基于模糊神經(jīng)元PID 算法的注塑機(jī)注射速度控制算法研究
2021-05-19 10:40:56趙一鳴戚嘉輝胡燕海
寧波大學(xué)學(xué)報(理工版) 2021年3期
關(guān)鍵詞:效率
趙一鳴,王 壯,戚嘉輝,胡燕海
(寧波大學(xué) 機(jī)械工程與力學(xué)學(xué)院,浙江 寧波 315211)
在注射速度的經(jīng)典控制方面,浙江大學(xué)王喆[5]對液壓驅(qū)動螺桿移動速度的非線性特性進(jìn)行分析,根據(jù)油壓變化速率設(shè)計出注射速度的非線性分段數(shù)學(xué)模型,并構(gòu)建預(yù)測模型,實(shí)現(xiàn)了注射速度的閉環(huán)控制.在智能控制方面,模糊控制、迭代學(xué)習(xí)控制、神經(jīng)網(wǎng)絡(luò)控制等主流方法能很好地解決注射速度非線性?時變等問題.華南理工大學(xué)張智恒[6]設(shè)計了一種基于DSP 的液壓機(jī)全數(shù)字注塑速度控制器,利用低分辨率adc 提高注射速度精度.新加坡國立大學(xué)Tan等[7]針對注射速度提出一種新的復(fù)合控制方法,前饋控制采用迭代學(xué)習(xí)控制(ILC)算法來補(bǔ)償非線性與未知的擾動,PI 反饋控制用于注射速度穩(wěn)定控制,并推導(dǎo)了非線性數(shù)學(xué)模型,但是其仿真結(jié)果是基于其所構(gòu)建的一階數(shù)學(xué)模型,由于數(shù)學(xué)模型的局限性,致使此控制器無法運(yùn)用到實(shí)際生產(chǎn)中.浙江工業(yè)大學(xué)崔彩蓮等[8]運(yùn)用A 型ILC控制,首先制定連續(xù)的預(yù)期學(xué)習(xí)規(guī)則與離散的預(yù)期學(xué)習(xí)規(guī)則,分別設(shè)計了連續(xù)控制器與離散控制器;接著基于Gao 等[9]構(gòu)建的注射速度數(shù)學(xué)模型,分別對所設(shè)計的控制器進(jìn)行仿真研究,結(jié)果表明所設(shè)計控制器抗干擾能力與跟蹤能力皆優(yōu)于D 型、P 型ILC,但仿真數(shù)學(xué)模型為線性數(shù)學(xué)模型,難以用于實(shí)際生產(chǎn).
本文基于更貼合實(shí)際生產(chǎn)的四階數(shù)學(xué)模型描述注射速度,運(yùn)用模糊控制使具有自學(xué)能力的神經(jīng)元PID 算法中的各參數(shù)(比例效率、積分效率、微分效率、比例系數(shù))在線完成自調(diào)整,一方面能提升控制算法的效率,另一方面可以提升注射速度的穩(wěn)定性并減少響應(yīng)時間.根據(jù)所推導(dǎo)的非線性數(shù)學(xué)模型求出注射速度的傳遞函數(shù),將所設(shè)計的模糊神經(jīng)元PID 控制器運(yùn)用于注射速度的傳遞函數(shù),從而構(gòu)建出注射速度的新型傳遞函數(shù).
1 新型控制器的設(shè)計
1.1 神經(jīng)元PID 控制器的設(shè)計
神經(jīng)元模型本質(zhì)上為數(shù)學(xué)邏輯與作用函數(shù),采用不同的函數(shù)可設(shè)計不同功能特點(diǎn)的神經(jīng)元模型.通過分析注射速度的實(shí)際生產(chǎn)情況以及具有自學(xué)與自調(diào)整功能的神經(jīng)元,可以實(shí)現(xiàn)在線調(diào)整PID 控制器中相關(guān)參數(shù)的能力.神經(jīng)元PID 控制器一方面能更為準(zhǔn)確地控制注射速度,使其魯棒性得到提高,另一方面可以提高整個控制系統(tǒng)的適應(yīng)能力[10].
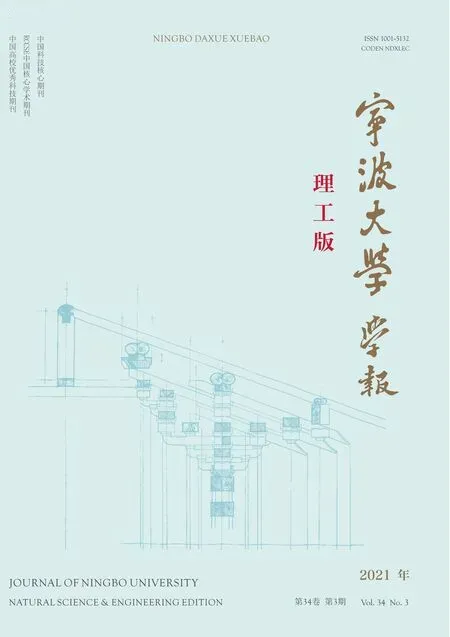
由于Hebb 學(xué)習(xí)法則可進(jìn)行無監(jiān)督學(xué)習(xí),并能根據(jù)訓(xùn)練集的情況提取其特性,本文利用Hebb 學(xué)習(xí)法則對神經(jīng)元的權(quán)值進(jìn)行在線調(diào)整.在控制注射速度的過程中,PID 控制中的變量是目標(biāo)值與實(shí)際值的差值e(k)及相鄰差值之間的差值e(k)-e(k-1),將權(quán)值算法修改后,可得到神經(jīng)元PID 控制器:
式中:u(k)為第k次實(shí)際反饋結(jié)果;K為比例系數(shù);X1(k)=e(k)-e(k-1),X2(k)=e(k),X3(k)=e(k)-2e(k-1)+e(k-2);W1(k)、W2(k)、W3(k)分別為比例權(quán)值系數(shù)、積分權(quán)值系數(shù)、微分權(quán)值系數(shù)(i=1,2,3);η1=ηP為比例效率,η2=ηI為積分效率,η3=ηD為微分效率;e(k)為期望結(jié)果與實(shí)際反饋結(jié)果的差.
然而,K值的大小將決定系統(tǒng)的響應(yīng)時間與穩(wěn)定性:K值過小將增加系統(tǒng)的響應(yīng)時間;K值過大將易產(chǎn)生超調(diào)量且致使系統(tǒng)穩(wěn)定性下降.W1(k)、W2(k)、W3(k)各權(quán)值的學(xué)習(xí)神經(jīng)元控制器中權(quán)值系數(shù)的數(shù)值由各權(quán)值的學(xué)習(xí)效率決定.注射速度控制系統(tǒng)開始調(diào)試之初,積分效率ηI與微分效率ηD應(yīng)選取較小值,比例效率ηP應(yīng)選取較大值.隨著注塑速度趨近目標(biāo)值,比例效率ηP逐漸減小,積分效率ηI與微分效率ηD逐漸增大;若注射速度出現(xiàn)超調(diào)量,應(yīng)逐漸減小比例效率ηP與積分效率ηI;若注射速度響應(yīng)時間過長,應(yīng)逐漸降低微分效率ηD,逐漸增加比例效率ηP與積分效率ηI[11].掌握了各參數(shù)對注射速度的影響,就為下一步構(gòu)建控制器奠定了基礎(chǔ).
通常情況下,根據(jù)實(shí)際生產(chǎn)經(jīng)驗(yàn)、仿真結(jié)果等大量數(shù)據(jù)確定神經(jīng)元PID 控制中的神經(jīng)元比例系數(shù)K、比例學(xué)習(xí)效率ηP、積分學(xué)習(xí)效率ηI、微分學(xué)習(xí)效率ηD等參數(shù),且確定后的參數(shù)在整個生產(chǎn)或者實(shí)驗(yàn)過程中是固定值,因此不能根據(jù)隨時會產(chǎn)生變動的參考值對注射速度進(jìn)行靈敏度高且精度高的控制[12].接下來引入模糊控制器,使其能實(shí)時調(diào)控K、ηP、ηI、ηD等參數(shù),達(dá)到高精度、高靈敏度的模糊神經(jīng)元PID 控制.
1.2 模糊控制器的設(shè)計
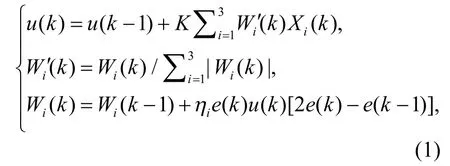
模糊控制對非線性系統(tǒng)有很好的控制效果.在數(shù)據(jù)庫與規(guī)則庫的基礎(chǔ)上,模糊控制可分為模糊化、模糊推理、去模糊化(清晰化)等3 個步驟,如圖1 所示.
基于上述要求,筆者采用灰色系統(tǒng)理論進(jìn)行預(yù)測系統(tǒng)算法設(shè)計。該理論以信息部分明確、部分不明確的灰色系統(tǒng)作為研究對象,采用灰關(guān)聯(lián)分析法對系統(tǒng)進(jìn)行分析,用數(shù)據(jù)處理的方式尋找數(shù)據(jù)間的規(guī)律,通過數(shù)據(jù)的灰色生成,可將雜亂無章的系統(tǒng)行為數(shù)據(jù)整理為隨機(jī)性弱化、規(guī)律性強(qiáng)化的新序列,進(jìn)而實(shí)現(xiàn)對系統(tǒng)未來行為的推測和預(yù)判[14-17]。
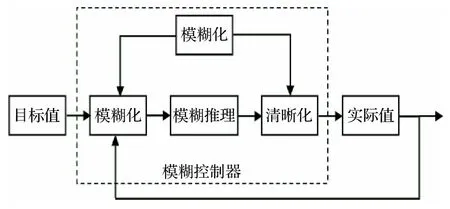
圖1 模糊控制流程
模糊控制器通過目標(biāo)注射速度與實(shí)際注射速度的差值E以及差值變化率EC一層層實(shí)時推理出神經(jīng)元比例系數(shù)K、比例學(xué)習(xí)效率ηP、積分學(xué)習(xí)效率ηI、微分學(xué)習(xí)效率ηD等參數(shù).定義{NB,NM,NS,ZO,PS,PM,PB}數(shù)據(jù)集為E與EC的子集,數(shù)據(jù)集中的元素分別代表負(fù)大、負(fù)中、負(fù)小、零值、正小、正中、正大.考慮實(shí)際生產(chǎn)中注射速度的數(shù)值范圍,選定差值E的取值區(qū)間為[-40,40],比例因子為0.3,模糊論域?yàn)閇-8,8];選定差值變化率EC的取值區(qū)間為[-7,7],模糊論域?yàn)閇-5,5].設(shè)定模糊數(shù)據(jù)集{Z,S,M,B}為實(shí)時輸出變量比例系數(shù)K、比例學(xué)習(xí)效率ηP、積分學(xué)習(xí)效率ηI、微分學(xué)習(xí)效率ηD的子集,數(shù)據(jù)集各元素分別代表從0 依次增大的數(shù)值.設(shè)定比例系數(shù)K的取值區(qū)間為[-1,40],模糊論域?yàn)閇0,40];設(shè)定比例學(xué)習(xí)效率ηP的取值區(qū)間為[0,500],模糊論域?yàn)閇-10,600];設(shè)定積分學(xué)習(xí)效率ηI的取值區(qū)間為[0,8],模糊論域?yàn)閇-2,10];設(shè)定微分學(xué)習(xí)效率ηD的取值區(qū)間[0,150],模糊論域?yàn)閇-10,140].設(shè)定三角函數(shù)同為模糊控制器的輸入函數(shù)與輸出函數(shù)的隸屬函數(shù),期望值與反饋值的差值E隸屬于所設(shè)定的曲線[13],如圖2 所示,分析注射速度與所設(shè)計控制器,去模糊化(清晰化)時運(yùn)用重心法[14].
圖2 差值的隸屬曲線
上文已經(jīng)設(shè)定各參數(shù)具體數(shù)值、取值范圍、論域以及去模糊化方法.神經(jīng)元比例系數(shù)K、比例學(xué)習(xí)效率ηP、積分學(xué)習(xí)效率ηI、微分學(xué)習(xí)效率ηD的模糊控制見表1.將模糊推理及去模糊化后所得的參數(shù)輸入神經(jīng)元PID 控制器中,然后對被控對象進(jìn)行控制.模糊神經(jīng)元PID 控制器控制注塑機(jī)注射速度的框圖如圖3 所示,其中r(k)為期望值,u(k)為輸入值,y(k)為輸出值.
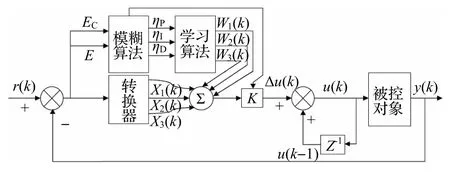
圖3 模糊神經(jīng)元PID 控制器框圖
2 注射速度系統(tǒng)數(shù)學(xué)模型的構(gòu)建
圖4 為所研究注塑機(jī)注射系統(tǒng)原理圖,注射系統(tǒng)包括伺服閥、壓力傳感器、液壓馬達(dá)、位移傳感器、旋轉(zhuǎn)編碼器、換向閥等,其中伺服閥芯的位置與方向直接決定注射螺桿的移動速度與移動方向,注射螺桿的移動速度又直接決定注射速度的大小,壓力傳感器獲取的壓力值與旋轉(zhuǎn)編碼器獲取的伺服電機(jī)轉(zhuǎn)速作為反饋值傳輸至伺服驅(qū)動器.經(jīng)過對注射原理的分析,本文選擇伺服閥芯位置作為速度控制系統(tǒng)的控制量[15].
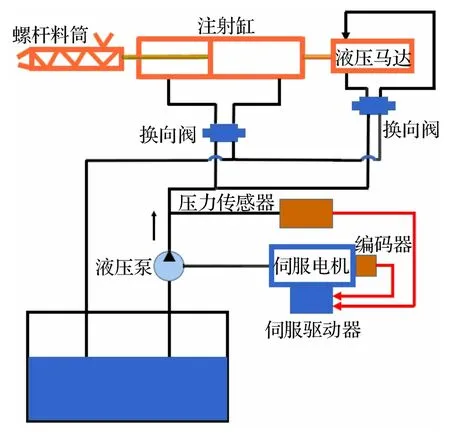
圖4 注塑機(jī)注射系統(tǒng)原理
2.1 伺服閥數(shù)學(xué)模型的構(gòu)建
在構(gòu)建伺服閥數(shù)學(xué)模型時,經(jīng)常采用不同的方法對伺服閥模型進(jìn)行辨識,例如脈沖響應(yīng)法?參數(shù)優(yōu)化法.本文伺服閥系統(tǒng)為伺服電機(jī)與內(nèi)嚙合齒輪泵動力系統(tǒng),此系統(tǒng)為二階系統(tǒng),電流作為輸入值,閥門流量作為輸出值,可得傳遞函數(shù):

式中:Q0為空載流量;為流量增益,其中Qn為額定流量,Ps為實(shí)際油壓值,Psn為額定壓降,Isn為額定電流;ωv為閥角頻率;?v為阻尼系數(shù).
2.2 注射缸數(shù)學(xué)模型的構(gòu)建
注射缸為液壓驅(qū)動,其工作原理如圖5 所示.根據(jù)牛頓第二定律,忽略其他非線性影響,可得注射缸運(yùn)動的微分方程:
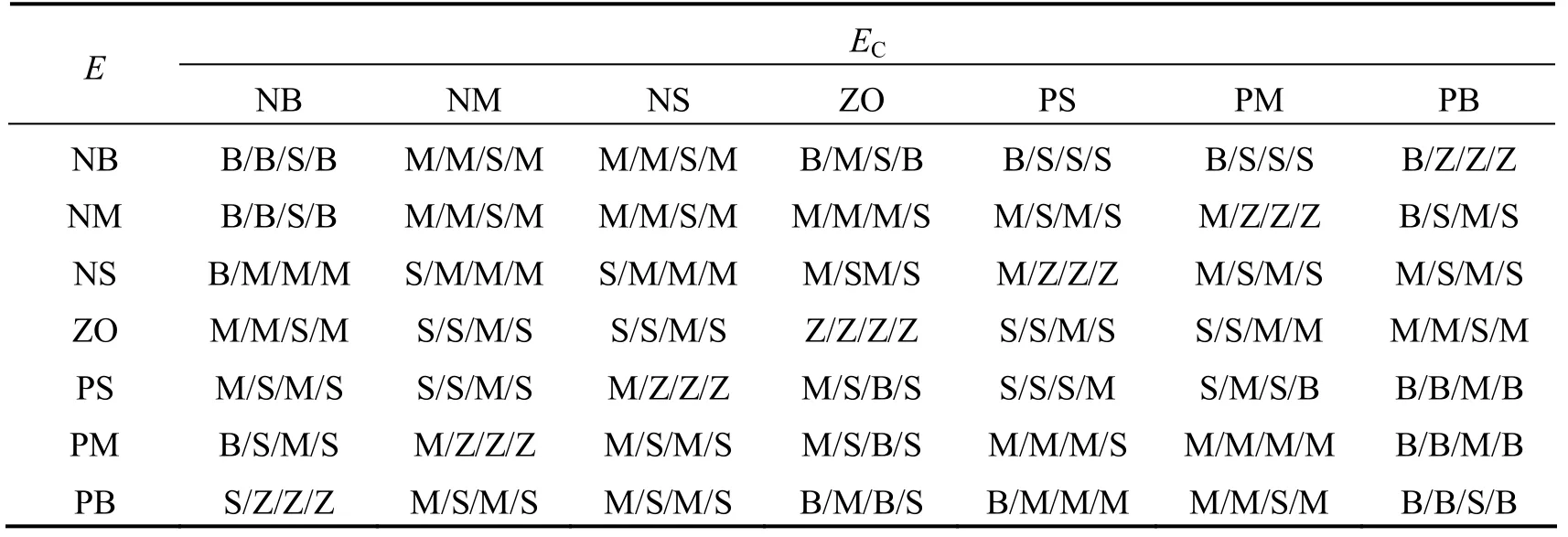
表1 K、ηP、ηI、ηD模糊控制表

式中:A為壓強(qiáng)的有效作用面積;P為驅(qū)動液壓缸運(yùn)動的內(nèi)部壓強(qiáng);v為注射活塞運(yùn)動速度;B為阻尼系數(shù);Fl為外部負(fù)載.
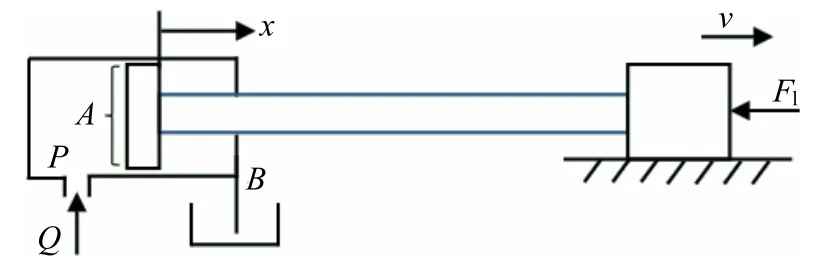
圖5 液壓缸工作原理
注入液體Q改變缸內(nèi)兩邊體積從而驅(qū)動注射桿運(yùn)動,根據(jù)液體總流量守恒,可得微分方程:

式中:Q為缸內(nèi)總流量;Cl為密封系數(shù);Va為液體實(shí)際體積;β為液體等效體積;為螺桿運(yùn)動時液體在缸內(nèi)的體積變化率.
將式(3)、(4)分別進(jìn)行拉氏變換后可得復(fù)數(shù)域中的函數(shù):
將式(5)代入式(6),可得:
若負(fù)載Fl為0,則液壓缸的傳遞函數(shù)為:
2.3 注射速度數(shù)學(xué)模型的構(gòu)建
根據(jù)已構(gòu)建的伺服閥傳遞函數(shù)與注射缸傳遞函數(shù)可得出注射速度的傳遞函數(shù):
采用階躍函數(shù)對注射速度系統(tǒng)傳遞函數(shù)中的參數(shù)進(jìn)行辨識,辨識結(jié)果如下:
3 仿真實(shí)驗(yàn)
運(yùn)用MATLAB Simulink 對采用模糊神經(jīng)元PID 控制器控制注射速度進(jìn)行仿真,根據(jù)上述理論分析、生產(chǎn)經(jīng)驗(yàn)、仿真分析經(jīng)驗(yàn)確定比例權(quán)值系數(shù)Kp=3.5、積分權(quán)值系數(shù)Ki=2、微分權(quán)值系數(shù)Kd=2為參數(shù)的初值,仿真時間為5 s,注射速度目標(biāo)值為15 mm·s-1.通過Simulink的仿真結(jié)果可知,由模糊神經(jīng)元PID控制器控制的系統(tǒng)參數(shù):響應(yīng)時間為0.08 s,超調(diào)量為1.21%,穩(wěn)態(tài)時間為0.2 s,3 s 時加入的干擾經(jīng)過0.15 s 的短暫振蕩后趨于平穩(wěn).為驗(yàn)證本次所設(shè)計的控制算法的優(yōu)越性,給出了傳統(tǒng)增量式PID 控制的Simulink仿真結(jié)果.設(shè)置同樣的仿真時間、采樣間隔、注射速度目標(biāo)值、干擾信號(幅值與施加時間),由傳統(tǒng)PID 控制器控制的系統(tǒng)參數(shù):響應(yīng)時間為0.15 s,超調(diào)量為26.6%,系統(tǒng)穩(wěn)態(tài)時間為1.4 s,在3 s 時加入的干擾經(jīng)過1.8 s 振蕩后趨于平穩(wěn).仿真對比結(jié)果如圖6 所示,由圖可知,針對注塑機(jī)注射速度的控制所設(shè)計的模糊神經(jīng)元PID 控制器性能遠(yuǎn)優(yōu)于傳統(tǒng)增量式PID 控制器.
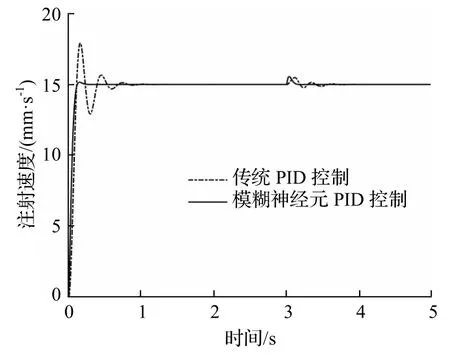
圖6 模糊神經(jīng)元PID 控制及傳統(tǒng)PID 控制對比結(jié)果
4 結(jié)論
通過仿真實(shí)驗(yàn)可知,相比于傳統(tǒng)增量式PID 控制器,本文針對注塑機(jī)注射速度系統(tǒng)所設(shè)計的模糊神經(jīng)元PID控制器具有較強(qiáng)的自適應(yīng)能力,且抗干擾能力強(qiáng)、超調(diào)量極小、響應(yīng)迅速、穩(wěn)態(tài)時間較短.故此模糊神經(jīng)元PID 控制器對于此系列注塑機(jī)注射速度的控制有著較為理想的控制效果.
猜你喜歡
瘋狂英語·初中天地(2021年5期)2021-07-21 02:24:28
甘肅教育(2020年14期)2020-09-11 07:57:42
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2020年5期)2020-06-02 09:19:08
商周刊(2017年9期)2017-08-22 02:57:49
遼寧經(jīng)濟(jì)(2017年6期)2017-07-12 09:27:16
中國衛(wèi)生(2016年9期)2016-11-12 13:27:54
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國洗滌用品工業(yè)(2015年7期)2015-02-28 19:02:38
電子設(shè)計工程(2015年12期)2015-02-27 12:06:10
中國衛(wèi)生(2014年11期)2014-11-12 13:11:32