微波光子雷達組網技術
2021-06-03 07:53:22
雷達科學與技術 2021年2期
(南京航空航天大學雷達成像與微波光子技術教育部重點實驗室,江蘇南京 211106)
0 引言
雷達組網,通過對多部雷達進行合理配置和優化部署,增加了系統的自由度,實現了對覆蓋區域的信號截獲、目標探測等能力的大幅提升。傳統的多基地雷達系統,可以通過觀測目標不同散射角度的雷達散射截面積(Radar Cross Section, RCS)起伏特性,獲得一定的空間分集增益,從而突破單基地雷達的探測性能瓶頸,應對電子干擾、超低空突防、反輻射導彈以及隱身武器等“四大威脅”所帶來的挑戰。近年來,隨著多輸入多輸出(Multiple Input Multiple Output, MIMO)雷達以及分布式全相參雷達等新型探測體制的逐漸成熟,雷達組網系統正逐漸成為多基地雷達系統協同探測的高級形式[1-6]。然而,新體制雷達的引入以及數據的融合處理對雷達組網鏈路架構也提出了更高的要求:1)為了保證信號的相參融合處理,系統需要實現更高質量的多波段相參或正交信號產生;2)探測信號帶寬的提升對高容量且穩定的數據傳輸鏈路有了進一步的需求,且為滿足分布式系統節點之間信號的高度一致性,需要精確的同步校準以提升系統的探測性能;3)寬帶雷達信號的多維度接收,包括回波的頻率、相位、極化等信息,需要對傳統的雷達接收機進行性能優化。傳統基于電學的射頻解決方案難以滿足上述需求。
近年來,微波光子學的發展為上述問題提供了新的解決思路和優化方案[7-11]。在信號產生方面,微波光子技術可在本地生成多路多頻段相參微波信號[12-16]與正交信號[17-20]。與傳統電學模擬射頻信號產生方案相比,光生微波技術在頻率靈活性和相噪特性方面有著明顯的優勢。在雷達信號傳輸及分發方面,攜帶有雷達波形的多路相參光信號在中心站生成后,可通過光纖穩相傳輸至各雷達基站。光纖的大帶寬(>1 THz)和低損耗(0.2 dB/km)特性保證了寬帶傳輸鏈路的高效和穩定。在雷達信號接收方面,微波光子寬帶雷達接收機也為回波信號的多域多維(時域、空域、頻域以及幅度、相位、極化等維度)接收處理提供了堅實的技術支撐。通過借鑒同源本振和分集MIMO的思路,國內外專家學者逐漸提出并實驗驗證了多種微波光子雷達組網系統架構的可行性和優越性。
本文將介紹近年來用于雷達組網系統中的微波光子雷達信號產生、傳輸和接收處理等關鍵技術及其工作原理,并回顧微波光子雷達組網的系統架構及其研究進展,同時對未來可能的發展方向進行展望。
1 微波光子雷達組網中的關鍵技術
隨著微波光子技術的快速發展和不斷成熟,微波信號的光學產生、傳輸以及接收處理等方向產出了豐碩的研究成果,為雷達組網系統帶來了新的可能性。下面將分別對雷達組網系統中微波信號光學產生、長距離光纖穩相傳輸、微波光子信號接收處理等關鍵技術及其工作原理進行介紹和分析。
1.1 微波信號光學產生
微波信號光學產生方法是微波光子技術領域的研究重點。借助光子技術的優勢可生成一系列參數優良的微波信號,包括正交化、多頻段的大帶寬微波信號以及低相噪的寬帶捷變頻本振信號等。雷達組網系統對信號的正交性、可復用性要求較高,如何產生滿足這兩種性質的高質量微波信號成為微波光子雷達組網系統需要首先考慮的問題。針對上述情況,目前微波光子雷達組網中微波信號光學產生方案主要分為兩類,分別是多路多波段相參信號產生方案和正交信號產生方案。其中,相參信號產生方案包括基于鎖模激光器的多路信號產生以及基于雙光頻梳的多波段信號產生等,正交信號產生方案包括基于雙輸出光電調制器的相位編碼-線性調頻信號產生以及基于光電振蕩器的混沌信號產生等。
1.1.1 基于鎖模激光器的多路信號產生
鎖模激光器(Mode-Locked Laser, MLL)可被用于產生多路的低相噪微波信號[12],其基本原理如圖1所示。由具有超低時延抖動特性的鎖模激光器輸出一串光頻梳(Optical Frequency Comb, OFC),將其分成兩路,分別用光濾波器選出一根梳齒,其中一根梳齒用于調制雷達基帶信號;另一根梳齒經過移頻操作后,在光電探測器中與前一組選出的梳齒進行拍頻,產生待發射的雷達信號。通過在不同通道選取不同的梳齒便可以產生多路頻率步進可調的微波信號。鎖模激光器的超低時延抖動特性對克服電子高頻采樣極限有著重要意義,同時也可保證所產生信號的超低相噪特性。并且,鎖模激光器的鎖相結構也保證了其產生信號之間的相位同步性。值得注意的是,由于該MLL產生的光頻梳同時也在接收端用作光采樣信號,故其脈沖重復頻率限制了基帶信號的帶寬,從而影響了該雷達系統的成像分辨率。通過采用高脈沖重復率的主動鎖模激光器,該限制將會得到一定的改善[13]。在后續的研究工作中,研究者將該結構生成的多路相參信號通過光纖遠距離傳輸至分布式雷達基站,完成微波光子分布式相參雷達組網的搭建。

圖1 基于MLL的多路信號產生
1.1.2 基于雙光頻梳的多波段信號產生
基于雙光頻梳的可重構多波段線性調頻信號產生方案于2018年被提出并進行了實驗驗證[16],實驗鏈路如圖2所示。同一激光源產生的光載波信號被分為兩路,其中一路產生一組自由光譜范圍(Free Spectral Range, FSR)為fFSR的光頻梳,并在雙平衡光電調制器內用中頻線性調頻(Intermediate Frequency Linearly Frequency Modulated, IF-LFM)信號調制,生成攜帶有調制信號的光頻梳;另一路光載波移頻fs后在電光調制器3中經頻率為fFSR+Δf的微波信號調制(Δf為步進頻率),生成FSR為fFSR+Δf的多頻光學本振作為參考信號。兩路信號經混頻拍頻之后將產生一組具有不同中心頻率的步進頻LFM信號。通過調整兩串OFC之間的頻移,可以靈活地調諧線性調頻信號的中心頻率。需要注意到,當有N條頻梳時,如果滿足如下兩個條件:1)進行電光調制的中頻線性調頻信號的帶寬等于兩個光頻梳FSR的差值;2)光可調延時線(Optical Tunable Delay Line, OTDL)產生的時延等于IF-LFM信號的持續時間。將通過光濾波器的信號在光域里延時拼接后拍頻,將可產生時寬帶寬積(Time-Bandwidth Product, TBWP)達到原中頻線性調頻信號N2倍的微波信號。需要注意到,調節OTDL實現多路光信號時域拼接需要實現光延時的精確匹配。因此,該方案的可復現性受到了一定的限制。

圖2 雙光頻梳生成多波段信號
1.1.3 相位編碼-線性調頻信號產生
現代雷達系統中,線性調頻信號與相位編碼信號是脈沖壓縮雷達常用的信號形式。相較于線性調頻信號,相位編碼信號通過設計編碼序列,可以更為便捷地滿足信號的正交需求。近些年來,一系列光域相位編碼信號生成方案[17-20]相繼被提出。在此基礎上,如何將光域生成的相位編碼信號應用在微波光子雷達,或進一步地應用于微波光子雷達組網中,值得繼續深入探索。這樣的背景下,研究者于2018年提出了多路正交的相位編碼-線性調頻(Phase Coded Linear Frequency Modulated, PC-LFM)信號的光學產生方案并將其應用于分布式相參孔徑雷達[21]。在該雷達系統中,其信號產生鏈路主要的相位編碼模塊如圖3所示。

圖3 相位編碼-線性調頻信號光學生成
假設調制有線性調頻信號的光載波信號Ein(t),其表達式為
Ein(t)=E0ej2πfct·

(1)
式中,E0和fc分別為光載波的幅度和頻率,m為光電器件調制系數,f0和k分別為線性調頻信號的初始頻率和調頻斜率。將該信號加入相位編碼模塊,當加載的相位編碼序列V(t)=V0φ(t)時,雙輸出光電調制器(Dual-Output Mach-Zehnder Modulator, DO-MZM)的輸出為
(2)
式中,V0為相位編碼信號的幅度,φ(t)為二相編碼的相位,即“+1”或“-1”,Vπ和Vb分別為調制器的半波電壓和偏置電壓。將此兩路光信號通過平衡光電探測器(Balanced Photodetector, BPD)后,輸出的射頻信號可表示為
I(t)∝|E1(t)|2-|E2(t)|2=
(3)
當DO-MZM的偏置電壓設置為半波電壓的一半,即調制器偏置在正交點時,即可得到如式(4)所表示的脈內相位編碼-脈間線性調頻信號波形:
(4)
當多波段相參線性調頻信號分為多路并各自接入相位編碼模塊,通過編碼序列的精確設計,即可生成正交的二相編碼-線性調頻雷達信號并應用于分布式相參雷達系統。
1.1.4 基于光電振蕩器的混沌信號產生
光電振蕩器(Opto-Electronic Oscillator, OEO)一般用于超低相噪的微波本振信號產生[22],但當其工作于混沌狀態時,也可以產生具有良好正交性的低相噪信號[23]。常見的OEO鏈路由激光器、馬赫-曾德爾電光調制器、單模光纖、電帶通濾波器以及電放大器等組成,如圖4所示。在MZM后接入光分束器使得部分光信號作為光電振蕩反饋信號進入振蕩環路,當反饋增益足夠大時,該光電振蕩器將陷入混沌振蕩狀態,產生混沌信號。由于混沌信號的類隨機特性以及對初始值的敏感特性,當其從不同的初始狀態振蕩時,不同的振蕩鏈路便可產生相互正交的混沌信號。基于光電振蕩器產生的混沌信號有著較大的帶寬,被用在分布式系統定位時可保證延時估計的準確性,提高定位系統的精度。在文獻[23]給出的實驗結果中,其最大定位誤差小于6.5 cm。

圖4 混沌OEO鏈路圖
1.2 微波信號光纖穩相傳輸
雷達組網系統中,各個基站間需要實現信號的時間同步、相位同步等。在微波光子雷達組網中,微波信號通過長距離光纖傳輸后,除了需要考慮本振噪聲對多基地雷達的影響外[24-28],光纖受環境影響產生的延時抖動也會對信號的相位穩定造成顯著的惡化。為此,人們在上世紀80年代提出了基于光纖的射頻信號穩相傳輸技術[29]。近年來隨著微波光子技術逐漸走向應用,結合光子技術實現長距離穩相傳輸重新成為研究熱點[30-34]。此節將介紹并分析基于混頻器以及基于微波光子鎖相環的微波信號穩相傳輸技術。
1.2.1 基于混頻器的微波信號光纖穩相傳輸
基于混頻器的穩相傳輸方案屬于被動式的穩相,大致可分為后補償與預失真兩種。其中,后補償式方案的原理為:在接收端引入一個輔助信號,其頻率為待傳輸微波本振信號頻率的一半。讓該輔助信號在傳輸光纖中往返傳輸兩次,得到的延時為本振信號在光纖中從發送端單向傳輸至接收端延時的兩倍。由此,參考信號經傳輸造成的相位抖動與本振信號傳輸后的相位抖動相同,在接收端通過混頻使兩者相互抵消,從而得到光纖傳輸后的穩相射頻信號[31]。然而,此穩相傳輸方案需要提供另一個低相噪輔助信號,在實際場景中,其可行性與成本問題對其應用范圍產生了一定限制。
針對后補償式穩相傳輸的不足之處,研究者提出了改進的預失真式穩相傳輸方案[32],如圖5所示。在發送端利用分頻器生成傳輸信號一半頻率的輔助信號,將其分為兩路,一路先與待傳輸信號混頻并取上變頻項;另一路送入傳輸鏈路來回傳輸兩次,得到與傳輸線路延時對應的相位共軛項。將攜帶有相位共軛項的微波信號與前面得到的上變頻信號進行混頻并取下變頻項,使得待傳輸的微波信號頻率保持不變,但附加了相位預補償信息,實現微波信號的穩相傳輸。

圖5 預失真式穩相傳輸
基于混頻器的微波信號光纖穩相傳輸技術簡單易行,但在信號的混頻過程中會多次疊加信號噪聲,對信號相位的短期穩定性造成一定程度的惡化。
1.2.2 基于鎖相環的微波信號光纖穩相傳輸
與被動式穩相傳輸鏈路相比,鎖相環穩相傳輸可以在不影響相位短時穩定性的前提下提高鏈路的長時穩定性。結合微波光子移相器和光可調延時線,研究者提出了雙鎖相環微波信號光纖穩相傳輸方案[30],其鏈路如圖6所示。該鏈路包含了微波光子移相器和電可調光延時線兩個相位調節器,其中,微波光子移相器可在360°范圍內移相,但是由于需要調節偏振控制器,其調節精度和速度受限;電可調光延時線雖然調節精度高反應速度快,但對于頻率為數GHz的微波信號來說,其調節范圍太小,可能會造成鎖相環失鎖等問題。雙鎖相環方案結合了兩者的優勢,通過搭建并行的快慢雙鎖相環,可以做到同時兼顧快速小幅的相位抖動和緩慢大范圍的相位變化。待傳輸微波源信號通過偏振調制器(Polarization Modulator, PolM)加載到光載波上,經過微波光子移相器后進入光纖穩相鏈路。在接收端處,光信號被光耦合器分為兩部分:一部分通過光電探測器得到穩相的微波信號;另一部分經光反射鏡原路返回至發射端,經過光環形器進入鎖相環。返回的光信號通過光電探測器拍頻得到微波信號,將其與待傳輸信號鑒相,得到光纖鏈路引入的相位差信號,通過該相位差信號反饋控制可調光延時線或者微波光子移相器,完成雙鎖相環的構建。為保證鎖相環的長期穩定工作,該方案添加了比例積分微分電路來適當處理相位差信號。當鎖相環鏈路穩定后,得到相位預補償的傳輸光信號經過光傳輸鏈路后經光電探測器拍頻,得到的微波信號可以保證相位的穩定。

圖6 雙鎖相環微波信號光纖穩相傳輸
1.3 微波光子信號接收處理
雷達組網提出的目標之一便是為了多域多維地全方位探測目標區域內的有用信息,因此對雷達接收機提出了更高要求。研究者結合光子優勢,針對目標探測所需的相位、極化等回波信息,公開發表了一系列微波光子寬帶雷達接收機的研究成果,實現了對目標頻率、相位、極化等所需信息的探測。微波光子雷達信號接收處理的研究成果拓寬了微波光子雷達接收機的研究領域和適用場合,同時也為微波光子雷達組網系統提供了更為堅實的研究基礎和更多可能的發展方向。
1.3.1 去斜接收
微波光子雷達的去斜接收可理解為在光域里實現雷達信號的下變頻和去啁啾處理,得到攜帶目標回波信息的低頻信號。此處以載波抑制雙邊帶調制去斜接收四倍頻信號為例,光譜圖如圖7所示。參考信號的光譜為載波抑制的±2階邊帶(圖7(a)),當接收到四倍頻回波信號后,-2階的參考信號邊帶調制到+2階或-6階,+2階的參考信號邊帶調制到-2階或+6階,且雷達發射信號在自由空間中傳播后會產生攜帶位置信息的頻移(圖7(b)),通過光帶通濾波器選出+2階或者-2階光邊帶后(圖7(c))送入光電探測器拍頻,該頻移差值即可被轉換為電信號(圖7(d))。拍頻得到的電信號通常僅為兆赫茲量級,對A/D轉換的采樣率要求隨之降低。在此基礎上,后續的數字域中需要處理的數據量也大大減少,采用相對應的算法對回波數據進行二維成像,即可完成實時高分辨率逆合成孔徑雷達(Inverse Synthetic Aperture Radar, ISAR)成像系統的搭建[8]。值得注意的是,單通道的光子混頻去斜存在著鏡頻干擾的影響,混淆目標相對參考點的位置判斷;進一步地,在ISAR成像中,鏡頻帶來的對稱點目標也會影響到成像效果。

圖7 去斜接收過程光譜圖及時頻圖
1.3.2 同向/正交(I/Q)解調接收
利用光子90°混波器與光電平衡探測可實現在光域中對微波信號的同向/正交(I/Q)解調接收。該方案的提出解決了光子混頻去斜接收中存在的由鏡頻干擾導致的距離向模糊問題。以兩倍頻的I/Q解調雷達收發機為例[35],裝置框圖如圖8所示。將電光調制器的偏置電壓調制到最大傳輸點,生成帶有光載波與正負二階邊帶的光信號。將其分成兩路,一路作為參考信號傳至接收機,另一路拍頻后選取二倍頻微波信號發射到自由空間中。參考信號在進入90°光混波器之前先通過光帶通濾波器,選取 +2階或-2階的光邊帶作為去斜參考信號;接收到的二倍頻回波信號通過另一個電光調制器調至正負一階邊帶信號。值得注意的是,此處由回波信號調制產生的一階邊帶,其調頻斜率與參考信號的二階邊帶相同,因此可以完成后續的去斜接收。接著,這里給出90°光混波器的輸出矩陣:

圖8 微波光子I/Q解調接收

(5)
式中,eref(t)和eecho(t)分別為參考光信號和回波調制光信號。將光混波器的4個輸出信號分別接入兩個光電平衡探測器,即可實現對雷達回波信號的I/Q解調接收。與單通道光子去斜的方案相比,此方案通過平衡檢測解決了鏡頻干擾,同時提高了去斜信號頻率分量的功率,優化了探測效果。然而,該結構需要兩路光纖傳輸參考信號實現去斜,當應用于微波光子分布式雷達系統中時,會使得光纖傳輸網絡復雜化;且當傳輸距離較遠或者兩路器件不匹配時,兩路延時的校準也相對困難。因此,該系統方案需要實現對傳輸參考信號的鏈路進行簡化。
1.3.3 極化接收
微波光子全極化雷達接收機研究成果的公開發表[36]證明了利用微波光子技術測量雷達目標極化散射矩陣的可行性。如圖9所示,在發射機中,在雙偏振-雙平行馬赫-曾德爾調制器(Dual-Polarization Dual-Parallel Mach-Zehnder Modulator, DPol-DPMZM)的一個偏振態上將任意波形發生器(Arbitrary Waveform Generator, AWG)產生的LFM信號調制到光載波上,并在另一個偏振態上調制出正負一階邊帶。通過偏振分束器將DPol-DPMZM輸出信號分為兩路,一路送入發射機,通過光帶通濾波器后拍頻出兩路相反調頻斜率的寬帶線性調頻信號發射出去;另一路則作為兩個極化方向的激勵參考信號送入接收機。在接收機中,用兩根天線接收回波信號,并將其送入雙偏振電光調制器。通過該電光調制器將接收到的回波信號分別調制到參考光載波信號的兩個偏振態上,最后配合偏振分束器,利用光域的偏振分束完成對微波信號極化的區分,通過光電探測器拍頻,完成對4個極化微波信號分量的接收。
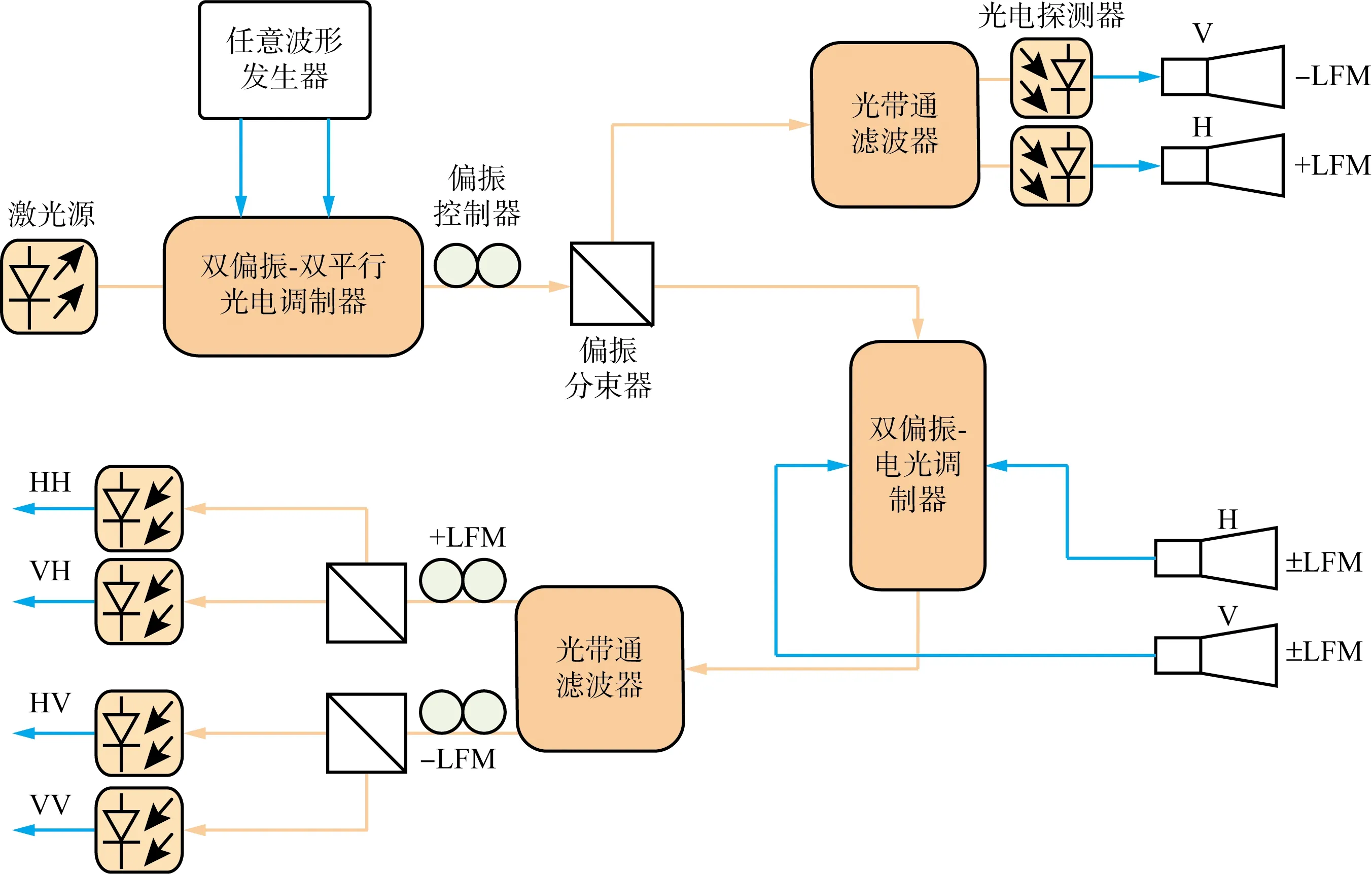
圖9 微波光子全極化雷達接收機
2 微波光子雷達組網架構研究進展
隨著微波光子雷達中關鍵技術的演進與迭代,微波光子雷達組網的發展主要經歷了以下幾個階段:
1)基于光載無線電(Radio over Fiber, RoF)技術的多基地遠端探測[37-39]。此階段暫未提出微波光子雷達概念,基站系統仍為電微波器件組成。由于同軸電纜的笨重、昂貴,研究者在信號傳輸過程中使用了更為輕便且抗電磁干擾的光纖鏈路。并且,光纖的大帶寬、低傳輸損耗特性還可以減少微波毫米波信號在自由空間中的衰減。RoF技術的運用擴大了原有多基站雷達的分布范圍。
2)微波光子分布式雷達組網[23,40-46]。此階段可以認為是微波光子雷達組網概念的萌芽,從信號產生、傳輸到接收都采用光子器件,光學方法產生的大帶寬信號提升了系統定位的精度;同時,雙/多基地雷達的收發分置特性也通過光纖鏈路被巧妙地應用到了此類系統之中。研究者利用到達時間(Time of Arrival,TOA)定位原理做了多基地聯合定位,驗證了基于微波光子技術的多基地雷達系統在探測精度、基站同步等方面的優越性。
3)微波光子MIMO雷達[47-48]。作為雷達組網里不可缺少的系統架構,微波光子MIMO雷達的提出豐富了微波光子雷達組網的框架,為組網內基站節點的信號收發架構和復用形式提供了新的思路和研究領域,并且到達角(Direction of Arrival, DOA)估計和MIMO目標定位的實驗也驗證了微波光子MIMO雷達在角度分辨率和估計誤差等方面的優勢。
4)微波光子分布式相參雷達組網[21,49-51]。分布式相參雷達系統采用多個分布式可移動的、天線孔徑相對較小的雷達,通過先進信號處理技術提升系統探測性能,自提出以來便逐漸成為雷達領域的研究熱點。微波光子學由于其在相參信號產生、分布式光纖網絡等研究領域深厚的技術積淀,被認為是開發分布式相參雷達組網的重要技術之一。
2.1 基于RoF技術的多基地遠端探測
RoF傳輸是微波光子學的重要研究方向之一。在基于RoF傳輸的多基地遠端探測系統中,微波信號的產生和處理可以在中心站完成,通過光纖鏈路將微波信號傳輸至遠端的探測基站。探測基站將中心站傳輸來的信號進行光電轉換并發射出去,再將接收到的回波信號調制到光載波上通過光纖鏈路傳輸回中心站。日本監察通訊部電子導航研究所用此技術在機場外來物(Foreign Object Debris, FOD)探測領域進行了一系列的研究[38-39]。通過長距離傳輸光纖,本地信號產生系統與遠端的毫米波探測模塊相連接,構成全新的FOD檢測系統,擴大了原94 GHz雷達系統的探測范圍。同時,研究者們也對該系統的RoF鏈路穩定性和FOD檢測性能進行了一定的分析與研究,證實了將光纖傳輸網絡應用于多傳感器探測系統的可行性。
2.2 微波光子分布式雷達組網
隨著光生微波技術的成熟,波分復用技術以及光纖傳輸的大帶寬優勢被逐步應用在雷達組網中。2015年,南京航空航天大學潘時龍課題組提出了基于波分復用技術的分布式混沌雷達[23],其框架如圖10所示。多個雷達基站通過OEO產生正交的混沌信號,由天線發射至自由空間后,由位于空間另一處的天線接收散射信號并在接收站調制到光載波上。發射站的光參考信號與接收站的回波調制光載波信號通過波分復用光纖網絡傳輸至中心基站,在中心站內完成后續的數據融合處理。由于光纖長度的確定,時間同步過程隨之簡化;同時,波分復用技術進一步完善了中心站的信號接收處理過程,有力地推動了微波光子學在分布式多基地雷達系統中的創新與應用。
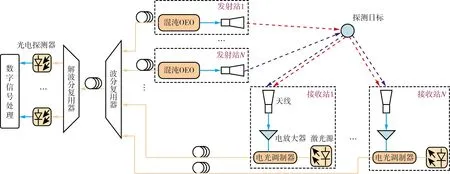
圖10 微波光子分布式混沌雷達
2018年,該課題組又提出了基于波分復用技術的光纖分布式超寬帶雷達組網并進行了實驗驗證[43]。該雷達組網系統與上述微波光子分布式混沌雷達都是通過波分復用技術實現的分布式多基地雷達系統,區別在于此分布式超寬帶雷達組網采用光生超寬帶脈沖信號作為探測信號。在信號產生端,高斯脈沖序列對光載波陣列進行相位調制,隨后調相光載波通過解波分復用器分離并由單模光纖傳輸至遠程雷達基站。各雷達基站收發超寬帶脈沖信號,并將回波信號傳輸回中心基站進行信號處理,從而獲取目標定位信息。在二維定位實驗中,通過兩個分布式的收發站,該系統實現了一厘米的定位精度。
上述微波光子雷達組網架構中,信號是由多個發射站獨立產生并由各個接收站分別接收的,這樣的非相參架構在進行信號處理時相對快捷,且由于各基站間的光纖長度相對固定,完成各基站間的時間同步只需補償光纖傳輸鏈路帶來的延時。
2.3 微波光子集中式MIMO雷達
2018年,南京航空航天大學潘時龍課題組提出了基于波分復用和頻率分集的微波光子集中式MIMO雷達[47],其結構如圖11所示。該結構在發射端通過光子倍頻技術實現大帶寬的頻率分集線性調頻信號生成,在接收端結合了波分復用技術和光子去斜技術完成對頻率分集LFM信號的接收處理。當N個接收天線接收M個不同頻段的回波信號后,在電光調制器中將這些回波信號調制到攜帶有不同頻段LFM信號的光載波參考信號上,在接收器中將不同波長的光載波信號分離開并分別拍頻,實現對每一路M個回波信號的區分,從而完成M*N個線性調頻信號的光域去斜接收。基于光子技術的寬帶信號生成以及去斜接收使得該MIMO雷達系統可以突破現有電子設備的帶寬限制。在驗證實驗中,該系統對兩個反射目標的到達角估計誤差分別為0.08°和0.19°,達到較高的角度分辨率。

圖11 微波光子集中式MIMO雷達
文獻[47]通過分析光電探測器中正確區分頻率分集LFM信號應該滿足的頻率條件,解釋了在光域里如何實現多波段回波信號去斜接收的過程,為今后的微波光子MIMO雷達架構提供了一定的理論支撐,同時也進一步充實了微波光子雷達組網系統的框架。
2.4 微波光子分布式相參雷達組網
2018年,基于微波光子技術的寬帶分布式相參孔徑雷達(Distributed Coherent Aperture Radar, DCAR)系統被清華大學鄭小平課題組提出并被實驗驗證[21]。該雷達網絡系統由中心處理控制系統,空間上分散的雷達收發機以及時間同步網絡組成,如圖12所示。中央控制系統完成信號產生和處理工作,通過多通道光任意波形發生器生成光載的正交且相干的相位編碼-線性調頻信號并傳輸至遠端的收發機;由光可調延時線組成的時間同步網絡完成不同遠程收發機的同步;雷達收發機則僅執行光學/射頻和射頻/光學轉換和信號收發功能。當該系統工作在接收相參模式時,每部雷達接收不同雷達基站發射波形的回波,通過與自身發射的波形作匹配濾波,計算相參參數和各基站到目標的距離。當系統工作在全相參模式時,各雷達根據相參參數調整發射波形的時間和相位,使得發射出的信號在目標處相參疊加,完成發射相參;其后通過數字信號處理,將每部雷達匹配濾波后的結果進行相參處理,實現收發全相參。在驗證實驗中,當一個X波段,帶寬為3 GHz的兩單元微波光子DCAR系統工作在全相參模式時,單個雷達的信噪比(SNR)增益達到8.3 dB。

圖12 微波光子分布式相參孔徑雷達
該系統通過利用光子技術在產生大帶寬信號、搭建分布式光纖網絡等領域的積累與優勢,簡化了遠端雷達單元,降低了分布式系統的傳輸損耗,使得DCAR系統的性能得到了進一步的提升。在后續的工作中,該課題組改進了接收相參過程,提出了基于光子技術的寬帶雷達相參接收結構,并對目標進行了ISAR成像實驗[51],完善了分布式相參孔徑雷達系統。
2019年,意大利Bogoni課題組提出了基于光子學的相參MIMO雷達組網架構[49-50]。該微波光子分布式MIMO雷達的實驗驗證系統由一個光學主時鐘、本地協作處理系統和遠程雷達基站組成,如圖13所示。其中,光學主時鐘由一個可視為多頻光本振的鎖模激光器構成,其脈沖重復頻率為fPRF。雷達中頻信號在電/光轉換模塊中被調制到MLL的多個頻梳上,通過長距離光纖傳輸至遠端雷達基站,并在雷達基站完成光電轉換后發射到自由空間。由于不同雷達基站至目標的距離不同,為了實現發射相參,需要在光線傳輸線后添加光可調延時線控制發射信號的相關參數。同時,MLL產生的頻梳分出一路作為參考光信號,通過光纖傳輸至雷達基站。天線接收到回波信號經過放大濾波后,將其調制到參考光信號上,由光纖傳輸回中心站,完成光電轉換,得到回波信號中的探測信息。光纖同步網絡的存在保證了多路寬帶信號的收發相參性。

圖13 微波光子分布式相參MIMO雷達
在戶外實驗中,該分布式相參雷達系統由MLL生成兩路相參的X波段雷達信號,帶寬為100 MHz。通過調節光可調延時線完成兩路雷達基站的相參發射,并且在數字域經過相干MIMO處理后,檢測精度提升了20倍,實現了精度為10 cm的合作目標探測。相較于室內實驗條件,該外場實驗是在存在雜波和干擾信號以及有著RCS波動和多徑衰落等因素影響的真實環境下進行的,有效地驗證了相參雷達信號光學產生方法的穩定性,以及光纖鏈接的相參MIMO雷達在工程應用中的可行性。
上述兩種架構的提出驗證了基于光子學發展分布式相干雷達網絡的可行性:高度穩定的光子時鐘以及光纖傳輸的穩定時延可以簡化并實現分布式雷達節點的同步;同時,光纖大帶寬傳輸特性使得分布式雷達各站點的信號可以集中產生,保證信號之間的相參性。微波光子分布式相參雷達組網結合了分布式相參雷達和微波光子技術兩者的優勢,有望成為未來相干雷達網絡發展的重要方向。
3 總結與展望
雷達組網作為現代雷達系統的重要發展方向之一,在戰略預警、防空反隱、數據級探測信息融合等領域發揮著日趨重要的作用。解決雷達組網系統的關鍵技術難題是完成區域探測并進一步地實現多維度信息融合的基礎與前提。在此背景下,微波光子技術的研究者們巧妙地將光子學的優勢應用于雷達組網架構,開拓了微波光子雷達組網新方向,為微波光子技術和雷達組網系統提供了越來越多的可能性,同時也將面臨更多挑戰:
1)對于微波光子雷達組網(以下簡稱組網)內各基站的信號產生與接收預處理,如何利用光子技術的優勢,產生滿足協同探測需求的微波信號,并在光域里實現對回波信號中攜帶著的多維信息的接收預處理,需要進一步的探索。同時,對于組網內各基站之間同步性能的量化分析,除了需要考慮系統的拓撲結構對網絡節點接收信息的實時性帶來的影響,環境因素對光纖傳輸網絡帶來的畸變、散射效應所造成的傳輸誤差,同樣值得研究者更為深入的研究。
2)對于組網系統而言,當多個微波光子功能模塊級聯時,其鏈路信噪比將會受到多級電光/光電轉換(包括調制器消光比、探測器響應度等)、長距離光纖傳輸帶來的色散衰減以及摻鉺光纖放大器引入的放大器自發輻射(Amplifier Spontaneous Emission, ASE)噪聲等諸多因素的干擾,致使整個系統的性能惡化。如何將多基站內各個單元模塊進行高效整合,提高系統整體的穩定性,成為微波光子雷達組網系統需要面臨的重大挑戰之一。
3)對于組網協同探測算法的研究,需要考慮到微波光子產生信號的特性以及光纖傳輸網絡的系統同步性能。例如,當利用微波光子雷達進行ISAR成像時,其回波信號的大帶寬和較小波長的特性使得目標轉動分量引起的二次項距離徙動和相位誤差不可忽略,需要更高精度的補償方法[52-53];在進行組網雷達多目標跟蹤時,多個分布式基站的數據頻繁到來,且由于光纖的寬帶數據傳輸能力,數據傳輸次數與單次傳輸的數據量相結合,使得中心處理基站接收到的數據存在著量級的提升,其計算資源面臨嚴峻的挑戰。因此,若要充分發揮出微波光子雷達組網的性能,對應數據處理的算法理論不可或缺。
4 結束語
本文對基于微波光子技術的多基地雷達組網系統進行了回顧、總結與展望。由于可以在光域中精細地產生、傳輸以及處理大帶寬微波信號,微波光子技術逐漸受到國內外專家學者們的廣泛關注,有著廣闊的研究及應用前景。在此技術基礎上發展的微波光子分布式多基地雷達網絡,在系統作用范圍、定位精度以及成像二維分辨率等參數指標上可獲得較大的優勢,有著一定的發展潛力。本文詳細介紹了現有的可用于微波光子分布式雷達系統中的微波信號生成技術、穩相傳輸方式以及多種回波信號去斜接收機結構,并對這些方法的優缺點進行了一定的分析與總結。同時,本文綜合并歸納了已被提出的各微波光子分布式雷達組網結構,對該類微波光子鏈路系統可能的技術手段及未來發展方向作出了一定的展望,對今后的拓展研究起到一定的參考作用。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25