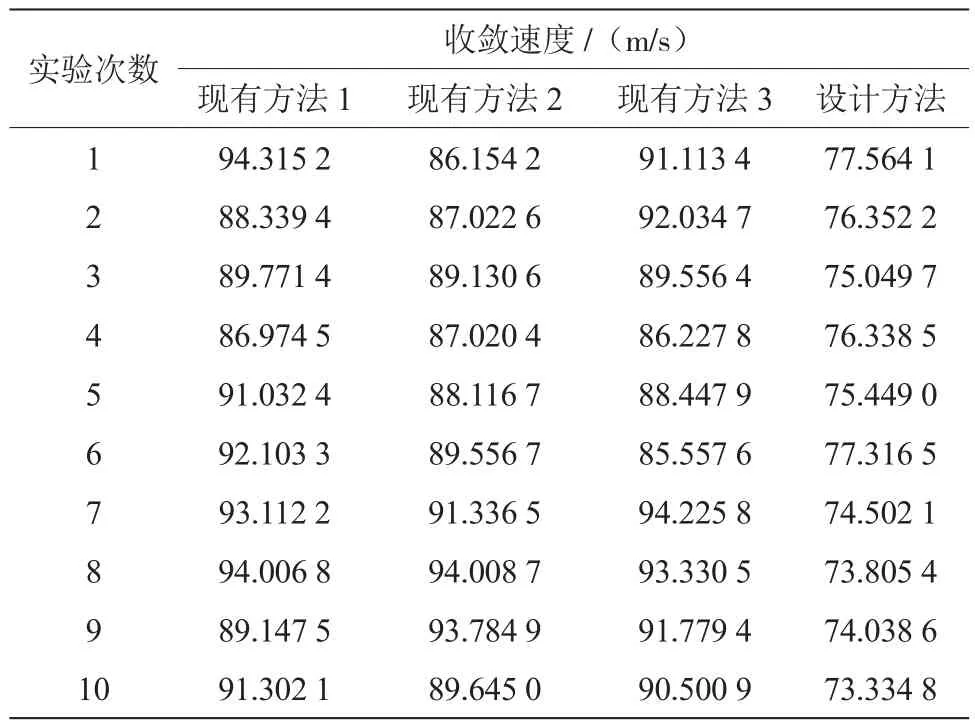
表2 實(shí)驗(yàn)結(jié)果
由表2可知,現(xiàn)有方法1的收斂速度最高為94.315 2 m/s,現(xiàn)有方法2的收斂速度最高為94.008 7 m/s,現(xiàn)有方法3的收斂速度最高為94.225 8 m/s,設(shè)計(jì)方法的收斂速度最高為77.564 1 m/s,證明此次設(shè)計(jì)的自適應(yīng)控制方法性能更佳。
3 結(jié) 論
此次設(shè)計(jì)的自適應(yīng)控制方法經(jīng)過(guò)實(shí)驗(yàn)測(cè)試證明具有良好的實(shí)用性能,在一定程度上推動(dòng)了整個(gè)短波發(fā)射機(jī)領(lǐng)域的研究進(jìn)展,同時(shí)為學(xué)術(shù)界開(kāi)展相關(guān)自適應(yīng)控制方法的研究奠定了理論基礎(chǔ)與實(shí)踐基礎(chǔ)。
猜你喜歡
小獼猴智力畫(huà)刊(2022年9期)2022-11-04 02:31:42
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
電子制作(2018年9期)2018-08-04 03:31:04
電子制作(2018年12期)2018-08-01 00:48:02
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
Coco薇(2016年2期)2016-03-22 02:42:52
西部廣播電視(2015年9期)2016-01-18 03:46:07
西部廣播電視(2015年3期)2016-01-15 02:05:45
Coco薇(2015年1期)2015-08-13 02:47:34