機(jī)載俯仰多通道氣象雷達(dá)地雜波抑制新算法*
2021-06-04 04:11:54
艦船電子工程 2021年5期
關(guān)鍵詞:信號(hào)
(南京航空航天大學(xué)雷達(dá)成像與微波光子技術(shù)教育部重點(diǎn)實(shí)驗(yàn)室 南京 211106)
1 引言
機(jī)載氣象雷達(dá)通過發(fā)射和接收電磁波探測(cè)航線或目標(biāo)區(qū)域的氣象情況,從而預(yù)警飛行員規(guī)避惡劣的氣象狀況(雷暴雨,湍流等),極大的保證了航路的安全。由于氣象目標(biāo)的性質(zhì)和區(qū)域體分布的特點(diǎn)[1],實(shí)際處理中主要通過估計(jì)氣象回波的統(tǒng)計(jì)特性區(qū)分氣象目標(biāo)的類別和強(qiáng)度。當(dāng)機(jī)載氣象雷達(dá)處于下視狀態(tài)時(shí),回波中存在大量的地面散射回波(地雜波),干擾甚至淹沒氣象回波,導(dǎo)致高強(qiáng)度氣象“虛警”概率提升,而抑制地雜波可能造成的氣象目標(biāo)能量損失又會(huì)導(dǎo)致氣象目標(biāo)誤檢,影響飛行員的判斷。因此如何在抑制地雜波的同時(shí),盡可能地保留氣象信息,是氣象雷達(dá)信號(hào)處理里面的一個(gè)關(guān)鍵問題。
氣象雷達(dá)通常安裝于飛機(jī)前端,天線前視掃描的工作方式以及載機(jī)的運(yùn)動(dòng)使得回波的多普勒譜展寬,從而造成雜波與氣象頻譜重疊等問題[2],使得常規(guī)的頻域?yàn)V波方法效果不理想。而在快時(shí)間域分離地雜波的方法,比如波束多掃描法[3],基于地形數(shù)據(jù)庫(kù)的地雜波抑制法[4],其主要使用雷達(dá)在不同下俯角時(shí)得到的數(shù)據(jù),計(jì)算分離處于不同距離門的氣象和地,當(dāng)氣象和地處于等距離環(huán)上時(shí),抑制效果不理想。但此時(shí)氣象和地相對(duì)于雷達(dá)的下俯角不同,可以通過俯仰排列的天線陣列進(jìn)行地雜波抑制[6]。文獻(xiàn)[7]提出了一種基于空域?yàn)V波(相控陣)的氣象雷達(dá)地雜波抑制方法,采用魯棒的自適應(yīng)零點(diǎn)波束形成算法抑制地基氣象雷達(dá)回波中的地雜波,并通過實(shí)測(cè)數(shù)據(jù)驗(yàn)證了使用空域?yàn)V波方法進(jìn)行地雜波抑制的可行性。
在上述空域?yàn)V波思想的基礎(chǔ)上,根據(jù)機(jī)載雷達(dá)的數(shù)據(jù)接收空間幾何關(guān)系,以及氣象目標(biāo)空間體分布的特點(diǎn),本文采用垂直(俯仰維)排列的天線陣進(jìn)行自適應(yīng)波束形成,并提出了一種基于協(xié)方差矩陣重構(gòu)的魯棒波束形成算法進(jìn)行地雜波抑制。通過仿真實(shí)驗(yàn)和仿真數(shù)據(jù)處理,證明了該方法收斂速度快,所需樣本數(shù)少,并能夠有效提高算法對(duì)協(xié)方差矩陣失配的魯邦性,能夠在保留氣象信息的同時(shí),抑制地雜波。
本文結(jié)構(gòu)安排如下:首先建立了機(jī)載俯仰多通道接收系統(tǒng)氣象雷達(dá)的回波信號(hào)模型;在此基礎(chǔ)上,提出了基于協(xié)方差矩陣重構(gòu)(CMR)的魯棒波束形成算法;最后通過仿真實(shí)驗(yàn)和仿真數(shù)據(jù)處理,證明了算法的有效性。
2 機(jī)載俯仰多通道雷達(dá)回波信號(hào)模型
當(dāng)雷達(dá)以一定的下俯角發(fā)射和接收脈沖時(shí),回波在同一距離門上會(huì)同時(shí)存在氣象回波和地雜波,如圖1所示。由于地面散射點(diǎn)后向散射功率極強(qiáng),在快時(shí)間域上,地雜波會(huì)淹沒氣象回波,使得通過時(shí)域進(jìn)行雜波抑制的方法效果很不理想,無(wú)法保證抑制地雜波的同時(shí)保持氣象回波不失真。
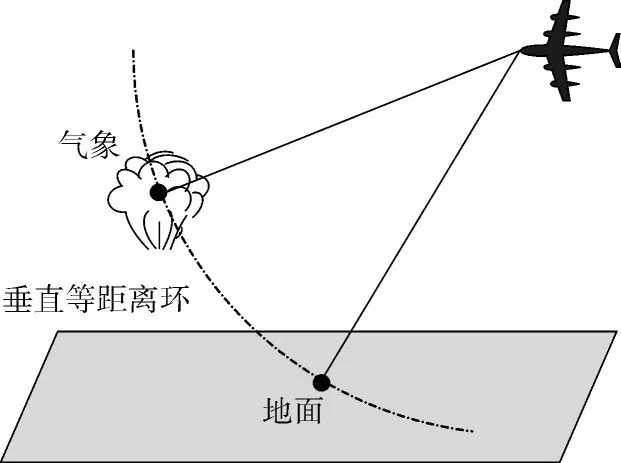
圖1 氣象雷達(dá)空間幾何關(guān)系
從圖1中可以看出,在俯仰維上,氣象目標(biāo)和地雜波與雷達(dá)之間的夾角存在較大差異,因此可以根據(jù)該空域信息,分離氣象回波和地雜波,從而達(dá)到抑制地雜波的目的。我們可以采用垂直排列的陣列雷達(dá)(俯仰維相控陣?yán)走_(dá)),通過空域自適應(yīng)處理的方法,在保留氣象信息的同時(shí),抑制回波信號(hào)中的地雜波。
本文研究的地雜波僅考慮地面的回波,而氣象目標(biāo)為體目標(biāo),可將波束范圍內(nèi)的氣象目標(biāo)近似離散化為m個(gè)氣象散射點(diǎn),其接收數(shù)據(jù)示意圖如圖2所示,由于高度不同,在俯仰維上,氣象目標(biāo)和地雜波與雷達(dá)之間的夾角存在差異,因此可以根據(jù)該空域信息,分離氣象回波和地雜波,從而達(dá)到抑制地雜波的目的。我們可以采用垂直排列的陣列雷達(dá)(俯仰維相控陣?yán)走_(dá)),通過空域自適應(yīng)處理的方法,在保留氣象信息的同時(shí),抑制回波信號(hào)中的地雜波。
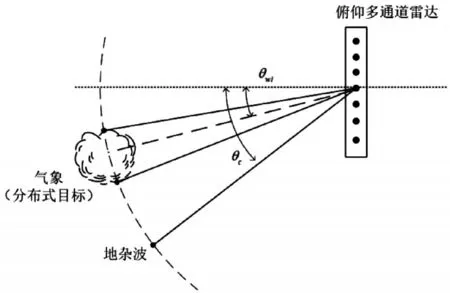
圖2 多通道雷達(dá)接收數(shù)據(jù)示意圖
不妨設(shè)相控陣天線為均勻線陣(ULA),其工作方式為一發(fā)多收模式,雷達(dá)波長(zhǎng)為λ,通道數(shù)為N,陣元間隔為d。為防止空域混疊,陣列滿足半波長(zhǎng)間隔條件,即d=λ/2。在回波數(shù)據(jù)錄取中,某一距離環(huán)內(nèi)同時(shí)存在地雜波和氣象目標(biāo)散射點(diǎn),俯仰角分別為θc和θwi,其中θwi指第i個(gè)氣象目標(biāo)散射點(diǎn)對(duì)應(yīng)的下俯角(i≤m),上標(biāo)T表示轉(zhuǎn)置運(yùn)算。雷達(dá)發(fā)射線性調(diào)頻信號(hào),接收回波并進(jìn)行脈沖壓縮后,該距離門接收信號(hào)的空域快拍(N×1維列向量)可表示為

其中,n表示快拍中的接收機(jī)白噪聲分量,與其他分量相互獨(dú)立,αwi、αc分別表示第i個(gè)氣象目標(biāo)離散點(diǎn)回波和地雜波的復(fù)幅度,分別為第i個(gè)氣象目標(biāo)離散點(diǎn)回波和地雜波的理論空域?qū)б噶浚煞謩e表示為

一般而言,可假設(shè)接收信號(hào)中的地雜波和氣象分量統(tǒng)計(jì)獨(dú)立并且期望為零,則接收信號(hào)x對(duì)應(yīng)的協(xié)方差矩陣可表示為

其中,上標(biāo)H表示共軛轉(zhuǎn)置運(yùn)算,E{}·為求數(shù)學(xué)期望運(yùn)算,Rs和Rc+n分別表示期望信號(hào)的協(xié)方差矩陣和雜波與噪聲的協(xié)方差矩陣。
假設(shè)陣列處理的權(quán)矢量為N×1維列向量w,,則輸出信號(hào)可以表示為

俯仰維相控陣?yán)走_(dá)的自適應(yīng)信號(hào)處理流程可以由圖3來(lái)表示。對(duì)每個(gè)通道進(jìn)行自適應(yīng)加權(quán)后,其輸出功率可以表示為
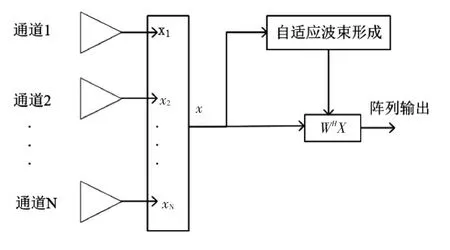
圖3 信號(hào)處理流程

可以列出陣列輸出信雜噪比如式(7)所示:

在高斯雜波及噪聲的背景下,最優(yōu)的陣列信號(hào)處理準(zhǔn)則,即為最大化輸出信雜噪比準(zhǔn)則(MSCNR),能夠在確定虛警率下最大化檢測(cè)概率。傳統(tǒng)的自適應(yīng)波束形成算法如最小均方無(wú)畸變準(zhǔn)則(MVDR)等,其假定目標(biāo)來(lái)向角唯一,設(shè)為θ'。此時(shí)期望信號(hào)的輸出功率可以表示為

其中s(θ')是期望信號(hào)的空域?qū)б噶浚?是期望信號(hào)回波的復(fù)幅度。為了保證期望信號(hào)不失真 ,設(shè)θ'方 向 的 自 適 應(yīng) 天 線 增 益 為 1,即。此時(shí)MSCNR可以表示為

根據(jù)拉格朗日乘子法,可以解得,在期望信號(hào)來(lái)向角唯一時(shí),最優(yōu)權(quán)矢量為

3 基于協(xié)方差矩陣重構(gòu)的魯棒波束形成算法
氣象雷達(dá)探測(cè)的目標(biāo)主要是群聚性彌散目標(biāo),在空間上呈無(wú)序性體分布[1]。從數(shù)學(xué)上表示,期望信號(hào)的協(xié)方差矩陣Rs的秩大于1,也就是說(shuō)其期望信號(hào)來(lái)向角個(gè)數(shù)大于1個(gè),無(wú)法用單個(gè)期望信號(hào)來(lái)向角約束計(jì)算最優(yōu)權(quán)矢量。
為了提高氣象信號(hào)的檢測(cè)概率,需要盡可能的減少雜波和噪聲功率,即最大化陣列輸出信雜噪比;為了保證陣列輸出的期望信號(hào)不失真,需設(shè)立約束使輸出的期望信號(hào)功率等于常數(shù),即wHRsw=t,由式(7)可知,權(quán)矢量的倍乘并不會(huì)改變輸出信雜噪比的大小,因此不妨設(shè)t=1。綜合上述條件,此時(shí)MSCNR可以表示為
根據(jù)拉格朗日乘子法,設(shè)代價(jià)函數(shù)為

其中λ為拉格朗日乘子,將代價(jià)函數(shù)對(duì)加權(quán)向量求導(dǎo)等于零可以得到


可以得出當(dāng)λ最小時(shí),陣列輸出的信雜噪比最小。由式(14)可以推出,MSCNR準(zhǔn)則下分布式目標(biāo)的最優(yōu)權(quán)矢量即為矩陣的最大特征值對(duì)應(yīng)的特征向量,公式表示為

其中函數(shù)Γ(X)表示矩陣X最大特征值對(duì)應(yīng)的特征向量。
在氣象回波處理中,設(shè)雷達(dá)波束中心在俯仰向角度為ξ,為了減少氣象信號(hào)的功率損失,不妨設(shè)ξ角度對(duì)應(yīng)的自適應(yīng)天線增益為1,即wHs()ξ=1,在該約束條件下可以得到最優(yōu)權(quán)矢量為
由式(14)可知,Rc+n可以用R等效替代。在實(shí)際處理中一般用樣本協(xié)方差矩陣來(lái)估計(jì)R[8],如式(17)所示,其中,K為信號(hào)樣本數(shù),Rs一般直接用理論期望信號(hào)協(xié)方差矩陣來(lái)替代,樣本矩陣求逆(SMI)算法[9]。但無(wú)論是理論期望信號(hào)協(xié)方差矩陣或是樣本估計(jì)的信號(hào)協(xié)方差矩陣都與真實(shí)的協(xié)方差矩陣之間存在一定的差距,即協(xié)方差矩陣失配問題。而SMI算法對(duì)該問題具有弱魯棒性[11],并且SMI算法的收斂速度低,難以滿足實(shí)際處理的需求。
為了提高算法對(duì)協(xié)方差矩陣失配的魯棒性,并提高算法的收斂速度,本文基于協(xié)方差矩陣重構(gòu)(CMR)的MSCNR方法[12],重構(gòu)信號(hào)協(xié)方差矩陣以及雜波和噪聲協(xié)方差矩陣,從而進(jìn)行魯棒波束形成。其重構(gòu)方法可以表示為

其中s(θ)為對(duì)應(yīng)θ角的空域?qū)б噶浚琾(θ)為回波的空域功率譜密度,通過回波MVDR譜估計(jì)得到,即

代入式(16)可以得到基于協(xié)方差矩陣重構(gòu)的分布式氣象目標(biāo)波束形成最優(yōu)權(quán)矢量:

4 仿真實(shí)驗(yàn)結(jié)果與分析
假設(shè)接收陣列為均勻線陣(ULA),其實(shí)驗(yàn)參數(shù)設(shè)置如表1所示,計(jì)算本文提出的CMR算法的收斂速度,其對(duì)比算法是SMI,對(duì)角加載的樣本矩陣求逆法(LSMI)以及最壞情況下最優(yōu)算法(WPO),結(jié)果如圖4所示。其中LSMI中的加載因子為噪聲功率5dB,做30次Monte Carlo試驗(yàn),做平均后得到收斂速度曲線如圖4所示。可以明顯看出基于CMR算法的收斂速度遠(yuǎn)大于SMI和LSMI以及最壞情況下最優(yōu)算法,并且在小樣本下,CMR算法能夠?qū)崿F(xiàn)較小的信雜噪比損耗,能很好地滿足實(shí)際處理時(shí)的需求。
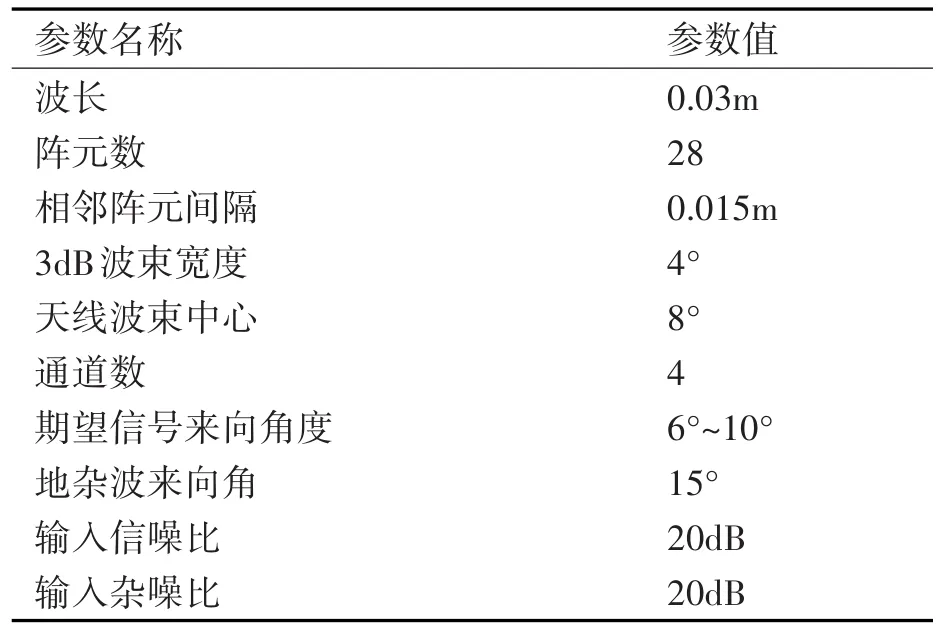
表1 CMR算法性能驗(yàn)證實(shí)驗(yàn)參數(shù)列表
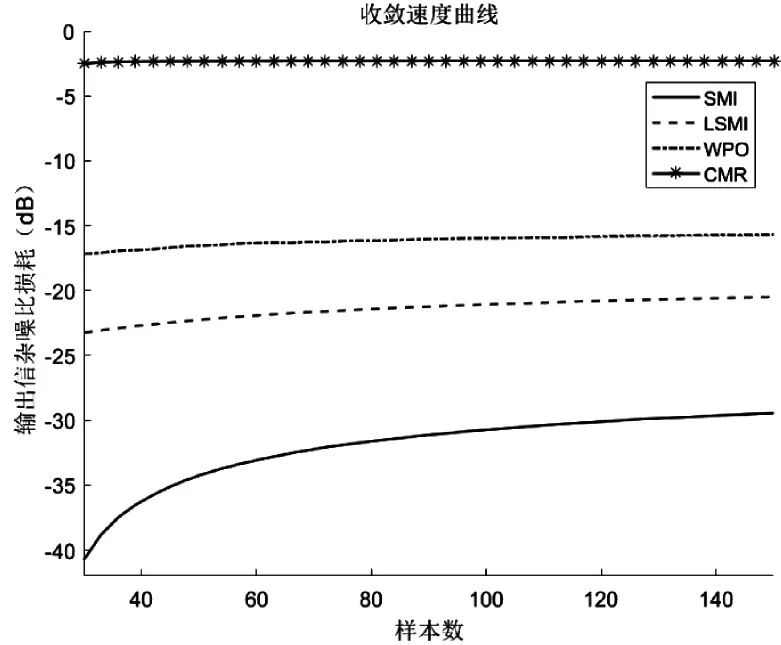
圖4 收斂速度曲線
為了進(jìn)一步證明本文提出的算法在分布式期望信號(hào)條件下的算法性能,本文重點(diǎn)采用自適應(yīng)方向圖(AP)和信雜噪比改善因子(SCNR-IF)對(duì)算法的性能進(jìn)行分析,其中改善因子定義為輸出端(自適應(yīng)處理后)SCNR與輸入端(自適應(yīng)處理前)SCNR的比值。
其余實(shí)驗(yàn)條件不變,計(jì)算CMR算法得到的AP如圖5所示,自適應(yīng)天線方向圖在雜波所在位置形成了較深的凹口,證明了其具備對(duì)雜波的抑制能力。此外,AP在目標(biāo)所在位置形成了主波束,從而保證了氣象目標(biāo)能夠無(wú)失真地通過波束形成器。
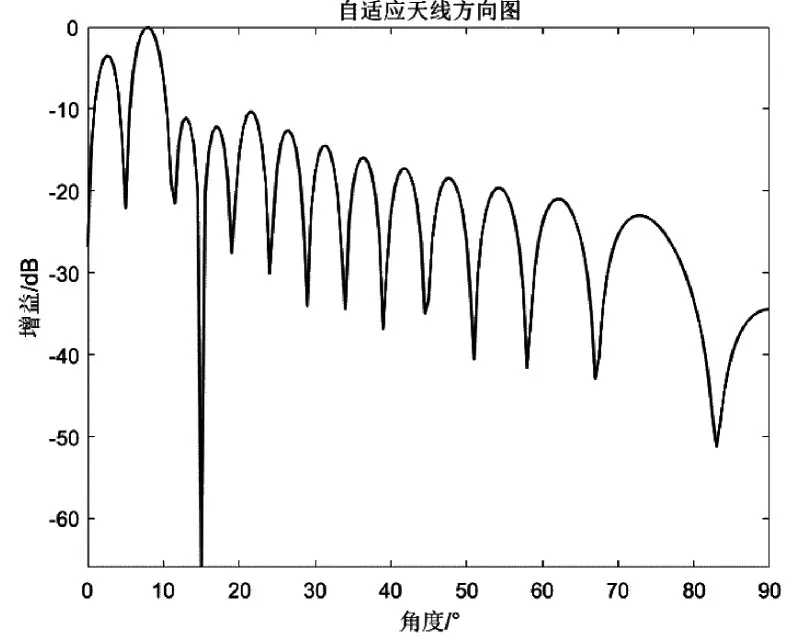
圖5 自適應(yīng)天線方向圖
其余條件不變,計(jì)算CMR算法雜波入射角度在(-10°,90°)范圍內(nèi)的SCNR-IF如圖 6所示,可以看出除氣象目標(biāo)所在方向(主瓣內(nèi))外,該算法均能夠獲得較高的SCNR改善,證明了算法具備較好的雜波抑制性能;同時(shí)在氣象目標(biāo)所在方向內(nèi),其曲線凹口平緩,能夠減少主瓣內(nèi)分布式期望信號(hào)的損失。
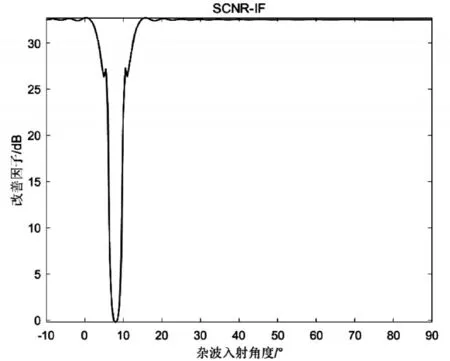
圖6 改善因子
為了進(jìn)一步驗(yàn)證本文提出方法的有效性,進(jìn)行俯仰四通道氣象仿真回波數(shù)據(jù)處理。其仿真條件設(shè)置如表2所示,雷達(dá)系統(tǒng)采取一發(fā)多收體制,在考慮地球曲率條件下,產(chǎn)生一組回波,并經(jīng)過脈壓后,氣象目標(biāo)回波數(shù)據(jù)如圖7所示,含有氣象、地雜波和噪聲的數(shù)據(jù)如圖8所示,其中紅色矩形的位置處的氣象回波被處于等距離環(huán)上的地雜波所淹沒。對(duì)圖8對(duì)應(yīng)數(shù)據(jù)采用CMR算法進(jìn)行雜波抑制處理,得到雜波抑制后的數(shù)據(jù),如圖9所示,其中樣本協(xié)方差矩陣估計(jì)的樣本點(diǎn)數(shù)為8個(gè),兩倍于通道數(shù)。
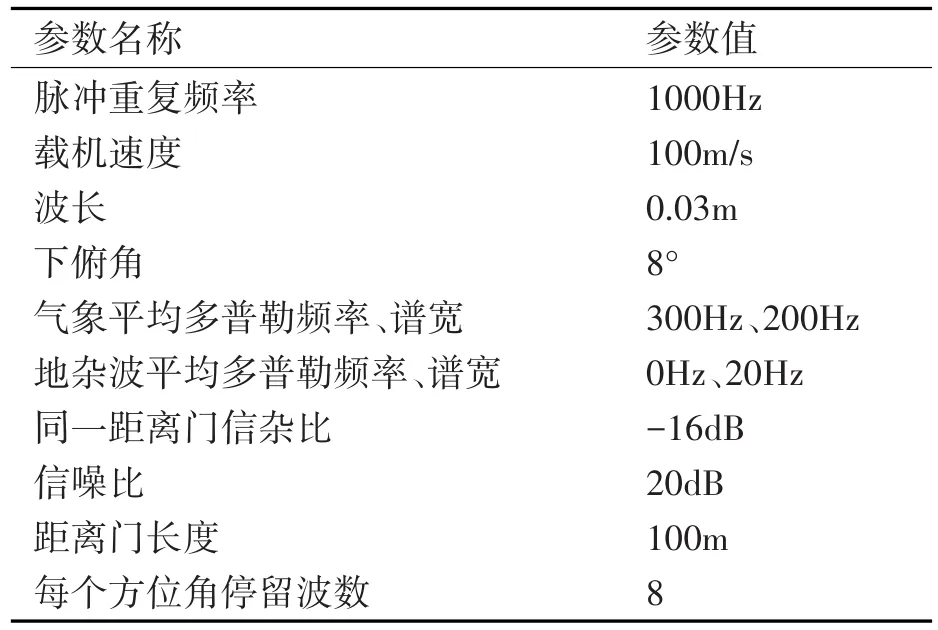
表2 機(jī)載四通道氣象回波仿真參數(shù)列表
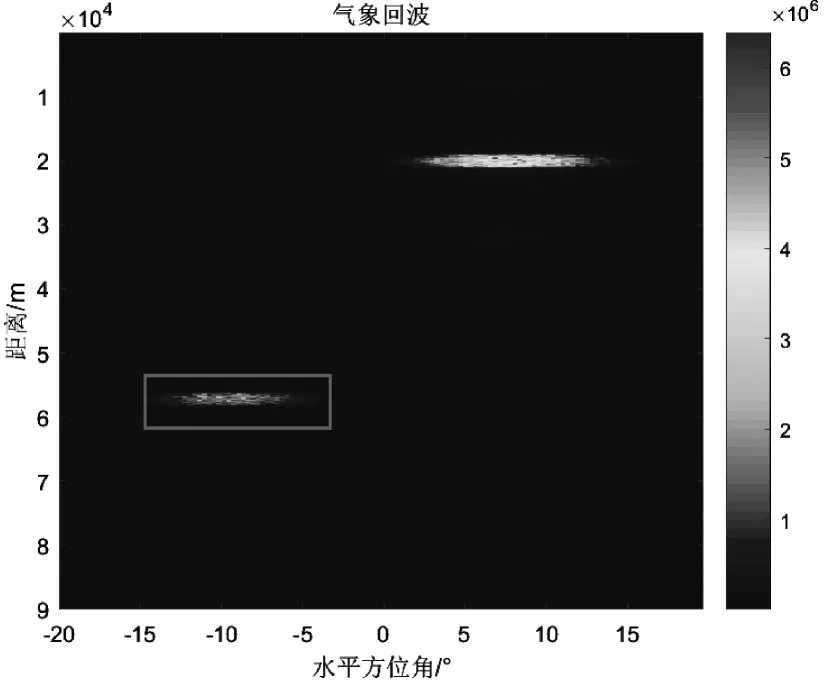
圖7 氣象目標(biāo)回波信號(hào)
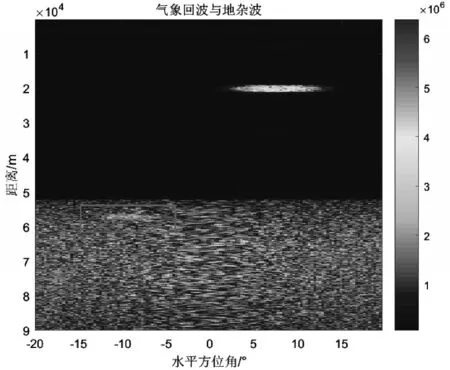
圖8 仿真氣象回波(含噪聲與地雜波)
從圖9中可以看出,雜波抑制后,氣象回波等距離門上的地雜波以及噪聲被基本抑制,可以直接從陣列輸出中在快時(shí)間域(距離向)上提取出主瓣氣象回波。而距雷達(dá)更遠(yuǎn)(近地)的地雜波因?yàn)樵诶走_(dá)主瓣內(nèi),無(wú)法使用波束形成算法進(jìn)行抑制,殘留在陣列輸出的數(shù)據(jù)中。
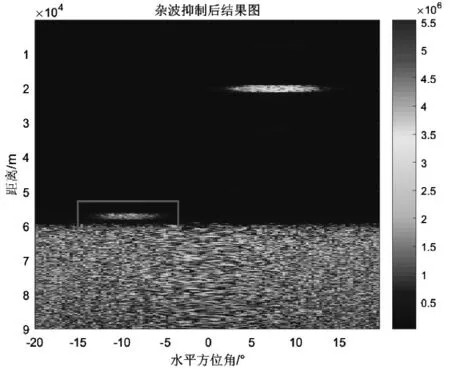
圖9 CMR算法雜波抑制輸出結(jié)果
在圖8中,選取第566,567,568距離門,-11.9°水平方位角位置的空域快拍信號(hào),計(jì)算其MVDR譜,并用CMR算法計(jì)算自適應(yīng)天線方向圖,其結(jié)果如圖10與圖11所示。可以看出MVDR譜存在兩個(gè)峰,一個(gè)峰位于主瓣內(nèi),是氣象信號(hào),因?yàn)闅庀笫欠植际侥繕?biāo),其MVDR譜較寬,對(duì)應(yīng)角度的自適應(yīng)天線增益趨于1,能夠保留氣象信號(hào);另一個(gè)峰位于旁瓣內(nèi),是地雜波,對(duì)應(yīng)角度自適應(yīng)天線方向圖存在深的凹口,能夠抑制地雜波。
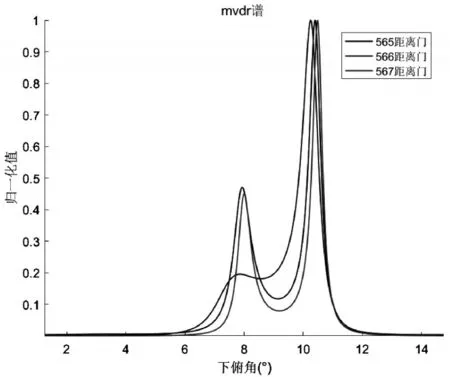
圖10 MVDR譜
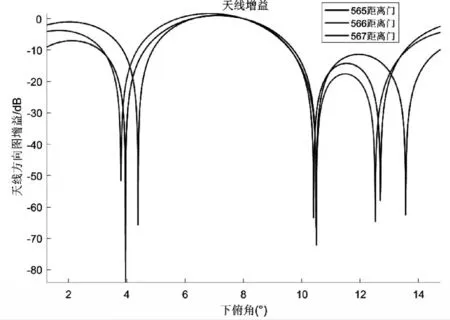
圖11 自適應(yīng)天線方向圖
從回波強(qiáng)度上進(jìn)行分析,取圖8與圖9對(duì)應(yīng)數(shù)據(jù)距離門為[564,575]的區(qū)域(氣象所在距離門),進(jìn)行距離門平均后,畫出其剖面圖,如圖12所示,從剖面圖上可以看出,與氣象處于同一距離門的地雜波得到基本抑制,氣象回波得到保留,驗(yàn)證了CMR算法的有效性。
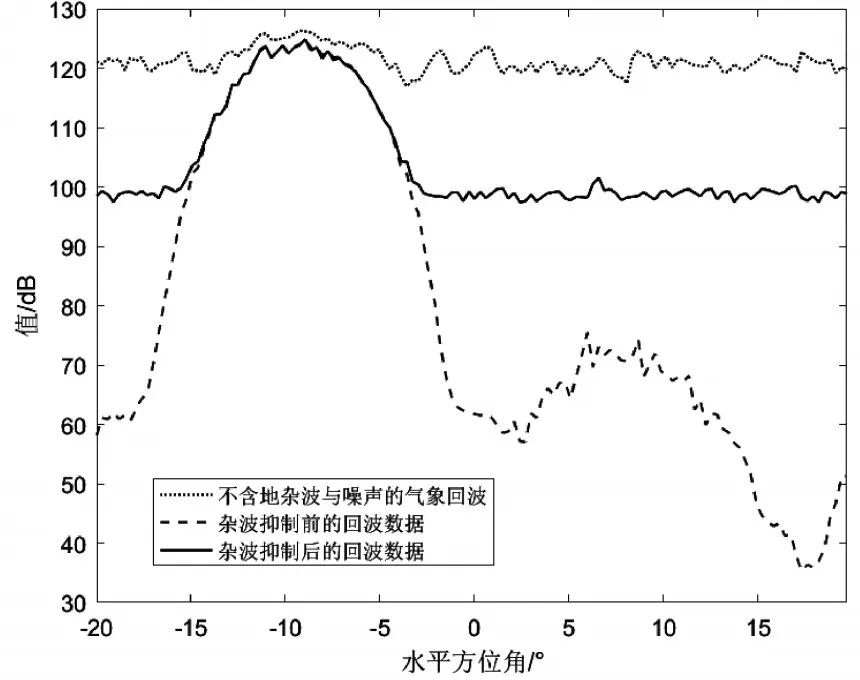
圖12 564-575距離門平均后剖面圖
從回波多普勒譜上進(jìn)行分析,取圖8,圖9,圖10對(duì)應(yīng)數(shù)據(jù)第568距離門,水平掃描角度-11.9°的空域快拍信號(hào)進(jìn)行頻譜計(jì)算。進(jìn)行多普勒補(bǔ)償,抵消載機(jī)對(duì)地的速度影響后,得到多普勒頻譜圖,其結(jié)果如圖13所示。從多普勒譜分析可以得出,回波中地雜波的成分(零頻附近)被基本抑制,并且雜波抑制后的氣象頻譜主瓣損失小,形狀與氣象目標(biāo)回波基本一致。
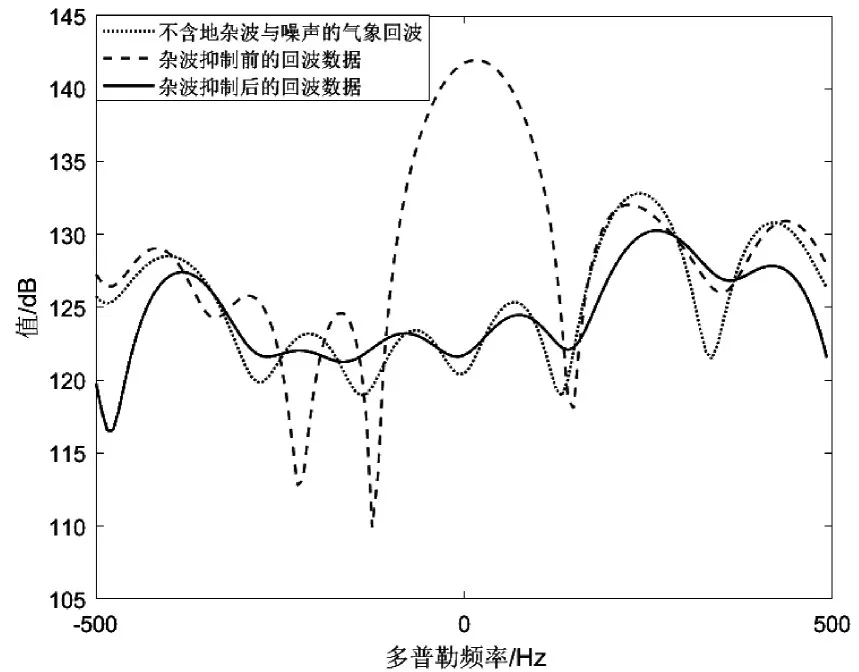
圖13 多普勒頻譜
通過仿真數(shù)據(jù)處理,證明了本文提出的基于協(xié)方差矩陣重構(gòu)的魯棒波束形成算法對(duì)協(xié)方差矩陣失配問題有較高的魯棒性,可以有效保留機(jī)載氣象雷達(dá)回波中的氣象信息,并且抑制地雜波,證明了CMR算法對(duì)機(jī)載俯仰多通道氣象雷達(dá)雜波抑制的有效性和可行性。
5 結(jié)語(yǔ)
機(jī)載氣象雷達(dá)處于下視狀態(tài)時(shí),回波在同一距離門上會(huì)出現(xiàn)地雜波污染氣象的情況。針對(duì)這個(gè)問題,本文首先證明了使用俯仰排列的均勻線陣(ULA)抑制地雜波的可行性,然后針對(duì)傳統(tǒng)自適應(yīng)波束形成算法收斂速度慢,對(duì)協(xié)方差矩陣失配弱魯棒的問題,提出了基于協(xié)方差矩陣重構(gòu)的MSCNR算法,通過計(jì)算信號(hào)的MVDR譜重構(gòu)出目標(biāo)協(xié)方差矩陣,最后計(jì)算得到加權(quán)矢量。通過仿真實(shí)驗(yàn)和仿真數(shù)據(jù)處理證明,該方法收斂速度快,計(jì)算所需樣本數(shù)少,能夠在保留氣象信息的同時(shí),有效抑制地雜波。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國(guó)病理生理雜志(2015年8期)2015-12-21 12:38:06