EBH96懸臂式掘進機遠程控制系統的研究
2021-06-05 09:18:00閆建軍
機械管理開發 2021年4期
閆建軍
(霍州煤電集團大地煤業有限公司,山西 臨汾 041000)
引言
掘進機的應用大幅提升了橋梁、隧道、煤炭開采等行業的施工效率,因此得到了越來越多的應用。礦用掘進機主要被用于煤層的掘進、開采,也可對截割下來的煤礦進行裝載和運輸,同時具有自行運動的能力,通常由司機在現場操作完成。但是由于巷道內作業環境惡劣,且人體勞動強度大,所以需要對掘進機動作進行遠程控制。隨著現代控制技術的發展,現代掘進機向著智能化、無人化方向快速發展,可有效提高掘進機工作效率。
對掘進機的動作與行為進行分析,可以確定遠程控制系統的控制對象,主要包括掘進機行走部、回轉支撐液壓系統、舉升液壓系統以及刀盤的轉速等。遠程控制系統實現了遠程對掘進機的監控與操作,提高了掘進機的作業效率以及對操作人員的安全保障,所以遠程控制系統的應用具有重要意義[1]。
1 EBH96掘進機概述
掘進機型號與種類繁多,但基本的結構類似,以EBH96型掘進機為例,對該型掘進機的結構組成、性能參數做簡要介紹。掘進機基本結構包括掘進機構、運輸機構、走行機構、電氣系統、液壓系統等,結構相對復雜。掘進機是一款綜合性大型設備,其包含了巖層的截割、行走、運載等功能,該型掘進機還具有尺寸小、操作靈活、工作效率高等特點。
EBH96型掘進機最大掘進高度4.2 m,最大掘進寬度為6.0 m,爬坡能力±16°,其生產能力可達60 m3/min。掘進機通過性較好,最小離地間隙為210 mm,設備總裝機功率為130 kW,設備總外形尺寸(長×寬×高)為8 120 mm×1 750 mm×1 600 mm,如圖1所示的掘進機實物圖[2]。

圖1 EBH96型掘進機實物圖
2 控制系統總體方案設計
通過對掘進機遠程控制功能需求的分析,并參考其他相關的控制設計,確定本控制系統的總體方案。遠程控制系統主要包括數據監控采集、控制系統、掘進機狀態監控、信息顯示和控制執行等,以下對控制系統的總體結構設計做簡要介紹,如圖2所示,為控制系統總的結構設計關系圖,下面對其中主要的子系統做簡要說明。
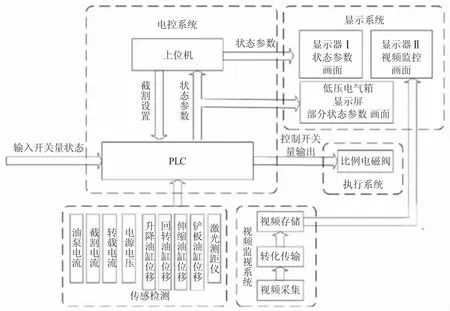
圖2 掘進機遠程線控系統功能圖
2.1 數據采集
主要是在掘進機機身上布置各型傳感器,負責采集車身的電機轉速、液壓系統壓力和液壓閥的狀態、車身姿態、截割部定位信息等。數據的采集是為了盡可能反應出機器運行的實際狀態,是電氣控制的基礎、控制的依據[3]。
2.2 控制系統
其主要邏輯是由傳感器采集的數據由邏輯控制器(PLC)進行處理,輸出對控制器的指令,從而達到對掘進機狀態的控制,同時控制系統可將信息進行顯示或由人工進行控制。
2.3 控制執行
控制執行系統主要負責接收來自控制器或者人工遠程操作的控制命令,將命令信號轉化為液壓系統電磁閥動作控制信號,由此實現對掘進機動作的控制。
2.4 監控系統
掘進機狀態監控對于判斷掘進機的作業環境、姿態具有重要幫助,將采集到的視頻信息通過無線網絡傳回地面控制中心,保證了操作人員對掘進機狀態的實時監控[4]。
3 控制系統軟件結構設計
控制系統的軟件部分主要包括電氣控制、功能相關的控制以及操作臺信息顯示系統,如圖3所示,為控制系統軟件組成結構示意圖。使用相對獨立的三套子系統,各自之間分工明確,同時相互協調完成對掘進機電氣系統的控制。
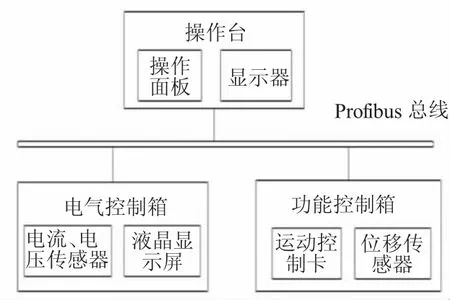
圖3 電氣控制系統設計
3.1 電氣控制
電氣控制系統主要包括掘進機電機的電流、電壓傳感器以及液晶顯示系統的控制,本系統中對于相關參數的控制使用了PLC程序控制,程序編程在此不再一一列舉。
3.2 功能系統
主要是掘進機傳感器參數的采集與識別,控制器根據傳感器所采集的信息,分析后由PLC模塊輸出給運動放大卡,控制比例電磁閥,從而控制掘進機相關油缸動作。
3.3 操作臺
地面操作中心主要包括顯示器以及操作控制系統,顯示器主要用于顯示掘進機作業時的視頻監控信息,控制器則提供了掘進機動作的控制按鈕。在控制中心的人員可以進行遠程控制,實現人機交互式操作[5]。
4 控制系統硬件結構設計
控制系統的通信設備是實現其具體功能的基礎,通信總線采用的是PROFIBUS現場控制總線方式,其傳輸速率可達30 MB/s,可靠性好,使用維護方便。根據該系統的結構設計,在此對系統中相關的某些傳感器的選型做簡要分析說明。
4.1 測距儀
選擇了工業級專用的激光測距儀,用以檢測掘進機和巷道間的距離,以此保障掘進機運行的安全。根據項目的實際應用情況,選擇了5個SPL-C4型激光測距儀,該測距儀測量范圍為0.1~12 m,測量誤差小于0.1 m,工作電壓12 V,傳感器響應時間小于4 s,共包含3個輸出端口[6]。
4.2 直線位移傳感器
掘進機大部分工作部件的動作均是由液壓缸驅動,而液壓缸的動作可由直線位移傳感器進行采集,從而準確地獲取把控掘進機的動作。在此選擇了LCS-16的直線位移傳感器,該傳感器測量行程為0~800 mm,測量誤差范圍為0.1%,工作電壓12 V,如圖4所示為該傳感器實物圖。
5 掘進機電控系統實現
根據掘進機的實際應用情況,構建了一套遠程控制系統,該系統實現了對掘進機動作的操作與控制和狀態監控。如圖4所示,為地面控制中心控制系統的登錄界面,軟件的具體編程過程由專業團隊合作完成,在此不再贅述。

圖4 控制系統登錄界面
本掘進機遠程控制系統被應用于實際巷道掘進之中,并對控制系統的性能進行了測試驗證,測試結果顯示控制系統對掘進機狀態的視頻監控、掘進機動作的控制效果良好,極大地提高了掘進機的工作效率,同時提高了操作人員工作環境的安全性。
6 結論
本套掘進機遠程控制系統已經被應用于實踐,后期對該控制系統進行了跟蹤測試,測試結果顯示控制系統具有較高的可靠性、安全性,可實現遠程對掘進機的控制,對于提升掘進機工作效率具有重要意義。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
家庭影院技術(2017年9期)2017-09-26 03:41:45
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49