地鐵隧道結構表面快速檢測技術應用研究
2021-05-17 13:52:36
智能城市 2021年6期
(青島地鐵集團有限公司運營分公司,山東青島 266000)
截至2019年底,我國40個城市開通城軌交通運營線路共208條,運營線路總長為6 736.2 km,地下線長4 366.5 km,占比64.8%。己投用的隧道結構,由于地質條件不利或施工、設計不合理等因素,隧道結構受到襯砌病害的影響。因此,開展地鐵隧道結構表面檢測,有利于及時發現病害,防止病害發展[1]。
1 地鐵隧道結構表面快速檢測技術的發展
當前我國城市軌道交通隧道結構檢查仍以人工靜態檢查為主,存在占用大量人工、檢查質量不高的問題。國內外針對隧道結構表面快速檢測技術開展了大量的研究和試驗,并已進行實踐使用。地鐵隧道結構表面快速檢測技術根據成像方式的不同可分為三維激光掃描、CCD成像掃描。
2 三維激光掃描
2.1 三維激光掃描系統基本原理
三維激光掃描系統以軌道小車為載體,由高精度三維激光掃描儀、GNSS/IMU/DMI組合定位設備、同步控制單位等設備組成[2]。軌道小車推行過程中激光射線與小車前進方向垂直,隨著不斷推行前進得到螺旋線狀的掃描點,同步技術將掃描點云與下車位置數據進行實時同步,實現隧道結構的三維重建[3]。使用軟件處理點云數據得到高清晰度灰度圖和斷面圖,通過分析灰度圖、斷面圖得到隧道結構滲漏水、裂縫和收斂等信息。
三維激光掃描系統主要技術指標如表1所示。
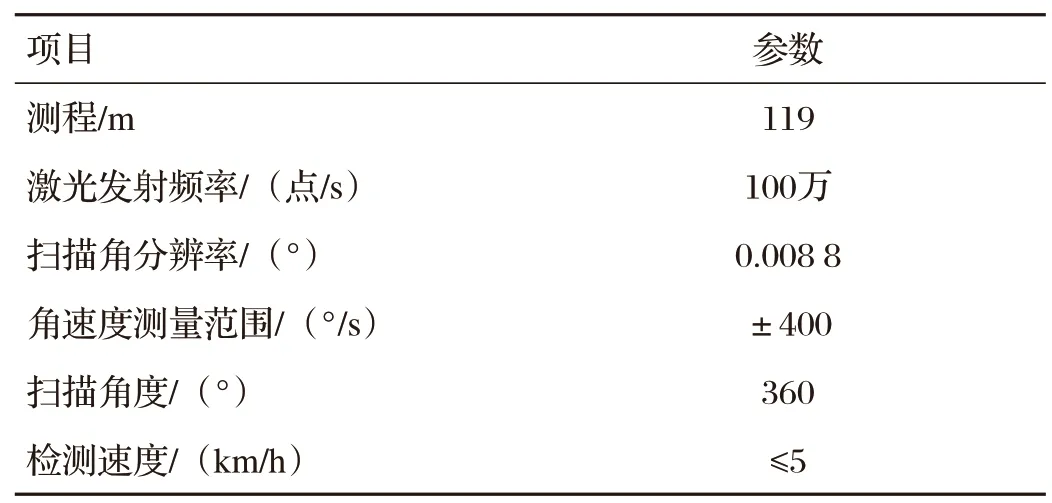
表1 三維激光掃描系統主要技術指標表
2.2 作業流程
2.2.1 外業數據采集
(1)硬件調試。包括高精度移動測量系統安裝調試、硬件設備的檢查、慣導校準等。
(2)采集參數設置。軌道小車行駛速度控制在5 km/h以內;掃描頻率為1 000 kHz;掃描儀轉速為200 r/s;編碼器轉1 000個脈沖。
(3)采集作業操作流程。①組裝掃描設備,設備電源上電,開機連接設備WiFi;②打開采集軟件,完成慣導的初始化,掃描儀旋轉穩定后(點云數據開始增長),人工平穩推進,直至到達采集目的地,設備停穩后,結束測站;③保證設備靜止,點擊“結束工程-靜止”,設備靜止5 min,完成后可進行設備掉頭、更改采集線路等操作,如果已經完成采集任務,先點擊“關閉設備”,等待2 min,再進行設備斷電操作。
2.2.2 內業數據處理
使用專用軟件對點云數據進行處理,得到高清晰度灰度圖和深度圖,通過對圖像分析得到隧道結構的滲漏水、裂縫、破損檢測、結構直徑分析和橫斷面分析等。
2.2.3 數據分析成果
(1)隧道高清晰度灰度圖成果。
隧道正射灰度影像將足夠密度的點云數據進行柵格化,以特定步長的柵格對點云進行劃分,并為每個柵格設置其行列值,將該柵格內點的強度平均值作為該柵格的灰度值,因此,柵格為對應圖像中的特定像素,實現點云到圖像的轉化。由于激光對混凝土與水的反射率不同,在灰度影像圖中滲漏水區域為明顯不規則黑色部分,在灰度圖中可識別滲漏水、結構裂縫[4]。
(2)隧道斷面圖成果。
利用點云數據對隧道斷面結構進行提取,并在特定里程處導出該處的斷面點云,得到該斷面的輪廓CAD圖,如圖1所示。
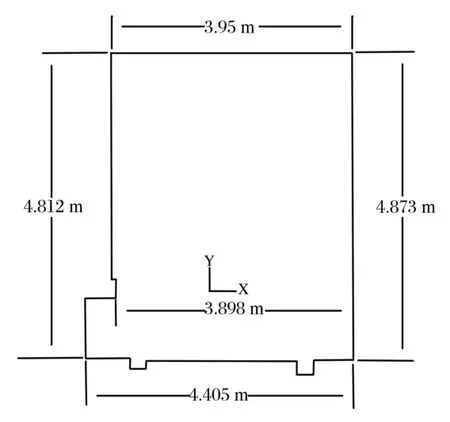
圖1 地鐵隧道結構斷面圖
3 CCD成像掃描
3.1 CCD成像掃描系統基本原理
CCD成像掃描系統通常以工程車為載體,由慣導及測距模塊、狀態指示模塊、存儲單元、定位模塊、高清成像模塊、高亮補光模塊等組成。在工程車行駛過程中不斷快速拍攝,得到隧道結構表面圖像,運用圖像處理、計算機深度學習等技術判斷隧道結構滲漏水、裂縫、破損情況。
CCD成像掃描系統性能指標如表2所示。
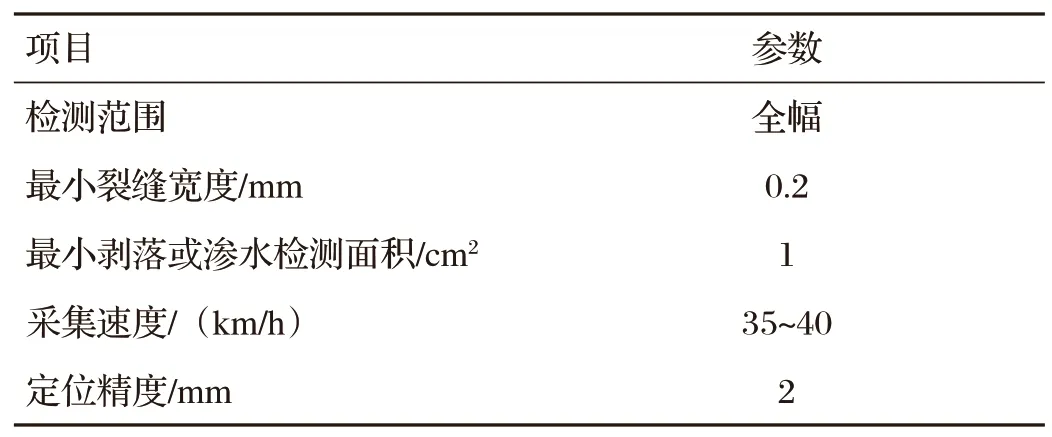
表2 CCD掃描系統主要技術指標表
3.2 作業流程
作業的主要流程分別為相機參數調整、相機標定、數據采集和數據檢查。
(1)根據隧道結構尺寸,擬定采集參數,進行相機對焦,使相機視場中央及邊角圖像清晰。
(2)相機標定分為尺寸標定和三維標定。
尺寸標定:將裂縫尺貼在標定板上,緊貼在兩側相機視場中央的隧道壁處,使用相機拍攝并記錄,拍攝結果保證0.2 mm刻度清晰可見。
三維標定:拍攝不同角度的標定板照片及標定板中方格清晰可見,標定人員手指沒有侵入方格。
(3)標定完成后即可正式采集,采集過程中車速控制在30~35 km/h,到達預先設定終點即可。
(4)采集完成后檢查數據,檢查相機采集幀數是否一致,并隨機從采集文件中抽取數張照片查看細節是否清晰。
3.3 數據分析成果
使用服務器對采集的隧道結構表面圖像進行智能分析,形成包含結構表面裂縫、滲漏水、剝落情況的報告。選取地鐵部分區間隧道系統生成的報告進行人工復檢,得出CCD成像掃描系統對裂縫、滲漏水的檢出率為100%,剝落檢出率為100%,但存在將結構修補誤判為剝落的情況。后續系統通過結構病害大數據學習,提升對結構病害的識別,以減少誤判。CCD成像掃描系統滲漏水病害檢測如圖2所示。
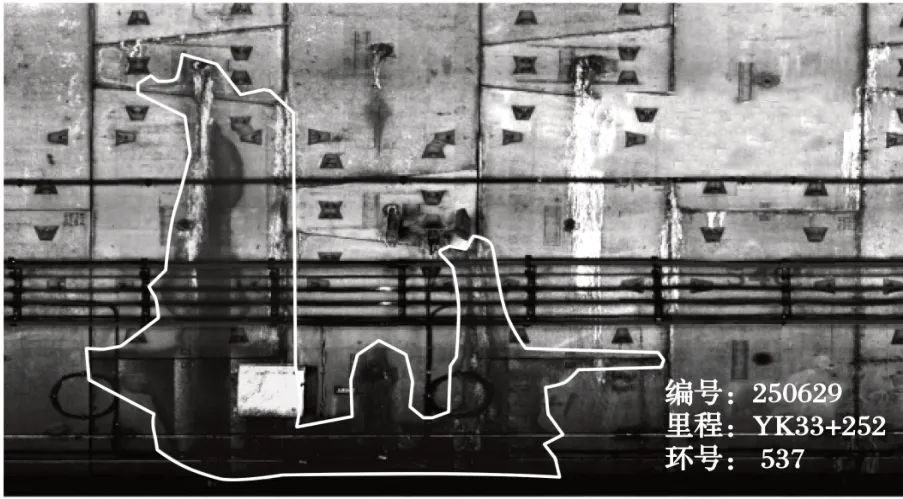
圖2 CCD成像掃描系統滲漏水病害檢測圖
4 三維激光掃描技術和CCD成像掃描技術的優缺點
三維激光掃描技術的缺點:(1)大量的點云數據需求和設備對振動控制的要求,限制了軌道小車的速度,速度控制在5 km/h以下;(2)圖像分辨率較低,如瑞士AMBERG技術公司開發的GRP5000檢測系統,該檢測系統采集的圖像分辨率僅為5 mm/dpi。
三維激光掃描技術的優點:(1)設備精確度高,可準確得到隧道錯臺、滲漏水、裂縫等表觀病害情況,并能夠對隧道結構斷面進行精準測量,形成隧道收斂成果,代替傳統斷面收斂檢測;(2)設備體積小,功率小,不需要占用行車作業點,具有機動靈活、適應環境強等優點。
CCD成像掃描技術缺點:(1)設備體積大,需要使用工程車進行拖掛并提供電力,占用行車作業點;(2)數據量較大,每公里隧道形成數據約0.5 TB,占用大量存儲資源。
CCD成像掃描技術優點:(1)檢測速度快,檢測速度約30~35 km/h,可快速完成城軌線網級檢測;(2)檢測圖像清晰,可準確反映滲漏水、裂縫、剝落等隧道表觀病害。
5 結語
根據地鐵現場使用和試驗的情況可知,三維激光掃描技術和CCD成像掃描技術均具有較高的準確率,可滿足隧道表面快速檢測的需求,但根據成像原理的不同,兩種技術有不同的優缺點及不同的使用場景。CCD成像掃描技術適用于城軌隧道結構全線檢測,建立全壽命周期的成長健康狀況“檔案館”,為軌道隧道運營提供病害預警。三維激光掃描技術適用于小范圍隧道結構檢測,如檢測地區范圍內施工對既有地下隧道結構的影響。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
電子制作(2018年11期)2018-08-04 03:26:08
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
海峽科技與產業(2016年3期)2016-05-17 04:32:12
工業設計(2016年12期)2016-04-16 02:52:00