軟件定義航空集群機載網(wǎng)絡自適應更新策略
2021-05-29 01:14:54鄒鑫清陳柯帆胡詩駿
空軍工程大學學報 2021年2期
關鍵詞:策略
鄒鑫清, 呂 娜, 陳柯帆, 胡詩駿
(1. 空軍工程大學信息與導航學院, 西安, 710077; 2.空軍裝備部上海局駐蕪湖地區(qū)軍代表室, 安徽蕪湖, 241000)
近年來,隨著現(xiàn)代戰(zhàn)爭逐步趨向信息化和網(wǎng)絡化,航空作戰(zhàn)平臺的更新?lián)Q代正向智能化快速發(fā)展。為了更好地協(xié)調(diào)、重組各類航空作戰(zhàn)平臺,以積極應對未來未知戰(zhàn)場環(huán)境帶來的挑戰(zhàn),衍生于生物集群的航空集群概念被提出[1]。航空集群是由規(guī)模一定、功能多樣的有人/無人航空平臺組成,集群成員間通過簡單、智能和高效的協(xié)作完成復雜任務。
機載網(wǎng)絡作為航空平臺間信息交互的樞紐,是航空集群成員間進行靈巧協(xié)同配合的重要基礎。但長期以來,機載網(wǎng)絡從傳統(tǒng)的“鏈”(航空數(shù)據(jù)鏈)發(fā)展到“網(wǎng)”(航空自組織網(wǎng)),都是針對特定作戰(zhàn)場景所設計,僅能滿足特定作戰(zhàn)任務的需求,且網(wǎng)絡自身的靈活性、可擴展性及互操作性較差,難以滿足未來網(wǎng)絡中心戰(zhàn)作戰(zhàn)環(huán)境中不同系統(tǒng)間的信息交互需求[2]。
軟件定義網(wǎng)絡(software-defined networking, SDN)作為近幾年發(fā)展迅猛的一種新型網(wǎng)絡范式[3],為當前機載網(wǎng)絡面臨的困境提供了全新的突破方法。SDN將網(wǎng)絡的控制平面和數(shù)據(jù)平面分離,基于可編程的開放接口,通過邏輯集中的控制器實現(xiàn)對網(wǎng)絡更靈活、細粒度地管理[4]。由于SDN的優(yōu)勢恰好可以彌補機載網(wǎng)絡的缺陷,文獻[5]將SDN的概念與技術應用于機載網(wǎng)絡中,構建了新一代面向航空集群的網(wǎng)絡——軟件定義航空集群機載網(wǎng)絡(software-defined airborne network of the aviation swarm, SDAN-AS),為機載網(wǎng)絡未來的發(fā)展方向提供了重要參考和借鑒,但卻沒有對SDAN-AS存在的具體關鍵技術問題進行深入挖掘與研究。
作為SDN網(wǎng)絡運行的基礎,網(wǎng)絡更新問題一直受到相關研究者的廣泛關注[6]。為保證業(yè)務傳輸?shù)倪B續(xù)性,當網(wǎng)絡鏈路、節(jié)點、拓撲等狀態(tài)發(fā)生變化時(如節(jié)點故障、鏈路擁塞等),需要對網(wǎng)絡進行適應性調(diào)整,如改變傳輸路徑、調(diào)整鏈路負載等,通常稱為網(wǎng)絡更新。網(wǎng)絡更新問題是通信網(wǎng)絡的基礎性問題,更是SDN控制平面的核心問題,直接關系到網(wǎng)絡運行效率和業(yè)務通信質(zhì)量[7]。
目前SDN網(wǎng)絡更新問題的研究普遍基于拓撲相對穩(wěn)定、鏈路質(zhì)量相對可靠的有線網(wǎng)絡環(huán)境,針對多樣性業(yè)務傳輸下的網(wǎng)絡擁塞問題研究相應的網(wǎng)絡更新策略。對于航空集群,由于其OODA的閉環(huán)作戰(zhàn)需求,SDAN-AS的業(yè)務具有與SDN有線網(wǎng)絡具有相同的多樣性特點;但是航空集群成員移動速度較快、成員相對位置變化頻繁,且存在敵方干擾的情況,導致SDAN-AS的鏈路狀態(tài)高度不穩(wěn)定,從而加劇了鏈路擁塞和業(yè)務傳輸?shù)牟贿B續(xù),嚴重影響SDAN-AS的業(yè)務轉(zhuǎn)發(fā)效率。
針對上述問題,從解決SDAN-AS鏈路擁塞、提升業(yè)務轉(zhuǎn)發(fā)效率的角度,首先通過FLIP混合更新算法對各業(yè)務流的更新順序進行規(guī)范,得到表示更新順序的操作序列;在此基礎上,設計鏈路擁塞的感知算法,并在混合更新算法中加入鏈路擁塞的感知,對操作序列加以約束條件,進一步改進混合更新算法提出基于擁塞避免的網(wǎng)絡更新算法(congestion avoidance based algorithm of update, CA-AU),以增加鏈路感知能力,減少鏈路擁塞的發(fā)生,從而提高SDAN-AS的業(yè)務轉(zhuǎn)發(fā)效率及網(wǎng)絡更新可靠性。
1 相關理論與模型構建
1.1 理論介紹
現(xiàn)有針對SDN網(wǎng)絡的更新算法主要分為3類,分別為:次序更新[8]、兩階段提交更新[9]以及混合更新[10]。其中,次序更新通過計算交換機轉(zhuǎn)發(fā)規(guī)則的替換順序來保證網(wǎng)絡更新的準確和可靠,當網(wǎng)絡規(guī)模較小時該方法具有較高的可靠性且更新速度較快、效率較高;兩階段提交更新通過在交換機上同時保留業(yè)務流的新、舊轉(zhuǎn)發(fā)規(guī)則,并在網(wǎng)絡入口給業(yè)務流打標簽,決定業(yè)務流的轉(zhuǎn)發(fā)規(guī)則來保證網(wǎng)絡更新的準確和可靠。但研究發(fā)現(xiàn),當網(wǎng)絡規(guī)模較大、交換機數(shù)量較多時,使用次序更新方法可能無法保證網(wǎng)絡更新過程的準確和可靠;而當存在交換機的內(nèi)存不足以額外存儲一套新的轉(zhuǎn)發(fā)規(guī)則時,無法使用兩階段提交更新方法。可以看出,當航空集群規(guī)模較大時,次序更新方法不適用;當集群成員存在內(nèi)存不足的情況時,兩階段提交方法不適用。因此,本文后續(xù)基于混合更新方法,加入對鏈路擁塞的感知,提出適用于航空集群機載網(wǎng)絡的更新策略。下面對混合更新算法——FLIP(fast lightweight policy)進行介紹。
算法首先將更新問題分解至每一條業(yè)務流,并對每條業(yè)務流獨立計算各自的操作序列。算法以一個網(wǎng)絡更新問題作為輸入,具體內(nèi)容包括:網(wǎng)絡初始狀態(tài)(拓撲、節(jié)點和鏈路的相關信息)、最終狀態(tài)下的路由以及需要維護的給定策略。算法輸出為所有業(yè)務流子操作序列混合所得的操作序列。其中,后一個子序列中的任何操作需在前一個子序列中的所有操作完成后執(zhí)行。
算法首先提取各操作之間的順序來保證更新過程中的轉(zhuǎn)發(fā)正確性,不出現(xiàn)更新過程中的中間狀態(tài)無可匹配的下一跳轉(zhuǎn)發(fā)節(jié)點,或數(shù)據(jù)包在有限節(jié)點間相互轉(zhuǎn)發(fā)的情況。其次,提取保留給定策略的約束條件,以保證更新過程中不違背給定的轉(zhuǎn)發(fā)規(guī)則。當保留給定策略約束條件與部分轉(zhuǎn)發(fā)正確性約束條件之間存在矛盾時,需要求解線性規(guī)劃以確定一組更新開銷最低的更新操作序列。
1.2 場景及架構描述
圖1直觀地展示了SDAN-AS的基本架構。與SDN相同,SDAN-AS將整個網(wǎng)絡在邏輯上由南到北分割成3個平面,分別為數(shù)據(jù)平面、控制平面和應用平面[9]。其中,數(shù)據(jù)平面由負責數(shù)據(jù)存儲與轉(zhuǎn)發(fā)的網(wǎng)元設備組成(簡稱為數(shù)據(jù)轉(zhuǎn)發(fā)設備)。這些數(shù)據(jù)轉(zhuǎn)發(fā)設備的通信系統(tǒng)通常搭載于航空集群成員中的中小型空中平臺(例如戰(zhàn)斗機、偵察機、電子干擾機、無人機等)之上。控制平面由負責邏輯集中地掌控網(wǎng)絡全局的網(wǎng)絡控制器組成。這些網(wǎng)絡控制器的通信系統(tǒng)通常搭載于航空集群成員中的大型空中平臺(例如預警機和指通機)之上[11]。通過南向接口,網(wǎng)絡控制器可以及時地掌握全局網(wǎng)絡視圖并向底層的數(shù)據(jù)轉(zhuǎn)發(fā)設備下發(fā)相關指令消息。通過北向接口,網(wǎng)絡控制器能夠向上層實時地反饋底層網(wǎng)絡狀態(tài)信息,以便網(wǎng)絡應用根據(jù)網(wǎng)絡的實際情況進行動態(tài)調(diào)整,達到全網(wǎng)最優(yōu)。應用平面由網(wǎng)絡需要的、用戶定義的各種業(yè)務與應用組成[12]。
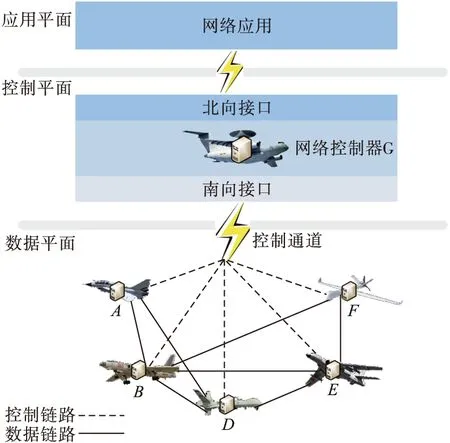
圖1 SDAN-AS網(wǎng)絡架構
為了更加直觀地對SDAN-AS網(wǎng)絡更新問題進行描述,本文將SDAN-AS網(wǎng)絡建模為一個無向圖Ω=(V,E,C),其中V={v1,v2,…,vM}表示網(wǎng)絡拓撲內(nèi)的全體節(jié)點的集合,M表示拓撲內(nèi)節(jié)點的數(shù)量。E={(vs,vd)|vs,vd∈V}表示網(wǎng)絡拓撲中鏈路的集合;C表示全體控制器集合,其構成SDAN-AS網(wǎng)絡的控制平面。顯然有C?V。接下來針對SDAN-AS網(wǎng)絡更新中的相關變量進行定義:W={w1,w2,…,wm}表示當前網(wǎng)絡更新過程中的待更新節(jié)點集合,顯然有W?V,m表示待更新節(jié)點數(shù)量;Λ={f1,f2,…,fn}表示待更新業(yè)務流集合,n表示待更新業(yè)務流數(shù)量。
2 基于擁塞避免的SDAN-AS自適應更新策略
2.1 總體策略
圖2為策略流程,包括更新問題收集階段(上半部分)和更新操作約束求解階段(下半部分)。
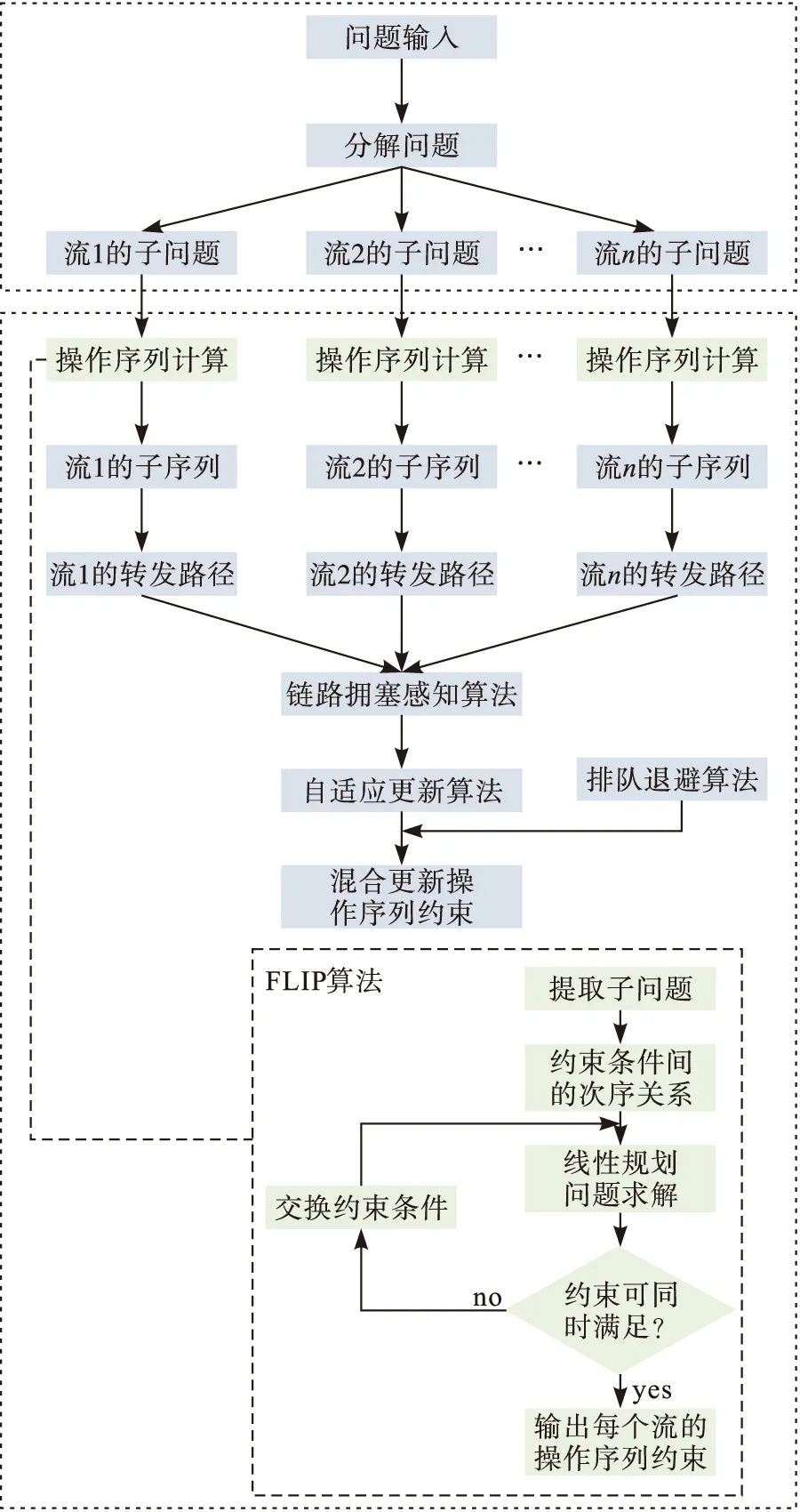
圖2 基于擁塞避免的SDAN-AS自適應更新策略流程圖
其中,更新問題收集階段實現(xiàn)了SDAN-AS當前網(wǎng)絡狀態(tài)的采集以及更新問題的初步解析。具體包括①當前網(wǎng)絡狀態(tài)信息的采集。SDAN-AS網(wǎng)絡控制器對當前網(wǎng)絡狀態(tài)信息進行采集,采集的信息包括:網(wǎng)絡拓撲、節(jié)點和鏈路的相關信息(包括節(jié)點間鏈路的鏈路容量、網(wǎng)絡中處于傳輸狀態(tài)的業(yè)務流的優(yōu)先級以及占用的鏈路容量等)。②業(yè)務流轉(zhuǎn)發(fā)路徑的采集。控制器通過北向接口,從應用平面獲取高層次網(wǎng)絡控制邏輯以及網(wǎng)絡管控需求,包括網(wǎng)絡更新完成后需實現(xiàn)的業(yè)務流的轉(zhuǎn)發(fā)路徑以及更新過程中需保留的給定策略。
更新操作序列求解階段生成網(wǎng)絡更新操作序列,實現(xiàn)SDAN-AS網(wǎng)絡數(shù)據(jù)轉(zhuǎn)發(fā)策略的更新,并保證更新過程中的一致性。該階段包括:
1)網(wǎng)絡更新問題的分解。根據(jù)更新問題收集階段輸入的網(wǎng)絡初始轉(zhuǎn)發(fā)策略、規(guī)劃的轉(zhuǎn)發(fā)策略、保留的給定策略以及預測的鏈路狀態(tài),提取出每條業(yè)務流需要保留的轉(zhuǎn)發(fā)規(guī)則以及轉(zhuǎn)發(fā)正確性需求,作為FLIP算法的輸入。此外將鏈路狀態(tài)信息作為基于擁塞避免的SDAN-AS更新算法的輸入,具體算法細節(jié)將在2.2節(jié)闡述。
2)連接一致性與策略一致性約束條件計算。FLIP算法中的基本操作類型包括:①規(guī)則替換操作rep(s,f),在節(jié)點s上對業(yè)務流f執(zhí)行的以最終規(guī)則替換當前規(guī)則的操作;②標簽操作tag(s,f,θ),在節(jié)點s上對業(yè)務流f執(zhí)行對其所有數(shù)據(jù)包打上標簽θ的操作;③匹配操作match(s,f,θi,θf)。在節(jié)點s上執(zhí)行安裝初始和最終規(guī)則,并對業(yè)務流f中的新數(shù)據(jù)包打上標簽θf、舊數(shù)據(jù)包打上標簽θi的操作。當保證連接一致性與策略一致性的約束條件存在矛盾時,需迭代求解線性規(guī)劃問題:

(1)
該線性規(guī)劃問題的目標為尋找一組更新操作序列,使更新開銷最低。其中,constrains onrep(i,f)表示全體替換操作的次序約束,當該線性規(guī)劃問題無解時,通過標簽-匹配操作取代更新序列中部分節(jié)點替換操作,從而化解約束矛盾,最終計算得到該線性規(guī)劃問題最優(yōu)解更新序列作為算法輸出。
因此,根據(jù)網(wǎng)絡更新的連接一致性與策略一致性需求,基于FLIP算法分別計算每條業(yè)務流的更新操作序列。首先通過線性函數(shù)求解該條業(yè)務流的規(guī)則切換操作序列rep(s,f)。若該線性函數(shù)無實解,則通過基于兩階段提交機制的標簽-匹配操作tag(s,f,θ)-match(s,f,θi,θf),代替部分節(jié)點的rep(s,f)操作,生成新的操作序列。
3)容量一致性約束條件計算:基于FLIP計算得到的業(yè)務流操作序列,根據(jù)網(wǎng)絡更新的容量一致性需求,通過基于擁塞避免的自適應更新算法以及排隊退避算法對網(wǎng)絡更新的容量一致性約束進行計算,提取新的業(yè)務流更新操作次序約束。若現(xiàn)有更新操作無法避免更新過程中產(chǎn)生的擁塞,則進一步通過排隊退避算法,將部分低優(yōu)先級業(yè)務流加入擁塞鏈路前序節(jié)點的緩存隊列中,待高優(yōu)先級業(yè)務流完成更新后釋放緩存恢復轉(zhuǎn)發(fā)。
2.2 基于擁塞避免的SDAN-AS更新算法
2.2.1 SDAN-AS網(wǎng)絡更新?lián)砣兄?/p>

算法1 鏈路擁塞感知算法
輸入:F,VOL,CAP
輸出:C,Ψ
1)C=?
2)fori=1→ndo
4)endfor
5)forekinEdo
6)volek=0,Ψek=?,i=1
7)whileek∈Traceido
8)volek=volek+voli
9)Ψek=Ψek∪fi
10)i=i+1
11)endwhile
12)ifvolek>capek
13)C=C∪ek
14)endif
15)endfor
設計SDAN-AS網(wǎng)絡更新?lián)砣兄惴ㄈ缦隆K惴ㄝ斎氚ㄈw待更新業(yè)務流路徑集合F={Fi|1≤i≤n}、占用的鏈路容量VOL={voli|1≤i≤n}、當前網(wǎng)絡中全體鏈路的容量CAP={capek|ek∈E},其中E表示網(wǎng)絡中全體鏈路集合。算法輸出為潛在擁塞鏈路集合C以及各鏈路經(jīng)過的業(yè)務流集合Ψ。此外,Tracei表示業(yè)務流在更新過程中所有轉(zhuǎn)發(fā)路徑遍歷的鏈路集合。
算法1第1行對鏈路擁塞感知集合進行初始化;第2~4行計算得到全體業(yè)務流在更新過程中所遍歷的鏈路;第5~15行計算鏈路擁塞狀態(tài),其中第7~11行計算每條鏈路上可能經(jīng)過的業(yè)務流量,若超出該條鏈路的容量,該條鏈路在更新過程中可能出現(xiàn)擁塞情況,將被加入集合C,同時將該條鏈路上可能經(jīng)過的業(yè)務流加入集合Ψ中。
2.2.2 基于擁塞避免的自適應更新算法
根據(jù)總體更新策略,在獲取網(wǎng)絡更新過程中的鏈路擁塞狀態(tài)后,通過基于擁塞避免的自適應更新算法計算混合更新操作序列約束。

算法2 基于擁塞避免的自適應更新算法(CA-AU)
輸入:網(wǎng)絡更新流相關信息I=(PRI,SEQ,VOI,F)
擁塞狀態(tài)信息L=(C,Ψ,CAP)
輸出:混合更新操作序列約束集合Cons
1)Cons=?
3)forfiinΨekdo
5)m=j
6)else
7)continue
8)endif
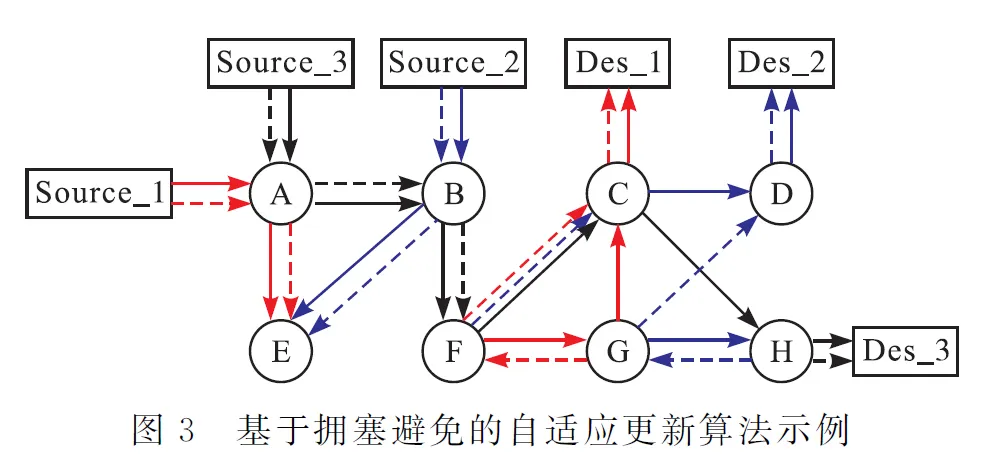
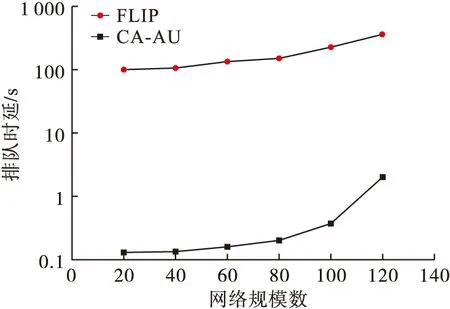
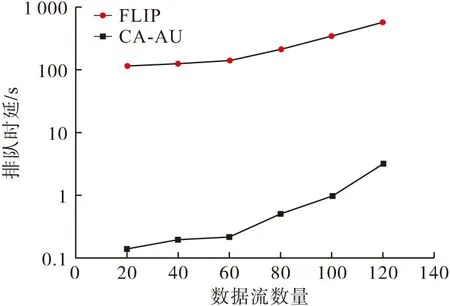
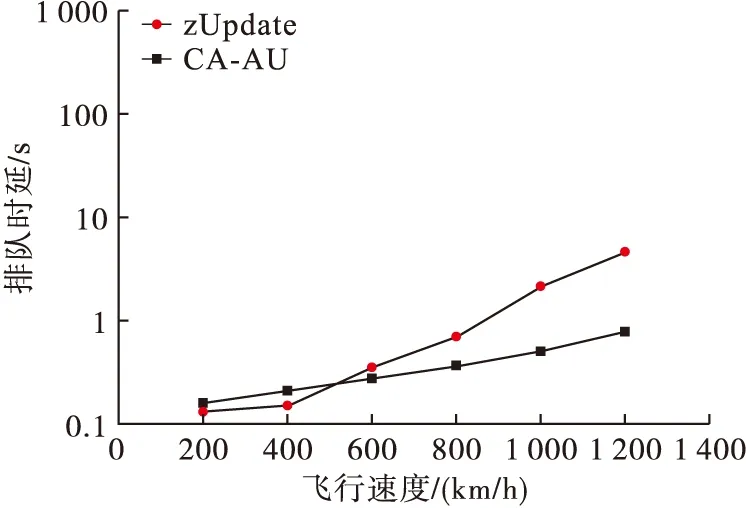
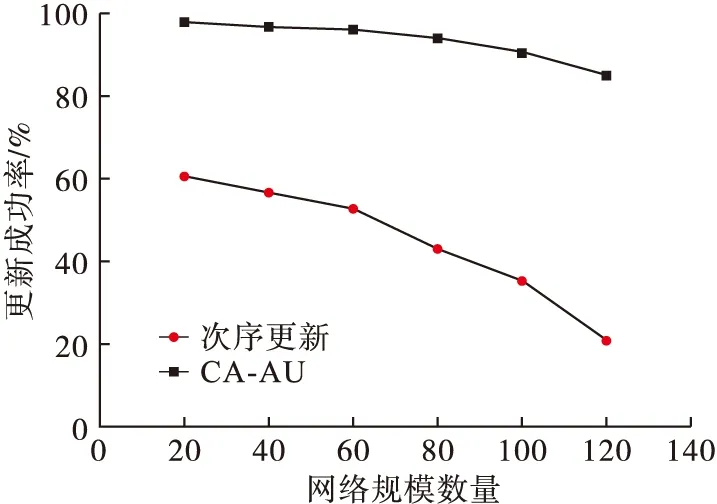
9)Ωi=?,Γi={fx∈Ψek|prix 10)forfjinΓido 12)Ωi=Ωi∪fj 14)endif 16)break 17)endif 18)endfor 20)QueueRetreat() 21)endif 22)endfor 算法2第1行首先對混合更新操作序列約束集合Cons進行初始化,之后通過第2~24行,逐鏈路添加混合更新操作序列約束。其中,第4~9行判斷流在更新后的轉(zhuǎn)發(fā)路徑是否經(jīng)過當前潛在的擁塞鏈路,若經(jīng)過則記錄造成擁塞的更新操作序號,否則,繼續(xù)分析更低一級優(yōu)先級的業(yè)務流更新操作子序列。第10~19行依次在優(yōu)先級低于fi的業(yè)務流更新操作子序列中搜索可釋放鏈路容量的更新操作,并添加進混合更新操作序列約束集合Cons中。若在Ψek中搜索完畢后,ek的鏈路容量仍無法保證無擁塞更新,此時調(diào)用排隊退避算法QueueRetreat(),對ek上的部分低處理優(yōu)先級業(yè)務流添加排隊退避以及恢復轉(zhuǎn)發(fā)更新操作約束。本文對排隊退避操作以及恢復轉(zhuǎn)發(fā)操作定義如下: 定義1 排隊等待操作queue(f,v,e):在節(jié)點v上將業(yè)務流f中通過鏈路e轉(zhuǎn)發(fā)的數(shù)據(jù)包加入緩存隊列中,此時業(yè)務流f暫停在鏈路e上的傳輸,但不影響流f在該節(jié)點上的更新。 定義2 恢復轉(zhuǎn)發(fā)操作recov(f,v,e):在節(jié)點v的緩存隊列中,將屬于業(yè)務流f的數(shù)據(jù)包通過鏈路e轉(zhuǎn)發(fā)。顯然,對于一條業(yè)務流f,存在約束:queue(f,v,e) 算法3QuecueRetreat( ) 輸入:網(wǎng)絡更新流相關信息I=(PRI,SEQ,VOI,F) 擁塞狀態(tài)信息L=(C,Ψ,CAP) fi的更新退避業(yè)務流集合Ω Ψek中優(yōu)先級低于fi的業(yè)務流集合Γi 輸出:排隊退避約束集合Cons_QRi 1)Cons_QRi=?,Φi=? 2)whileΓi≠? 6)endif 8)break 9)endif 10)endwhile 11)whileΦi≠? 12)l=1 16)l=l+1 17)endwhile 算法3輸入包括待更新流相關信息I=(PRI,SEQ,VOI,F);擁塞狀態(tài)信息L=(C,Ψ,CAP);流fi的更新退避業(yè)務流集合Ωi;Ψek中優(yōu)先級低于fi的業(yè)務流集合Γi。輸出為業(yè)務流fi的排隊退避約束集合Cons_ORi。算法中Φi表示流fi的排隊退避業(yè)務流集合,數(shù)組quei與reci分別保存了排隊退避操作與恢復轉(zhuǎn)發(fā)操作,若有j 圖3給出一個基于擁塞避免的自適應更新算法示例。圖中共有fi、f2與f33條待更新業(yè)務流,優(yōu)先級pri1 同理,對于潛在擁塞鏈路[F,C],為保證f1的無擁塞更新,在Ψ[F,C]={f1,f3}中搜索f3的更新操作子序列。不同的是,f3在更新前后均經(jīng)過了鏈路[F,C],無法通過更新退避約束實現(xiàn)f1的無擁塞更新。此時調(diào)用QueueRetreat()算法,并添加排隊退避約束條件queue(f3,F,[F,C]) 經(jīng)過鏈路擁塞感知算法可以計算得到潛在的擁塞鏈路為:C={[E,G],[F,C]},兩條鏈路上經(jīng)過的業(yè)務流集合分別為:Ψ[E,G]={f1,f2}和Ψ[F,C]={f1,f3},然后通過基于擁塞避免的自適應更新算法計算混合更新操作序列的約束'對于潛在擁塞鏈路[E,G],首先計算保證高優(yōu)先級業(yè)務流f1的無擁塞更新的約束條件,在Ψ[E,G]={f1,f2}中搜索低優(yōu)先級業(yè)務流f2的更新操作子序列。其中,操作可以在使f2的轉(zhuǎn)發(fā)路徑從鏈路[E,G]切 換為[E,H]從而釋放鏈路[E,G]上的容量,且此時滿足∑Ψ[E,G]vol-volf2≤capek,即在執(zhí)行操作rep(E,f2)后鏈路上不再產(chǎn)生擁塞。因此,添加混合更新操作序列約束rep(E,f2) 同理,對于潛在擁塞鏈路[F,C],為保證f1的無擁塞更新,在Ψ[F,C]={f1,f3}中搜索f3的更新操作子序列。不同的是,f3在更新前后均經(jīng)過了鏈路[F,C],無法通過更新退避約束實現(xiàn)f1的無擁塞更新。此時調(diào)用QueueRetreat()算法,并添加排隊退避約束條件queue(f3,F,[F,C]) 本節(jié)將CA-AU更新策略與幾種典型的SDN更新算法在SDAN-AS網(wǎng)絡環(huán)境下進行仿真分析,并對幾類關鍵性能指標進行比較,驗證CA-AU的性能。選取的對比更新算法包括次序更新算法、FLIP混合更新算法以及zUpdate更新算法[13]。選取的性能評價指標為更新平均排隊時延和平均更新成功率。仿真參數(shù)設置如表1所示,其中,網(wǎng)絡中各業(yè)務流所占用的鏈路容量服從均值為5,方差為1的正態(tài)分布;各業(yè)務流優(yōu)先級服從最小值為1,最大值為10的均勻分布。仿真實驗參照Rocketfuel拓撲[14],實驗過程中可對網(wǎng)絡中節(jié)點進行增減。當對指定自變量參數(shù)進行仿真分析時,其他自變量參數(shù)設置為平均值。 表1 仿真參數(shù) 圖4為一次成功的網(wǎng)絡更新過程中,各待更新業(yè)務流的平均排隊時延隨網(wǎng)絡規(guī)模變化的趨勢。 圖4 排隊時延與網(wǎng)絡規(guī)模關系 參與對比的更新策略分別為CA-AU策略與FLIP混合更新算法,通過對比可以發(fā)現(xiàn),隨網(wǎng)絡中節(jié)點數(shù)量的提升,F(xiàn)LIP與CA-AU的排隊時延均呈現(xiàn)指數(shù)式上升的趨勢。而FLIP的平均排隊時延始終遠高于CA-AU。在網(wǎng)絡規(guī)模為20個節(jié)點時,平均時延已接近100s,其原因在于FLIP算法雖然充分考慮了單條業(yè)務流的轉(zhuǎn)發(fā)正確性需求與給定策略需求,但沒有考慮鏈路擁塞對網(wǎng)絡更新的影響。擁塞現(xiàn)象易造成網(wǎng)絡需要通過多次序列計算以及指令下發(fā)過程才能最終成功完成更新;相比之下,CA-AU的更新平均時延顯著降低,隨網(wǎng)絡規(guī)模增至120個節(jié)點,其平均時延始終保持在10s以下。CA-AU的平均更新排隊時延主要來源于低優(yōu)先級業(yè)務流的主動排隊退避。 圖5為一次成功的網(wǎng)絡更新過程中,各待更新業(yè)務流的平均排隊時延隨待更新業(yè)務流變化的趨勢。在該組實驗中,網(wǎng)絡規(guī)模設置為70個節(jié)點。仿真結果表明,隨業(yè)務流的增長,各流平均更新排隊時延呈現(xiàn)更加急劇的指數(shù)增長,原因在于業(yè)務流數(shù)量的增長直接造成網(wǎng)絡中鏈路擁塞現(xiàn)象的加劇,從而導致FLIP算法執(zhí)行時,需要更多次的更新周期完成一次成功的網(wǎng)絡更新;而對于CA-AU算法,擁塞鏈路的增加也造成低優(yōu)先級業(yè)務流需要在更多的擁塞鏈路的前序節(jié)點上進行排隊退避。但排隊退避所引起的平均排隊時延相較于FLIP算法仍顯著降低。 圖5 排隊時延與業(yè)務流量關系 圖6為一次成功的網(wǎng)絡更新過程中,待更新業(yè)務流的平均排隊時延隨平均飛行速度之間的關系。為驗證CA-AU在SDAN-AS高度動態(tài)的網(wǎng)絡環(huán)境下的適應性,在該組實驗中選取了zUpdate無擁塞更新策略作為對比。zUpdate是一種數(shù)據(jù)中心網(wǎng)絡環(huán)境下的無擁塞更新方案,通過對比可以發(fā)現(xiàn),隨著飛行速度的提升,zUpdate與CA-AU的平均更新排隊時延均明顯上升,表明隨著網(wǎng)絡動態(tài)性的提升,zUpdate與CA-AU的適應性均有一定程度的下降。其中,zUpdate的平均排隊時延在飛行速度較低時低于CA-AU,這是因為zUpdate可提供無擁塞的更新方案,而CA-AU則需要對部分低優(yōu)先級的業(yè)務流進行主動的排隊退避。然而隨平均飛行速度的提升,zUpdate的平均排隊時延急劇上升,并在飛行速度達到500km/h時開始高于CA-AU。這是因為CA-AU策略通過鏈路擁塞感知,對潛在的擁塞鏈路進行了更新約束的計算,相比于適用于靜態(tài)網(wǎng)絡環(huán)境的zUpdate,在動態(tài)網(wǎng)絡環(huán)境下具有更高的容錯與適應性能。 圖6 排隊時延與飛行速度關系 圖7為網(wǎng)絡更新成功率隨網(wǎng)絡規(guī)模的變化趨勢,該組仿真實驗選取次序更新作為對照,在不同規(guī)模下的網(wǎng)絡中,采用相同的網(wǎng)絡拓撲各執(zhí)行100次重復實驗。可以發(fā)現(xiàn),隨網(wǎng)絡規(guī)模的提升,次序更新的更新成功率均呈指數(shù)式下降,隨網(wǎng)絡規(guī)模的提升,次序更新與CA-AU更新成功率的差距持續(xù)增大,當網(wǎng)絡規(guī)模達到120個節(jié)點時,更新成功率降至20%以下。而CA-AU的更新成功率雖也隨著網(wǎng)絡規(guī)模的提升而下降,但在網(wǎng)絡規(guī)模提升至120個節(jié)點的過程中始終保持在90%以上。該實驗結果表明,在鏈路狀態(tài)不穩(wěn)定的機載網(wǎng)絡環(huán)境下,基于混合更新的CA-AU相比于次序更新的可靠性有了大幅提升,同時也表明相比于次序更新,CA-AU具有更強的魯棒性,可在更加復雜的網(wǎng)絡環(huán)境下獲取理想的更新效率。 圖7 更新成功率與網(wǎng)絡規(guī)模關系 本文面向軟件定義航空集群機載網(wǎng)絡的特殊復雜環(huán)境,研究適用于該網(wǎng)絡的更新策略。首先,基于混合更新算法計算理想鏈路狀態(tài)下業(yè)務流的更新操作序列,隨后針對每條業(yè)務流做擁塞鏈路的感知,并根據(jù)鏈路擁塞情況提出擁塞避免算法,基于業(yè)務流優(yōu)先級生成無擁塞的更新操作約束,以實現(xiàn)網(wǎng)絡更新的準確、可靠性。仿真結果表明,本文提出的更新策略在更新過程中降低排隊時延的同時,提高了更新的成功率。
3 仿真結果與分析

4 結語
猜你喜歡
教學考試(高考化學)(2021年2期)2021-05-30 06:15:52中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:42中學生數(shù)理化·高一版(2020年3期)2020-04-21 08:03:20中學生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10小學生作文(低年級適用)(2018年9期)2018-10-08 02:29:48中學生數(shù)理化·七年級數(shù)學人教版(2018年6期)2018-06-26 08:36:10數(shù)學大世界(2018年1期)2018-04-12 05:39:14幸福(2017年18期)2018-01-03 06:34:53中國衛(wèi)生(2016年8期)2016-11-12 13:26:50
