三關(guān)節(jié)式軟體驅(qū)動器的設(shè)計及其彎曲性能分析
2021-05-14 10:21:06王成軍
工程設(shè)計學報 2021年2期
關(guān)鍵詞:結(jié)構(gòu)
王成軍,李 帥
(1.深部煤礦采動響應(yīng)與災(zāi)害防控國家重點實驗室,安徽淮南232001;2.安徽理工大學機械工程學院,安徽淮南232001;3.安徽理工大學人工智能學院,安徽淮南232001)
傳統(tǒng)機器人是用剛性材料制成的,其在人機交互的安全性和環(huán)境適應(yīng)性等方面存在局限和不足[1‐3]。近年來,隨著仿生技術(shù)、快速成型技術(shù)以及智能材料的發(fā)展,軟體機器人技術(shù)得以迅速發(fā)展,彌補了傳統(tǒng)機器人在某些特殊領(lǐng)域應(yīng)用的不足。軟體驅(qū)動器作為軟體機器人的重要分支之一,應(yīng)用范圍較廣,因此引起了國內(nèi)外學者的廣泛關(guān)注[4‐6]。
軟體驅(qū)動器的驅(qū)動可分為智能材料驅(qū)動和氣動驅(qū)動[7‐10]。氣動軟體驅(qū)動器制造容易、成本低,僅需較低電壓即可產(chǎn)生較大的變形,因此倍受研究者關(guān)注。由加壓型流體彈性硅膠制作的軟體驅(qū)動器是目前主要的氣動軟體驅(qū)動器[11‐13]。通過3D打印技術(shù)制造驅(qū)動器的模具,然后在模具中澆入超彈性硅膠材料,通過調(diào)節(jié)氣腔內(nèi)部的氣壓實現(xiàn)驅(qū)動器彎曲變形。在針對驅(qū)動器彎曲特性的研究中,超彈性材料由于其本身的非線性特性使得軟體機器人在設(shè)計、制造、建模等方面與傳統(tǒng)機器人存在較大區(qū)別。Hong等[14]研發(fā)了氣動常曲率彎曲驅(qū)動器,并通過實驗分析了驅(qū)動器彎曲角度與輸入氣壓之間的關(guān)系。日本東京農(nóng)業(yè)科技大學的Kou等[15]提出了一種微型軟體驅(qū)動器,并運用三階Mooney‐Rivlin函數(shù)對其建模和控制。哈佛大學的Mosadegh等[16]提出了一種可快速驅(qū)動的軟體常曲率驅(qū)動器,并通過有限元分析得到了驅(qū)動器彎曲角度與驅(qū)動氣壓的關(guān)系。Polygerinos等[17]針對線性增強型軟體氣動驅(qū)動器,采用有限元模型和軟纖維增強的彎曲執(zhí)行器求解了輸入氣壓與驅(qū)動器彎曲角度及輸出力之間的關(guān)系,為軟體驅(qū)動器的設(shè)計提供了參考。華中科技大學的Chen等[18]研發(fā)了一款由2個類似于正弦波形狀的腔室組成的雙向彎曲驅(qū)動器,通過有限元分析研究了節(jié)距和振幅對其彎曲性能的影響,并通過實驗測試了驅(qū)動器靈敏度及其輸出力。北京航空航天大學的謝哲新等[19]通過仿真分析軟件研究了在一定氣壓下三維軟體驅(qū)動器的材料硬度、腔道形狀對驅(qū)動器彎曲性能的影響。
目前,軟體驅(qū)動器大多設(shè)計為一體式彎曲[20‐22],這與人的手指彎曲存在較大差別,它不能有效地貼合在手指表面,存在人機交互效率低等問題。在軟體驅(qū)動器建模方面,目前的研究雖然在一定程度上能夠描述某些驅(qū)動器彎曲角度與輸入氣壓之間的關(guān)系[17,21],但未能系統(tǒng)地描述驅(qū)動器彎曲角度與輸入氣壓、彎曲性能與結(jié)構(gòu)參數(shù)之間的關(guān)系,且驅(qū)動器結(jié)構(gòu)參數(shù)對其彎曲性能影響的研究少見報道。因此,本文提出了一種三關(guān)節(jié)式軟體驅(qū)動器,建立了驅(qū)動器單氣囊彎曲角度與輸入氣壓之間的數(shù)學模型,研究了驅(qū)動器不同結(jié)構(gòu)參數(shù)在一定氣壓下對其彎曲性能的影響,并通過有限元仿真分析和實驗來驗證理論結(jié)果的正確性,最后通過測試軟體驅(qū)動器的輸出力和運動軌跡來進一步驗證軟體驅(qū)動器的實用性。
1 軟體驅(qū)動器的驅(qū)動原理及結(jié)構(gòu)設(shè)計
1.1 軟體驅(qū)動器的驅(qū)動原理
軟體驅(qū)動器的本體結(jié)構(gòu)由主體層和限制層組成,其中主體層由多個氣囊組成。其驅(qū)動原理如圖1所示。當驅(qū)動器通入氣體時,氣囊發(fā)生膨脹變形,由于底部限制層限制了底面伸長率,因此驅(qū)動器產(chǎn)生了向底部彎曲的運動。

圖1 軟體驅(qū)動器驅(qū)動原理示意Fig.1 Schematic of driving principle of soft actuator
1.2 軟體驅(qū)動器的結(jié)構(gòu)設(shè)計
根據(jù)手指結(jié)構(gòu)及驅(qū)動器的驅(qū)動原理設(shè)計了一種新型三關(guān)節(jié)式軟體驅(qū)動器。它由3個柔性關(guān)節(jié)(遠指關(guān)節(jié)、中指關(guān)節(jié)及近指關(guān)節(jié))和4段柔性指骨(遠指節(jié)、中指節(jié)、近指節(jié)及掌骨節(jié))組成,其內(nèi)部結(jié)構(gòu)和外觀如圖2和圖3所示。每個關(guān)節(jié)處都有獨立氣源作為動力。輸入的氣體經(jīng)過各通道口分別進入各段腔室內(nèi)。腔室部分作為軟體驅(qū)動器的指節(jié)部分,在內(nèi)部氣壓和限制層的作用下發(fā)生彎曲變形;非腔室部分為實體,作為軟體驅(qū)動器指節(jié)的部分不發(fā)生彎曲,從而可有效地貼合手指表面。為了更加符合人的手指外觀以及滿足各個手指指節(jié)不同的半徑要求,驅(qū)動器外觀采用“半圓形+長方形”設(shè)計。對軟體驅(qū)動器進行整體拔模,拔模角度為0.5°。

圖2 軟體驅(qū)動器的內(nèi)部結(jié)構(gòu)Fig.2 Internal structure of soft actuator

圖3 軟體驅(qū)動器的外觀Fig.3 Appearance of soft actuator
2 軟體驅(qū)動器彎曲數(shù)學模型
由于軟體驅(qū)動器的材料具有非線性特性,增大了軟體機器人的建模難度[23]。因此,本文采用分段常曲率(piecewise constant curvature,PCC)假設(shè) 模型[24‐25]來求解驅(qū)動器彎曲角度與輸入氣壓之間的關(guān)系。在理想條件下,軟體驅(qū)動器不受外力和重力的作用。根據(jù)微分學原理,假設(shè)各個氣囊的彎曲曲率恒定,整個彎曲弧段可看成由各個獨立的氣囊彎曲后的圓弧段連接而成。
2.1 本構(gòu)模型
硅膠材料是一種典型的非線性材料,一般采用應(yīng)變能密度函數(shù)描述其力學性能,可表示為:

式中:I1、I2、I3為硅膠材料的變形張量不變量,假設(shè)硅膠具有各項同性與不可壓縮性[26‐27],I3=1;λ1、λ2、λ3分別為氣囊長度、寬度及高度的伸長比。
選用Yeoh模型來描述硅膠材料在受力變形時的力學性能[28]。展開為多項式形式,則應(yīng)變能密度函數(shù)模型為:

式中:J為材料變形前后的體積比,對于不可壓縮材料,J=1;N為應(yīng)變能密度函數(shù)的階數(shù);Ci0和dk為材料常數(shù),可通過硅膠材料的單軸拉伸試驗測得。


2.2 氣囊變形數(shù)學模型
在限制層內(nèi)嵌入尼龍線可限制氣囊的徑向膨脹,忽略其對驅(qū)動器彎曲的力學影響。根據(jù)虛功原理,可得:

式中:WC為硅膠材料變形前后儲存能量的變化量;WL為驅(qū)動器外力所做的功;WW為重力勢能的改變量,可忽略不計;WG為氣體所做的功。
因驅(qū)動器無外力做功,WL=0,則式(7)可簡化為:WC+WG=0,即氣體所做的功即為驅(qū)動器儲存的能量。由此得:

式中:p為輸入氣壓;Vg為腔室體積;Vm為硅膠材料總體積;V為驅(qū)動器總體積。
氣囊的結(jié)構(gòu)參數(shù)如圖4所示,其中:l1、h2分別為氣囊在長度、高度方向的空腔長度;l2為氣囊壁厚;l3為氣囊間距;L為單氣囊總長度;h1為氣囊連接部分的高度;r、R分別為驅(qū)動器腔室的內(nèi)、外半徑;a為氣囊在高度方向的厚度;h為底層厚度。

圖4 氣囊結(jié)構(gòu)參數(shù)示意Fig.4 Schematic of structural parameters of airbag
對于單個氣囊,由幾何關(guān)系可得:

式中:D=2R,為驅(qū)動器腔室外直徑(以下簡稱為“腔室直徑”)。
當氣囊彎曲一定角度θ時:

單個氣囊長度方向的伸長比為[29]:

對彎曲角度θ進行求導,得到單個氣囊彎曲角度與輸入氣壓及結(jié)構(gòu)參數(shù)之間的關(guān)系為:

對于某一個氣囊,Vm、V為常數(shù),則每一個氣壓值p對應(yīng)于一個氣囊彎曲角度θ。
軟體驅(qū)動器的結(jié)構(gòu)參數(shù)如表1所示。

表1 軟體驅(qū)動器的結(jié)構(gòu)參數(shù)Table 1 Structural parameters of soft actuator
在30 kPa的輸入氣壓下,改變l2,保持其他結(jié)構(gòu)參數(shù)不變,根據(jù)式(13)可求得l2對軟體驅(qū)動器彎曲性能的影響。同理,可分別求得h和D對軟體驅(qū)動器彎曲性能的影響。軟體驅(qū)動器結(jié)構(gòu)參數(shù)對其彎曲性能影響的理論分析結(jié)果如圖5所示。從圖可知,θ與l2、h成反比,與D成正比,且l2的影響最為顯著。

圖5 軟體驅(qū)動器結(jié)構(gòu)參數(shù)對其彎曲性能影響的理論分析結(jié)果Fig.5 Theoretical analysis result of the influence of structur‐al parameters of soft actuator on its bending perfor‐mance
3 軟體驅(qū)動器彎曲性能的有限元仿真分析
3.1 軟體驅(qū)動器建模
運用Abaqus仿真軟件對軟體驅(qū)動器進行有限元分析。選用二階超彈性材料的Yeoh模型,設(shè)置C10=0.11 MPa,C20=0.02 MPa[17],采用十結(jié)點四面體單元C3D10H,對驅(qū)動器進行建模。不考慮驅(qū)動器出口壓縮空氣的作用,對驅(qū)動器每個關(guān)節(jié)的內(nèi)部腔室施加垂直于其表面的氣壓,使得軟體驅(qū)動器彎曲,如圖6所示。結(jié)果表明,當氣囊充分膨脹時,關(guān)節(jié)的相鄰腔室沒有相互接觸,不會影響驅(qū)動器的正常彎曲。

圖6 軟體驅(qū)動器彎曲的仿真結(jié)果Fig.6 Simulation result of the bending of soft actuator
3.2 結(jié)構(gòu)參數(shù)對彎曲性能的影響分析
通過控制變量法,在保證軟體驅(qū)動器總長度以及其他結(jié)構(gòu)參數(shù)不變的條件下,仿真研究壁厚l2、底層厚度h、腔室直徑D對軟體驅(qū)動器彎曲性能的影響,結(jié)果如圖7所示。
由圖7(a)可知,l2對軟體驅(qū)動器彎曲性能的影響最為顯著。在同一氣壓下,l2與θ基本呈反比。因此,l2過大會使軟體驅(qū)動器的彎曲角度過小,軟體驅(qū)動器達不到人體手指彎曲的角度范圍;若l2較小,則軟體驅(qū)動器的剛度較低,且有漲破的風險,直接影響軟體驅(qū)動器的使用壽命。
由圖7(b)可知,h對軟體驅(qū)動器彎曲性能的影響相對顯著。在同一氣壓下,隨著h的減小,θ變大,軟體驅(qū)動器容易彎曲。但h過小會導致軟體驅(qū)動器整體剛度較低,限制了軟體驅(qū)動器的應(yīng)用范圍。
由圖7(c)可知,D對軟體驅(qū)動器彎曲性能的影響較為顯著。在同一氣壓下,隨著D的增大,θ變大,軟體驅(qū)動器彎曲性能變好。但D過大或過小都不符合正常人的手指結(jié)構(gòu),手指間容易形成干涉。

圖7 軟體驅(qū)動器結(jié)構(gòu)參數(shù)對其彎曲性能影響的仿真分析結(jié)果Fig.7 Simulation result of the influence of structural parame‐ters of soft actuator on its bending performance
綜上可知,軟體驅(qū)動器結(jié)構(gòu)參數(shù)對其彎曲性能影響的仿真分析結(jié)果與理論分析結(jié)果一致,按影響顯著性排序,依次為壁厚、腔室直徑和底層厚度。
4 軟體驅(qū)動器的制作及其彎曲性能測試
4.1 軟體驅(qū)動器的制作
軟體驅(qū)動器采用硅膠材料制作,整體結(jié)構(gòu)采用模塑成型的方法制作。按表1所示的軟體驅(qū)動器的結(jié)構(gòu)參數(shù),通過3D打印技術(shù)制作軟體驅(qū)動器的主體層和限制層模具,如圖8所示。軟體手指的制作分4個步驟,如圖9所示。步驟1:稱取硅膠材料34 g,加入固化劑,機械攪拌至充分混合均勻。步驟2:將混合物置于真空箱中脫氣至無氣泡產(chǎn)生。步驟3:將混合物緩慢倒入模具,主體層B合在主體層A上以便在硅膠內(nèi)部形成腔室,固化12 h。步驟4:材料脫模后用硅膠液依次粘接限制層A、B和主體層,待其完全固化后將柔性硅膠管(外徑為4 mm,內(nèi)徑為2 mm)插入腔室內(nèi)。

圖8 軟體驅(qū)動器的模具Fig.8 Mold of soft actuator

圖9 軟體驅(qū)動器的制作步驟Fig.9 Production process of soft actuator
4.2 軟體驅(qū)動器彎曲性能的測試
為了驗證軟體驅(qū)動器彎曲角度與輸入氣壓之間關(guān)系仿真結(jié)果的準確性,搭建了如圖10所示的軟體驅(qū)動器彎曲性能測試平臺。該平臺通過外置的調(diào)速器調(diào)節(jié)氣泵電機的轉(zhuǎn)速及流量,氣體通過柔性硅膠管從氣泵經(jīng)過電磁閥輸送至軟體驅(qū)動器;氣壓傳感器將信號傳送給單片機,從而控制繼電器是否得電;通過繼電器控制電磁閥,進而實現(xiàn)軟體驅(qū)動器的彎曲、伸直等動作。

圖10 軟體驅(qū)動器彎曲性能測試平臺Fig.10 Test platform of bending performance of soft actuator
分別向軟體驅(qū)動器輸入0~50 kPa的氣體,通過彎曲傳感器測得驅(qū)動器彎曲角度。驅(qū)動器彎曲角度與輸入氣壓之間的關(guān)系如圖11所示。結(jié)果表明:彎曲角度隨輸入氣壓變化的理論計算結(jié)果與實驗結(jié)果的相對誤差隨著氣壓的增大而減小。當氣壓低于20 kPa時,其最大相對誤差為13.3%,主要原因是在理論計算時未考慮嵌入在限制層的尼龍線對驅(qū)動器彎曲性能的影響;當氣壓高于20 kPa時,尼龍線的影響越來越小,最小相對誤差為1.48%。

圖11 軟體驅(qū)動器彎曲角度與輸入氣壓之間的關(guān)系Fig.11 Relationship between bending angle of soft actuator and input air pressure
理論計算結(jié)果與仿真分析結(jié)果存在誤差的主要原因是在理論計算時假設(shè)了單氣囊彎曲為常曲率彎曲,而實際軟體驅(qū)動器的彎曲并非常曲率彎曲;實驗結(jié)果與仿真分析結(jié)果存在誤差的主要原因是在軟體驅(qū)動器制作過程中存在制造誤差以及彎曲傳感器限制了軟體驅(qū)動器的變形。
為了分析軟體驅(qū)動器輸出力與輸入氣壓的關(guān)系,搭建了軟體驅(qū)動器輸出力測試裝置,如圖12所示。調(diào)節(jié)測試裝置高度,并對數(shù)字秤校零。將掌骨節(jié)固定在裝置支撐架上,用數(shù)字秤(精度為0.01 g)測得軟體驅(qū)動器的輸出力。分別向3個腔室施加氣壓,得到軟體驅(qū)動器輸出力與輸入氣壓的關(guān)系,如圖13所示。隨著腔室內(nèi)部氣壓的增大,軟體驅(qū)動器的輸出力基本呈線性增加,當氣壓達到50 kPa時,輸出力為0.45 N。

圖12 軟體驅(qū)動器輸出力測試裝置Fig.12 Test device of output force of soft actuator
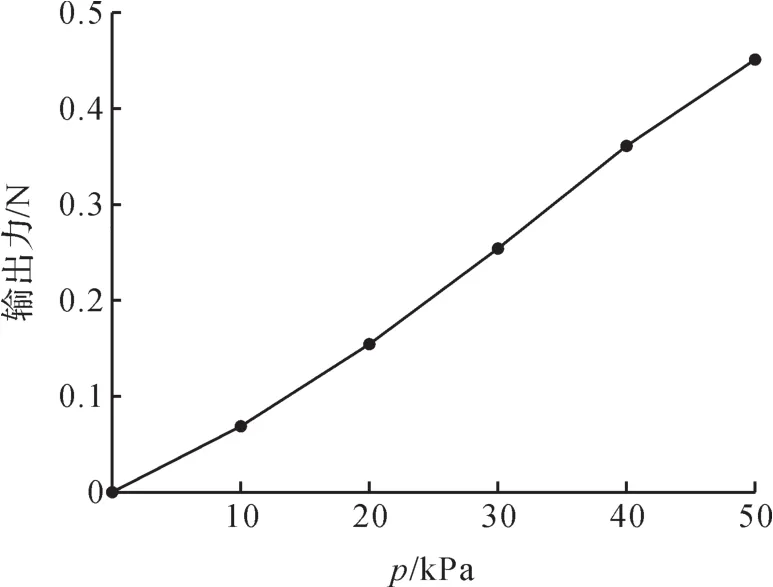
圖13 軟體驅(qū)動器輸出力與輸入氣壓的關(guān)系Fig.13 Relationship between output force of soft actuator and input air pressure
在軟體驅(qū)動器的不同位置標記點,在坐標紙上繪制在不同氣壓下軟體驅(qū)動器的彎曲輪廓,如圖14所示。由圖可知,在每段不同的腔室氣壓下,軟體驅(qū)動器表現(xiàn)出不同的彎曲輪廓。可見軟體驅(qū)動器可以很好地貼合人體手指表面,這進一步驗證了軟體驅(qū)動器的實用性。

圖14 軟體驅(qū)動器的彎曲輪廓Fig.14 Bending profile of soft actuator
5 軟體驅(qū)動器的應(yīng)用領(lǐng)域
軟體驅(qū)動器可用于輔助偏癱患者的手部康復訓練。與傳統(tǒng)康復機器人相比,它可以極大地減小患者由機器人本體的接觸壓力引起的不適感。如圖15所示,用魔術(shù)貼將軟體驅(qū)動器以外骨骼形式附著在人體中指表面,對其3個腔室輸入不同氣壓的氣體以實現(xiàn)3個手指關(guān)節(jié)不同程度的彎曲,使軟體驅(qū)動器更加安全有效地貼合人體手指。軟體驅(qū)動器符合人體手指的結(jié)構(gòu),在人機交互領(lǐng)域具有很大的應(yīng)用優(yōu)勢。

圖15 軟體驅(qū)動器的應(yīng)用Fig.15 Application of soft actuator
6 結(jié)論
根據(jù)人體手指結(jié)構(gòu),設(shè)計并制作了一種由3段腔室組成的軟體驅(qū)動器,其總質(zhì)量約為34 g。與常曲率彎曲手指相比,該軟體驅(qū)動器具有更高的靈活性和貼合性。建立了軟體驅(qū)動器的數(shù)學模型,并通過有限元仿真分析得到其結(jié)構(gòu)參數(shù)對彎曲性能影響的顯著性排序為壁厚、腔室半徑、底層厚度。實驗結(jié)果驗證了理論計算和仿真分析結(jié)果的正確性。測試了軟體驅(qū)動器的輸出力。當輸入氣壓達到50 kPa時,其輸出力為0.45 N,可滿足抓取輕量化物體的要求。該軟體驅(qū)動器可應(yīng)用于人機交互的輔助康復領(lǐng)域。
在接下來的研究中,筆者將利用有限元分析軟件來設(shè)計軟體驅(qū)動器的最佳結(jié)構(gòu)參數(shù),制作可應(yīng)用于農(nóng)業(yè)和生物醫(yī)學領(lǐng)域的仿人手結(jié)構(gòu)的軟體驅(qū)動器。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數(shù)理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
