柔性三維力傳感器的研究進展
2021-06-04 09:21:10王孝飛張齊峰李玉霞黃梁松
電子元件與材料 2021年5期
王孝飛,張 鵬,張齊峰,李玉霞,黃梁松
(山東科技大學 電氣與自動化工程學院,山東 青島 266590)
當今,移動互聯網與智能技術的迅速發展使得柔性電子設備的需求出現巨大的缺口。其中柔性電子設備最關鍵的部件——柔性傳感器[1],成為了眾多研究者們的關注課題。柔性傳感器在醫療[2-5]、機器人[6-8]、環境監測[9]、農業生產[10]、軍工[11]等領域具有非常好的應用前景。目前,在柔性傳感器的研究成果中多數是對法向力[12-18]實現檢測,然而絕大多數的應用場景中不僅要求法向力的檢測,還要求剪切力的檢測[19]。因此,開發柔性三維力傳感器成為柔性傳感器研究領域的熱點。如今,柔性三維力傳感器已經在不同領域中應用,如研究人員通過檢測足底三維力的分布,幫助了殘疾人康復治療及專業運動員矯正動作[20];研究者將柔性三維力傳感器應用于人體假肢,滿足了對抓取物體的觸覺力的大小和方向的感知反饋要求[21];在智能機器人方面,靈巧手加裝柔性三維力傳感器,能夠使機器人完成更加精細、復雜的工作[22]。因此對于柔性三維力傳感器的深入設計研究具有重大意義。
本文首先闡述了柔性三維力傳感器的工作原理,總結了柔性三維力傳感器的結構、常用材料、解耦算法和三維力加載試驗平臺,介紹了柔性三維力傳感器的應用前景,最后展望了柔性三維力傳感器研究方向。
1 柔性三維力傳感器工作原理
柔性三維力傳感器按照工作原理可以分為壓電式[23]、壓阻式[24]、電容式[25]以及其他工作形式[26],表1 對不同工作原理的柔性三維力傳感器的優缺點進行了比較。

表1 不同工作原理的柔性三維力傳感器的比較Tab.1 Comparison of flexible three-dimensional force sensors with different operating principles
壓電式柔性三維力傳感器是基于壓電材料所具有的壓電效應來實現三維力的檢測。壓電效應是指壓電材料在受到外力時,其內部電子發生極化產生相應電壓來反映外部壓力的大小[27]。2016 年浙江大學俞平等[28]利用聚偏二氟乙烯膜(PVDF 薄膜)的壓電效應制備了一種三維力傳感器,如圖1(a)所示。壓阻式柔性三維力傳感器是基于壓敏材料所具有的壓阻效應來實現三維力檢測。壓阻效應是指壓敏材料在受到外力時自身阻值發生改變的現象[29]。壓敏材料可以分為應變計類和復合材料類。當加載外力時,應變計類材料的長度或橫截面積發生變化,使得自身阻值發生相應改變[30]。2013 年Lee 等[31]提出一種應變計類柔性三維力傳感器,如圖1(b)所示,他們利用聚合物材料SU-8 環氧樹脂作為接觸板和傳力柱,將加載力傳遞到四個“桌角”,每個“桌角”內外兩側均有一個Ni-Cr應變計,通過采集各個應變計的輸出實現三維力的檢測。復合材料類是通過將高分子聚合物材料與導電填充材料充分混合制得的[32]。2019 年術洋溢等[33]制備出一種基于力敏復合材料的柔性三維力傳感器,如圖1(c)所示。他們將聚酰亞胺(PI)與炭黑(CB)材料進行溶液混合制備出柔性力敏復合材料,并將其置于上下電極對之間,能夠實現三維力的檢測。電容式柔性三維力傳感器的原理是將力信號轉化為易檢測的電容信號。根據電容量表達式:

通過改變電極板間距d、正對面積A或介電層相對介電常數εr三個參數使得電容量發生變化。2008 年Lee 等[34]設計了一種可以檢測三維力的容性傳感器,如圖1(d)所示。當加載三維力時,四個輸出感應單元的電極板間距發生不同改變,引起對應的感應單元產生不同輸出,以此實現三維力的測量。此外,還有一些基于光學[26]、渦流效應[35]、電感[36]等原理開發了多種柔性三維力傳感器。2017 年Wang 等[35]基于渦流效應制備出一種柔性三維力傳感器,如圖1(e)所示。2018 年Kawasetsu 等[36]基于電感原理制備的柔性三維力傳感器,如圖1(f)所示。
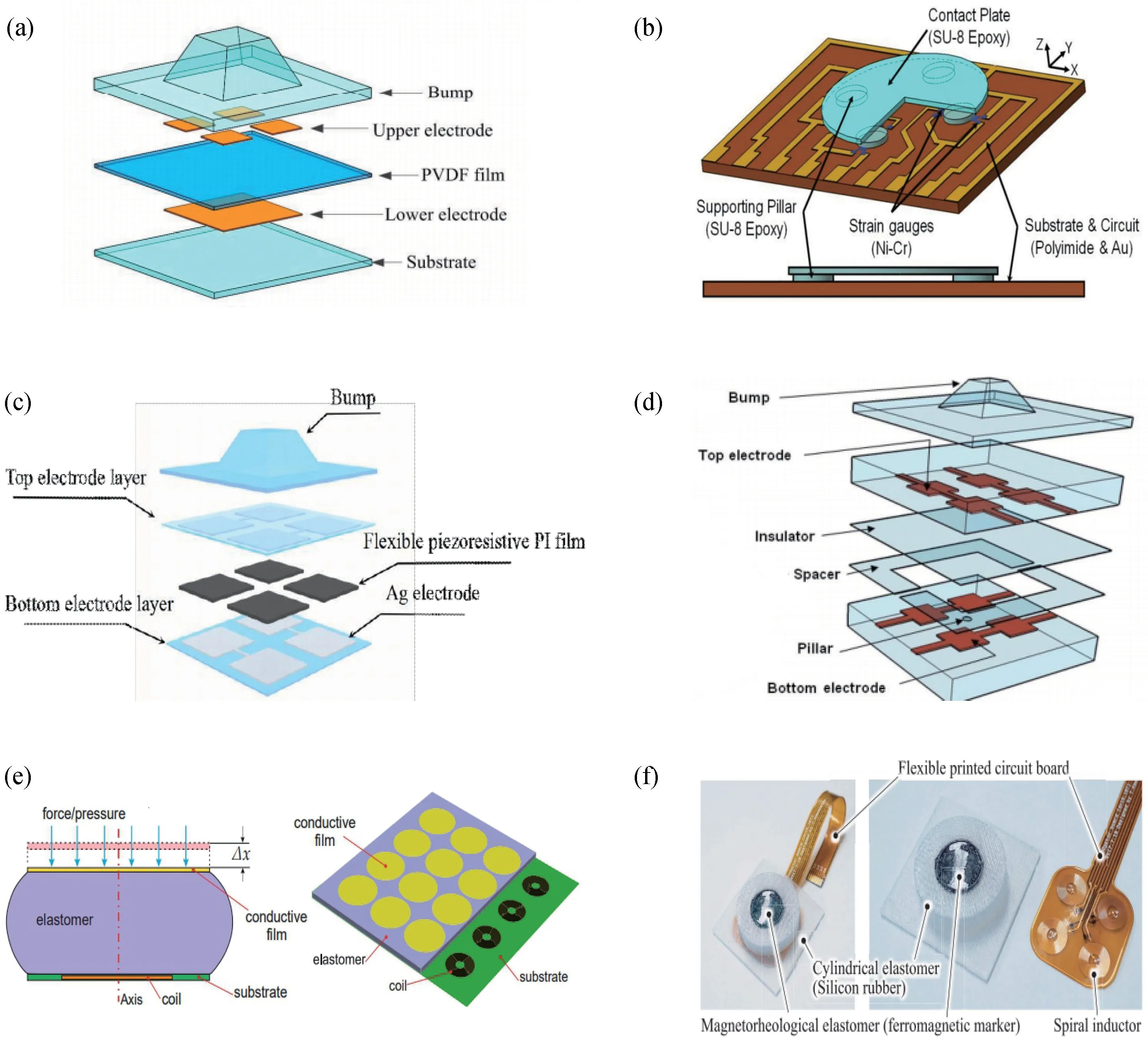
圖1 (a)一種壓電式三維力傳感器的示意圖[28];(b,c)分別為應變計類[31]和復合材料類[33]壓阻式三維力傳感器的示意圖;(d)基于變極距型電容式三維力傳感器的示意圖[34];(e,f)分別基于渦流效應[35]和電感原理[36]制備的三維力傳感器的示意圖Fig.1 (a)Schematic diagram of a piezoelectric three-dimensional force sensor[28];(b,c)Schematic diagrams of a strain gauge[31] and a composite[33] piezoresistive three-dimensional force sensors respectively;(d)Schematic diagram of a capacitive three-dimensional force sensor based on variable pole distance[34];(e,f)Schematic diagrams of three-dimensional force sensors based on eddy-current effect[35] and inductance principle[36] respectively
2 柔性三維力傳感器的結構
柔性三維力傳感器的結構設計對于傳感器能否實現三維力檢測起著至關重要的作用,并且影響著靈敏度、重復性等重要參數。從傳感器的整體結構來看,大部分的文獻采用三層式結構[20-22,25,28,31,33-36],即上下底層以及中間層。當加載三維力時,上層底板發生位移從而改變了壓電式、壓阻式傳感器應變材料的形變量或電容式傳感器極板間距和介電常數,導致感應單元的輸出發生變化。這種三層式的結構可以更加容易地分辨剪切力。2013 年,呂曉洲等設計了一種電容式傳感器,如圖2(a)所示,此傳感器上下底層采用PCB板,中間層采用4 個聚二甲基硅氧烷(PDMS)正方體分割柱位于傳感器四角以作支撐[37]。當加載法向力時,中間層受壓位移;當加載剪切力時,中間層會發生錯位扭曲。由于中間層結構的形變,使得傳感器驅動電極與感應電極之間的距離及重合面積改變,從而引起感應單元產生不同的電容輸出,以此實現三維力檢測。這種三層式結構在進行柔性三維力傳感器組裝時,存在一個關鍵技術問題即傳感器封裝對準問題。因為絕大多數傳感器是分層制作,逐層組裝,所以在整體結構封裝對準方面亟需探索新方法,以減少制作誤差,提高傳感器自身性能。此外還有采用內嵌式[38-40]和一體式[41-42]傳感器結構設計來實現三維力檢測。2019 年Choi 等[40]制備了一種內嵌式結構的傳感器,如圖2(b)所示。2011 年徐菲等[41]制備了一種一體式結構的傳感器,如圖2(c)所示。

圖2 (a)三層式[37]、(b)內嵌式[40]、(c)一體式[41]結構的三維力傳感器的示意圖Fig.2 Schematic diagrams of three-dimensional force sensors with (a) three-layer structure[37],(b) embedded structure[40] and (c) integrated structure[41]
從傳感器的電極結構來看,壓電式柔性三維力傳感器是上下電極結構[23,28,43]。當施加三維力時,各電極上積累的電荷不同,利用采集到的電壓信號實現三維力的檢測。2018 年Chen 等[43]制備了上下電極結構的壓電式傳感器,如圖3 所示。

圖3 壓電式上下電極結構的三維力傳感器的示意圖[43]Fig.3 Schematic diagram of a three-dimensional force sensor with piezoelectric upper and lower electrode structure[43]
壓阻式柔性三維力傳感器大多也采用上下電極結構[22,24,33,44],一方面是可以采集感應單元的輸出,另一方面當傳感單元在受力時,導電填充物與電極接觸面積增大可以使傳感單元與電極間的接觸電阻減小。2014 年Yang 課題組[44]制備的上下電極結構的壓阻式傳感器,如圖4 所示。

圖4 壓阻式上下電極結構的三維力傳感器的示意圖[44]Fig.4 Schematic diagram of a three-dimensional force sensor with piezoresistive upper and lower electrode structure[44]
電容式柔性三維力傳感器電極結構分為上下電極和同面電極[45]結構。2016 年Huang 等[45]基于邊緣效應制備的同面電極結構的柔性三維力傳感器,如圖5(a)所示。上下電極結構[20-21,25,34,37,46]不但可以做輸出單元的引出,而且當傳感器受到三維力時,利用電極板正對面積的變化[46-49]可以實現三維力檢測。2017 年Chandra 等[49]利用檢測上下極板正對面積變化的方法制備出電容式柔性三維力傳感器,如圖5(b)所示。
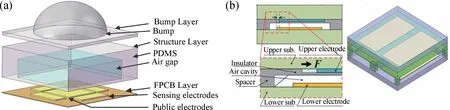
圖5 (a)電容式同面電極結構[45]和(b)上下電極結構[49]的三維力傳感器的示意圖Fig.5 Schematic diagrams of three-dimensional force sensors with (a) capacitive coplanar electrode structure[45] and(b) upper and lower electrode structure[49]
對于傳感器的中間層,壓電式和壓阻式柔性三維力傳感器中間層大多是放置敏感單元[22-24,28,31,33,43-44],當施加三維力時,敏感單元受力而產生不同的輸出信號,以此來實現測量三維力。將電容式柔性三維力傳感器中間層稱之為介電層,研究人員通過設計不同的介電層結構[25,50-53]來改善介電常數以及增強傳感器的形變能力,例如設計多層介電層結構[25],如圖6(a)所示;設計氣隙式的介電層結構使得上層電極可以浮動[50],如圖6(b)所示;設計微金字塔式介電層結構[53],如圖6(c)所示。通過巧妙地設計介電層結構可以大大提高傳感器的靈敏度。此外,目前越來越多的研究人員在上底板上附加一層凸起層,利用凸起結構[21-22,44-45,50-53]可以將三維力更好地傳遞給傳感元件,使傳感元件對三維力的感知更敏感,2011 年Lee 等[54]制備了帶有凸起結構的電容式柔性三維力傳感器,如圖6(d)所示。

圖6 (a)多層式[25]、(b)氣隙式[50]、(c)微金字塔式[53]介電層結構的電容式三維力傳感器的示意圖;(d)帶有凸起結構的電容式三維力傳感器的示意圖[54]Fig.6 Schematic diagrams of capacitive three-dimensional force sensors with (a) multi-layer[25],(b) air-gap[50] and (c) micro-pyramid[53]dielectric layer structures;(d)Schematic diagram of a capacitive three-dimensional force sensor with a raised structure[54]
3 柔性三維力傳感器的常用材料
柔性三維力傳感器上下襯底通常作為金屬電極的支撐,常見的襯底材料有聚對苯二甲酸乙二醇酯(PET)[46]、PI[52]等。PET 具有良好的透明度、耐摩擦、耐高溫等特性。PI 具有良好的電氣絕緣性、耐高溫性,且其化學性質穩定。柔性三維力傳感器電極材料常見的有金、銀、銅、鋁、鎂、鉻、鈦等,其中金、銀的電阻率較小,但價格昂貴,而銅的電阻率相對較低,且價格適中,所以大多數研究人員選用銅作為電極材料[55]。對于傳感器的凸起結構,研究人員大多采用PDMS 作為凸起材料[44-45]。因為凸起結構在受力時會出現滯回現象,所以應當盡可能地提高凸起材料的楊氏模量來減小滯回現象。研究人員可以通過改變PDMS 中原液和固化劑的質量配比或者將PDMS 與其他材料混合來提高材料的楊氏模量。對于壓電式和壓阻式柔性三維力傳感器來說,敏感材料是傳感器的核心材料。研究人員通過探索使用壓電薄膜和壓電材料復合物來提高傳感器的靈敏度、響應速度及重復性等,如PVDF 薄膜[23]以及PVDF 粉末、碳納米管(CNT)和PDMS 三者聚合物[56]。研究人員通過制作新型力敏復合材料,如PI 與炭黑的聚合物[33]、硅橡膠與炭黑和石墨烯的聚合物[57]、PDMS 與多壁碳納米管的聚合物[58]等,以及應變計材料[31,59]來提高傳感器對三維力信息的感知能力。對于電容式柔性三維力傳感器,常見的中間介電層材料有PDMS[49]和其他柔性材料如氟硅橡膠[25]。當傳感器受到相同外力時,將楊氏模量盡量小的PDMS 作為介電層材料,可以使得介電層的形變量較大,傳感器的靈敏度可以得到較大提高。
4 柔性三維力傳感器解耦方法歸納
目前,在所整理的文獻中主要有如下幾種解耦方法。第一種:通過定義中間參數,將三維力與感應單元的輸出建立關系,即正壓力與感應單元輸出建立均值關系,剪切力與感應單元輸出建立差值關系,來實現三維力的解耦與測量[24,28,53]。如西安電子科技大學楊嘉怡定義上下底板間距為中間變量,通過中間變量建立感應單元輸出與三維力分量的關系,實現三維力測量[24]。目前這種解耦方法被廣泛應用。第二種:根據傳感器結構和材料的特性來建立相應的解耦算法。如Lee 等[54]通過彈性力學分析了傳感器在三維力下的受力狀態,并提出了基于彈性力學的三維力解耦模型;Yao 等[60]基于所設計的傳感器的結構及材料建立了數學解耦模型;徐菲[42]基于力敏導電橡膠的理想力學特性建立了解耦模型,但此傳感器內部交叉點較多,使得解耦變得相對困難。第三種:研究人員利用神經網絡方法,對采集到的輸出值解耦出傳感器所受到的三維力的信息[38-39]。如胡廣宇等[38]利用BP 神經網絡算法,通過采集到的電壓值解耦出傳感器所受的三維力信息。其他方式還有:Lee 等[31]利用新的解耦方法即歸一化力分量來解耦所施加的三維力;Choi 等[40]通過建立氣室的壓力變化與三維分力的關系建立解耦模型。目前,對于柔性三維力傳感器的解耦算法大多采用近似線性化、理想化處理,因此不能準確地解耦三維力,故對于柔性三維力傳感器的解耦算法值得進一步探索研究,例如加入尋優算法、修正函數、機器學習算法等來豐富當前的解耦算法,以提高解耦的準確度。
5 三維力加載實驗平臺
采用三維力加載平臺對制作的傳感器進行性能測試是必不可少的。而不同的力加載平臺會對傳感器的性能評估產生一定影響,選用合適、精準、可靠的力加載平臺是對傳感器性能準確評估的前提。目前,在所整理的文獻中主要有四類力加載平臺。第一類是由六維力/扭矩傳感器和x-y軸位移平臺組成的力加載實驗平臺,例如哈爾濱工業大學Zhang 課題組[61]所使用的三維力加載平臺,如圖7(a)所示,其測量范圍是0~200 N,分辨率約為0.02 N。該類型測力范圍大,但精度不高。第二類是由一個單軸測力計分別搭配垂直加載棒和“L”型加載棒及x-y軸位移平臺組成,例如合肥工業大學Huang 課題組[45]所使用的三維力加載平臺,如圖7(b)所示,其單軸測力計測量范圍是0~10 N,分辨率約為0.01 N。該類型對于測量無凸起結構的傳感器而言操作相對困難。第三類是由兩個單軸測力計和兩個x-y軸位移平臺組成,例如西安電子科技大學Lyu 課題組[62]所使用的三維力加載平臺,如圖7(c)所示,其測力計測量范圍是0~5 N,分辨率約為0.001 N。該類型測量精度高但測力范圍小,且水平方向測力計需調平。第四類是由三維位移平臺和商用三維力測量平臺組成,例如浙江大學Mei 課題組[63]所使用的三維力加載平臺,如圖7(d)所示,其測量范圍是0~50 N,分辨率約為0.01 N。該類型測量范圍較大,但價格相對昂貴。
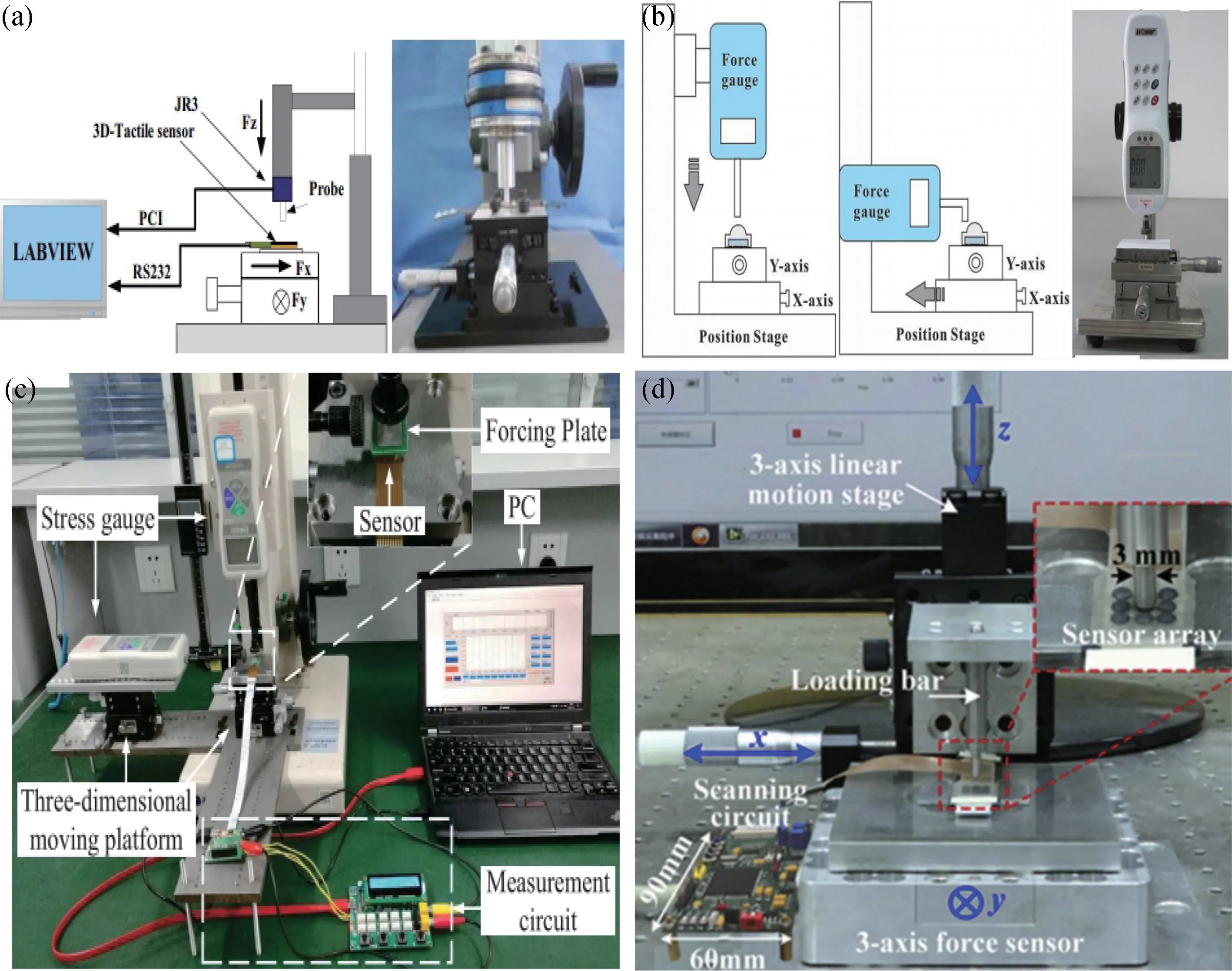
圖7 (a)Zhang 課題組[61];(b)Huang 課題組[45];(c)Lyu 課題組[62]和(d)Mei 課題組[63]采用的三維力加載實驗平臺示意圖Fig.7 Schematic diagram of a three-dimensional force-loading test platform adopted by (a) Zhang's research group[61];(b)Huang's research group[45];(c)Lyu research group[62];(d)Mei's research group[63]
6 三維力柔性傳感器的應用
隨著科研人員的努力、科技的進步、設備的需求,柔性三維力傳感器將會在更多領域發揮作用。近年來,Surapaneni 等[55]設計的柔性三維力傳感器應用于人行走過程中的步態分析,能夠估計出行走過程中人的大致速度和行走距離,如圖8(a)所示。西安電子科技大學張峰[20]將柔性三維力傳感器應用于足底界面應力檢測,對臨床醫學、生物力學和體育訓練的研究和發展有一定的推動作用,如圖8(b)所示。Laszczak 等[64]將柔性三維力傳感器應用于人工假肢使用情況的監測,能夠有效防止假肢在早期破裂,這有利于促進人工假肢智能化的進一步發展,如圖8(c)所示。合肥工業大學毛磊東[65]將柔性三維力傳感器應用于機械手上實現抓取物體及滑動檢測,如圖8(d)所示。現階段三維力傳感器應用所面臨的問題主要在于傳感器的靈敏度、可靠性以及成本等方面,此外針對不同應用環境,對傳感器的大小、耐熱性、抗干擾性等方面也提出一定的要求。
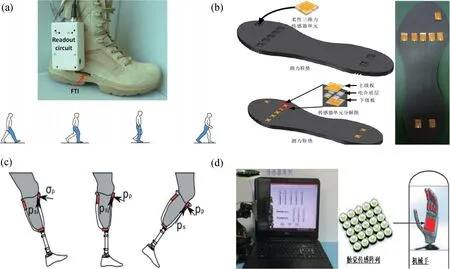
圖8 柔性三維力傳感器應用于(a)步態分析[55];(b)足底界面應力檢測[20];(c)人工假肢使用情況監測[64];(d)機械手[65]的示意圖Fig.8 Schematic diagrams of flexible three-dimensional force sensors applied to (a) gait analysis[55],(b)stress detection at plantar interface[20],(c) monitor the use of artificial limbs[64] and (d) manipulator[65]
7 總結與展望
近年來,柔性三維力傳感器的發展非常迅速,在結構、材料、解耦等方面呈現出多樣性發展的態勢,國內外研究人員陸續制備出靈敏度高、穩定性好、檢測能力強的柔性三維力傳感器,這些傳感器推動了人工假肢、機器人、運動監測等領域的進一步發展。但是,柔性三維力傳感器仍存在許多尚未解決的問題。例如,封裝對準技術不成熟導致制作出的傳感器初始值各不相同,無法實現量產,而且目前并未對柔性三維力傳感器的整體性能提出定量指標。最重要的是,柔性三維力傳感器在結構及材料方面仍需要大的技術突破來提高三維力檢測能力及其性能參數。在性能方面,相較于傳統的傳感器,柔性三維力傳感器仍有較大的進步空間。因此,探索新結構與研究新材料以制備出高性能的傳感器是今后柔性三維力傳感器的研究重點。同時,未來柔性三維力傳感器仍然會朝著微型化、可陣列化、多功能化等方向繼續發展。柔性三維力傳感器將在智能機器人、環境監測、醫療等應用場景中展現出越來越重要的作用。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
哲學評論(2021年2期)2021-08-22 01:53:34
數學小靈通(1-2年級)(2020年9期)2020-10-27 03:24:18
當代貴州(2019年41期)2019-12-13 09:28:56
中華詩詞(2019年7期)2019-11-25 01:43:04
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中國共青團(2015年7期)2015-12-17 01:24:38