軸向磁通電機(jī)控制方法綜述
2021-06-02 01:53:24潘忠亮趙慧超暴杰李帥
汽車文摘 2021年6期
潘忠亮 趙慧超 暴杰 李帥
(1.中國第一汽車股份有限公司新能源開發(fā)院,長春130013;2.汽車振動(dòng)噪聲與安全控制綜合技術(shù)國家重點(diǎn)實(shí)驗(yàn)室,長春130013)
主題詞:軸向磁通 控制 數(shù)學(xué)模型 非數(shù)學(xué)模型 電機(jī) 電動(dòng)汽車
縮略語
AFFSPM Axial Field Flux-Switching Permanent Magnet FOC Field Orient Control DTC Direct Torque Control MTPC Model Direct Torque Control MTPA Most Torque Per Ampere PID Proportional Integral Derivative CVC Complete Vehicle Control SVPWM Space Vector Pulse Width Modulation HEAFFSPM Hybrid Excited Axial Field
Flux-Switching Permanent Magnet CHBPWM Current Hysteresis Band Pulse Width Modulation ASR Automatic Speed Regulator
1 前言
AFFSPMM因高比功率和高轉(zhuǎn)矩密度的優(yōu)點(diǎn)[1-2],目前已廣泛應(yīng)用于家電、汽車和航天等領(lǐng)域。根據(jù)定轉(zhuǎn)子數(shù)量、定轉(zhuǎn)子相對位置和主磁路不同,可分為單定子單轉(zhuǎn)子結(jié)構(gòu)、雙定子單轉(zhuǎn)子kaman結(jié)構(gòu)、單定子雙轉(zhuǎn)子Torus-NN結(jié)構(gòu)、單定子雙轉(zhuǎn)子Torus-NS結(jié)構(gòu)和多盤式結(jié)構(gòu)5類[3-4]。盡管AFFSPM電磁力作用方式不同于徑向磁通電機(jī)電磁力,但AFFSPM的數(shù)學(xué)模型和數(shù)學(xué)方程與徑向磁通電機(jī)相同[5-6],所以AFFSPM與徑向磁通電機(jī)控制方法相近。根據(jù)電磁力作用方式的不同,本文將AFFSPM控制方法分為基于AFFSPM數(shù)學(xué)模型的控制方法和不基于AFFSPM數(shù)學(xué)模型的控制方法進(jìn)行闡述。在基于AFFSPM數(shù)學(xué)模型中,應(yīng)用轉(zhuǎn)子磁場定向矢量控制(Field Orient Control,FOC)方案、單位功率因數(shù)控制方案、模糊自適應(yīng)PID控制方案和電機(jī)效率優(yōu)化控制方案達(dá)到相應(yīng)的控制效果。在不依靠軸向磁通電機(jī)數(shù)學(xué)模型的控制方法中,介紹了AFFSPM的傳統(tǒng)控制方案、直接轉(zhuǎn)矩控制(Direct Torque Control,DTC)方案和模型預(yù)測轉(zhuǎn)矩控制(Model Direct Torque Control,MTPC)方案。
2 基于AFFSPM數(shù)學(xué)模型的控制方法
基于AFFSPM數(shù)學(xué)模型的控制方法即應(yīng)用坐標(biāo)變換實(shí)現(xiàn)FOC控制方法,達(dá)到定子電流轉(zhuǎn)矩分量和磁鏈分量的解耦控制,將交流電機(jī)轉(zhuǎn)化為直流電機(jī)控制,實(shí)現(xiàn)大轉(zhuǎn)矩、高轉(zhuǎn)速且高控制精度[7]。
2.1 FOC方案
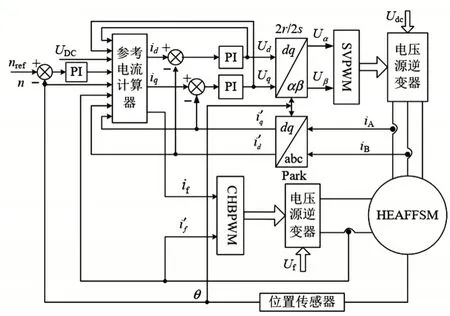
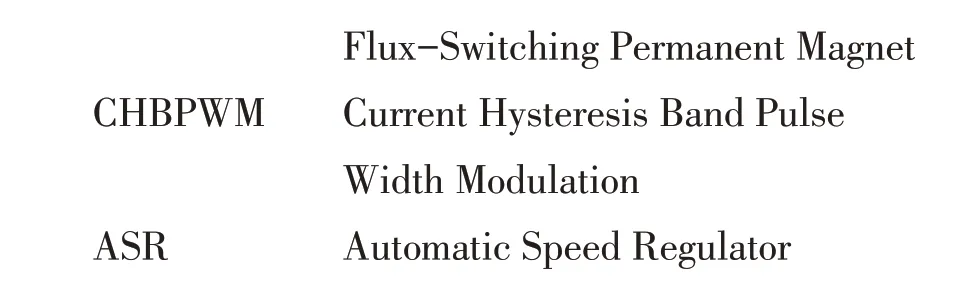
圖1 混合勵(lì)磁軸向磁場磁通切換電機(jī)控制[8]
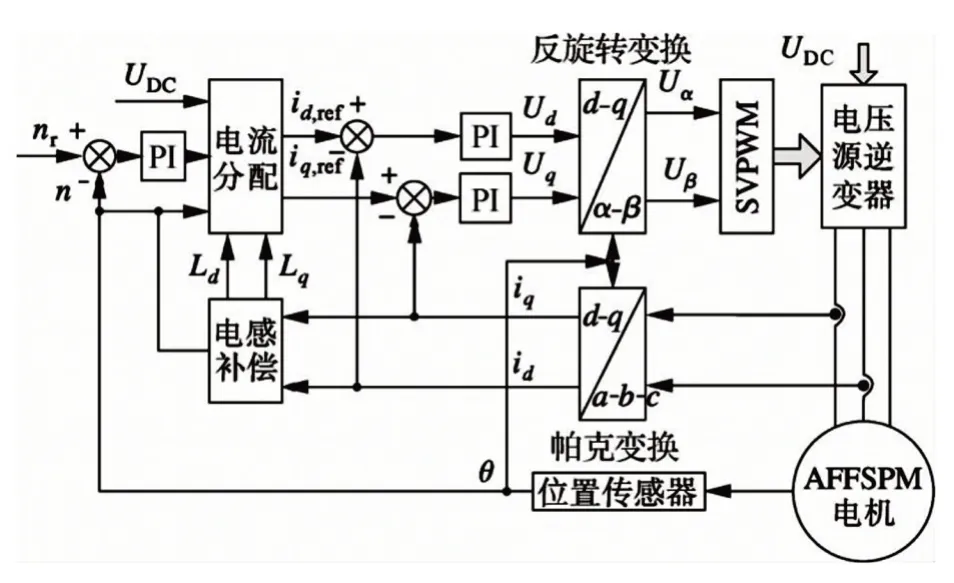
圖2 AFFSPM電感補(bǔ)償控制[7]
基于AFFSPM電機(jī)數(shù)學(xué)模型,文獻(xiàn)[8],趙紀(jì)龍,林明耀,徐妲等將其工作區(qū)域分為低速區(qū)和高速區(qū),進(jìn)而分析AFFSPM在整個(gè)運(yùn)行區(qū)域的運(yùn)行特性[8]。圖1為混合勵(lì)磁軸向磁場磁通切換電機(jī)控制框圖,在電流區(qū),保證d軸電流為0不變,將q軸電流賦值進(jìn)行控制。在電壓區(qū),以電壓幅值與直流母線電容電壓差值為依據(jù),判斷進(jìn)退弱磁的控制時(shí)刻,實(shí)現(xiàn)了弱磁控制。該弱磁控制策略可提高直流母線電壓利用率,增大電機(jī)轉(zhuǎn)速工作區(qū)間,相同轉(zhuǎn)速條件下輸出轉(zhuǎn)矩能力更強(qiáng)。在電流區(qū)采用最大轉(zhuǎn)矩電流比(Most Torque Per Ampere,MTPA)控制策略,并與d軸電流為0的控制方式進(jìn)行比較。圖2為軸向磁通電機(jī)電感補(bǔ)償控制框圖。在電壓區(qū),基于電感補(bǔ)償且保持q軸反電勢不變的弱磁控制方案,并與常規(guī)弱磁控制進(jìn)行了對比。試驗(yàn)結(jié)果表明,MTPA控制可以減小電機(jī)銅耗,提高了電機(jī)系統(tǒng)效率。基于電感補(bǔ)償?shù)娜醮趴刂瓶稍龃箅姍C(jī)在電壓區(qū)工作的轉(zhuǎn)速范圍。不同負(fù)載工況下調(diào)節(jié)不同功率因數(shù),驗(yàn)證算法的有效性,提高了電機(jī)輸出性能[9]。
2.2 單位功率因數(shù)控制方案
為提高AFFSPM系統(tǒng)的有功功率,解決AFFSPM最大轉(zhuǎn)矩電流比(MTPA)控制功率因數(shù)低的問題,主要可從提高功率因數(shù)為目標(biāo)[10]。圖3為AFFSPM功率因數(shù)控制框圖,在滿足軸向AFFSPM轉(zhuǎn)速和轉(zhuǎn)矩要求的前提下,采用單位功率因數(shù)(cos=1)控制方案,將目標(biāo)轉(zhuǎn)速和反饋轉(zhuǎn)速進(jìn)行PID控制,輸出值與直流母線電壓、反饋轉(zhuǎn)速共同作為功率因數(shù)控制器的輸入,輸出為目標(biāo)d、q軸電流。結(jié)果表明單位功率因數(shù)控制方案可將AFFSPM電機(jī)的功率因數(shù)提高到所需范圍,彌補(bǔ)MTPA控制下有功功率低的缺點(diǎn)[11]。同樣AFFSPM也適合用于電動(dòng)汽車與風(fēng)力發(fā)電系統(tǒng)。

圖3 AFFSPM功率因數(shù)控制[10]
2.3 模糊自適應(yīng)PID控制方案
模糊自適應(yīng)PID控制是指具有自適應(yīng)學(xué)習(xí)算法的模糊邏輯系統(tǒng),是指靠數(shù)據(jù)來調(diào)節(jié)模糊系統(tǒng)的參數(shù)[12-13]。單個(gè)自適應(yīng)模糊控制器可由單一的自適應(yīng)模糊系統(tǒng)構(gòu)成,也可由若干自適應(yīng)模糊系統(tǒng)構(gòu)成[14]。與傳統(tǒng)的自適應(yīng)控制相比,模糊自適應(yīng)控制的優(yōu)點(diǎn)在于它可識(shí)別系統(tǒng)提供的模糊性語言,而傳統(tǒng)的自適應(yīng)控制則不能。此方案對高度不確定因素的系統(tǒng)尤其關(guān)鍵[15],針對AFFSPM采用模糊器和解模糊器的控制算法,如圖4為模糊自適應(yīng)PID的AFFSPM電機(jī)CVC框圖。根據(jù)實(shí)際系統(tǒng)反饋轉(zhuǎn)速與理想轉(zhuǎn)速之間的偏差,設(shè)計(jì)模糊控制器參數(shù),將模糊控制器應(yīng)用在轉(zhuǎn)速環(huán)調(diào)節(jié)至q軸電流閉環(huán)中。此架構(gòu)可滿足AFFSPM轉(zhuǎn)速突變時(shí)控制系統(tǒng)的穩(wěn)定性[16]。

圖4 模糊自適應(yīng)PID的AFFSPM電機(jī)CVC框圖[16]
2.4 電機(jī)效率優(yōu)化控制方案
電機(jī)效率優(yōu)化控制是指應(yīng)用數(shù)學(xué)方式優(yōu)化電機(jī)損耗,目前應(yīng)用廣泛的是拉格朗日乘數(shù)法求多元函數(shù)極值[17-19]。文獻(xiàn)[20],景夢蝶將變量與約束條件的最優(yōu)問題轉(zhuǎn)換為方程組極值問題,其變量不受任何約束。然后,將擴(kuò)展拉格朗日乘子法計(jì)算電機(jī)在工作區(qū)域的銅耗最小值,基于總損耗的效率優(yōu)化控制方法,構(gòu)建HEAFFSPM電機(jī)驅(qū)動(dòng)控制系統(tǒng)。基于軸向磁通電機(jī)勵(lì)磁理論,如圖5所示[20]。d、q軸參考電流計(jì)算模塊同時(shí)考慮電機(jī)銅耗與鐵耗的效率優(yōu)化控制策略,即在電機(jī)整個(gè)運(yùn)行區(qū)域內(nèi),不同運(yùn)行工況下,通過優(yōu)化id、iq和if,保證總的損耗最小,最終實(shí)現(xiàn)控制系統(tǒng)的最小損耗運(yùn)行,提高電機(jī)帯負(fù)載能力,增大電機(jī)恒功率轉(zhuǎn)速運(yùn)行范圍,提高系統(tǒng)運(yùn)行效率[20]。
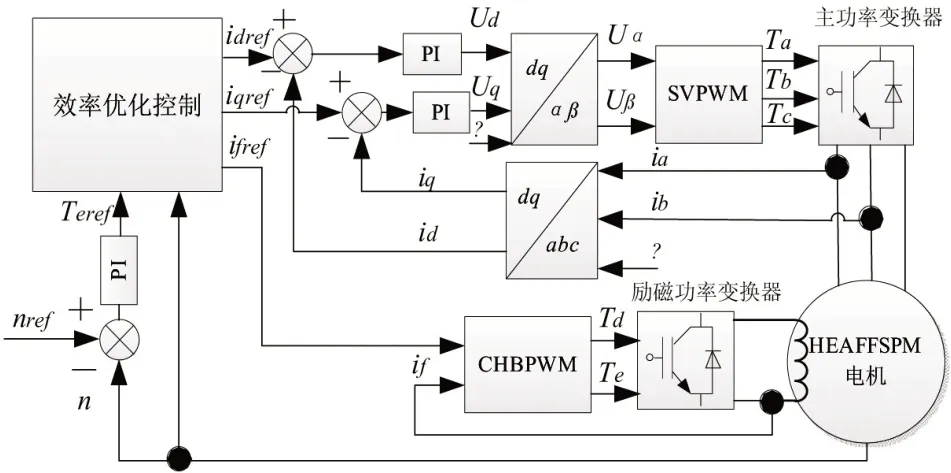
圖5 電機(jī)效率優(yōu)化控制系統(tǒng)框圖[20]
3 非AFFSPM數(shù)學(xué)模型的控制方式
非AFFSPM數(shù)學(xué)模型的控制方式結(jié)構(gòu)簡單,運(yùn)行速度較快。相比基于AFFSPM電機(jī)數(shù)學(xué)模型的控制方式而言,具有占用系統(tǒng)負(fù)載率較低的優(yōu)點(diǎn),但也存在轉(zhuǎn)矩輸出波動(dòng)不平穩(wěn)和電流較大的情況。主要以傳統(tǒng)斬波控制方案、DTC方案和MTPC方案這3個(gè)控制方案進(jìn)行介紹。
3.1 傳統(tǒng)斬波控制方案
傳統(tǒng)斬波控制方案主要有電流斬波、電壓斬波和角度位置斬波3種[21-23]。
(1)電流斬波控制
電流斬波控制為電機(jī)傳統(tǒng)控制方式,常用于電機(jī)啟動(dòng)階段或者電機(jī)轉(zhuǎn)速較低時(shí),此時(shí)反電勢較小,電流變化較大,電流上升速度快,很可能破壞功率器件,為保證電流峰值在安全值范圍之內(nèi)[24]。控制方案的優(yōu)點(diǎn)適用于電機(jī)在低速運(yùn)行時(shí),對電流峰值的增長起到了很好的限制作用,電機(jī)輸出轉(zhuǎn)矩比較平穩(wěn)。
(2)電壓斬波控制
電壓斬波控制是固定開關(guān)的通斷時(shí)間,調(diào)整斬波的占空比,從而改變相電壓和相電流[25]。
(3)角度位置斬波控制
角度位置斬波控制是指在電機(jī)高速運(yùn)行時(shí),電流的上升速率較低,電流幅值與電流變化率比低速運(yùn)行時(shí)小,此時(shí)可通過角度位置來控制開通關(guān)斷時(shí)刻,進(jìn)而改變開關(guān)的導(dǎo)通時(shí)間來控制電機(jī)運(yùn)行。電流幅值的峰值、有效值以及電流波形與電感波形的相對位置都可以通過改變開通角和關(guān)斷角來調(diào)整。
目前,在汽車電機(jī)控制器中,已經(jīng)較少應(yīng)用以上3種傳統(tǒng)斬波方案。
3.2 DTC方案
通過對電機(jī)結(jié)構(gòu)、參數(shù)和材料進(jìn)行優(yōu)化設(shè)計(jì),文獻(xiàn)[27]中,Malyshev,Ivanov提出了一種基于電機(jī)定子磁鏈跟隨的控制策略。使電機(jī)在低轉(zhuǎn)速和高轉(zhuǎn)速都有較好的轉(zhuǎn)矩表現(xiàn)[26-27]。文獻(xiàn)[28]針對傳統(tǒng)的AFFSPM存在加工困難、互感嚴(yán)重的問題,提出了一種定子模塊式AFFSPM[28]。如圖6為模塊式AFFSPM電機(jī)DTC控制框圖,應(yīng)用磁鏈計(jì)算模塊和轉(zhuǎn)矩計(jì)算模塊得到磁鏈估計(jì)值和轉(zhuǎn)矩估計(jì)值,并分別以參考轉(zhuǎn)矩和參考磁鏈進(jìn)行閉環(huán)控制,將閉環(huán)值輸出給開關(guān)狀態(tài)選擇模塊,實(shí)現(xiàn)整個(gè)DTC控制的閉環(huán)[29]。同時(shí),文獻(xiàn)[28]中,張蔚,王文林,於鋒等分析了該模塊式AFFSPM電機(jī)的結(jié)構(gòu)特點(diǎn),推導(dǎo)了該電機(jī)旋轉(zhuǎn)坐標(biāo)系下的數(shù)學(xué)模型,并采用矢量控制對模塊式AFFSPM電機(jī)的靜態(tài)、動(dòng)態(tài)、及低速運(yùn)行等性能進(jìn)行了仿真研究。仿真結(jié)果表明,相比直接轉(zhuǎn)矩控制,采用矢量控制的新型定子模塊式AFFSPM電機(jī)系統(tǒng)具有轉(zhuǎn)矩脈動(dòng)較小、低速性能優(yōu)越的特點(diǎn),更適合用在該新型電機(jī)的變頻調(diào)速控制系統(tǒng)中。
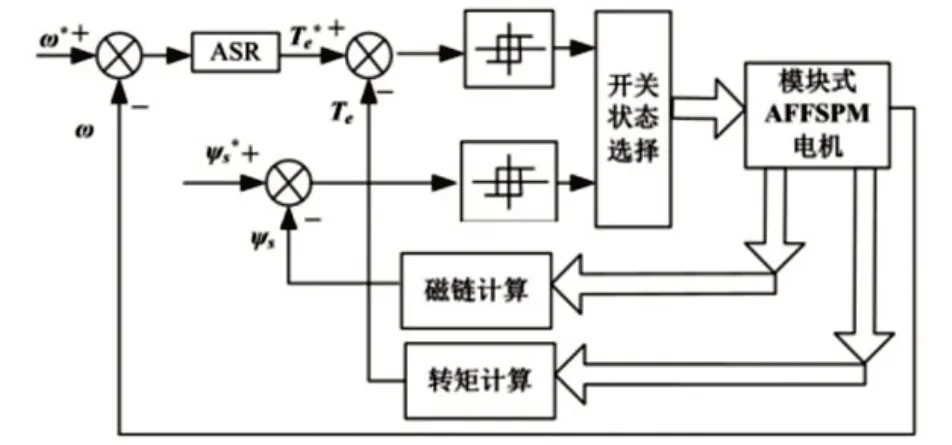
圖6 模塊式AFFSPM電機(jī)DTC控制框圖[28]
3.3 MTPC方案
為提高電驅(qū)動(dòng)系統(tǒng)帶故障運(yùn)行性能,并降低電機(jī)銅耗,袁曉強(qiáng),張蔚,於鋒提出MTPC方案的電機(jī)容錯(cuò)控制策略[30-31]。如圖7為基于MTPC的電機(jī)容錯(cuò)控制系統(tǒng)結(jié)構(gòu)框圖[32],在電機(jī)的結(jié)構(gòu)特征和數(shù)學(xué)模型基礎(chǔ)上,針對三相四橋臂容錯(cuò)逆變器拓?fù)洌诤愦艅?dòng)勢和銅耗最小原則,分別對模型預(yù)測轉(zhuǎn)矩控制和直接轉(zhuǎn)矩控制下的電機(jī)容錯(cuò)控制系統(tǒng)進(jìn)行仿真研究。仿真結(jié)果表明,電機(jī)單相開路故障容錯(cuò)后,2種控制方法均可在降低銅耗的情況下維持電機(jī)轉(zhuǎn)矩、磁鏈基本不變,保證系統(tǒng)穩(wěn)定運(yùn)行。相比于直接轉(zhuǎn)矩控制,采用模型預(yù)測轉(zhuǎn)矩控制的電機(jī)容錯(cuò)控制系統(tǒng)具有較小的轉(zhuǎn)矩和磁鏈脈動(dòng),主要根據(jù)DTC在線查表的控制方式,預(yù)測每個(gè)采樣周期的轉(zhuǎn)矩和磁鏈[33],應(yīng)用價(jià)值函數(shù)來選擇最優(yōu)電壓矢量,即應(yīng)用價(jià)值函數(shù)值最小對應(yīng)的電壓矢量來控制逆變器IGBT通斷。該結(jié)構(gòu)算法簡單,可明顯降低轉(zhuǎn)矩波動(dòng)和磁鏈波動(dòng),提高電機(jī)的響應(yīng)性能,更適合用在電動(dòng)汽車的電機(jī)調(diào)速控制系統(tǒng)中。
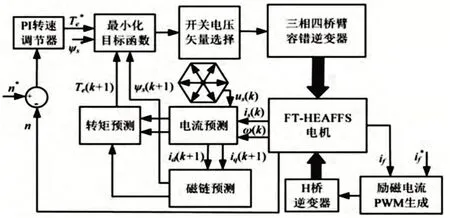
圖7 基于MPTC的電機(jī)容錯(cuò)控制系統(tǒng)[32]
4 結(jié)論及啟示
(1)針對AFFSPM電機(jī)控制方案目前主要有2大類,基于AFFSPM數(shù)學(xué)模型和非AFFSPM數(shù)學(xué)模型。
(2)基于AFFSPM數(shù)學(xué)模型需要用到坐標(biāo)變換的復(fù)雜結(jié)構(gòu),占用芯片內(nèi)存較多,優(yōu)點(diǎn)在于可保證輸出電流和轉(zhuǎn)矩有較高的精度和較低的轉(zhuǎn)矩波動(dòng),適用于對轉(zhuǎn)矩輸出較高的場合,比如新能源汽車電驅(qū)系統(tǒng)中。
(3)非AFFSPM數(shù)學(xué)模型不需依靠坐標(biāo)變換的復(fù)雜結(jié)構(gòu),優(yōu)點(diǎn)是占用芯片內(nèi)存較少,只需根據(jù)電機(jī)轉(zhuǎn)矩估算和磁鏈估算信號(hào),與目標(biāo)值進(jìn)行閉環(huán),達(dá)到控制目的。不足是電機(jī)轉(zhuǎn)矩波動(dòng)較大,電流波動(dòng)帶寬較大。適用于家用空調(diào)電器等場合。
(4)未來軸向磁通電機(jī)控制趨向于容錯(cuò)控制方向發(fā)展,可提高軸向磁通電機(jī)工作的穩(wěn)定性和可靠性。
