大位移傳感器的設計與驗證
2021-05-15 06:59:52姬鵬飛武亞軍
傳感技術學報 2021年2期
姬鵬飛武亞軍
(上海大學力學與工程科學學院,上海200444)
隨著近年來我國道路、鐵路、各類管道等基礎工程建設量的大幅增加,在此類施工中邊坡、基坑等結構大量出現[1];基坑和邊坡不僅是各種工程建設的基礎,也是影響施工地點周圍一定區域內已有建筑物、構筑物穩定性的重要因素,所以對土體監測變的尤為重要[2-3]。
在土體傾斜監測領域,目前應用最廣泛的是傳統測斜儀[4-5]。 使用測斜儀需要提前預埋測斜管,在測量提取數據時要有作業人員到現場下放測斜儀[5-6]。 因為使用測斜儀必須定點定時監測所以會受到較多因素的影響,比如人為因素、儀器因素和環境因素等,且做一次監測的讀數時間很長,所得到的結果不一定準確[7-8]。
針對傳統監測方法中存在的問題,不少學者提出了以各類傳感器為基礎土體監測方法,此類方法很大程度上避免了監測過程中出現人為失誤的可能性,同時提高了監測過程的連續性和準確性。 2012年,龐學雷[9]等人發表一篇關于無線監測系統在上海迪士尼工程軟基處理中的應用,探索無線遠距離監測告別傳統檢測手段的實施辦法。 文章中介紹無線監測系統可以分作,監測模塊、傳輸模塊、后臺處理模塊。 2019 年,施斌[10]團隊采用光纖監測馬家溝滑坡深部位移。 其研究結果表明光纖既可以作為分布式監測傳感器同時也是傳輸數據的載體。 需要與樁體一起組合使用,但施工和保護難度很大。 江鋒[11]等人發表一篇關于新型沉降板在高鐵施工中的應用研究,雖然避免了老式沉降板易破壞難恢復的缺點,但其設計的新型沉降板仍存在防護罩受力不均,回填土過程中可能出現偏差傾覆。 其設計的新式沉降板分辨率達到1 mm。 都悅來[12]等人利用Flex 測斜技術設計的彎曲傳感器,其精度在動態條件下絕對誤差為1°~3°,相對誤差為2%~6%。 近些年洪成雨[13-16]針對巖土測量,采用3D 打印技術運用不同的新材料制作了很多新穎的傳感器對本研究提供了新的設計思路。
如今在土體監測領域探索的新技術仍有很多需要改進的地方。 大多數研究偏向于應用新的施工工藝、改進算法。 多數設計應用在巖土施工現場的傳感器施工復雜、難保護、測量精度低、數據需要定期人工采集。 因此設計一個易操作,有高精度的傳感器對于土體精確監測,小變形感知有著重要的意義。
本研究提出了一種新的基于Flex 傳感技術的無線位移監測系統。 利用Flex 傳感器的優良性質,獨特地設計一種封裝結構,將Flex 植入該孔結構中。 所設計傳感器結構能保證Flex 可以契合于測斜或測沉降。 在結構設計時采用分布式的串聯方式,使得每個傳感器點與點之間的測量結果可以擬合土體的實際變形。 另外在使用傳感器時需要注意,預埋時令所有組合傳感器保持鉛錘或水平放置。這樣可以盡可能模擬一個未免的土體初始狀態。 該系統對邊坡位移,基坑傾斜進行無線實時監測,并且有著良好的精確度和準確性。
1 Flex 傳感器原理介紹
傳感器結構如圖1 所示,可以分為傳感元件,封裝結構,以及數據傳輸模塊。

圖1
Flex 彎曲傳感器是一種主要由導電元件和底物組成的條形電阻式傳感器。 可以應用于Flex 彎曲傳感器上的導電元件包括基于碳元素構成的油墨、顆粒、納米管等,以及一些特殊金屬,比如銅、銀等,此外也可以使用導電橡膠作為導電元件。
Flex 傳感器受到彎曲作用時,其電阻會產生變化。 存在如下關系:

式中:GF 是指應變影響因素,它的數值取決于傳感器制作材料以及工藝;ΔR是電阻變化值;R為初始狀態的電阻值;ε為機械應變。
由式(1)可知,決定選擇何種導電元件的因素主要有兩個,分別是導電元件與底物的附著性能好壞以及傳感器使用環境與導電元件特性是否匹配。Flex 彎曲傳感器的底物材料決定了整個傳感器的柔韌性,底物與導電元件之間的附著性會影響Flex 彎曲傳感器整體的電阻輸出及使用穩定性。 當GF 一定時,電阻的變化與機械應變成正比。 通過Flex 傳感器可以將彎曲應變轉化為電信號,由于有良好的線性關系,可以達到測量變形的目的。
封裝結構是采用3D 打印設備應用熔融沉積(FDM)技術,在軟件中設計制作。 打印成型如圖1(b)所示。 傳感器的藍牙模塊與電腦的藍牙連接后,打開客戶端XCOMv2.0。 在界面點擊打開串口后實時顯示數據。
本測斜傳感器設計采用定制的Flex 自制。 其中傳感元件是采用Flex Sensor 4.5″單向彎曲傳感器。 此傳 感 器 規 格 為: 總 長112. 24 mm, 總 寬6.35 mm,厚度不大于0.43 mm,有效測量長度95.25 mm。 筆直狀態下的電阻值為10 kΩ,彎曲時電阻變化范圍為60 kΩ~110 kΩ,額定功率0.5 W,峰值功率為1.0 W。 電阻公差值為±30%,工作溫度范圍為-35 ℃~+80 ℃。 使用壽命為超過100 萬次彎曲。分辨率為0.3°~0.4°。
傳感器的標定過程為:首先將Flex 測斜傳感器連接好以后,水平放置,待軟件顯示的數據平穩后,開始進行標定試驗。
標定時將量角器與Flex 測斜傳感器外殼緊密貼合,避免出現間隙造成標定誤差,必要時可以用膠帶在端頭固定。 標定需要嚴格按照節點彎曲0°、5°、10°、15°、20°、25°、30°、35°、40°、45°、50°、55°、60° 來控制,且每次彎曲一個角度時需要停留10 s確保采集到的數據穩定。 這樣可以得到一組階梯式的標定圖,圖2~圖4 所示。
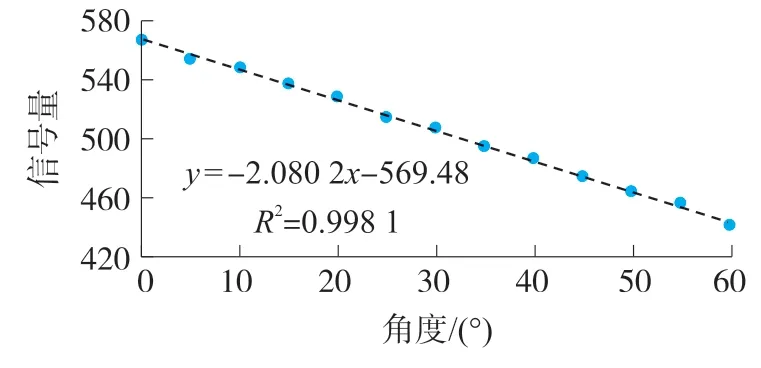
圖2 1 號傳感元件標定結果
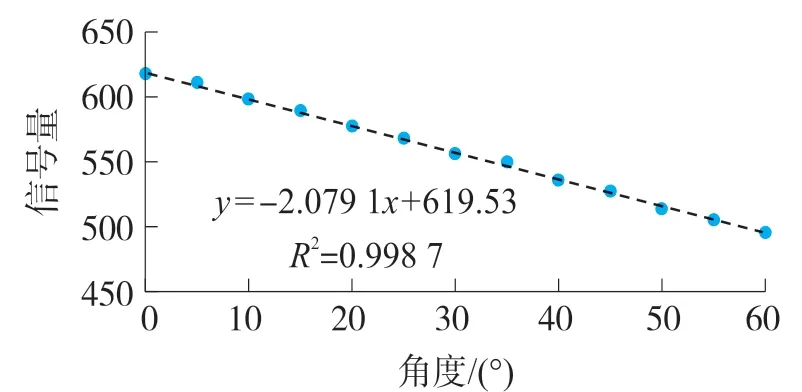
圖3 2 號傳感元件標定結果

圖4 3 號傳感元件標定結果
1 號Flex 彎曲傳感器的標定試驗結果顯示,在傳感器彎曲角度為0°時,其穩定的輸出信號量為569,在彎曲角度為60°時,其穩定的輸出信號量為442,整個標定試驗過程中信號量的變化為127。 從圖2 可以看出,當彎曲角度變大時,Flex 彎曲傳感器的輸出信號量變小。 可得出結論:1 號Flex 彎曲傳感器的輸出信號量與其彎曲角度的關系可以看作是線性的,且符合式(1)所分析的結果。
2 號Flex 彎曲傳感器的標定試驗結果顯示,在傳感器彎曲角度為0°時,其穩定的輸出信號量為618,在彎曲角度為60°時,其穩定的輸出信號量為495,整個標定試驗過程中信號量的變化為123。 從圖3 可以看出,當彎曲角度變大時,Flex 彎曲傳感器的輸出信號量變小。 可得出結論:2 號Flex 彎曲傳感器的輸出信號量與其彎曲角度的關系可近似認為是線性的,且符合式(1)分析的結果。
3 號Flex 彎曲傳感器的標定試驗結果顯示,在傳感器彎曲角度為0°時,其穩定的輸出信號量為496,在彎曲角度為60°時,其穩定的輸出信號量為366,整個標定試驗過程中信號量的變化為130。 從圖4 可以看出,當彎曲角度變大時,Flex彎曲傳感器的輸出信號量變小。 可得出結論:3號Flex 彎曲傳感器的輸出信號量與其彎曲角度的關系可近似認為是線性的,且符合式(1)分析的結果。
由標定得到的數據具有良好的線性關系。 在標定的范圍內,角度變化統一在0°至60°,組合使用足以反映模型箱試驗土體的變形。 為基坑模型箱加載過程中反應土體傾斜變化做了試驗基礎。
2 基于Flex 彎曲傳感器的基坑模型加載試驗
基坑加載設計思路為:該設計傳感器主要用于巖土工程中土體的傾斜監測,在基坑模型箱試驗中,基坑邊縱向加載時土體側向會發生大變形,其產生的側移可以檢測該新型Flex 測斜傳感器是否能發揮作用。
在模型箱中,利用模型箱和試驗所用砂土,堆砌與實際施工條件相似的基坑結構。 將標定好的三個flex 傳感器預埋至基坑內設計位置。 模型箱為長方體,尺寸為700 mm×300 mm×400 mm。 模型箱四壁貼合底部有墊板貼合確保試驗所用的沙土深度從刻度尺標識深度計算。 正面可視玻璃用可貼的刻度尺條做標記。
將制作好的Flex 測斜傳感器連接好,測試可以成功接收信號后將其豎直埋置于土體如圖5 中所示位置。 用擋板模擬基坑工程中的擋土墻,在加壓過程中防止出現突然的大變形破壞。
試驗過程為:如圖5 所示的加載位置處逐漸加載砝碼盤,加載以每100 s 加一個砝碼盤的速度增加荷載。 砝碼盤規格為5.1 kg。 當加載至數據出現瞬時下降趨勢時停止增加砝碼盤,此狀態說明已經失穩。此時保存終端回傳好的數據,并記錄加載重量。

圖5 Flex 無線傳感器測斜布置圖
2.1 試驗結果分析

圖6 Flex 回傳數據整理
從圖6 中數據可以看出,1,2,3 號傳感器信號均呈現遞減的趨勢,在最終失穩時1 號與2 號出現了瞬時減小的趨勢。 在0~400 s 的時間內整體變化波動很小,說明最初加載時對基坑的影響很小,基坑自身的塑形可以承受此時的荷載。 隨著第400 s 時的繼續加載造成基坑接近失穩,開始了出現較之前更大的變形。 3 號傳感器的整體變形較小,這說明了距離基坑底部的側向變形較小。 由上述設計試驗后采得的數據整理分析得出角度數據與時間變化的關系圖,如圖7 所示。 圖7 所示的三個傳感器,隨著加載過程,每個的Flex 傳感器的彎曲角度均在0°~40°之間,其轉化公式是將所得的信號數值圖6 的數據,分別代入到各個傳感器標定時的擬函數Y 值中,反算X 角度值。

圖7 Flex 信號經標定轉化為角度
3 基于Flex 彎曲傳感器的邊坡模型加載試驗
邊坡加載設計思路是,基于設計的Flex 傳感可以監測土體層的變形,傳感器水平設置時可以用作沉降監測,在邊坡模型箱試驗里可以測試設計傳感器在其他情況下的應用。 且在試驗時放置位移計,對試驗結果輔助分析。
同樣在模型箱中堆砌與實際施工條件相似的邊坡結構,如圖8 所示。 將標定好的三個Flex 傳感器預埋至邊坡設計位置,且一端需要與模型箱壁固定以確保初始埋置狀態是水平。 模型箱為長方體,尺寸為700 mm×300 mm×400 mm。 模型箱所堆沙土要與四壁貼合,確保深度從刻度尺標識深度計算。正面可視玻璃用可貼的刻度尺條做標記。

圖8 邊坡模型Flex 傳感器測沉降布置
3.1 試驗結果分析
在邊坡加載試驗中Flex 回傳的數據經標定轉化后得到角度變形圖如圖9 所示。 2 號傳感器整體趨近于0 且其變化幅度很小,說明在此點位的幾乎沒有發生彎折,此處傳感器監測的土層是接近線性的。 符合加載時平面均布荷載的加載預期。 1 號傳感器整體成線性正向遞增,說明一號傳感器變形角度向下,且變化比較均勻。 在停止加載時角度變化了3.3°。3 號傳感器負向增加,且出現了瞬變趨勢,說明其角度變化向上。 在停止加載時角度變化了9.8°
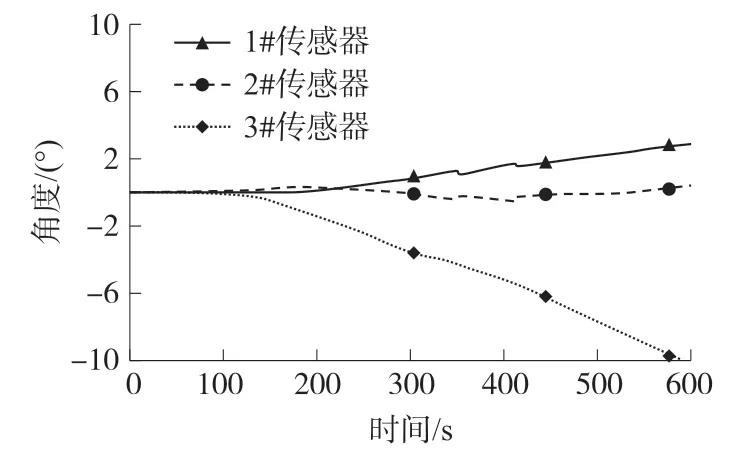
圖9 Flex 測得角度變化
位移計的編號依次是2#、4#、3#位移計,接入動態采集儀的2#、4#、3#通道。 得到圖10 所示數據。 3 號位移計先增加后減少,說明在3 號點位處土體先上升后下降,且在停止加載后土體下降量相較于其他點位變化量最少。 2 號點位整體呈現下降趨勢,且較為均勻,在停止加載時其點位低于3 號點高于4 號點。 4號點位整體呈下降趨勢且出現了瞬變,在停止加載時下降量最大。 所呈現的變形趨勢符合Flex 測得的結果。 分析300 s~350 s 內的數據,Flex 測得其中的變化結果與傳統位移計分析的變形趨勢接近。

圖10 位移計檢測結果
經過對實驗結果的處理,在整個實驗過程中共計產生了9 000 多組有效數據。 在保證誤差分析的準確性的同時要提高數據的分析效率,需要選取具有代表性的樣本經行分析。 因此取500 s~600 s 這一區間的四號位移計和Flex1#與2#的測量數據做對比分析。從圖11 中可以看出兩者的沉降變化趨勢基本保持一致,然后以傳統位移計為參考標準進行相對誤差計算,得到Flex 傳感器的檢測結果的偏差率為1.73%。引起這樣的偏差主要來自兩個方面。 一是在標定過程中,難以保證Flex 傳感元件與封裝結構內部不發生相對位移。 二是分布式傳感器固有的累計誤差問題,在結果分析時需要根據標定結果對傳感器設置修正系數,來降低累計誤差的影響。

圖11 位移計與Flex 傳感器檢測結果對比
4 結論
本研究旨在研發一種基于Flex 無線傳感技術與3D 打印技術,可應用于巖土工程領域的土體變形監測傳感器。 通過室內試驗以及相應的分析得出如下結論:
①較高自由度的3D 打印技術可以高效靈活的設計Flex 傳感器的封裝保護裝置,并且通過該封裝裝置構成了位移傳感結構。
②在標定過程中發現Flex 的線性關系可以在0~60°時保持良好的線性,由此可以通過集到數據反推被測土體傾斜角度及位移。 從標定試驗發現所設計的Flex 傳感器分辨率可以達到0.3°~0.4°
③該Flex 在單向變形時可以檢測到角度變化,適合用在基坑這類可預知變形趨勢的檢測中,相比于傳統測斜傳感器其無線傳輸更有優勢。
④所設計傳感器和土體位移計之間會有誤差,整體偏差率為1.73%,在使用過程中可以保證測得土體變形的變化趨勢。 并提出了可以通過兩個角度來進一步提高傳感器檢測精度。
猜你喜歡
中華詩詞(2020年1期)2020-09-21 09:24:52
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
