應急事件下面向社區出行的交叉口控制策略
2021-05-17 13:52:40劉博華楊文超
智能城市 2021年6期
劉博華 楊文超
(1.北方工業大學城市道路交通智能控制技術北京市重點實驗室,北京 100043;2.北京市公安局公安交通管理局,北京 100043)
災害引起的應急狀態下,部分區域和路段的交通需求量比非應急狀態下大,誘導交通量大,由此,引發的交通需求遠超過正常交通需求。
緩解交通延誤是確保應急情況下人員安全的關鍵,國內外學者針對此內容開展了各種研究。目前,大部分研究學者從車路協同和算法層面上對交叉口進行優化,如姚志洪等[1]建立了自適應信號配時優化模型,從車路協同的角度出發研究交叉口延誤的消散性,著重從控制端進行交叉口的控制。高萬晨等[2]利用Synchro軟件對信號周期進行研究,發現在渠化路徑和流量不變的情況下,隨著分配的信號周期增加,延誤和通行能力也會增加;還研究了在通行能力和信號周期不變時,渠化路徑的不同對延誤和通行能力的影響,趨化路徑和信號周期不變時,不同流量會影響通行能力,增加延誤。陳岳明等[3]在應急狀態下對路口的疏散進行建模和算法研究,主要對疏散路線和疏散路口的路網分配的問題進行了研究,以疏散時間最小化為目標進行建模和分析,通過在疏散中引入反饋的思想,利用實時的路網狀態信息對控制策略進行更新和調整。
鄭霞忠等[4]對交叉口的人流進行了研究,結合人群聚散的特點,通過建立疏散人群分流模型進行研究得出結論,相比最短路徑人群的疏散,在交叉口進行引導疏散效率會更高。陳星[5]在突發事件下,通過對機動車輛的疏散進行研究,提出了面向大規模區域疏散實時交通控制的建模,通過整合預測的交通流模型和實時自適應控制策略的模型,可提高區域疏散的性能。滕文[6]通過數據系統得到車輛數據進行交叉口的控制,對韋伯斯特配時法進行優化,模擬某個時段交叉口的車輛通行。
多數學者的研究均在已有的數據通過對信號配時和算法優化,縮短延誤和緩解路口的壓力。隨著硬件的提升,各種傳感器和數據比原有的現狀更加豐富,控制效果會更加精準,但對建立智能化的交通控制決策較為重要。本文針對問題和研究現狀,提出了基于數據融合的交通管控策略和基于多傳感器的交通控制策略。
1 研究對象
本文以石景山區濱河社區周邊路網為研究對象,通過對社區路網進行VISUM仿真試驗,對路口進行網格化,更加清晰明確路網的結構和分布,對區域內的交叉口群進行劃分和組合。結合實際路況和仿真路網的數據分析得出最優化的交通管控和交通控制策略,實際和理論相結合的研究可得到優化的策略。
本文選擇VISUM仿真分析,以實際路口為驗證,得出控制策略的優化部分。社區路網如圖1所示。
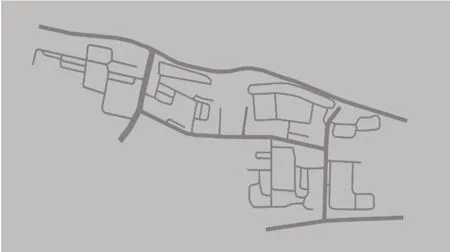
圖1 社區路網圖
在交叉口通過對交通信號配時方案的相位數、相位順序、各相位綠燈時間等進行控制,對交通的延誤情況進行調控。交通信號控制的相位、相序,一般采用離線優化控制方案的優化結果,并遵循相應原則,信號相位對應左右轉彎交通量及其專用車道的布置[7]。
常見相位配置如圖2所示。
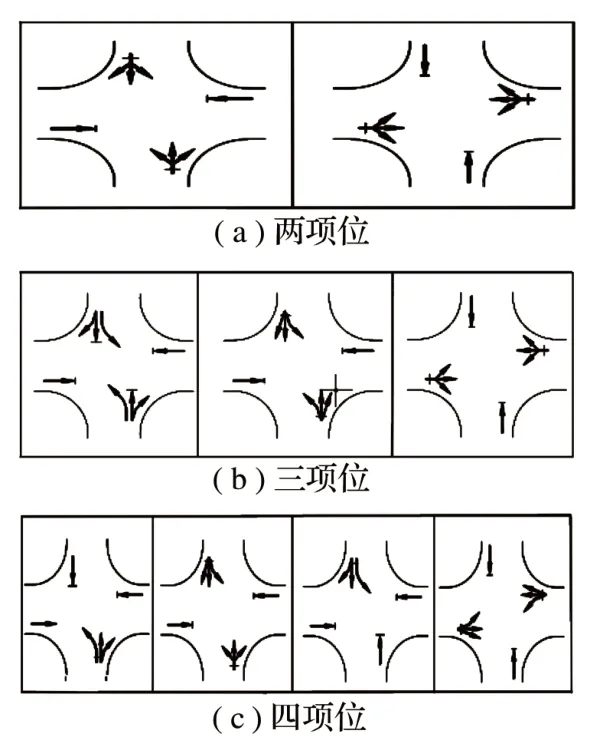
圖2 相位圖
2 多數據融合交通管控策略
多數據融合的交通管控制采用分級控制的控制思想,采用多種數據融合的思想在社區出行的起始段進行交通管控。在多融合數據下進行分級:最高優先級的分類是應急車輛如消防、公安、醫療;第二優先級容易對交通產生阻礙的車輛如貨車、大型客車;第三優先級是普通的車輛。
第一,通過在智能交管平臺上得到的人車出行數據進行分級;第二,根據從級別的高低依次對其進行交通管控和放行;第三,實時采集交通流量信息并及時修改策略;第四,增加反饋機制平衡道路的資源配比。
數據融合結構如圖3所示。
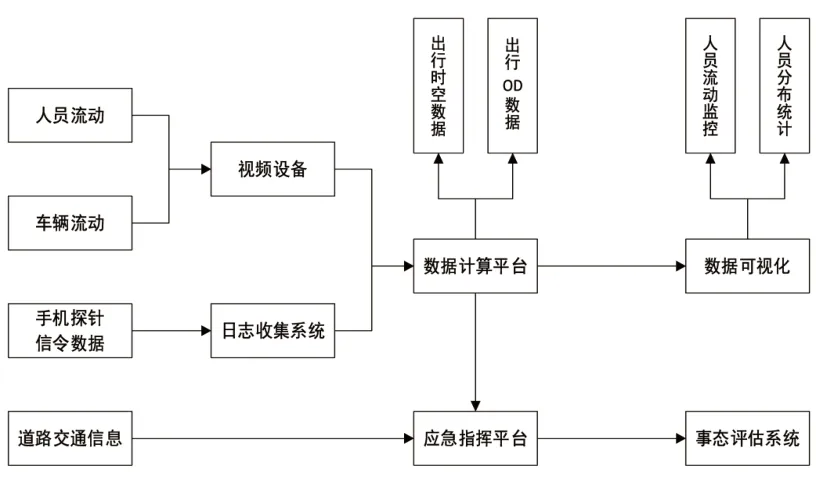
圖3 數據融合結構圖
目前數據采集的主要分為主動采集和被動采集。被動采集是傳統的人力進行采集,耗時慢、效率低、靈活性差;主動采集借助于視頻、紅外、勵磁等傳感器技術進行數據的采集。
交通管控對于數據的獲取較為重要,數據的正確和及時與否,對管控的策略起到指導性作用。基于此,提出多源數據融合的管控策略:從數據流程上建立數據處理模塊和社區人員流動可視化分析模塊兩個部分。數據處理平臺通過視頻攝像頭采集人臉和車輛識別數據,通過Flume采集社區住戶的手機探針信令數據。采集的所有數據經由KafKa傳遞給Storm集群進行數據過濾和緩存,再統計程序按照指標對數據進行統計,最終存儲到HBase數據庫中。社區人員流動可視化分析采用B/S架構,服務器端通過調用數據處理平臺的接口獲取統計數據,對數據進行處理,再返回到Web端進行可視化展示。
3 多傳感器融合交通控制策略
目前我國常用的交通控制通常借助紅綠燈的放行、可變車道等。應用最多的是通過控制信號燈的相位改變交通延誤,同時通過各種傳感器的反饋,作用于信號燈的相位改變,使交通通行達到最優。
為了方便分析,選取交叉路口延誤的時間為標準進行評價,如圖4所示。

圖4 區域交叉口路網關系示意圖
假設在時間段t內第i個交叉口進入社區的車輛數為Di(t)(i=1,2,…),交叉口群的總進入流量為:

設時段t內流出交叉口群的車輛總數為S(t)=Si(t)(i=1,2,…)[7]。因此,時段t內區域交叉口路網車輛數存在以下關系:

設區域交叉口內初始流量為N(0),則:

設路網中第i輛車的消耗時間為ti,路網中的總消耗時間:

設每輛車的損失時間的數學期望為T,式(3)可變換:

式(4)第一項和交通控制無關,第二項和區域交叉口外進入內的控制有關,與區域交叉口內的控制措施無關,因此,總消耗時間TS最小等價:

在合適的交通控制措施下,車輛越快離開交叉口區域,總體能消耗的時間越短。通過控制信號燈的相位,可以控制車輛的行駛時間,改變延誤的時長[7]。
利用交叉口的飽和度代替停車次數和延誤,根據式(5)對信號控制進行優化:
式中:ci——車道組i的通行能力;vi——車道組i的實際或預測需求流率[pcu/(h·lane)];si——車道組i的飽和流率(pcu/h/lane);gi——車道組i的有效綠燈時間(s);C——周期時間(s)。
數據的準確性、時效性對數據融合和信號燈的優化較為重要,豐富的數據可滿足復雜的交通路況。利用小區出入口人臉識別、車牌識別設備,獲取各小區OD數據,結合手機信令數據,通過數據多維度匹配分析和統計學方法。在應急狀態下針對不同場景和各異的天氣環境,為了得到正確和實時的數據,提出了多傳感器融合的控制策略。單一傳感器具有較大局限性,首先,采集的區域不全面,會存在盲點;其次,得到的數據單一,不足以為控制器和管理平臺提供精準的數據。在不同的天氣、時間段會對數據的精準度產生影響,如雨雪天氣聲音傳感器產生更多的噪聲,夜晚時間段會對視頻傳感器造成模糊的情況。
多傳感器融合的控制步驟:(1)在不同的天氣和場景下啟用不同的傳感器組合;(2)在一天中不同的時間段啟用不同的傳感器權重;(3)實時采集交通的車輛、行人、道路等信息并上傳到云臺;(4)通過控制信號燈改善車輛延誤和排隊長度。
4 實例驗證
本文通過對實際的路網進行部分驗證和分析,經實際路口檢測,驗證該控制策略可對交叉口起到積極作用,在起始點進行分流,緩解出、入口的壓力,改善路段上的人車排隊情況。
5 結語
本文采用多源數據融合的交通管控和多傳感器融合的交通控制的策略,將干線綠波協調控制方法應用到交通路網上,通過這種控制策略的協調控制方法與原本的控制策略進行對比,結果顯示本方法對交通延誤起到了積極的作用。
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
能源工程(2020年6期)2021-01-26 00:55:22
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26