空氣制動預壓力對全自動駕駛地鐵列車精準停車影響的分析
2021-05-22 06:43:14廖紹輝姚風龍楊東韓宇
機械工程師 2021年5期
關鍵詞:系統
廖紹輝,姚風龍,楊東,韓宇
(中車長春軌道客車股份有限公司,長春130062)
0 引言
隨著國內城市軌道交通的發展,近幾年來,各大城市嘗試開通全自動駕駛列車。2016年底開通的香港南港島線是正式運營的GOA4(Grades of Automation 4)等級的全自動無人駕駛線路,隨后2017年開通的北京燕房線及2020年底開通的成都軌道交通9號線等也是按照全自動駕駛設計運營。為了提高運營效率,對全自動駕駛列車停車精準度提出了更高的要求。雖然列車通常設置對標不準、自動調整等功能,但是一次性對標成功對運營效率的提高是顯而易見的。而地鐵列車最后的停車階段,通常是由電制動和空氣制動混合完成,由于在電制動退出空氣制動力接管時,很難按照理論的電-空制動力曲線進行精確的轉換。空氣制動接管時有一定的延時性,最終影響精準停車。本文對提前施加空氣制動預壓力對停車精度的影響進行分析研究,得出了良好的匹配關系,最終實現列車的精確停車。
1 全自動對標模式原理
在全自動駕駛模式(FAM)下,信號系統根據列車的實施速度、加減速度曲線及列車位置,自動輸出動態的速度曲線,并控制列車運行速度。按列車的時間狀態動態調整牽引、制動指令及級位,實現列車的自動運行。列車網絡正常情況下,信號系統車載裝置(VOBC)將牽引制動指令及級位發送給列車網絡系統(TCMS),再由網絡系統將相應的指令及級位送牽引和制動系統,實時調整輸出的牽引和制動來控制車輛的精準對標,通常情況下對全自動駕駛對標精度要求為:列車客室車門中心線與站臺屏蔽門中心的距離在±300 mm以內。
2 列車制動分析
地鐵列車的制動模式分為空氣制動和電制動兩種:1)空氣制動需要通過安裝在轉向架的基礎制動裝置施加制動力,受制于制動缸充氣、排氣性能的影響,有一定的延遲性。在停車階段如果控制誤差較大,難以實現對停車精度的準確控制。2)電制動是通過控制電子元器件的通斷,利用電動機工況轉換實現制動效果,動態調節效果較好,更容易實現制動過程的精準控制[1]。
在列車低速停車階段,通常是由電制動和空氣制動的混合完成列車制動,最后由空氣制動停車,空氣制動接管電制動的及時性直接決定了對標的準確精度。
2.1 電空制動混合
在低速范圍內,停車制動階段被激活,制動控制單元(BCU)接收牽引控制單元(TCU)發送的停車制動指令(電制動衰減信號),控制空氣制動施加。通常情況下,當速度降到設定值(約8 km/h)時,牽引系統發出電制動衰減信號,經短暫延時(通常設置為400 ms),牽引系統控制電制動以設定的斜率(如1.0 m/s3)退出,如圖1所示的t0~t1時刻曲線。BCU接收到任何電制動衰減信號置位后,空氣制動按比例增加(如1.0 m/s3),如圖1所示的t1~t2時刻曲線。
正常情況下,當速度低于0.5 km/h時,且非牽引工況下,如果制動級位高于保持制動級位,BCU按照制動級位施加空氣制動;如果制動級位低于保持制動級位,BCU按照設計的保持制動級位施加空氣制動(考慮沖擊限制)。電空制動混合示意圖如圖1所示。
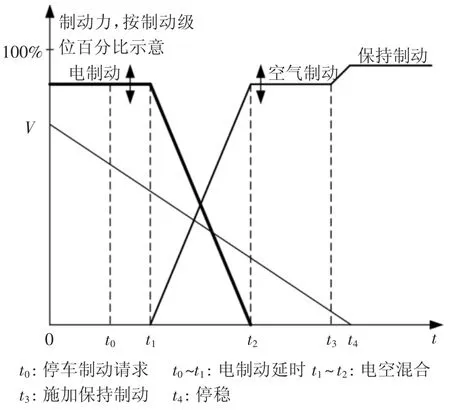
圖1 電空混合制動示意圖
2.2 影響列車對標的主要因素
影響列車對標的主要因素是停車階段制動系統的跟隨性和信號系統控車的準確性。在列車高速階段,電制動的響應速度因其是對電子元器件進行控制,響應速度通常比較快,可以較好地跟隨信號系統的控車策略;空氣制動系統因其特有的機械特性,跟隨性稍顯不足。
1)停車階段空氣制動系統的跟隨性。車輛在低速進入停車階段時,如果電空轉換匹配出現瑕疵,牽引控制單元輸出的電制動衰減信號存在延時不足,出現牽引控制單元電制動力減少時,空氣制動沒有做出及時的響應和補充電制動力的不足,導致列車獲得的總制動力減少,出現車輛沖標情況。王鵬[2]在廣州地鐵5號線對此做過相關研究,發現車輛自動模式(ATO)下,在乘客大流量時頻繁發生停車不準,原因是車輛低速工況下電空制動混合配合不好導致。路象群[3]在廣州地鐵A2型車項目發現牽引控制單元電制動力衰減與空氣制動上升期間約1 s,該過程在車輛自動模式(ATO)時是無法實現列車制動力調整的,電制動力的衰減和空氣制動力的上升的匹配關系顯得尤為重要,若匹配不當則會出現過制動或制動力不足的情況,導致列車停車不準。牟平[4]發現在哈爾濱地鐵1號線車輛電制動的延時退出對電空制動混合的影響,因空氣制動系統從收到制動指令到建立空氣制動力的時間需要400 ms左右,牽引控制單元電制動力的延遲衰減時間要與空氣制動系統制動力的建立時間匹配,才能實現電空轉換的平緩過渡,理想的電空轉換如圖1所示。
為了彌補空氣制動系統機械響應較慢的不足,在列車到達設定速度時,對制動缸施加預壓力,以縮短空氣制動的響應時間,提高其跟隨性能,盡可能實現電空制動的平滑過渡。
2)信號系統控車的準確性。信號系統控車的準確性主要取決于對列車位置、速度的準確獲取和控制算法的精準性。
本文主要分析電空制動混合過程中空氣制動系統的跟隨性對精準停車的影響。
3 案列分析
3.1 空氣制動預壓力分析
以某全自動駕駛地鐵項目為例,對空氣制動預壓力在列車精準停車方面影響進行分析。該項目是A型不銹鋼車項目,軸重不大于17 t,空氣制動采用輪盤制動型式。通常手動駕駛列車情況下,為了縮短空氣制動在電制動和空氣轉換階段的響應時間,空氣制動預壓力設定值在0.02~0.04 MPa之間。李潔等[5]為了縮短空氣制動控制單元(BCU)的響應時間,在制動工況時,當列車速度小于12 km/h時,設定BCU自動施加預壓力(0.035 MPa左右),響應時間的提升得到較好的結果。采用踏面制動單元的成都軌道交通2號線采用空氣制動預壓力0.02 MPa,實現了較好的列車自動控制模式(ATO)的對標性能[6]。測試案例在2012年設計階段停車控制階段空氣制動預壓力策略如下:在列車速度達到20 km/h時,空氣制動系統施加0.03 MPa的預壓力,以縮短系統的響應時間。
列車自動駕駛系統在測試階段,列車出現欠標的情況時有發生,在空載期間,發生欠標的次數逐漸增加。正式商業運營一周后,整條線路一次性停車欠標的次數從10次逐漸增加。據統計,每輛車都曾發生過一次性停車欠標現象。
經分析可能是施加預壓力后,閘片與制動盤之間產生了一定的制動力。經測試發現,空載工況下預壓力大約產生0.07 m/s2的減速度,大約占空載制動力的6%(約8 kN)。由于列車自動駕駛系統已經對預壓力產生的氣壓制動力進行了補償,因此初始設置的制動需求被認為是不準確的。在混合制動后,列車自動駕駛系統必須重新修正制動需求,導致列車出現對標不準的欠標現象。針對以上情況,首先對空氣制動系統相關參數進行測定。
3.2 空氣制動控制壓力精準度測定
在列車自動駕駛系統發出不同制動級位的情況,對空氣制動系統的性能進行測試,測試工況如下:制動級位4%,列車空載工況下制動力約6.8 kN;制動級位5%,制動控制單元需輸出約0.03 MPa的壓縮空氣,試驗結果表明引起0.07 m/s2的減速度,如上文所述;制動級位為0時,制動力也為0。在車輛速度超過20 km/h時,按如下制動級位順序進行測試:20%→30%→40%→30%,檢測制動缸壓力,每3 s改變一次制動級位需求。在車輛速度小于20 km/h時,施加20%制動級位,測量制動缸壓力。
測試結果如表1所示,測試結果完全符合空氣制動系統設計要求。

表1 控制壓力精度的測試結果 MPa
3.3 制動緩解的時間測試
前期測試軟件空氣制動系統施加和緩解按沖擊滿足0.8 m/s3設定。在新版測試軟件中,通過增大釋放沖擊率到1.0 m/s3,在空載特定工況下,測試結果顯示最大常用制動緩解的時間縮短約20%。在一定程度上,可以提高響應速度,但是影響較小。王亮等[7]在調整南寧軌道交通1號線停車精度時,曾采用過增大沖擊到1.2 m/s3的方案,對特定項目產生了積極的影響。經評估,案例項目未采取增大沖擊率進行調整的方案。
以上測試表明,空氣制動系統符合設計要求。但是在電空制動混合后,因空氣制動系統的緩解響應時間過長,列車自動駕駛系統發現制動力過大,但是已沒有足夠時間進行調整,導致欠標頻率的增加。
3.4 空氣制動系統預壓力值設置的修正
與列車自動駕駛系統的控制策略相協調,并通過現車測試,將空氣制動系統預壓力由0.030 MPa調整為0.021 MPa,保持之前設定的制動系統施加和緩解沖擊率為0.8 m/s3。正線現場空載測試獲得良好的停車精度,在全部多輪測試中,停車精度(客室車門中心線與站臺屏蔽門中心線距離)均在±250 mm以內,未出現停車不準現象,完全滿足全自動駕駛對停車精度的要求。
預壓力的實測結果如圖2所示,軟件設定值為0.021 MPa,現車實測值為0.014 MPa,符合空氣制動控制精度要求。
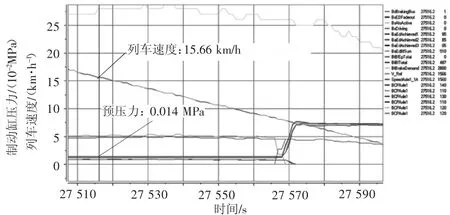
圖2 預壓力現車實測值
4 結語
1)通過對電空混合制動原理分析和現場試驗驗證,獲得空氣制動系統預壓力的合理設定值,為全自動駕駛列車的精準對標停車提供了有力的參考依據;2)合理設置預壓力,提高空氣制動系統的響應時間;減小或忽略因預壓力帶來的額外制動力對停車精度的影響;3)提出的合理空氣制動預壓力設定值,可以作為全自動駕駛列車空氣制動系統設置預壓力的參考值使用,縮短全自動無人駕駛車輛項目對標調試周期。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32