火炮后坐運(yùn)動(dòng)加速度自感知裝置設(shè)計(jì)
2021-06-02 02:23:54鄧澤洲王茂森戴勁松沈少寶
兵器裝備工程學(xué)報(bào) 2021年5期
鄧澤洲,王茂森,戴勁松,沈少寶
(南京理工大學(xué) 機(jī)械工程學(xué)院, 南京 210094)
近年來(lái),武器“無(wú)人化”和“智能化”的發(fā)展需求不斷提高。在裝備無(wú)人化發(fā)展的過(guò)程中,如何適應(yīng)信息技術(shù)、智能技術(shù)、控制技術(shù)的發(fā)展,并設(shè)計(jì)集攻擊與防護(hù)能力于一身的“無(wú)人化兵器”,是部隊(duì)發(fā)展的迫切需求以及奪取未來(lái)戰(zhàn)爭(zhēng)優(yōu)勢(shì)的必然要求。在無(wú)人機(jī),巡航導(dǎo)彈,戰(zhàn)斗機(jī)以及制導(dǎo)炸彈等近空突防武器的發(fā)展過(guò)程中,其雷達(dá)探測(cè)的等效面積越來(lái)越小,紅外特征顯著降低,而高射速火炮、便攜式導(dǎo)彈以及彈炮一體防空系統(tǒng)等的近程防空武器,就成為了防空作戰(zhàn)體系中的最后一道屏障。其中,中、小口徑高射速火炮由于突出的防空能力,被廣泛的運(yùn)用到各種軍事武器作戰(zhàn)平臺(tái)上[1-2]。
在中、小口徑火炮無(wú)人化發(fā)展的中,有關(guān)火炮自感知方面的研究較為缺乏。針對(duì)火炮自感知的研究過(guò)程,本文設(shè)計(jì)一個(gè)基于慣性器件的嵌入式運(yùn)動(dòng)感知監(jiān)控測(cè)量裝置,通過(guò)測(cè)量火炮發(fā)射過(guò)程中炮管后坐的加速度,來(lái)判斷發(fā)射的炮彈種類(lèi)、數(shù)量,以及判斷發(fā)射過(guò)程中是否出現(xiàn)問(wèn)題,同時(shí),該裝置可成為火炮標(biāo)配的一部分,能夠完成火炮全壽命的檢測(cè),并為以后的研究、改進(jìn)提供依據(jù)。
1 自感知采集存儲(chǔ)系統(tǒng)設(shè)計(jì)
由于小口徑火炮的可安裝附加裝置的空間較小,為滿足多種小口徑火炮的安裝需求,需盡量減小該自感知裝置的設(shè)計(jì)尺寸。為了實(shí)現(xiàn)上述目標(biāo),本研究將MEMS慣性傳感器[3-6]、采集存儲(chǔ)模塊、電源和輸入輸出接口等集成到設(shè)計(jì)的殼體中。同時(shí),為了滿足火炮的高頻率、高沖擊的要求,在殼體中填入環(huán)氧樹(shù)脂,對(duì)電路板和傳感器進(jìn)行灌封加固,使其滿足火炮系統(tǒng)的振動(dòng)和沖擊要求[7]。
1.1 系統(tǒng)總體方案設(shè)計(jì)
本運(yùn)動(dòng)狀態(tài)自感知裝置,主要安裝在小口徑火炮的運(yùn)動(dòng)部件上,完成相關(guān)運(yùn)動(dòng)參數(shù)的采集,這里主要是加速度采集。采集完畢后使用專(zhuān)用的數(shù)據(jù)通訊接口讀取采集的運(yùn)動(dòng)參數(shù)數(shù)據(jù),然后使用上位機(jī)軟件分析采集到的運(yùn)動(dòng)參數(shù)數(shù)據(jù),來(lái)判斷火炮發(fā)射過(guò)程中,發(fā)射的炮彈的數(shù)量和種類(lèi),并通過(guò)圖像分析火炮發(fā)射過(guò)程中的各個(gè)階段,區(qū)分準(zhǔn)備狀態(tài)、射擊狀態(tài)和結(jié)束狀態(tài)等,進(jìn)而判斷火炮在射擊過(guò)程中是否出現(xiàn)了肉眼無(wú)法分辨的故障。
本運(yùn)動(dòng)狀態(tài)自感知裝置主要通過(guò)火炮射擊過(guò)程中身管軸線方向的加速度大小和波形來(lái)判斷炮彈的種類(lèi)和數(shù)量。當(dāng)火炮發(fā)射過(guò)程中出現(xiàn)故障時(shí)會(huì)出現(xiàn)明顯的抖動(dòng),身管軸向相互垂直的兩個(gè)方向的加速度信號(hào)的采集可以輔助判斷火炮發(fā)生故障,正常發(fā)射情況下這2個(gè)坐標(biāo)軸的加速度變化不明顯。
圖1為使用仿真軟件得到的小口徑火炮的Z軸加速度曲線,通過(guò)分析,可以判斷出火炮發(fā)射各個(gè)階段,由于某型小口徑火炮發(fā)射不同類(lèi)型炮彈會(huì)產(chǎn)生明顯的加速度幅值和波形的變化,這里通過(guò)分析加速度的波形和幅值來(lái)判斷判斷炮彈種類(lèi),同時(shí)可以通過(guò)分析波形的數(shù)量來(lái)判斷發(fā)射數(shù)量[8-9]。
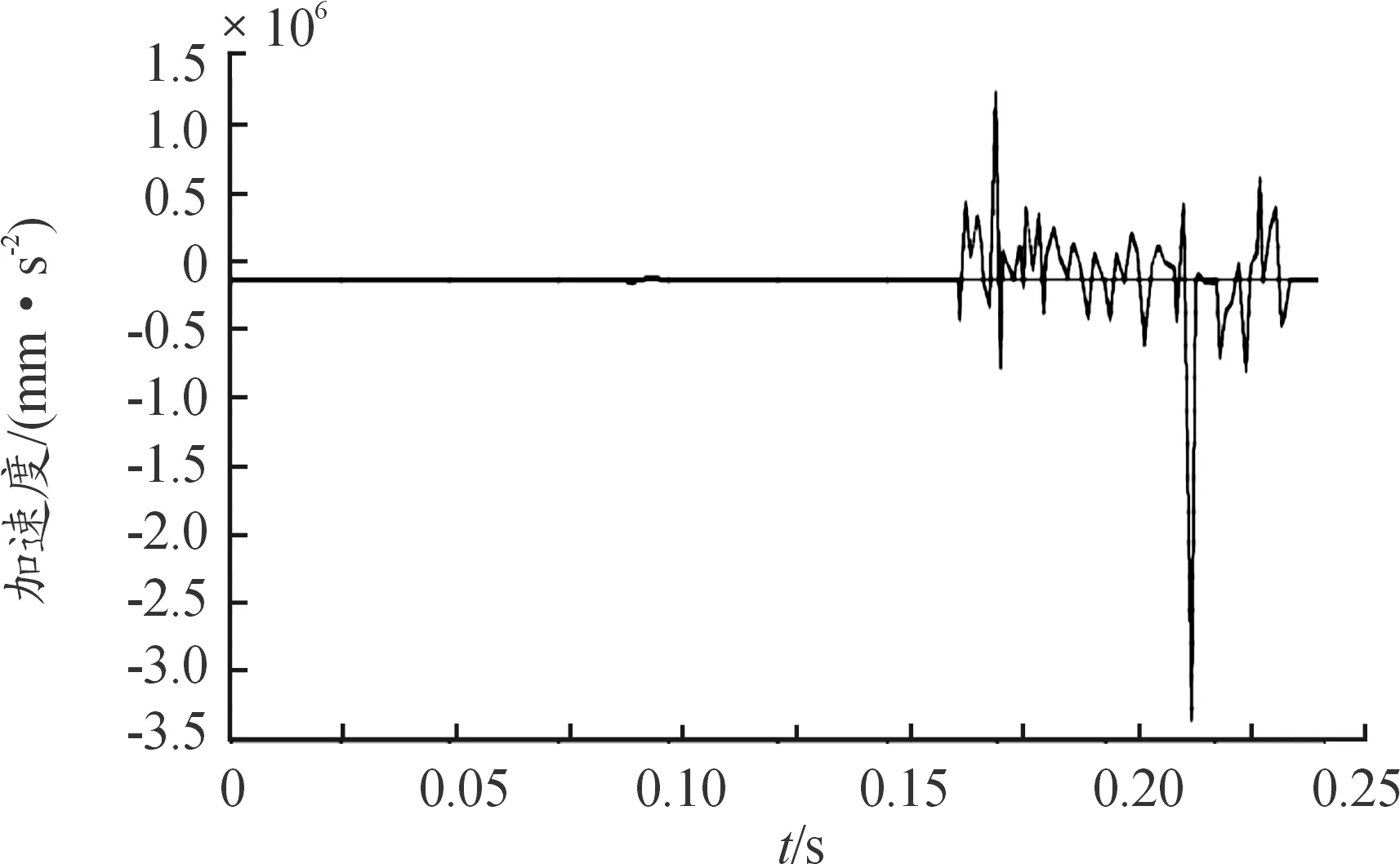
圖1 Z軸加速度曲線
通過(guò)不斷獲取的實(shí)驗(yàn)數(shù)據(jù),建立某型火炮不同彈藥發(fā)射的數(shù)據(jù)庫(kù),并通過(guò)長(zhǎng)期實(shí)驗(yàn)不斷完成數(shù)據(jù)庫(kù),最后可以通過(guò)上位機(jī)分析采集到的數(shù)據(jù)可以自感知發(fā)射炮彈的數(shù)量和種類(lèi)。
本運(yùn)動(dòng)狀態(tài)自感知裝置外形尺寸為40 mm×50 mm×80 mm,實(shí)物圖如圖2,該裝置由MEMS傳感器、信號(hào)調(diào)理電路、AD轉(zhuǎn)換電路、FPGA、NAND FLASH存儲(chǔ)電路、電源、通訊接口、高強(qiáng)度鋁合金外殼組成[10-15],圖3所示為其外形,有關(guān)原理框圖如圖4。
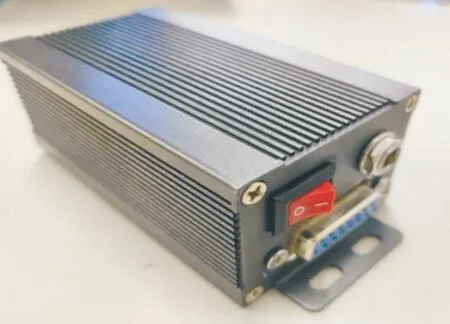
圖2 運(yùn)動(dòng)狀態(tài)自感知裝置實(shí)物圖

圖3 運(yùn)動(dòng)狀態(tài)自感知裝置結(jié)構(gòu)示意圖

圖4 運(yùn)動(dòng)狀態(tài)自感知裝置原理框圖
1.2 硬件設(shè)計(jì)
1.2.1 慣性器件選型與信號(hào)調(diào)理電路設(shè)計(jì)
通過(guò)使用仿真軟件對(duì)小口徑火炮的運(yùn)動(dòng)學(xué)仿真,仿真結(jié)果如圖1所示。該型火炮的后坐最大加速度為150g左右,其余均在50g范圍內(nèi)。彈體與機(jī)械結(jié)構(gòu)發(fā)生碰撞的時(shí)候會(huì)產(chǎn)生高頻加速度信號(hào),幅度最大時(shí)在150g左右[16]。綜合分析運(yùn)動(dòng)學(xué)分析的結(jié)果、傳感器成本、傳感器的測(cè)量精度等,并結(jié)合試驗(yàn)要求,對(duì)加速度計(jì)選型,部分性能參數(shù)值如表1所示。

表1 加速度計(jì)部分性能參數(shù)
該型號(hào)加速度計(jì)依據(jù)有關(guān)數(shù)據(jù)手冊(cè)推薦,選擇二階RC低通濾波器來(lái)限制該款加速度計(jì)的帶寬以滿足測(cè)量0~10 kHz的振動(dòng)的要求,其外圍電路圖如圖5所示。
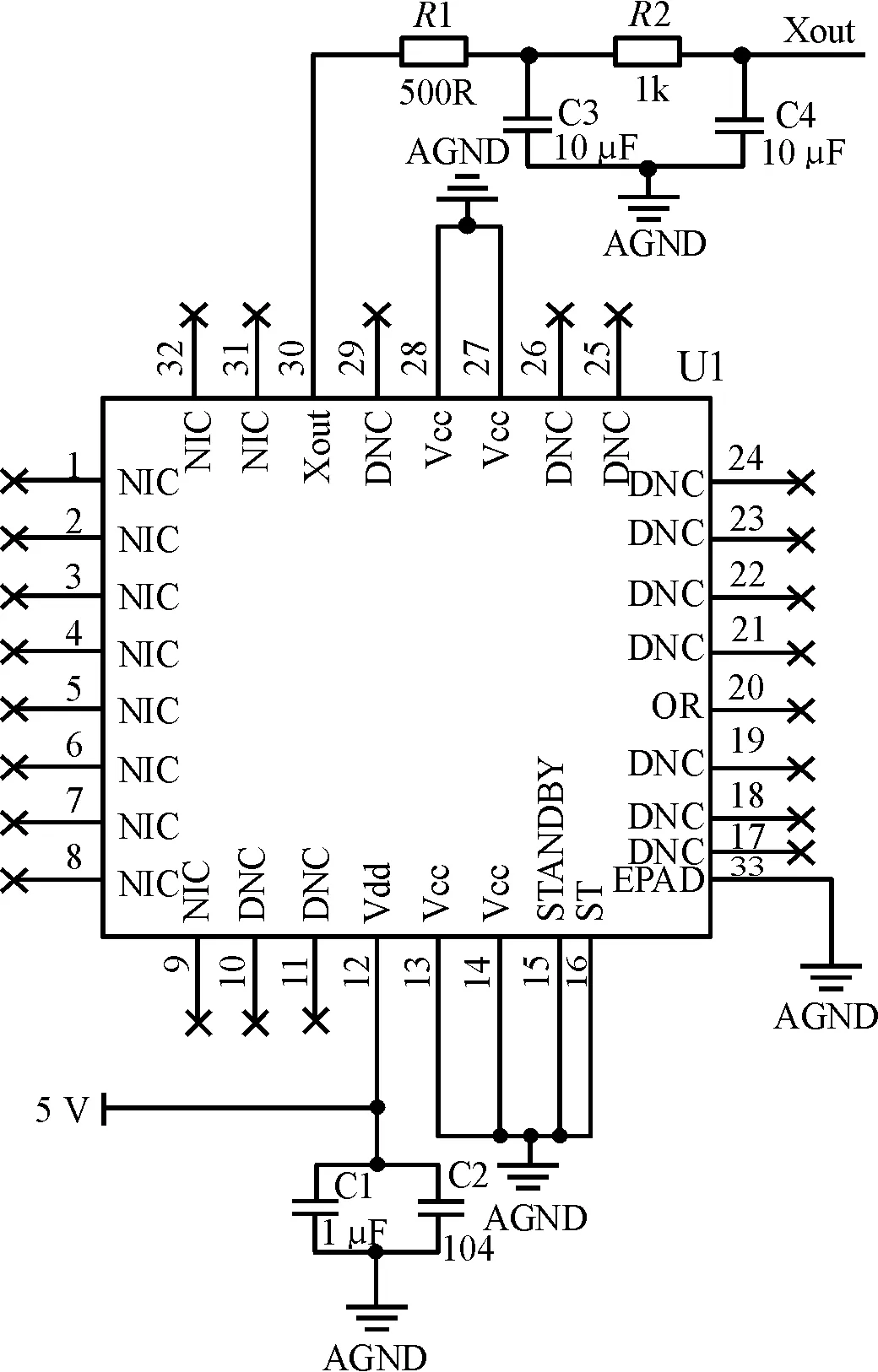
圖5 加速度計(jì)外圍電路圖
1.2.2 數(shù)據(jù)采集與存儲(chǔ)
根據(jù)采樣定理,為了避免信號(hào)失真,采樣頻率fs必須要大于等于被測(cè)信號(hào)頻率fm的2倍,一般取fs=(8~10)fm。根據(jù)傳感器經(jīng)過(guò)低通濾波后的信號(hào)最高頻率為10 kHz,所以選取100 ksps的ADC采樣速率可以滿足要求。綜合體積、功耗、成本等考慮,選擇了某公司的16 bits、單通道、基準(zhǔn)電壓為5 V的ADC芯片。
本系統(tǒng)為記錄火炮發(fā)射過(guò)程參數(shù),考慮到小口徑火炮單次極限發(fā)射時(shí)間在10 s以下。本文采用的采樣頻率為10 kHz,4通道16 bit AD并行采樣60 s,產(chǎn)生的數(shù)據(jù)量為:
10 kHz×16 bit×4×60=38.4 Mbit
考慮到存儲(chǔ)數(shù)位、價(jià)格、體積等因素,并為后續(xù)研究預(yù)留充足的冗余,這里選擇了一款1 Gbit的NAND FLASH。
1.3 多通道采集存儲(chǔ)程序設(shè)計(jì)
運(yùn)動(dòng)狀態(tài)自感知裝置的主要流程是MEMS加速度傳感器采集加速度信號(hào),然后通過(guò)信號(hào)調(diào)理電路產(chǎn)生初步處理的模擬信號(hào),通過(guò)數(shù)模轉(zhuǎn)換電路將模擬信號(hào)轉(zhuǎn)換成數(shù)字信號(hào),再通過(guò)FIFO存儲(chǔ)到FLASH中。在數(shù)據(jù)讀取時(shí),通過(guò)上位機(jī)軟件向FPGA發(fā)送數(shù)據(jù)采集信號(hào),該裝置通過(guò)串口協(xié)議將存儲(chǔ)在FALSH中加速度數(shù)據(jù)[17]傳輸?shù)缴衔粰C(jī)中,從而完成了加速度信號(hào)的采集、存儲(chǔ)和讀取等工作。在數(shù)據(jù)去完成后,使用上位機(jī)分析處理的數(shù)據(jù),并與建立的數(shù)據(jù)數(shù)據(jù)庫(kù)進(jìn)行比較,得出分析結(jié)果,完成對(duì)小口徑火炮射擊參數(shù)的自感知。系統(tǒng)自感知工作流程如圖6所示。
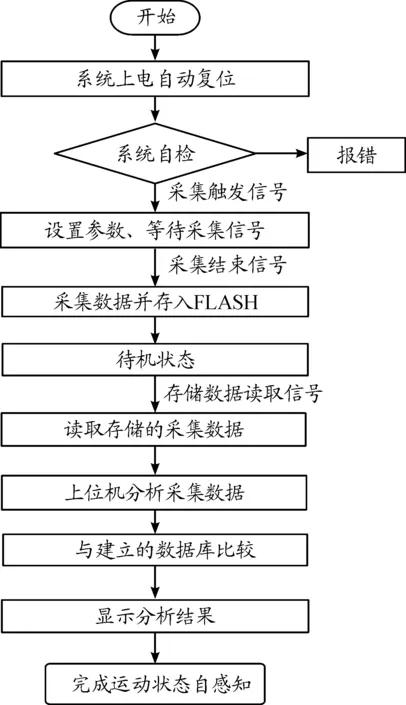
圖6 運(yùn)動(dòng)狀態(tài)自感知裝置工作流程框圖
2 試驗(yàn)驗(yàn)證及分析
結(jié)合前期相關(guān)研究試驗(yàn)的條件,分別對(duì)某型小口徑火炮進(jìn)行了單次和5連發(fā)發(fā)射數(shù)據(jù)采集。由于火炮發(fā)射過(guò)程中只有火炮發(fā)射發(fā)現(xiàn)會(huì)產(chǎn)生較明顯的加速度,試驗(yàn)中實(shí)測(cè)火炮數(shù)據(jù)Z(t)為火炮平射過(guò)程中小口徑火炮發(fā)射方向上的MEMS加速度傳感器采集的加速度信號(hào),某型小口徑火炮的單次發(fā)射試驗(yàn)原始數(shù)據(jù)如圖7所示。
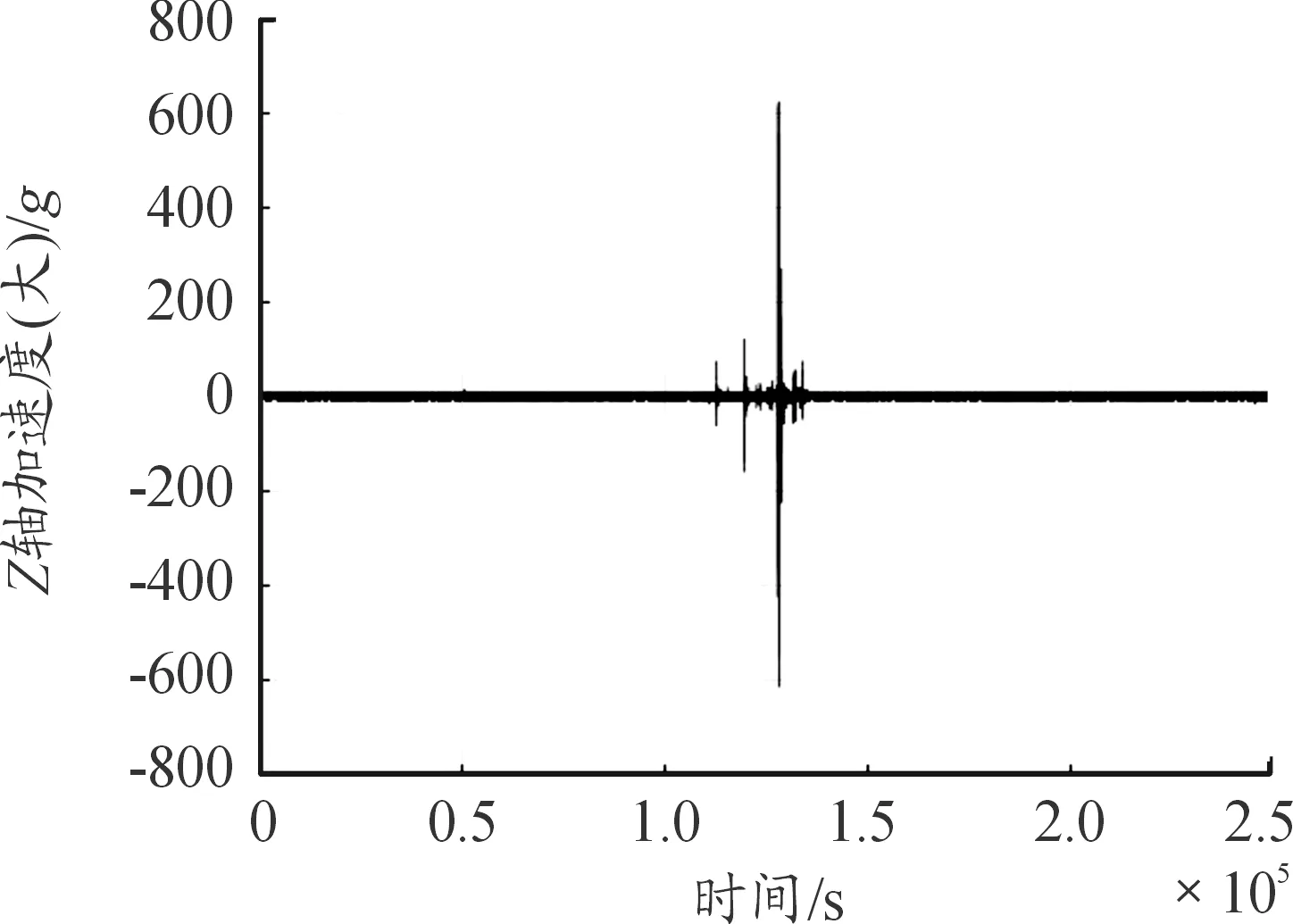
圖7 測(cè)量原始數(shù)據(jù)曲線
因?yàn)椴杉男盘?hào)主要為低頻信號(hào),將對(duì)數(shù)據(jù)的高頻部分進(jìn)行濾波處理以及對(duì)噪聲進(jìn)行處理。將通過(guò)分析噪聲的頻譜圖如圖8所示,分析其噪聲的頻率范圍,通常碰撞產(chǎn)生的頻率在5 kHz以?xún)?nèi)信號(hào)的都認(rèn)為是有效信號(hào)。但是當(dāng)對(duì)傳感器進(jìn)行標(biāo)定的時(shí)候發(fā)現(xiàn),將1 kHz以上的數(shù)據(jù)進(jìn)行濾波時(shí),處理結(jié)果與標(biāo)定時(shí)的標(biāo)準(zhǔn)傳感器結(jié)果更為接近。

圖8 噪聲頻譜
對(duì)采集原始數(shù)據(jù)進(jìn)行濾波,然后選取需要時(shí)間段進(jìn)行分析[18]。
某型小口徑火炮的某次單發(fā)試驗(yàn)曲線如圖9所示,每張圖包含4個(gè)圖像,依次為炮箱加速度原始曲線(左上)、加速度原始數(shù)據(jù)的噪聲頻譜分析(右上)、去噪處理后炮箱加速度曲線(左下)、處理后的局部炮箱加速度曲線(右下)。
某型小口徑火炮的一次5連發(fā)試驗(yàn)分析如圖10所示,每張圖包含4個(gè)圖像,依次為炮箱加速度原始曲線(左上)、加速度原始數(shù)據(jù)的噪聲頻譜分析(右上)、去噪處理后炮箱加速度曲線(左下)、處理后的局部炮箱加速度曲線(右下)。
通過(guò)分析圖9可以發(fā)現(xiàn),加速度值在炮射擊時(shí)出現(xiàn)整個(gè)射擊過(guò)程中的峰值,大概在120g左右,緊接著是由于火炮發(fā)射后坐力所帶來(lái)的負(fù)向加速度,峰值在-50g上下波動(dòng)。整體加速度測(cè)試數(shù)據(jù)與火炮發(fā)射的經(jīng)驗(yàn)數(shù)據(jù)以及圖1軟件仿真數(shù)據(jù)吻合。由于火炮發(fā)射不同炮彈產(chǎn)生的加速度有很大的區(qū)別,這里可以通過(guò)波形和幅值判斷炮彈的種類(lèi)。通過(guò)分析圖10,可以很清晰、簡(jiǎn)單地分辨火炮發(fā)射的數(shù)量為5發(fā),且5連發(fā)射擊過(guò)程中的單次波形與之前單發(fā)采集的波形吻合,符合設(shè)計(jì)要求。
圖9 火炮單發(fā)試驗(yàn)曲線
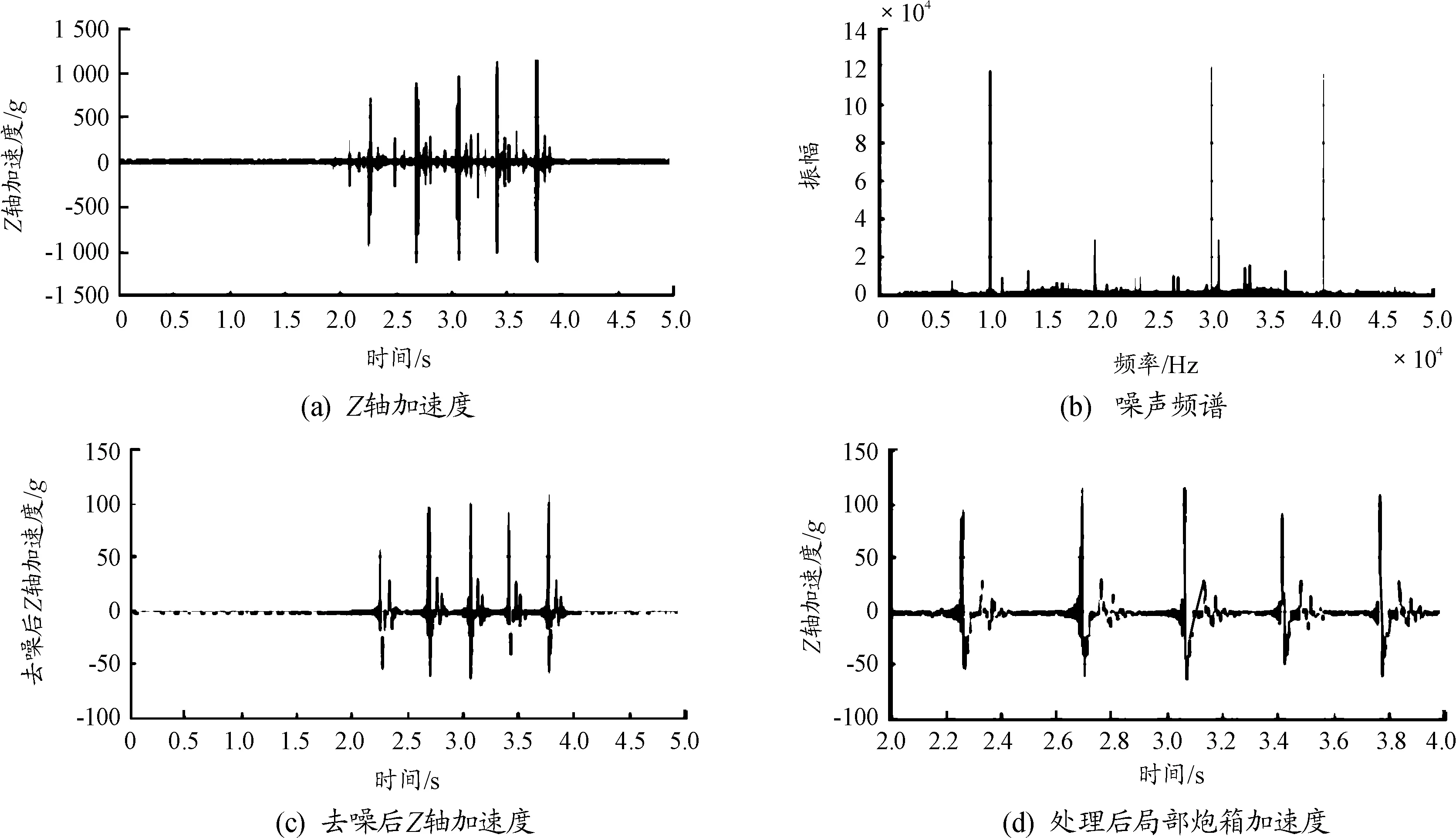
圖10 火炮發(fā)五連發(fā)試驗(yàn)曲線
3 結(jié)論
1) 基于FPGA和MEMS傳感器設(shè)計(jì)了一款火炮運(yùn)動(dòng)狀態(tài)自感知裝置,體積小、可裝卸、精度高,并在靶場(chǎng)進(jìn)行了多次單發(fā)射擊試驗(yàn)和一次5連發(fā)射擊試驗(yàn),試驗(yàn)結(jié)果符合設(shè)計(jì)要求。
2) 通過(guò)不斷的實(shí)驗(yàn)數(shù)據(jù)積累,逐漸建立火炮的發(fā)射數(shù)據(jù)庫(kù),通過(guò)采集數(shù)據(jù)與數(shù)據(jù)庫(kù)進(jìn)行比對(duì)可以完成對(duì)發(fā)射參數(shù)的自感知,對(duì)采集的數(shù)據(jù)分析可以為火炮的設(shè)計(jì)和改進(jìn)提供重要參考。
3) 該裝置使用有串口讀取數(shù)據(jù)現(xiàn)象,讀取數(shù)據(jù)速度一般,也未建立智能化的自感知診斷模型,這都是后期要努力主攻的方向。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06