六足仿生機器人步態規劃與控制系統設計*
2021-05-18 01:33:32
南方農機 2021年9期
關鍵詞:設計
(長春師范大學工程學院,吉林 長春 130032)
仿生六足機器人作為仿生機器人的典型代表,具有豐富的步態和肢體結構,它運動靈活、可靠性高,在排險、救援、服務等領域有著廣泛的應用前景。隨著火災和地震等自然災害頻發,救援工作也隨之成為重中之重,而在面對這些不規則的地形時,六足機器人就更具有優勢,可以無障礙穿過坑洼不平石子路面和較淺的積水路面,這一點是傳統輪式機器人無法比擬的。設計六足機器人可以適應各種惡劣的環境,并完成救援任務,并且具有較強的行動能力[1]。
1 六足機器人工作原理
足是昆蟲的運動器官。昆蟲有3 對足,分別在前胸、中胸和后胸各有一對,相應地稱為前足、中足和后足。每個足由基節、轉節、腿節、脛節、跗節和前跗節幾部分組成。在最末節的端部還長著兩個又硬又尖的爪,可以用它們來抓住物體。行走是以一側的前、后足與另一側的中足為一組。這樣就形成了一個三角形支架結構,當這三條腿放在地面并向后蹬時,另外三條腿即抬起向前準備替換。前足用爪固定物體后拉動蟲體向前,中足用來支持并舉起所屬一側的身體,后足則推動蟲體前進,同時使蟲體轉向。這種行走方式使昆蟲可以隨時隨地停止下來,因為重心總是落在三角支架之內。借鑒了這種自然界中昆蟲的運動原理來實現機器人的運動。機器人每一足都需要三個舵機,然后使用軟件控制舵機角度,讓機器人每次行走都能形成三角步態[2-3]。
2 機械結構設計
2.1 步行機構理論設計
步行機構對于設計機器人是極為重要的,設計時保證機械足正常行走的要求及實際三維建模進行選擇,并且根據實際情況進行了設計,如圖1 所示為六足機器人一條腿的機構原理圖。L 是機器人底板,A、B、C 是機械足的三個舵機,EF、FG 是機械足的大腿和小腿,它們將保證每條腿能夠最大限度地劃過以底盤關節為原點的三維空間。舵機A 使機械足前后劃動,舵機B 和C 保證機械足最大限度的抬高和張開,且在FG 踏于地面時,舵機B 和C將給予機器人底盤以最大的支持力。
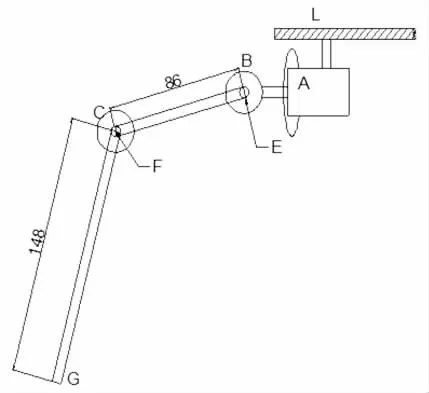
圖1 步行腿機構原理圖
2.2 步行腿機構設計參數
1)連桿尺寸EF=86mm,FG=148mm,舵機A 距地板高度LA=100mm。
2)估算機身高度設置為H=250mm,LCG=300mm,在正前方運行時,前腿和后腿之間不會發生相互干涉,為了保證兩足之間有足夠的距離,則兩伸出臂的距離為350mm。
3)電機軸與連桿的動力輸入軸能夠緊密配合。在材料的選擇上,桿用的是5mm 的金屬板,金屬板寬度均是8mm,這樣可以盡量減輕機構的重量。舵機輸出軸配合孔采用線切割加工,可以保證緊密配合。
2.3 步行腿機構系統統合
六足機器人兩側的步行腿系統均相同,行走時一側一條腿與另一側的前后兩條腿運動步態一致,每次均有三條腿同時著地,構成三角形結構,穩定機身。該六足機器人通過曲柄搖桿機構將電機驅動力轉換為步行腿向上的擺動,在小腿上安裝有壓力傳感器,并在小腿上安裝有舵機,舵機接受壓力傳感器傳來的信號,驅動舵機工作,使小腿開始擺動,實現機器人前行。
3 步態規劃設計
六足機器人是對六足昆蟲運動形態的觀察,結合機器人技術創造出的多足式仿生機器人。六足機器人有良好的地形適應力,其立足點離散與地面接觸面積較小,可以在不同的地形都選擇出最好的支撐點,由于其足的特點,其機身軌跡可與足軌跡解耦,所以在崎嶇的地形下可以保證機身的相對平穩。
“目前,大部分六足機器人采用了仿昆蟲的結構,6 條腿分布在身體的兩側,身體左側的前、后足及右側的中足為一組,右側的前、后足和左側的中足為另一組,分別組成兩個三角形支架,依靠大腿前后劃動實現支撐和擺動過程”[4]。如圖2 是六足仿生機器人的仿真步態。
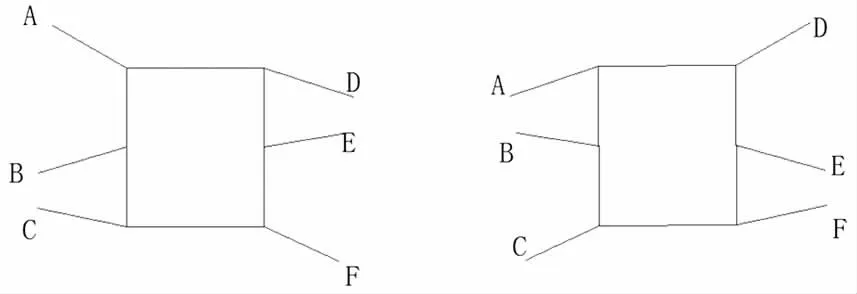
圖2 六足仿生機器人仿真步態
在設計機器人步態時,通過對三角步態的分析,以及對大多數六足昆蟲實際行走的過障礙分析,發現如需完成三角步態,必須每一條腿連接軀干處需要兩個舵機,一個控制足的轉動,一個控制足的起伏,在連接支撐部分處,只需一個舵機,就可以完成下半部分足的起伏。故,機器人每一足都需要三個舵機,然后使用軟件控制舵機角度,讓機器人每次行走都能形成三角步態,在調整出一次步態之后就可以通過循環指令得出多次行走的步態。
4 六足機器人功能執行
4.1 總體設計方案
六足機器人機械結構設計上擬采用18 個20kg 金屬舵機為動力源,通過激光雕刻機雕刻亞克力板制成的板料為肢體。總體設計上以兩塊亞克力板為仿生機器人主體,控制器及電路安裝在中層位置,頂層設計安裝肢體以及放置物件的平臺及其他工具,以應對仿生機器人不同的用途。設計的主體亞克力板為長六邊形形狀,六個舵機通過螺栓連接固定在六個頂點上,模擬昆蟲的六足形狀。該舵機可實現0°~180°旋轉角,實現肢體的前后移動功能。另外六個舵機分別通過板料與第一個舵機實現連接固定,作為肢體的第二個關節,并連接板料作為第二節肢體,該舵機實現肢體的抬升功能。結構尺寸的設計上應該以昆蟲的步態分析規劃為原則,避免腿部機構的碰撞與磨損[5-8]。機器人控制系統原理圖如圖3 所示。
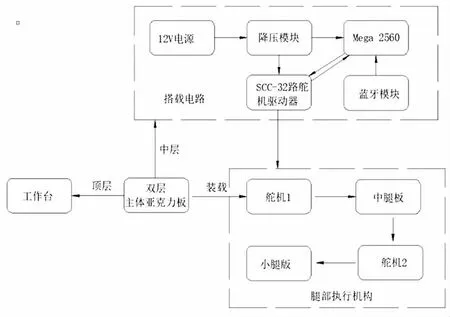
圖3 機器人控制系統原理圖
六足機器人電路設計以12V 電源供電,通過降壓模塊分配給各個模塊。擬通過Mega2560 主控板燒錄程序,通過算法實現機構的運動,SSC-32 路舵機驅動器與主控板實現雙向通信,將信號傳遞給各個舵機,執行相關動作對于運動狀態進行采集,反饋給主控板,并對狀態進行相應的調整與矯正,保證動作的正常執行。還可將六足機器人與HC-05 藍牙模塊連接,通過手機APP 發布指令完成相應動作。
4.2 控制系統設計
4.2.1 硬件設計
系統電路設計主要以Arduino Mega 2560 為主控板,Arduino 能通過不同的傳感器來感知環境,通過控制燈光、馬達和其他裝置來反饋,影響環境。它采用USB 接口的核心單片機,具有54 位輸入輸出口,使用于需要大量IO 接口的設計。
SSC-32 路舵機控制是專為機械手、多足機器人等多舵機使用而量身定做的多路舵機控制器。集成了USB 接口,可與多系統進行通信。舵機供電電壓為5.3V~7.2V。腿部執行機構采用兩個舵機串聯而成,分別控制腿部前后與升降運動。舵機是一個集成了直流電機、電機控制單元、減速箱等,并封裝成一個便于安裝的伺服單元,通過輸入特定的控制信號實現角度精準控制的電機系統。而SSC-32 路舵機控制板可以控制32 個模擬/數字舵機,引腳0~31 分別對應32 個舵機接口,其中絲印G 排對應GND,絲印VS2/VS1 對應舵機電源正極,絲印PULSE 對應舵機信號線。與Arduino 相連的時候,舵機控制板的TX 接至Arduino 的引腳0;RX 接至Arduino 的引腳1;GND 連接至Arduino 的GND。實現主控板與SSC-32 路舵機控制模塊的通信。
HC-05 是一種集成藍牙功能的PCBA 板,可用于無線通訊,通訊結構為UART3.3VTTL 電平,內置PCB 天線,工作電壓3V~3.6V。與Mega 2560 串行口連接,上電后利用手機自帶藍牙連接配對,通過用戶發送的指令控制主控板完成相關動作。
4.2.2 軟件設計
本設計電路通過編譯程序,燒錄文件于Arduino Mega 2560 中。程序調用舵機庫文件
4.2.3 系統調試
檢查各器件的額定電壓,調整降壓模塊輸出5V 電壓,將Mega2560、SSC-32 路舵機驅動、HC-05 藍牙模塊以及12 個舵機用杜邦線排布好并連接。通過上位機打開舵機位置監視窗口,調整舵機初始位置,使舵機處于中值位置,避免干涉。一切正常后,則進行軟件調試,通過USB線連接電腦,使用Arduino IDE 編譯軟件程序,檢查編譯結果,最后將程序燒錄進主控板。通過舵機指令的不同搭配,實現六足機器人前進、轉彎、翻越障礙等多個動作,最終實現整個系統的功能。
5 優化結構設計
針對目前市面上六足機器人具備的功能,本設計在該基礎上能夠實現搬運加持、清障、減震救援為一體,在實現相應功能的同時對機器人的各個部分進行優化調整。在結構上機器人的六足彈簧緩沖、底盤穩定,六肢根部為旋轉關節,靈活轉動,實現在救援過程或者其他實踐過程中的穩定工作。
機器人的運動軌跡通過遠程操控加紅外感應進行實時操作和軌跡的更正修改,以確保機器人行動的準確性和高效性。此外在機器人救援的過程中對于傷者的及時救助對生命的挽救起到了舉足輕重的作用,在機器人的背部專門設置一片區域用于放置急救藥物和食物,為受困人員采取的簡單急救和食物供給以便等待下一步救援。此外機器人在外形上近似于生物,盡可能實現對機器人的外觀最大的優化,同時為了能夠滿足機器人在較狹窄的空間活動自如,需將其各關節進行結構優化,使它的尺寸和布局更加合理。
6 結論
本項目基于仿生甲蟲的結構和功能,設計了六足減災救援仿生機器人的軀體和腿部機構。腿機構由六條腿組成,沿軀體中軸線兩邊對稱分布,每腿由三個旋轉關節組成的三自由度串聯機構。整個機器人有18 個舵機控制,使它適用于各種惡劣的環境中,并且能完成救援任務。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04