不同繩網材料對無人機攔截效果的影響分析
2021-06-02 02:23:28刁貞君李忠新
兵器裝備工程學報 2021年5期
關鍵詞:模型
刁貞君,李忠新
(南京理工大學 機械工程學院, 南京 210094)
隨著信息、光電、材料、控制等相關技術的深入研究,無人機技術深入到人們的日常工作生活中,無人機的廣泛運用在提高生產效率的同時,其濫用、“黑飛”問題也嚴重影響航空安全。近年來,眾多無人機在集會、機場等重要場合的“黑飛”事件造成了嚴重的社會影響。現有的反無人機系統(tǒng)總體上可以分為干擾阻斷、毀傷抓捕和監(jiān)測控制三大類[1],相比于其他兩種方式,毀傷抓捕類反無人機系統(tǒng)可以適用于電磁環(huán)境復雜且易受干擾的環(huán)境,且對比采取直接動能擊毀的方法,利用繩網攔截的方式完成無人機捕獲,不僅成本低、體積小,也可以避免直接打擊所造成的二次損傷。
針對繩網的建模與碰撞仿真問題,目前國內外研究人員進行了大量的工作,張江[2]針對繩網動力學建模方式,推導出中心軸線柔索單元模型和集中質量繩索單元模型,并推導出基于非線性彈簧阻尼模型和庫侖摩擦模型的碰撞力和摩擦力公式,給出了碰撞檢測的流程以及碰撞檢測判據;劉彤等[3]通過Verlet數值積分方法結合彈簧-質點模型建立飛網,并通過點到組合體的距離判斷捕獲階段是否發(fā)生碰撞;胡明[4]利用LS-DYNA軟件結合有限元方法,對警用網彈內展開網捕捉球體進行了仿真分析;Benvenuto等[5]利用罰剛度碰撞方法對繩網捕獲正方體目標過程進行仿真,分析了碰撞過程繩網的位形變化。
1 繩網攔截無人機失效分析
1.1 無人機的工作原理
常用的無人機多為四旋翼形式,其主要由4個電機、4個旋翼、機架、電池、遙控、飛控等組成[6]。其結構形式如圖1所示,四旋翼無人機通過改變旋翼轉速,實現升力的變化,從而控制飛行器的姿態(tài)和位置。無人機做垂直運動,是通過同時增加4個電機的輸出功率,增大旋翼轉速,使得總的拉力增大,當總拉力足以克服整機的重量時,四旋翼飛行器便垂直上升。無人機完成俯仰運動,是通過改變電機1、3的轉速,保持電機2、4的轉速,由此產生的不平衡力矩實現的。無人機的水平運動,是通過使無人機發(fā)生一定程度的傾斜,從而使旋翼拉力產生水平分量,實現無人機的前后運動。
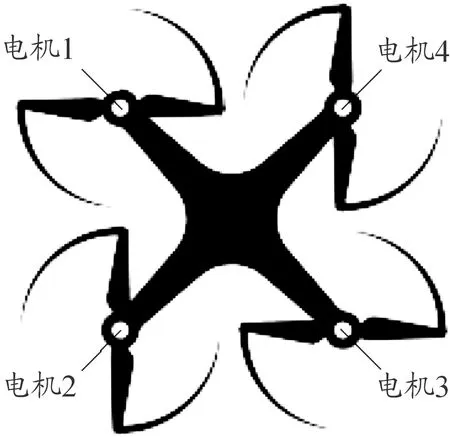
圖1 四旋翼無人機結構形式示意圖
1.2 繩網攔截原理
從旋翼無人機的組成結構來看,其旋翼及電機的正常使用決定了無人機的飛行穩(wěn)定。由于四旋翼無人機的電機1和電機3逆時針旋轉的同時,電機2和電機4順時針旋轉,因此當飛行器平衡飛行時,其陀螺效應和空氣動力扭矩效應均被抵消。當無人機其中某一個旋翼失效,都將導致無人機受力不平衡,出現無人機胡亂翻滾的現象。繩網攔截無人機過程中,繩網使四旋翼無人機的旋翼發(fā)生轉速不規(guī)則改變,通過破壞無人機的受力平衡,使無人機失去控制,完成攔截目標。本文的繩網及牽引體是利用彈丸在外彈道過程時受到的離心力完成展開過程,因此在下文中針對旋轉繩網攔截過程進行了仿真分析。
2 旋轉繩網攔截仿真分析
本文主要研究旋轉繩網對于旋翼的旋轉運動影響,為了提高計算效率,將旋翼模型設置成剛體,其網格劃分結果如圖2所示。
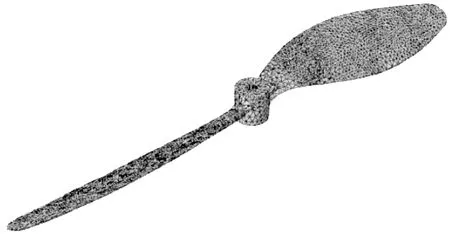
圖2 旋翼網格劃分示意圖
根據上述的繩網攔截原理,針對旋轉繩網攔截無人機過程,取單一旋翼作為仿真對象,分析不同材料的旋轉繩網對旋翼作用效果的影響。為了簡化攔截模型,在不影響結果的情況下,針對旋轉繩網攔截過程做如下假設:
1) 旋轉繩網在與無人機旋翼接觸碰撞前始終保持網形展開;
2) 所模擬的無人機旋翼與繩網接觸為近距離接觸,二者之間為相對直線運動,忽略繩網重力及繩網飛行的阻力;
3) 接觸分析中,牽引體與繩網速度相同,不考慮牽引體形狀等其他因素對繩網的影響。
2.1 動力學模型
繩網攔截過程的動力學模型包括繩網動力學模型即繩網的建模和繩網碰撞模型的建模兩部分。利用有限元原理對繩網進行離散化處理,將繩網離散化為若干個微元段,采用桁架單元來模擬每個微元段構建繩網[7]。
桁架單元之間的張力為Tij,即
(1)

(2)
式(2)中:E為彈性模量,由繩索材料決定;Aij為繩索截面積。
桁架單元由節(jié)點i指向節(jié)點j的單位向量為:
(3)
忽略地球引力和大氣的作用,在旋轉繩網攔截過程中,繩段所受外力為繩段與無人機旋翼的接觸力Fi。
設某節(jié)點i的質量為mi,節(jié)點i在慣性坐標系下的動力學方程可表示為:
(4)
2.2 有限元模型
本文針對旋轉繩網攔截過程中繩網的非線性特點,采用ABAQUS/Explict模塊[8]對旋轉繩網攔截過程進行動力學仿真,將發(fā)射后完全展開的旋轉繩網與無人機旋翼作為仿真對象,仿真旋轉繩網與旋翼的攔截捕獲過程,在仿真模型中取旋轉繩網的中心點作為整體坐標系的原點,Z軸垂直于繩網面,繩網與旋翼的攔截仿真模型如圖3所示。
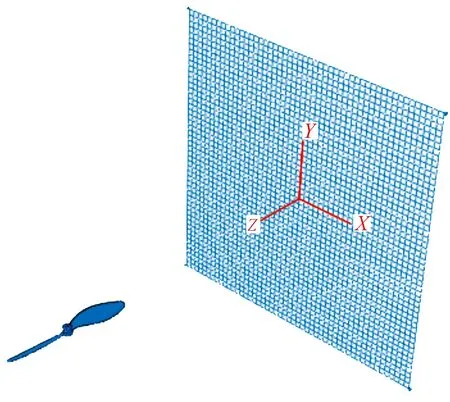
圖3 攔截過程仿真模型示意圖
圖3中旋轉繩網采用網目為正方向的正四邊形網,為了簡化仿真,4個牽引質量塊簡化為實心球體的形式,對旋轉繩網采用三維桁架單元T3D2進行網格劃分,繩網被劃分為5 100個單元,將牽引體采用三維實體單元C3D8R進行網格劃分,單個牽引體被劃分為638個單元,將旋翼采用三維實體單元C3D10M進行劃分,旋翼被劃分為15 451個單元。
針對旋轉繩網攔截過程中繩網與旋翼的接觸定義,采用罰函數原理,其基本原理是在每一時間步上模擬計算各節(jié)點相對位置,從而判定從節(jié)點對主面的穿透狀況[9]。當二者存在穿透時,在主從面間出現界面接觸力,由于旋翼為剛體,根據主從面選擇的基本原則,設定此旋翼面為主面,接觸的旋轉繩網為從面,罰函數因子為0.3。
2.3 仿真參數
旋轉繩網的網體尺寸為2 m×2 m,網格大小為0.04 m×0.04 m,網繩的截面直徑為1.2 mm,旋轉繩網的預定義旋轉速度為80 rad/s,沿Z軸正方向速度為50 m/s,繩網材料選取目前常用的4種繩網材料,其參數如表1所示。
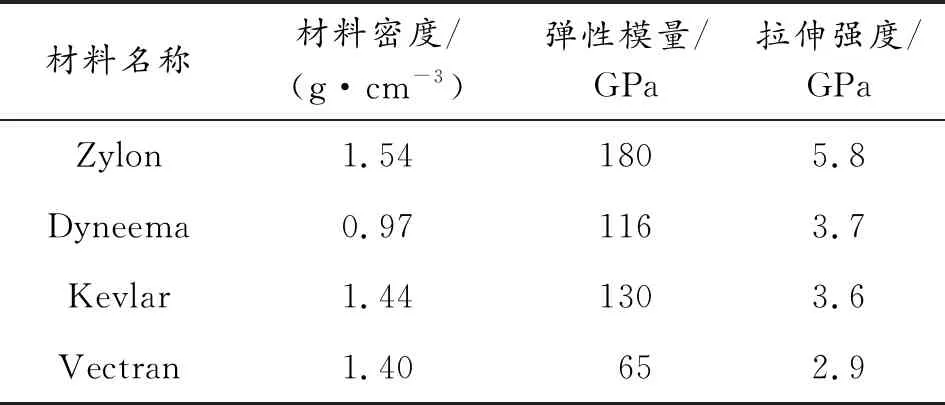
表1 繩網材料參數
仿真過程中,將旋翼和牽引體進行剛性約束,旋翼及牽引體材料參數分別見表2和表3。旋翼的預定義旋轉速度為600 rad/s,沿Z軸負方向為10 m/s,旋轉繩網沿Z軸正方向水平運動同時繞著繩網中心點旋轉,繩網與旋翼沿Z軸方向初始距離為2 m,接觸仿真求解時間設置為0.6 s,使繩網與各目標接觸碰撞初始時刻均為0.03 s,接觸時間均為0.57 s。

表2 牽引體材料參數

表3 材料旋翼參數
2.4 攔截評價效果
理想的繩網攔截過程,繩網應當能夠快速攔截捕獲目標,并避免捕獲的目標產生較大碎片,影響攔截可靠性及發(fā)射平臺的安全。為了衡量不同材料的繩網對旋翼的攔截影響,針對旋轉繩網攔截過程,提出以下因素作為評價標準,方便下文進行討論分析。
1) 接觸力Fi:繩網攔截旋翼過程中旋轉繩網與旋翼之間的接觸力大小,可以衡量不同材料的繩網與旋翼的作用力效果,較小的接觸力可降低旋翼產生微小碎片的風險。
2) 旋翼的旋轉速度變化量Δω、沿Z軸水平方向速度變化量Δv:旋轉繩網攔截旋翼過程中旋翼的旋轉速度和位移的變化量,可以衡量不同材料的繩網對旋翼運動狀態(tài)的影響,單位時間內較大的變化量能夠保證攔截的及時性、有效性。
2.5 仿真結果分析
根據上文所得出的評價指標,對旋翼所受到的力及旋翼的旋轉速度、水平速度進行分析,分析不同材料對旋翼旋轉運動的影響,圖4為4種材料在0.06 s繩網開始纏繞旋翼的效果圖。
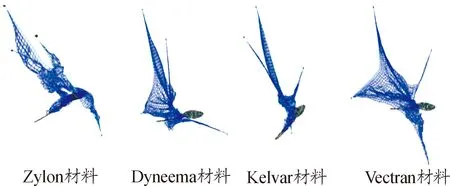
圖4 0.06 s不同材料繩網攔截效果示意圖
2.5.1 繩網攔截旋翼的角速度分析
4種不同材料的繩網對旋翼轉速的影響見圖5。當0.03 s后,旋轉繩網與旋翼之間產生接觸,旋翼的旋轉速度下降。在0.03 s到0.3 s間,采用Zylon材料的繩網使旋翼的旋轉速度下降最快,且相比其他3種材料使旋翼下降的速度值最大。為了保證攔截無人機過程的及時性,需要在較短的時間內使無人機旋翼的旋轉速度快速變化,仿真表明,采用Zylon材料在4種材料中對于旋翼的角速度影響最大,能夠及時完成攔截任務。
2.5.2 繩網攔截旋翼受到的碰撞力分析
旋翼與不同材料的繩網在Z軸方向0.03 s前,二者間未發(fā)生接觸,因此碰撞力為零,在0.03 s后二者發(fā)生碰撞,不同材料的碰撞力曲線如圖6。
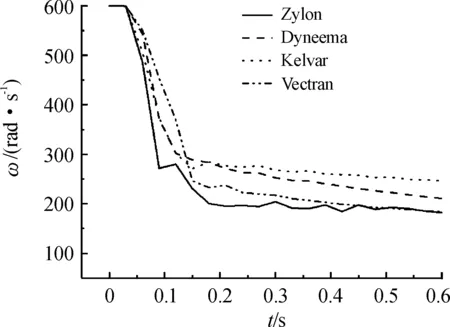
圖5 不同材料繩網攔截旋翼的角速度曲線
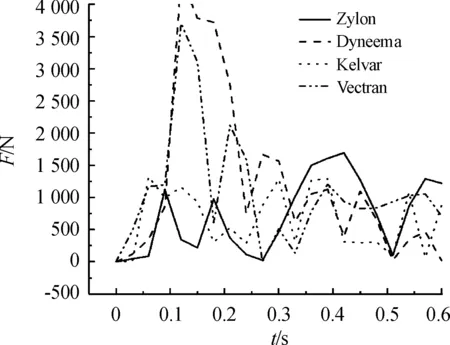
圖6 不同材料繩網攔截旋翼的碰撞力曲線
4種材料繩網與旋翼的作用力曲線整體呈振蕩趨勢。在0.03 s到0.1 s間,旋翼與繩網發(fā)生接觸,但由于繩段的柔軟特性,碰撞力較小,之后當繩網處于抻直狀態(tài)時,其與旋翼的碰撞力逐達到峰值,Zylon繩網的旋翼在0.42 s時碰撞力最大,約為1 693.15 N;Dyneema繩網的旋翼在0.12 s時碰撞力最大,約為4 417.30 N;Kelvar繩網的旋翼在0.06 s時碰撞力最大,約為1 320.34 N;Vectran繩網的旋翼在0.12 s時碰撞力最大,約為3 706.84 N。為了降低繩網攔截過程中被捕獲物產生碎片的可能性,因此攔截過程中二者碰撞力應較小,仿真結果表明:Zylon和Kelvar繩網材料的旋翼受到的接觸力相對較小,能夠較好地吸收沖擊能量;Dyneema繩網材料相比其他3種材料進行攔截時,旋翼受到的接觸力較大,產生碎片風險的可能性較高。
2.5.3 繩網攔截旋翼的水平速度分析
在旋轉繩網攔截過程中,旋翼在Z方向的速度變化如圖7所示。在0~0.06 s之間,Zylon材料的繩網攔截旋翼速度下降最快。仿真結果表明:Zylon材料的繩網攔截旋翼時,對Z方向的速度影響最大,能夠及時完成攔截任務。
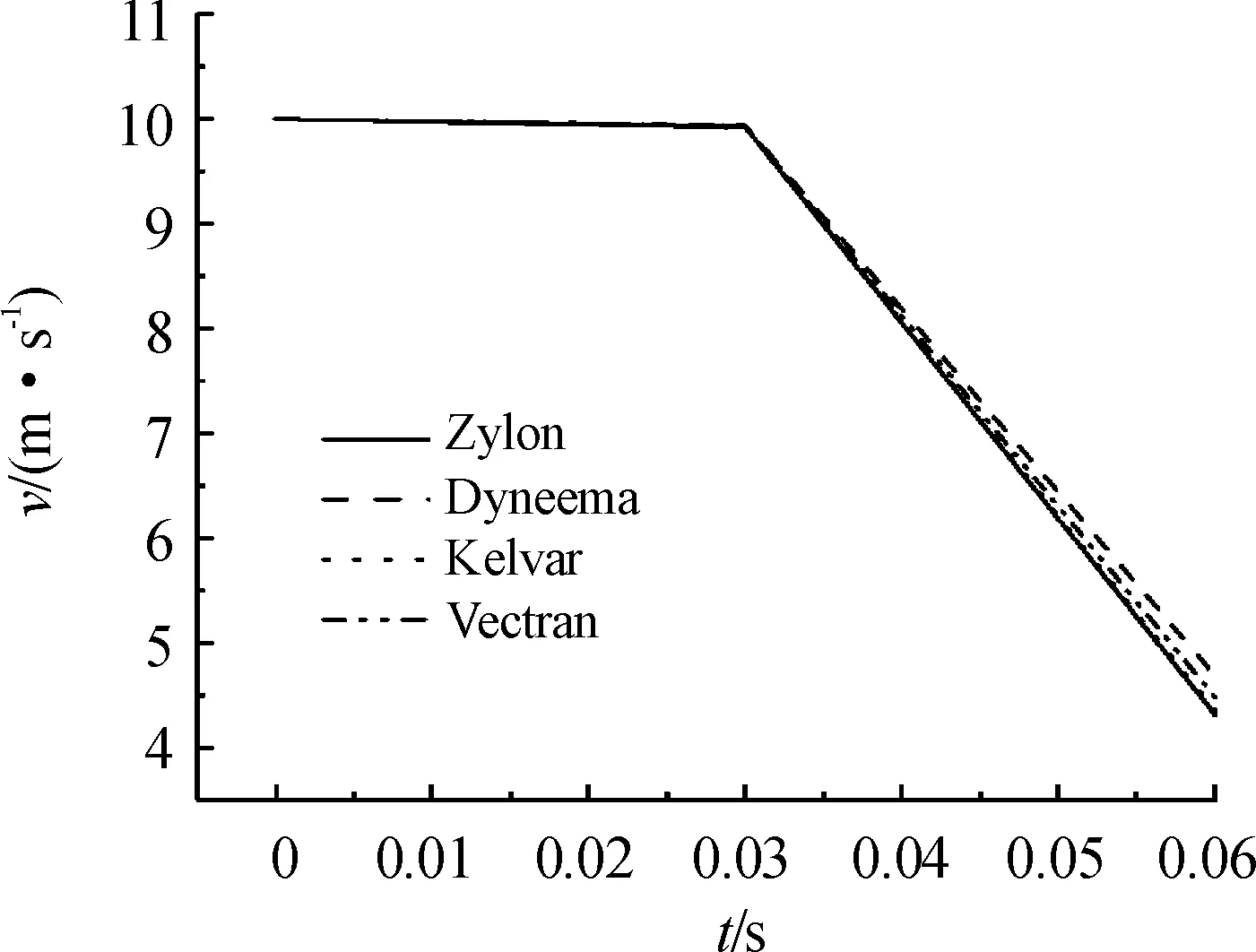
圖7 不同材料繩網攔截旋翼的水平速度曲線
3 結論
1) 通過旋轉繩網攔截可以快速改變旋翼的角速度,破壞其受力平衡,完成對四旋翼無人機的攔截捕獲。
2) Zylon材料的旋轉繩網攔截無人機旋翼,相比其他三種材料,在接觸發(fā)生的0.03~0.3 s內,其角速度變化及Z方向的速度變化量較大,能夠及時完成攔截過程。
3) Zylon和Kelvar材料的旋轉繩網攔截無人機旋翼時,相比其他2種材料旋翼碰撞力較小,能夠較好地吸收沖擊能量,Dyneema材料受到的碰撞力較大。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19