平衡臂機器人機械手的設計
2021-05-19 09:15:28胡綠瑩陳志剛
機械管理開發(fā) 2021年3期
關鍵詞:設計
胡綠瑩, 陳志剛
(邵陽學院機械與能源工程學院, 湖南 邵陽 422000)
引言
目前工業(yè)中應用的機械手都已經(jīng)逐漸發(fā)展為工業(yè)機器人,大多由操作機(機械本體)、控制器、伺服驅動系統(tǒng)和檢測傳感裝置組成。它是一種復雜的機電一體化自動化生產(chǎn)設備。機器人不是簡單的體力勞動替代品,而是一種融合了人與機器優(yōu)勢的機電設備。機器人在勞動生活中有著非常重要的作用,它也是人類科技進步的表現(xiàn)。
1 機器人機械手的組成和分類
1.1 機器人機械手的組成
主要由機械手、操作機構和控制系統(tǒng)三部分組成:
1)機械手(1)手部。手柄配置在前端,手柄充滿了變速軸。機器人的構造模仿人類的手指,將未被切斷的虛構化合物和游離化合物分割。
2)傳送機構。能夠生成方向盤和分割方向盤。傳送手柄功能的是指針。需要正確把握指針的操作方法,才能使其加載到規(guī)定的位置。
3)動力源。軀體設置了方向盤和電源,各自提供了制度上的支持。
1.2 操作機構
控制機制分為四大類:液壓刺激、氣體刺激、電刺激和機械裝置。油壓刺激主要通過氣缸、閥門、油泵和燃料罐傳遞。控制機制多用氣壓汽缸、氣動馬達天然氣閥等。這些裝置非常方便、簡單、價格低廉。另外,氣壓系統(tǒng)容易生銹。
所有電氣化產(chǎn)品都使用三相異步電機,使用具有觸發(fā)裝置和大型齒輪減速系數(shù)降低的有效電力。在初期發(fā)展階段,部分設計人員將馬達裝置轉換成螺絲和螺母的感應聲音的組織。也有些設計者使用磁懸浮代替該組織,以實現(xiàn)高效率的操作。
1.3 控制系統(tǒng)
機器人操作員需要遵循控制作業(yè)指示,包括具體執(zhí)行時間、速度、追加及讀取速度等。機器人控制分為位置控制和連續(xù)智能控制兩種類型。控制系統(tǒng)可以根據(jù)要求移動,結構使用數(shù)值序列控制。必須先保存代碼,然后按照規(guī)定程序控制機器人操作員繼續(xù)作業(yè)。
2 機械手的設計方案
2.1 機械手液壓系統(tǒng)的工作原理
這個機械手的傳輸是油壓滾子,為了受到傳遞的力量會施加很大的壓力。推進力的電動泵吐出油泵的壓油,使壓力能源從電源向機械能變化。液壓油進入管道的汽缸,進行調整。由此,會誘發(fā)連接桿的運動,引起方向盤膨脹等,收縮、變動、急劇壓力等狀態(tài)的改變會造成機械出現(xiàn)某些變化。運動可能壓縮摩擦阻力時,機械手的一部分必須維持強度、壓力管理及活塞作業(yè)區(qū)域以相同的方式運動。方向盤為了解決油泵進入氣缸的油壓問題,采取了所有的動作。這種類型通過向水壓破碎裝置傳遞壓力,將水壓破碎轉換器的力傳遞給水壓破碎裝置。
這是相當于單一液壓裝置的液壓結構的機械手,由機械手、液壓系統(tǒng)、電源管理三部分構成。激發(fā)系統(tǒng)的油壓歸納見圖1。
2.2 液壓傳動機械手的特點
1)可以提高出口強度。此外,還可獲得20~70 kg/cm2的壓力。因此,在活塞區(qū)域,在相同條件下,液壓機器人可以釋放更大的空氣機器人。目前,液壓機械裝置的質量(即難以控制)為800 kg,氣壓驅動的機器人移動質量不到30 kg。
2)油壓滯后小,反應強烈,比空氣穩(wěn)定。氣壓傳輸容易達到高速,但空氣聯(lián)軸器低,攻擊道路上的油,不喜歡針點。
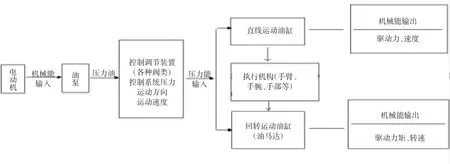
圖1 機械手液壓系統(tǒng)的工作原理
3)出口的強度和速度主要由油壓的壓力決定,有些氣缸下的速度和電流容量可以通過調節(jié)壓力和吸氣閥來輕松控制。
2.3 機器人機械手的動作順序
機器人工作流程見圖2。
這些運動由控制系統(tǒng)控制。控制系統(tǒng)向螺線管發(fā)送信號,按鈕控制激活動作。電子步進控制系統(tǒng)根據(jù)預定的延遲時間,使用步驟來啟動動作階段、接觸過程或中繼的各步驟的動作,螺線管閥的步驟“跳過”,由液壓系統(tǒng)自動控制。
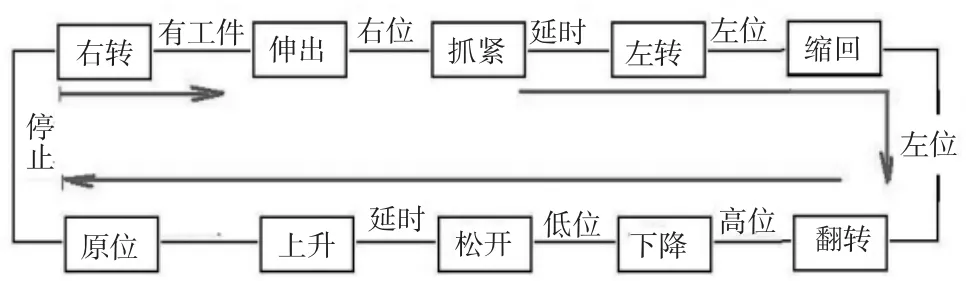
圖2 機器人機械手的動作順序
2.4 平衡臂機械手總體布局方案
通過圖3 顯示,我們了解了機械結構,考慮到物理材料的原因且是不需要移動的穩(wěn)定機器人,因此其基礎設計為嵌入水泥,取得平衡,使其穩(wěn)定。這個構造沒有伸縮汽缸。汽缸機構的十字路口被配置在同一列。如果這個地方被聚類化,不方便的話,兩個機器人會被安裝到揮桿上,并像離開旋轉油缸那樣揮棒。增加支持中心軸扭矩曲線。然后是機器人,壽命變短。因此,我們在供應欄的另一邊設計了伸縮汽缸油壓站和支撐板。如果機器人的揮桿中心離汽缸機構的Z 字形旋轉中心比較近,減輕軸的彎曲,可以通過機器人的收集和設置石油管道來改善。雖然設計了機器人,但空間內(nèi)的運動不會被水平范圍的存儲式汽缸捕捉,而是正確控制機構,并在空間內(nèi)持續(xù)移動。
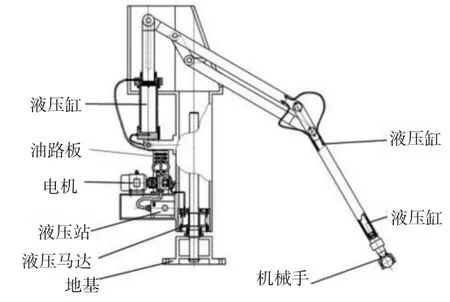
圖3 平衡臂機械手總體布局方案
3 結語
畢業(yè)設計為我們提供了一個很好的機會來了解工作設計的基本過程和方法以及設計理念。在設計中,經(jīng)過老師的指導,遇到的很多問題都得到了最好的解決方案。盡管本次設計只是一個簡單的機械手設計,但充分擴展和提升了旋轉、滑動的一些其他功能。在這些機器的設計中,理論知識和實踐的結合將鞏固和深化我們以前所學到的理論知識,為今后持續(xù)的研究設計奠定了堅實的理論和實踐基礎。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04