基于機器學習的電梯故障診斷云系統(tǒng)
2021-05-16 10:32:24沈世焜
科學技術創(chuàng)新 2021年13期
沈世焜
(江蘇安全技術職業(yè)學院電氣工程學院,江蘇 徐州221000)
目前,不同類型的電梯在商場、公寓、工廠、醫(yī)院、車站、街道立交橋等場所的使用越來越多,人們對電梯的安全性和可靠性要求越來越高。在大多數(shù)情況下,電梯由維護工程師定期檢查。然而,維修工程師的檢查結(jié)果往往過于主觀,無法保證電梯的安全水平。因此,一些電梯狀態(tài)監(jiān)測和故障診斷系統(tǒng)或設備已經(jīng)被研究人員和工程師提出。文獻[1]提出了一種基于移動電話GPRS 通信的電梯狀態(tài)遠程監(jiān)控系統(tǒng)。介紹了該系統(tǒng)中不同傳感器和處理器的選擇和安裝,并對其軟件功能進行了分析。在分析了傳統(tǒng)故障診斷方法的優(yōu)缺點后,文獻[2]提出了基于多智能體技術的電梯故障診斷方法。建立了電梯故障診斷模型,描述了故障診斷系統(tǒng)的結(jié)構(gòu)和步驟,最后討論了電梯故障診斷方法的算法和步驟。文獻[3]討論了現(xiàn)有電梯故障診斷系統(tǒng)和技術在實時性方面的不足,提出了基于模糊神經(jīng)網(wǎng)絡和D-S 證據(jù)理論的信息融合算法來實現(xiàn)電梯故障診斷,設計了基于FPGA 的數(shù)據(jù)采集與特征提取裝置。文獻[4]基于大量電梯故障數(shù)據(jù),分析了中國新疆地區(qū)電梯運行故障特征,但并非基于大數(shù)據(jù)實現(xiàn)電梯故障自動診斷。文獻[5]結(jié)合各類電梯狀態(tài)信息集成的需要,利用物聯(lián)網(wǎng)和互聯(lián)網(wǎng)技術,設計了電梯遠程監(jiān)控系統(tǒng)。然而,在電梯系統(tǒng)中安裝的監(jiān)控設備顯然會增加成本。
針對現(xiàn)有電梯監(jiān)控設備和故障診斷系統(tǒng)存在的問題,提出了一種基于機器學習的電梯故障診斷云系統(tǒng)。該系統(tǒng)通過智能設備的振動傳感器感器檢測電梯的振動狀況,并將監(jiān)測數(shù)據(jù)從智能設備傳輸?shù)皆品掌鳌H缓髽?gòu)建了基于大數(shù)據(jù)及機器學習的電梯故障診斷與預測的總體方案,采用非監(jiān)督學習建立電梯故障模型,采用監(jiān)督學習對所提取到的電梯轎廂振動特征參數(shù)進行了充分的數(shù)據(jù)挖掘與分析。第一節(jié)分析了智能電梯故障診斷系統(tǒng)的體系結(jié)構(gòu)。第二節(jié)介紹了該云系統(tǒng)的軟件需求。第三節(jié)給出了電梯振動和聲音監(jiān)測實驗。
1 電梯故障診斷系統(tǒng)體系結(jié)構(gòu)
本系統(tǒng)以電梯使用單位(如商場、住宅、工廠、醫(yī)院等)的檢測以及政府的電梯保安人員為基礎。檢測時建議將智能設備放置在電梯的固定位置,啟動振動傳感器數(shù)據(jù)采集專用應用程序,數(shù)據(jù)采集應在干擾較小的條件下進行。本系統(tǒng)結(jié)構(gòu)如圖1所示,應用程序在獲得振動數(shù)據(jù)后,通過互聯(lián)網(wǎng)傳輸?shù)皆品掌鳌T品掌魇腔谠萍汉吞摂M化技術開發(fā)的。這些服務器安全性高、性能好、容災能力強,而且價格相對低廉、易于擴展。在云服務器中,基于大數(shù)據(jù)的無監(jiān)督學習和監(jiān)督學習,對電梯的健康狀況進行評估,并做出維護/檢查決策。

圖1 本系統(tǒng)結(jié)構(gòu)圖
2 基于智能設備的電梯振動數(shù)據(jù)采集
為了驗證所提出的基于智能手機的電梯故障診斷系統(tǒng)的可行性,利用紅米K20Pro 智能手機對所屬電梯的振動和噪聲信號進行了數(shù)據(jù)采集實驗。試驗結(jié)果如圖2、3 所示。圖2 和3 給出了某部電梯在同一運行時水平X 方向和水平Y(jié) 方向的振動試驗結(jié)果。發(fā)現(xiàn)智能手機加速度/振動傳感器在水平方向存在系統(tǒng)測量誤差,誤差約為0.2m/s2。電梯運行過程中,水平方向的振動幅度約為0.1m/s2。在圖2 和3 中的5s 處,電梯門關上了,其水平方向的振幅明顯增大,近似達到-0.3-1.4m/s2。

圖2 X 方向的振動試驗結(jié)果
圖4 顯示了垂直Z 方向的振動試驗結(jié)果,試驗位置的重力加速度為9.7952m/s2。垂直Z 方向的振動信號能很好地解釋被測電梯的加減速過程。這種振動信號與電梯機械或電氣部件的健康狀況有著明顯的聯(lián)系,是電梯故障診斷的一個非常重要的指標。
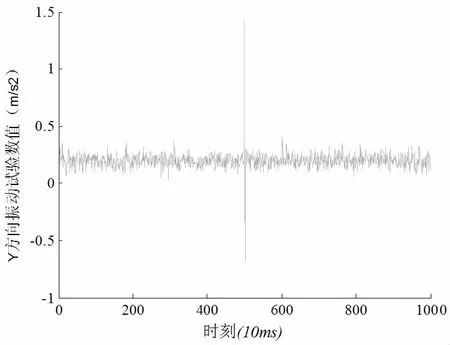
圖3 Y 方向的振動試驗結(jié)果

圖4 Z 方向的振動試驗結(jié)果
然后,選取五臺相同型號的電梯分別進行檢測,針對檢測到的五臺電梯垂直Z 方向的振動數(shù)據(jù)分別計算平均值、均方根、偏度、峰度和峰- 峰值,這五個特征,如表1 所示。

表1 電梯垂直Z 軸方向振動數(shù)據(jù)特征值
表1 給出了五個特征的結(jié)果。結(jié)果表明,不同狀態(tài)的電梯的振動特征不同,這表明振動特征可作為電梯故障診斷系統(tǒng)的關鍵依據(jù)。
3 基于機器學習的故障診斷
依據(jù)電梯振動數(shù)據(jù),基于機器學習的故障診斷采用無監(jiān)督學習聚類分析方法建立電梯故障模型,而有監(jiān)督學習則利用回歸分析對電梯故障進行診斷和預測。
3.1 無監(jiān)督學習的故障診斷模型
無監(jiān)督學習方法通過聚類分析的多次迭代建立電梯故障診斷模型,當模型收斂時算法停止。假設提取了一批電梯轎廂Z軸方向的振動信號的特征數(shù)據(jù):
特征1=A1,A2,A3,…
特征2=B1,B2,B3,…
其中:特征1、特征2 為電梯轎廂Z 軸方向的振動數(shù)據(jù)特征。電梯特征分類張成空間稱為電梯故障診斷特征空間;[Ai,Bi](i=1,2,3,…)對應為第i 個電梯轎廂振動數(shù)據(jù)中的振動特征值向量。同時為了建立電梯故障診斷模型,還需要獲取對應的訓練樣本的診斷結(jié)果信息,例如特征向量[A1,B1]→C1對應電梯狀態(tài)為無故障;特征向量[A2,B2]→C2對應電梯狀態(tài)為故障1;特征向量[A3,B3]→C3對應的電梯狀態(tài)為故障2。我們將以上這種帶有故障診斷結(jié)果狀態(tài)信息稱為故障標記。同時將帶有這種故障診斷標記信息的電梯轎廂振動特性數(shù)據(jù)稱為診斷實例,再將電梯轎廂Z 軸方向的振動數(shù)據(jù)和診斷結(jié)果形成一個新的特征向量[Ai,Bi,Ci]。其中的故障診斷標記信息“正常”、“故障1”和“故障2”不作為訓練樣本的結(jié)果信息,而是與電梯轎廂振動特性數(shù)據(jù)一起等效地放入訓練樣本中,形成一個新的特征向量。
3.2 監(jiān)督學習的故障診斷與預測
監(jiān)督學習利用回歸分析方法,根據(jù)電梯轎廂Z 軸方向的振動歷史監(jiān)測數(shù)據(jù),給出了故障系數(shù)。電梯故障系數(shù)是故障出現(xiàn)的可能性指標。本文電梯機械系統(tǒng)故障風險系數(shù)的計算方法如下:
電梯故障i 對應的電梯轎廂振動特征向量為[Ai,Bi,Ci,…],其k 范數(shù)(k=1,2,3,…,∞)為normk。無故障發(fā)生時對應特征向量為 [A0,B0,C0,…] 取其k 范數(shù)為norm0,二者之差為normk-norm0,將其歸一化即為故障i 的風險系數(shù),例如當故障i發(fā)生時,其故障風險系數(shù)值為1;當故障i 未發(fā)生且故障排除時間剛好足夠時,其故障風險系數(shù)值為臨界值。
設D={x1,x2,…,xm}表示一個包含m 個電梯轎廂振動特性數(shù)據(jù)的數(shù)據(jù)集。通過D 描述每個電梯轎廂振動特性數(shù)據(jù),然后每個電梯轎廂振動特征數(shù)據(jù)[xi1,xi2,…,xid]是d 維樣本空間中的向量。其中,xi∈x 是xi在第j 個特征分類上的值,d 是樣本數(shù)據(jù) 維數(shù)。電梯故障預測的任務一般是從訓練集{(x1,y1),(x2,y2)…(xm,ym)}中學習,建立從輸入空間x 到輸出空間γ:X→γ 的映射f。
4 結(jié)論
本文提出了一種基于智能設備振動監(jiān)測和機器學習的電梯故障診斷云系統(tǒng)方案,首先通過智能設備的振動測試,發(fā)現(xiàn)X、Y 兩個方向的振動數(shù)據(jù)存在系統(tǒng)誤差,而垂直Z 方向的振動數(shù)據(jù)能反映電梯機電部分的健康狀況,并對振動數(shù)據(jù)進行了五個特征的計算。基于故障特征,進一步通過無監(jiān)督學習與監(jiān)督學習對電梯轎廂振動特征參數(shù)進行數(shù)據(jù)挖掘與分析,分析得出電梯機械系統(tǒng)各種故障隱患與電梯運行時振動信號之間的內(nèi)在關系,從而實現(xiàn)電梯系統(tǒng)中的各種故障診斷和預測。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年1期)2021-01-21 03:22:38
小學生學習指導(低年級)(2018年3期)2018-01-31 02:18:58
小學生時代·綜合版(2016年7期)2016-05-14 17:53:49
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
小說月刊(2015年4期)2015-04-18 13:55:18
小天使·一年級語數(shù)英綜合(2015年2期)2015-01-14 06:35:05
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
機械與電子(2014年1期)2014-02-28 02:07:31
