利用凱恩方程對氣源輔助式六自由度運動模擬平臺進行動力學建模
2021-05-22 06:43:30劉國軍
機械工程師 2021年5期
劉國軍
(湖南理工學院 機械學院,湖南 岳陽414006)
0 引言
由于具有承載能力高、精度高等優點,采用Gough-Stewart平臺結構的六自由度運動模擬平臺被廣泛用作多種運動模擬平臺[1]。在自行武器動態模擬試驗臺中,六自由度運動模擬平臺被用來復現自行武器系統行進時的運行姿態,為在實驗室內測試自行武器火控系統的性能提供實驗條件。傳統的重載六自由度運動模擬平臺常采用液壓運動系統,但液壓運動系統易污染、易泄漏、維護較復雜[2]。但隨著大功率直流電動機和矢量控制技術的發展,電動運動系統開始逐步替代液壓運動系統,它具有作動器走位精確、噪聲低、無污染、預防性及修正性的維護大大減小等特點[3-4]。
為了滿足重載情況需要,需通過增加額外驅動的方法來提高電動六自由度運動模擬平臺系統的負載能力,如:采用6+3總共9個電動缸驅動整個六自由度運動模擬平臺的冗余驅動并聯機器人[5];也可以增加3個氣缸來平衡負載和動平臺的重力,從而減小電動缸驅動電動機的耗能,作為全球領先的六自由度運動平臺系統的設計者和制造者,穆格公司的炮塔測試系統采用6個主動電動缸加3個被動氣動缸驅動的六自由度運動模擬平臺(即為氣源輔助式六自由度運動模擬平臺),最大動載荷可達到235.2 kN[6]。
國內外很多學者對六自由度運動模擬平臺的建模進行了研究,但對氣源輔助式六自由度運動模擬平臺研究的文獻很少。李曉成等[2]對氣源輔助式六自由度運動模擬平臺進行了優化,在對氣源輔助式六自由度運動模擬平臺進行動力學建模時,沒有詳細的過程,只是簡化模型。為了以后能對氣源輔助式六自由度運動模擬平臺進一步進行優化設計、響應特性等深入研究,需要建立它精確的動力學模型。為了便于使用計算機[7-9],本文將采用凱恩方程來建立氣源輔助式六自由度運動模擬平臺的動力學反解模型。
1 系統描述

圖1 氣源輔助式六自由度運動模擬平臺示意圖
氣源輔助式六自由度運動模擬平臺如圖1所示,Ai(i=1,2,3,4,5,6)為電動缸連接于動平臺上的鉸點中心,Bi(i=1,2,3,4,5,6)為電動缸連接于靜平臺上的虎克鉸中心。Ai(i=7,8,9)為氣缸連接于動平臺上的虎克鉸中心,Bi(i=7,8,9)為氣缸連接于靜平臺上的虎克鉸中心。為了適用一般情況,把控制點OL設置為與鉸圓圓心不重合的點。在動平臺上建立體坐標系{L}——坐標系原點為OL的直角坐標系OL-XLYLZL。在靜平臺上建立慣性坐標系{W}——坐標系原點為OW的直角坐標系OW-XWYWZW。
6個上鉸點Ai(i=1,2,3,4,5,6)和6個下鉸點Bi(i=1,2,3,4,5,6)連線分別為對稱六邊形(3條長邊和長邊分別對應相等)。3個氣缸的上鉸點Ai(i=7,8,9)和下鉸點Bi(i=7,8,9)連線也分別為等邊三角形。9個上鉸點Ai在同一個平面上。9個下鉸點Bi也在同一個平面上,如圖2所示。上鉸圓圓心為O1,半徑長rA,如圖2(a)所示。下鉸圓圓心為點O,半徑長rB,如圖2(b)所示。以O1和O為原點,分別建立坐標系{L1}與{W1}。坐標系{L1}(即O1-X1Y1Z1)即為把OL-XLYLZL平移到原點O1。坐標系{W1}(即OXYZ)即為把OW-XWYWZW平移到原點O。Z1軸垂直于上鉸面,X1軸為A6與A1連線的中線。上鉸點和下鉸點六邊形的短邊長度分別用dA和dB表示。氣缸在動平臺上的3個鉸點在同一個圓上,并構成一個等邊三角形,圓的半徑記為rPA,如圖2(a)所示。Z軸垂直于下鉸平面,X軸為B6與B1連線的中線。氣缸在靜平臺上的3個鉸點在同一個圓上,并構成一個等邊三角形,圓的半徑記為rPB,如圖2(b)所示。

圖2 鉸點位置示意圖
Lw和w1分別表示點O1在坐標系{L}和點O在坐標系{W}中的位置。規定:當矢量在慣性坐標系{W}中表示時不用標注;在其它坐標系中時,需要用左上標標注坐標系;用方括號“[]”加下標“×”表示兩個矢量叉乘,即有a×b= a×[]b。
根據前面的定義有:

其中:



2 位置、速度和加速度反解
已知動平臺的位姿,求解9個支路中電動缸(或液壓缸)與氣缸移動的長度、速度及加速度,分別稱為位置、速度和加速度反解[10]。
為了分析的方便,建立了第i個支路坐標示意圖(如圖3)。圖中:點C1i表示第i個支路中缸筒端的質心;點C2i表示第i個支路中活塞桿端的質心;點m1i表示第i個支路中缸筒端的質量;點m2i表示第i個支路中活塞桿端的質量;t表示矢量OOL;bi表示矢量OWBi;pi表示矢量OLAi;矢量BiAi用lini表示,其中li表示矢量BiAi的長度,ni表示矢量BiAi的方向;c表示動平臺與負載的綜合質心C到原點OL的矢量OLC;矢量OWC用rc表示;WRL表示坐標系{L}到{W}的旋轉矩陣,后面的依此類推;以點Bi為原點建立體坐標系{L1i}——右手直角坐標系Bi-XiYiZi,其中:Zi沿ni方向;Yi沿ni×z^(其中z^表示坐標系{W}中Z軸的單位矢量方向)方向。把坐標系{L1i}移動到以Ai點為原點建立坐標系{L2i}——Ai-XiYiZi。c1i、c2i分別表示上缸筒端質心和活塞桿端質心分別在{L1i}和{L2i}中的位置矢量,且是在坐標系{W}中表示的。

圖3 第i個支路坐標示意圖
2.1 位置分析
根據Ai的位置矢量關系得到

式中:

根據旋轉矩陣的方向余弦表示方法,可得到旋轉矩陣WRL1i為


缸筒端和活塞桿端質心在坐標系{W}中的位置矢量r1i、r2i分別為:

根據矢量關系可得到綜合質心C的位置矢量為

2.2 速度反解
把液壓缸、電動缸和氣缸的支路都當作UPS(U表示虎克鉸、P表示移動副、S表示球鉸)結構來分析。
式(9)右邊對時間求導,得到上鉸點Ai在坐標系{W}中的平動速度vAi為

式中:vAi表示上鉸點Ai在坐標系{W}中的平動速度;vP=t·表示動平臺上控制點OL在坐標系{W}中的平動速度;t·表示t對時間求導;ωP表示動平臺在坐標系{W}中的轉動角速度。
式(9)左邊對時間求導,也可得到上鉸點Ai在坐標系{W}中的平動速度vAi,為

式中:ωi表示支路i在坐標系{W}中的轉動角速度;l·i表示支路i的伸縮速度大小。

忽略液壓缸(電動缸)和氣缸繞自身軸線轉動的影響,即假設

式(19)兩邊左叉乘ni,可得到ωi為

分別對式(15)和式(16)求導,得到:

式中:v1i表示缸筒端質心的平移速度;v2i表示活塞桿端質心平移速度。
式(17)對時間求導,可得到綜合質心C的速度為

式中,vC表示綜合質心C在坐標系{W}中的平動速度。
把9個支路的伸縮速度大小與動平臺上控制點的速度關系合成為一個矩陣,有
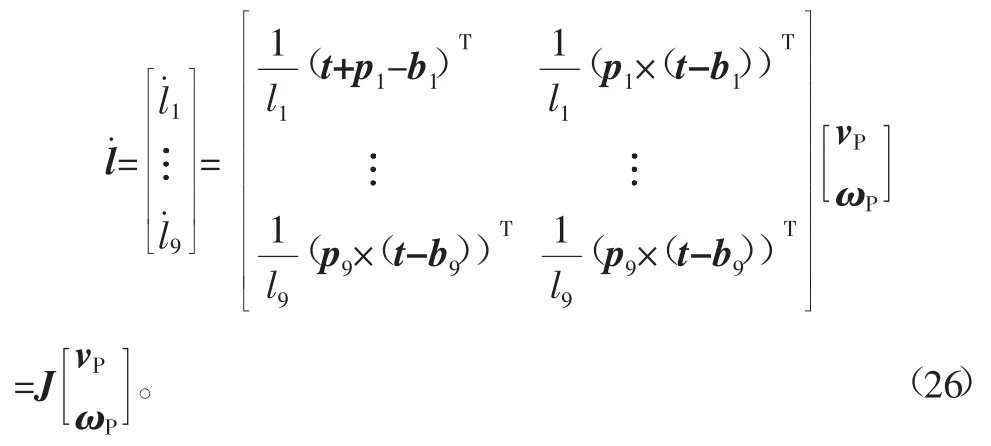
式中雅可比矩陣J為

2.3 加速度反解
式(26)對時間求導得到各個支路的伸縮加速度大小為


分別對式(23)和式(24)求導,得到:

式(25)對時間求導,可得到綜合質心C的加速度為

式(22)對時間求導,可得到支路i在坐標系{W}中的轉動角加速度為

式(19)左邊對時間求導,也可得到上鉸點Ai在坐標系{W}中的平動加速度為

3 動力學建模
3.1 雅可比矩陣
為了得到緊湊的解,要建立各個力作用點、慣性力(或力矩)作用點等的速度與動平臺上控制點速度之間的雅可比矩陣。
由式(18)得到

式中:

其中,I3表示3×3的單位矩陣。
由式(22)和式(35)得到

由式(23)和式(38)得到

由式(24)、式(26)和式(38)得到

把式(38)~式(40)結合起來得





雅可比矩陣JC為

3.2 利用凱恩方程建立動力學反解模型
凱恩方程的表達式如下[11]:




氣缸中驅動力大小是由活塞的作用面積和氣缸中氣體壓力的乘積,即為:式中:pPi表示第i個氣缸中氣體壓力的大小;AP表示氣缸中活塞的作用面積大小。
在恒溫過程中,封閉容器內氣體的壓力和容積的乘積為一個常值,即有[12]

式中:p為封閉容器內氣體的壓力大小;V為封閉容器內氣體的容積大小。
假設對于每個氣缸都單獨配備一個儲氣罐,則有

式中:p0表示動平臺在中位時,給儲氣罐加的初始壓力大小;V0表示儲氣罐的容積大小;l0i表示動平臺在中位時,第i個氣缸缸筒端活塞桿端面到氣缸缸筒底面的距離;l1i表示在當前位姿時,第i個氣缸缸筒端活塞桿端面到氣缸缸筒底面的距離。
由式(52)得到

又假設對于3個氣缸一起配備一個儲氣罐,則有

由式(54)得到

在運動模擬平臺運動過程中,氣缸的出力τPi是已知力。把6個廣義主動力和廣義慣性力分別合成為一個列向量,然后把式(26)、式(41)、式(42)和式(45)分別代入式(48)和式(49)中得到:

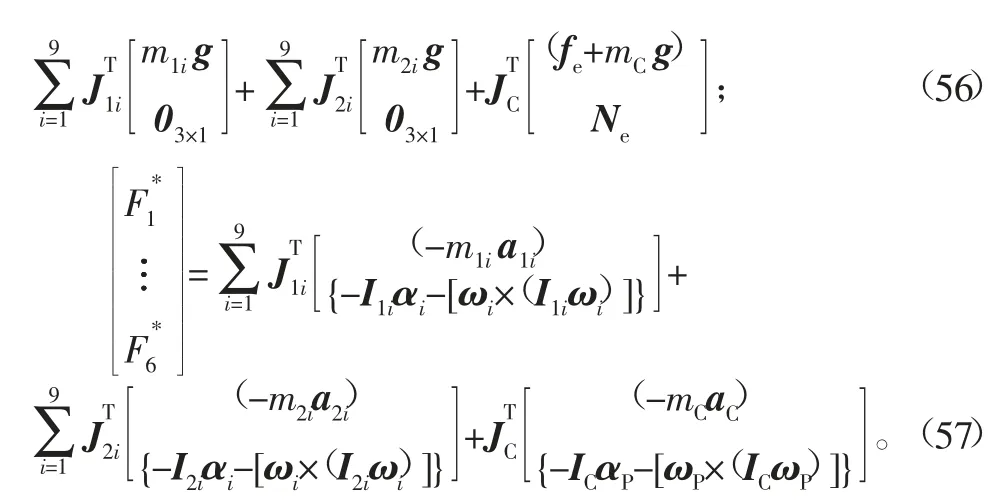
式中,03×1表示元素全為0的3維列向量。
由式(56)、式(57)和式(47)得到:

式中,06×1表示元素全為0的6維列向量。
當雅克比矩陣J(1:6,:)可逆時,由式(58)兩邊左乘(J(1:6,:)T)-1,得到6個電動缸的驅動力大小為

式中F為

當設計的初始階段,并不知道電動缸和氣缸的質量與慣量矩陣的值。且對于重載六自由度運動模擬平臺,由于負載太大,電動缸和氣缸的質量、重力與慣量矩陣對計算它們的驅動力大小影響較小,在初始階段時,可忽略不計。即此時得到6個電動缸的驅動力大小為

式中F′為

4 結論
本文考慮氣缸中氣體壓力的變化,分別對3個氣缸一起配備一個儲氣罐和各個氣缸單獨配備一個儲氣罐中氣缸出力進行了推導,然后利用凱恩方程對氣源輔助式六自由度運動模擬平臺建立了動力學模型,為進一步對氣源輔助式六自由度運動模擬平臺的優化和控制性能仿真等研究提供了詳細的動力學模型理論基礎。