基于Freeman鏈碼的巖心交叉裂縫分離算法
2021-06-05 06:28:32滕奇志
智能計(jì)算機(jī)與應(yīng)用 2021年4期
關(guān)鍵詞:方向
楊 勝,滕奇志
(四川大學(xué) 電子信息學(xué)院圖像信息研究所,成都610065)
0 引 言
隨著地質(zhì)石油勘探開(kāi)發(fā)的逐漸深入,石油與天然氣勘探方向開(kāi)始逐漸由淺轉(zhuǎn)向深部、由常規(guī)油氣藏轉(zhuǎn)向特殊油氣藏。特別是裂縫性油氣藏,成為地質(zhì)石油勘探方向的主要研究目標(biāo)[1]。在裂縫性油氣藏中,研究裂縫的發(fā)育程度和分布范圍,對(duì)石油和天然氣開(kāi)采具有重要的意義。通過(guò)圖像處理技術(shù),對(duì)巖心CT圖像進(jìn)行處理和分析,是研究巖心裂縫的一種較好的方法。為了計(jì)算每條裂縫的相關(guān)參數(shù),首先需要將裂縫進(jìn)行提取,再進(jìn)行統(tǒng)計(jì)分析相關(guān)參數(shù)。但有些裂縫存在交叉的情況,需要通過(guò)算法自動(dòng)地將交叉裂縫分離。圖1展示了裂縫CT圖像經(jīng)過(guò)閾值分割后,存在交叉裂縫的情況。
從圖1(c)看來(lái),單個(gè)交叉裂縫二值圖像在局部上具有直線特征,可以通過(guò)提取交叉裂縫的直線部分來(lái)將交叉裂縫進(jìn)行分離。所以針對(duì)交叉裂縫分離的問(wèn)題可以轉(zhuǎn)換成圖像直線提取的問(wèn)題。20世紀(jì)60年代,F(xiàn)reeman提出了直線檢測(cè)準(zhǔn)則[2]。通過(guò)這個(gè)準(zhǔn)則,可以檢測(cè)出圖像中的直線部分。除此之外,有些學(xué)者在此基礎(chǔ)上進(jìn)一步引入了直線檢測(cè)方向優(yōu)先級(jí)的概念[3-4]。方向優(yōu)先級(jí)的引進(jìn),提高了直線檢測(cè)過(guò)程中平滑程度,可以更有利于處理直線交叉的情況。本文基于Freeman鏈碼優(yōu)先級(jí)直線提取算法的思想,對(duì)巖心二維CT序列圖像的交叉裂縫進(jìn)行分離,并在算法基礎(chǔ)上引進(jìn)了概率優(yōu)先準(zhǔn)則,使算法更好地適用于交叉裂縫的情況。
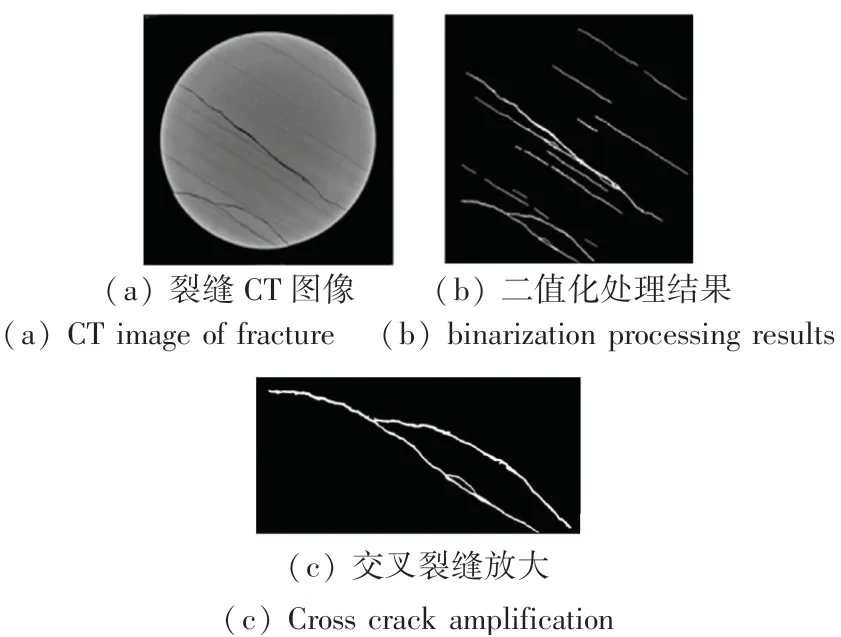
圖1 二值化處理裂縫CT圖像Fig.1 Crack CT image for binarization
1 Freeman鏈碼交叉裂縫分割算法描述
Freeman鏈碼直線提取算法,主要是檢測(cè)圖像的直線部分。首先需要對(duì)裂縫二值圖進(jìn)行細(xì)化處理,得到裂縫骨架[5-6]。理想情況下,經(jīng)過(guò)圖像細(xì)化后得到的骨架是單像素寬度的,單像素寬的裂縫骨架更有利于裂縫骨架的特征提取[7-8]。但在實(shí)際情況中,在骨架的轉(zhuǎn)折處或者交點(diǎn)處,并不能完全實(shí)現(xiàn)單像素。所以,要先對(duì)骨架圖像進(jìn)行單像素處理[9],然后再對(duì)裂縫骨架進(jìn)行Freeman鏈碼直線提取。由于巖心裂縫只在局部上具有直線特征,因此在對(duì)裂縫骨架進(jìn)行Freeman鏈碼直線提取后,會(huì)造成裂縫骨架的斷開(kāi)。
本文在提取裂縫骨架直線的基礎(chǔ)上,考慮了裂縫骨架端點(diǎn)附近的梯度信息。根據(jù)骨架端點(diǎn)附近的梯度信息,可以使得斷裂的骨架直線合并。合并后便可以得到一條完整的裂縫骨架直線,由此便可以將交叉裂縫中單個(gè)裂縫的骨架分別提取出來(lái)。得到裂縫的骨架數(shù)據(jù)后,可以通過(guò)骨架平移操作,將完整的裂縫目標(biāo)提取出來(lái)。具體算法流程如圖2所示。

圖2 算法流程Fig.2 Algorithm flow
1.1 Freeman鏈碼直線提取
Freeman鏈碼是用線段的起點(diǎn)加上由八個(gè)方向符所構(gòu)成的一組數(shù)列,數(shù)列中的值代表著八鄰域中兩像素的相對(duì)位置。對(duì)于每個(gè)像素點(diǎn)來(lái)說(shuō),其相鄰的點(diǎn)都可以用八方向符中某一個(gè)值表示。八方向鏈碼如圖3所示。由此可知,裂縫骨架圖像中,任何一組骨架曲線都可以由一組鏈碼串表示。Freeman直線提取算法,從裂縫骨架的一個(gè)點(diǎn)跟蹤到另一個(gè)點(diǎn),一定會(huì)對(duì)應(yīng)一組鏈碼序列。
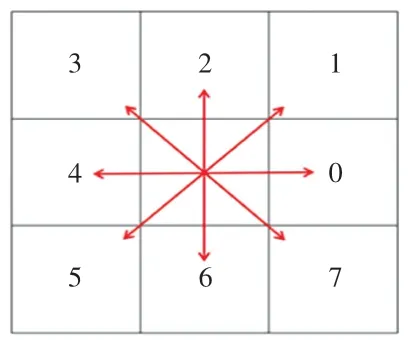
圖3 八鄰域鏈碼Fig.3 Chain code of eight neighborhood
Freeman根據(jù)直線在離散平面的特性,提出了直線在離散平面時(shí)鏈碼應(yīng)該遵循的三條準(zhǔn)則[2](簡(jiǎn)稱(chēng)Freeman準(zhǔn)則):
(1)鏈碼中至多只有2個(gè)方向碼,其中一個(gè)為主方向,且其值相差1。
(2)若有兩個(gè)方向碼,則次級(jí)方向碼必單個(gè)出現(xiàn),不能連續(xù)出現(xiàn)。
(3)次級(jí)方向碼總是盡可能均勻地出現(xiàn)在鏈碼中。
由于裂縫骨架在局部上才完全符合直線特征,故完全依照Freeman準(zhǔn)則來(lái)提取裂縫是不可行的。本文算法根據(jù)裂縫骨架特征,對(duì)Freeman準(zhǔn)則做出的部分改進(jìn)如下:
裂縫在全局上的趨勢(shì)走向并不像純粹的直線那樣單調(diào),2個(gè)方向碼并不能很好地表征一個(gè)裂縫在全局上的趨勢(shì)走向,故本文算法在Freeman準(zhǔn)則基礎(chǔ)上的至多兩個(gè)方向碼,額外增加了一個(gè)方向碼。其中一個(gè)為主方向且另兩個(gè)方向碼和主方向的值相差1。另外,在此基礎(chǔ)上增加了每個(gè)方向碼出現(xiàn)的概率信息,在對(duì)裂縫骨架每個(gè)點(diǎn)進(jìn)行迭代時(shí),更新目前鏈碼中所有方向碼的概率。
統(tǒng)計(jì)鏈碼中每個(gè)方向碼的概率的好處是:
(1)由于裂縫趨勢(shì)走向的不確定性,鏈碼的主方向在每次迭代過(guò)程都可能會(huì)改變,利用概率信息可以快速得到當(dāng)前迭代時(shí)的主方向。
(2)當(dāng)鏈碼有3個(gè)方向碼時(shí),在某一輪的迭代跟蹤過(guò)程中,發(fā)現(xiàn)3個(gè)方向碼都存在目標(biāo)點(diǎn),這時(shí)選擇繼續(xù)跟蹤概率最大的那個(gè)方向碼,保證跟蹤過(guò)程盡可能平滑。
如對(duì)某個(gè)直線L進(jìn)行跟蹤。當(dāng)搜索到直線L的第一個(gè)像素點(diǎn)時(shí),按照以下方式進(jìn)行迭代:
(1)當(dāng)前鏈碼為空時(shí),則按照0~7的方向,逆時(shí)針?biāo)阉鞯谝粋€(gè)鏈碼值,如圖4(a)所示。
(2)當(dāng)前鏈碼中只有一個(gè)方向D1時(shí),先判斷D1方向是否可以繼續(xù)跟蹤。若不能,則尋找另一個(gè)鏈碼方向D2,如圖4(b)所示。
(3)當(dāng)前的鏈碼中有兩個(gè)方向D1和D2時(shí),首先跟蹤概率較大的方向,若失敗則繼續(xù)跟蹤另一個(gè)方向,若兩個(gè)方向全部跟蹤失敗,尋找新的方向D3,如圖4(c)所示。
(4)當(dāng)前的鏈碼中有3個(gè)方向D1、D2和D3時(shí),按照從大到小的概率依次跟蹤,如圖4(d)所示。
圖中虛線的含義是,當(dāng)實(shí)線的方向全部不能繼續(xù)跟蹤時(shí)可以選擇的新方向。
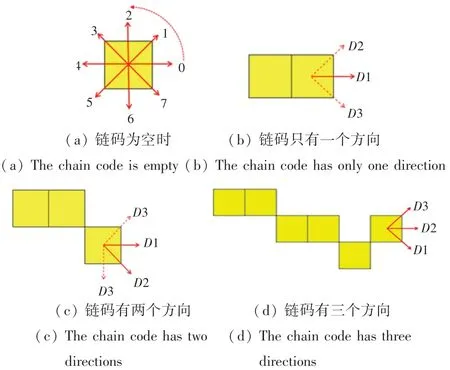
圖4 跟蹤示意圖Fig.4 Tracing diagram
若圖像中分布有很多噪聲,F(xiàn)reeman直線檢測(cè)算法在跟蹤的過(guò)程中,也可以直接去除圖像中的毛刺和噪聲[10]。通過(guò)設(shè)置一個(gè)鏈碼閾值長(zhǎng)度,一輪迭代完成后,判斷當(dāng)前鏈碼串的長(zhǎng)度是否大于該閾值長(zhǎng)度,大于閾值長(zhǎng)度則說(shuō)明該鏈碼串是合格的鏈碼串,而小于閾值長(zhǎng)度,則說(shuō)明這個(gè)鏈碼串是噪聲應(yīng)當(dāng)舍棄,繼續(xù)掃描下一個(gè)骨架點(diǎn),開(kāi)始下一個(gè)鏈碼串的跟蹤過(guò)程。每次迭代完成后,都記錄已跟蹤過(guò)的點(diǎn),若重新跟蹤到標(biāo)記跟蹤過(guò)的點(diǎn)則直接跳過(guò),直至所有的骨架點(diǎn)都掃描完畢,結(jié)束本次跟蹤過(guò)程。實(shí)驗(yàn)結(jié)果如圖5所示。
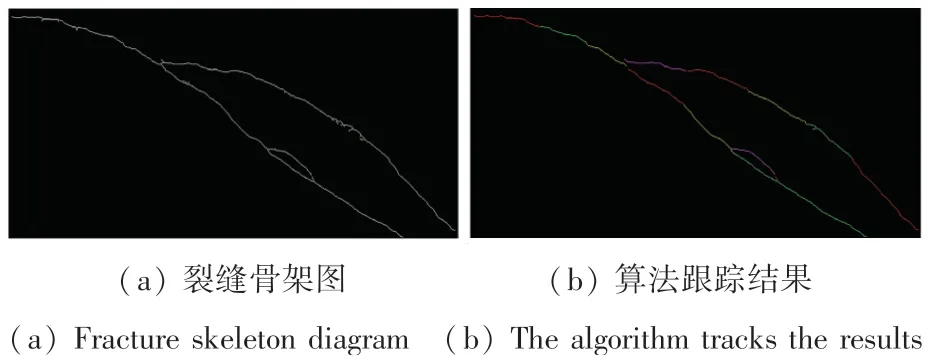
圖5 Freeman鏈碼直線提取Fig.5 Line extraction for Freeman chain code
1.2 裂縫骨架合并
由上述可知,在對(duì)裂縫骨架進(jìn)行鏈碼跟蹤之后,會(huì)出現(xiàn)裂縫骨架斷裂的情況,這時(shí)需進(jìn)行骨架合并計(jì)算。裂縫骨架是否可以合并和裂縫骨架端點(diǎn)之間的距離及骨架的偏轉(zhuǎn)角有關(guān)。設(shè)第L k條骨架的首尾端點(diǎn)為L(zhǎng) k(x1,y1),L k(xm,y m),根據(jù)公式(1):

可獲得裂縫骨架的偏轉(zhuǎn)角θL k。判斷骨架L k和L k+i是否可以合并的充要條件是:偏轉(zhuǎn)角滿(mǎn)足公式(2),骨架端點(diǎn)間的距離滿(mǎn)足公式(3):
其中,di s t函數(shù)代表兩坐標(biāo)點(diǎn)間的距離,α、β分別代表骨架偏轉(zhuǎn)角閾值和骨架端點(diǎn)距離閾值。當(dāng)裂縫骨架經(jīng)過(guò)跟蹤算法處理后的兩條裂縫骨架滿(mǎn)足裂縫合并的充要條件時(shí),便可將二者進(jìn)行合并,具體算法如下:
(1)搜索到還未處理過(guò)的裂縫骨架L k,轉(zhuǎn)步驟(2);若檢測(cè)到全部裂縫骨架已經(jīng)處理,則轉(zhuǎn)到步驟(3)。
(2)判斷裂縫骨架L k和L k+i是否滿(mǎn)足合并的充要條件。若滿(mǎn)足,則將兩條裂縫骨架合并為一條裂縫骨架L k,并將L k+i設(shè)置為另一條未處理過(guò)的裂縫骨架,重復(fù)步驟(2),否則轉(zhuǎn)到步驟(1)。
(3)結(jié)束裂縫骨架合并算法。
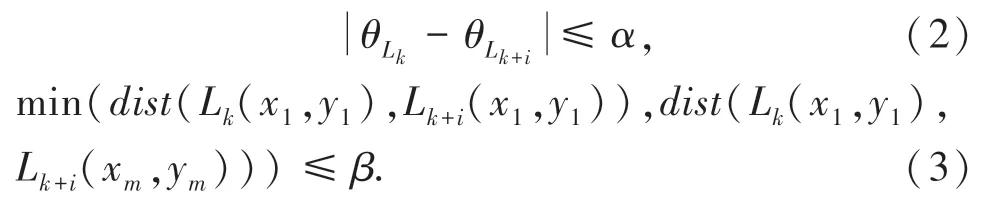
在上節(jié)裂縫骨架完成Freeman鏈碼直線提取的基礎(chǔ)上,進(jìn)行骨架合并。實(shí)驗(yàn)結(jié)果如圖6所示。
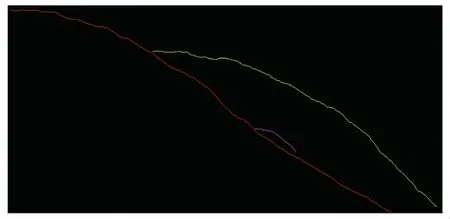
圖6 骨架合并Fig.6 Skeleton merging
1.3 裂縫完整目標(biāo)提取
由圖6結(jié)果可知,最終得到是一條線性單像素寬度的裂縫骨架,并不能完全覆蓋真實(shí)的裂縫區(qū)域。所以,需要通過(guò)一定的算法提取整個(gè)裂縫目標(biāo)。通過(guò)對(duì)裂縫骨架平移后,與裂縫二值圖像求交集操作,可以將完整的裂縫目標(biāo)提取出來(lái)。裂縫骨架平移方向上的選擇和裂縫骨架鏈碼的主方向呈90°關(guān)系,并且由于細(xì)化的裂縫骨架處于裂縫二值圖的中軸,所以骨架的平移方向是兩個(gè)互補(bǔ)的方向。算法實(shí)現(xiàn)過(guò)程如下:
(1)將方向平移間隔變量n1和n2初始化為1。
(2)掃描一條裂縫骨架L k,將L k的坐標(biāo)數(shù)據(jù)拷貝到P。根據(jù)裂縫骨架鏈碼的主方向求出平移方向,轉(zhuǎn)到步驟(3),若完成所有裂縫骨架平移后,轉(zhuǎn)到步驟(5)。
(3)將P所有坐標(biāo)拷貝后,向平移方向平移n1個(gè)間隔,并且與裂縫細(xì)化之前的二值圖相比較。若重合度達(dá)80%,則將平移后的坐標(biāo)數(shù)據(jù)更新到裂縫骨架L k中,n1自加1,重復(fù)步驟(3),否則轉(zhuǎn)到步驟(4)。
(4)將P中所有坐標(biāo)拷貝后,向另一方向平移n2個(gè)間隔,并與裂縫二值圖相比較。若重合度達(dá)80%,將平移后的坐標(biāo)數(shù)據(jù)更新到裂縫骨架L k,n2自加1,重復(fù)步驟(4),否則轉(zhuǎn)到步驟(1)。
(5)結(jié)束裂縫骨架平移算法。
通過(guò)上節(jié)的裂縫骨架提取裂縫,完整目標(biāo)結(jié)果如圖7所示。
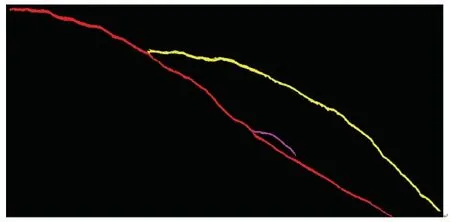
圖7 裂縫完整目標(biāo)提取Fig.7 Extraction of crack complete target
2 實(shí)驗(yàn)結(jié)果
為了驗(yàn)證本文算法的正確性,取4組真實(shí)的巖心CT圖像作為實(shí)驗(yàn)數(shù)據(jù),實(shí)驗(yàn)結(jié)果如圖8所示。其中圖8(a)表示在真實(shí)環(huán)境下存在交叉裂縫的巖心CT圖像;圖8(b)是將圖8(a)經(jīng)過(guò)閾值分割、去噪等形態(tài)學(xué)操作提取裂縫的結(jié)果;圖8(c)是由本文算法對(duì)圖8(b)處理的結(jié)果。
圖8 實(shí)驗(yàn)結(jié)果Fig.8 Experimental result
由上述實(shí)驗(yàn)結(jié)果可知,本文算法能夠在不影響裂縫本身特征的情況下將交叉裂縫進(jìn)行分離,并且分離結(jié)果符合現(xiàn)實(shí)預(yù)期結(jié)果,為后續(xù)裂縫統(tǒng)計(jì)參數(shù)分析提供更可靠的數(shù)據(jù)支撐。
3 結(jié)束語(yǔ)
傳統(tǒng)裂縫提取算法在遇到交叉裂縫的情況下,無(wú)法進(jìn)行有效的處理。為此本文提出了一種基于Freeman鏈碼的交叉裂縫分離算法。該算法加入了概率統(tǒng)計(jì)的因素,使追蹤裂縫的過(guò)程更加平滑;使用距離約束達(dá)到去除圖像噪聲的效果;對(duì)分割錯(cuò)誤的裂縫進(jìn)行了合并處理,減少了過(guò)分割情況的出現(xiàn)。實(shí)驗(yàn)結(jié)果表明,基于Freeman鏈碼的交叉裂縫算法對(duì)交叉裂縫的分割有著良好的效果,且算法計(jì)算量小、抗噪性強(qiáng),適于圖像的實(shí)時(shí)處理,并為巖心地質(zhì)裂縫的參數(shù)計(jì)算提供了更加精密的計(jì)算方式。
猜你喜歡
計(jì)算機(jī)應(yīng)用(2023年1期)2023-02-03 03:09:28
音樂(lè)天地(音樂(lè)創(chuàng)作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
計(jì)算機(jī)應(yīng)用(2022年1期)2022-02-26 06:57:42
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
數(shù)學(xué)小靈通(1-2年級(jí))(2021年3期)2021-04-13 01:01:58
計(jì)算機(jī)應(yīng)用(2021年3期)2021-03-18 13:44:48
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
數(shù)學(xué)小靈通·3-4年級(jí)(2017年11期)2017-11-29 01:35:50
