基于小型無人機的高位危巖快速調查與穩定性評價
2021-05-14 09:38:24周成凱李遠耀王寧濤
科學技術與工程 2021年10期
關鍵詞:結構
周成凱, 李遠耀*, 王寧濤, 劉 壯
(1.地質探測與評估教育部重點實驗室, 武漢 430074; 2.中國地質大學(武漢)地質調查研究院, 武漢 430074; 3.中國地質調查局武漢地質調查中心, 武漢 430205)
中國是一個危巖崩塌地質災害頻發的國家。許多危巖體孕育于高陡巖質斜坡之上,具有明顯的隱蔽性和突發性,其早期的快速識別與穩定性評價一直是地質災害防治工作中重要的技術難題之一。
目前,中外危巖體調查評價研究主要集中在危巖體的失穩模式、危巖體穩定性分析、崩塌及落石運動特點以及危巖體防護治理等幾個方面。傳統的針對高位危巖的調查方法主要是通過地質人員進行地面調查,該方法不僅耗時、耗力、效率較低,同時調查過程中存在較大危險性。近年來,隨著遙測技術的飛速發展,一些非接觸式的新技術與新方法被引入至危巖體的調查與評價研究中,如焦盼飛[1]利用無人機采集影像,通過圖像處理手段得到了危巖崩塌中結構面的間距、危巖體規模、巖體表面不規則裂隙的尺寸等信息;孫娟娟等[2]采用無人機航攝方法,建立了浙江省神仙居景區某危巖體的三維模型,探索了準確識別巖體結構面幾何特征的方法;胡才源等[3]基于無人機遙感影像,采集貴州省仙宇屯高位危巖體的高精度正射影像和實景三維模型,精確識別了危巖體的發育特征;Vasuki等[4]利用無人機攝影測量技術采集地質結構體上的影像信息,通過采集的影像信息,基于圖像處理技術,半自動化提取出巖體表面的結構面的產狀;Vanneschi等[5]采取無人機攝影測量和三維激光掃描等手段獲取公路旁的危巖體的相關空間參數并進行穩定性分析,最后對該區域崩塌落石進行運動模擬得出了危險性分區圖。可見,無人機技術作為一種新技術方法的在危巖調查研究中應用逐漸增多。

圖1 獅子頭危巖體交通位置
然而,基于小型無人機平臺開展高位危巖體調查評價工作,在無人機的航線規劃、結構面快速調查與精準識別等方面仍存在一些不足。現利用旋翼式小型無人機,以重慶萬州獅子頭危巖體為典型對象,通過開展傾斜影像的采集,獲取高清影像并進行后處理,生成實景三維模型、數字正射影像圖(digital orthophoto map,DOM)、數字高程模型(digital elevation model, DEM)等數據,對危巖體發育特征進行分析和圖像識別,最后采用赤平投影方法對其穩定性進行了快速評價。研究成果可為高位危巖體的非接觸式測量、精細地質信息獲取及穩定性快速評價提供一種新的思路。
1 研究區概況
近年來,獅子頭危巖體陡崖帶曾發生不同程度的崩塌或落石災害,如2009年陡崖第2段發生小型崩塌(圖2),砸毀了下方房屋。2017年4月至5月因連續強降雨天氣,陡崖帶多次發生危巖崩塌,陡崖帶有兩處危巖發生較大體積的崩塌。危巖帶內由于砂泥巖的差異風化作用以及人類活動造成的巖體下部巖腔逐漸發育、擴大,后緣裂隙逐漸延伸貫通,構造裂隙不斷發育,形成了多處方量數十至上千方的危巖單體,其中,多數危巖體位于陡崖帶2、3段上部,距離陡崖底部高差100~200 m,屬于特高位危巖體。獅子頭危巖體下方為大周鎮鋪埡村四組移民居住區,一旦危巖帶發生大規模崩塌,其危害將十分嚴重。

圖2 獅子頭陡崖帶航拍圖
由于研究區陡崖帶地形極為陡峻,常規的地面調查很難開展近距離的危巖單體及結構面精細調查研究。因此探索采用無人機傾斜攝影技術為主、輔助以人工現場調查的手段,對該危巖地質災害進行全面系統的調查與評價。
2 基于小型無人機的高位危巖體快速調查
2.1 小型無人機系統組成
小型無人機攝影測量系統主要由兩個部分組成:空中飛行部分和地面控制部分[6]。地面控制系統給空中飛行器發出指令,空中飛行器搭載多種傳感器設備來獲取地面的遙感信息,所獲取信息可通過無人機圖傳系統傳輸至地面控制設備。其中,無人機飛行控制系統是串連整個觀測系統的核心,使無人機可在人工控制和自動控制間不同程度地自主飛行。
本文采用iFlier飛控系統。該飛控系統可自定義區域航線規劃,根據不同地質災害類型和任務需求設計了正射、傾斜、正視等多種遙感數據采集模式。同時,還可自主設定飛行速度以及高度、航線重疊率等飛行參數,目前廣泛運用于地質災害日常調查以及突發性地質災害的應急調查中[7]。
2.2 遙測航線規劃
無人機遙測時的航線規劃主要目的是基于調查需求,通過一定的算法控制無人機機身的運動與鏡頭角度的自動調節,實現單鏡頭無人機的傾斜攝影達到與多鏡頭傾斜攝影相同的效果。
獅子頭危巖帶的分布延伸長約1.3 km,陡崖帶平面形態呈橫長形,立面形態呈“V”字形。根據地形、主崩方向的差異性,將獅子頭危巖從中間山脊處分為兩段。危巖西側至山脊處為危巖A段,山脊至危巖東側為危巖B段。由于獅子頭危巖分布范圍較廣,無法通過一次航線規劃完成全部影像數據采集。因此結合獅子頭危巖體的特點,本次無人機調查主要采用正視模式、正視傾斜模式、傾斜攝影模式及全景模式的聯合拍攝方法。在危巖體的兩端和山脊處用全景模式拍攝采集影像,對于危巖體下方承災體部分用常規傾斜模式規劃航線進行拍攝,對于危巖立面信息采用正視和正視傾斜模式規劃航線進行拍攝(圖3)。
2.3 數據處理及應用
航線規劃完成后,則正式在研究區進行影像采集工作。采用大疆Mavic2行業版飛行器進行影像采集工作,由于其影像具有像幅小、像片旋角大、畸變較重、影像數據量大等特點,還需要進一步結合自動化的后處理軟件處理影像數據,生成實景三維模型、DOM(圖4)、DEM等數據[8]。本次研究主要采用Smart3D作為內業的后處理軟件。
根據無人機調查影像及攝影測量后處理軟件生成危巖帶的航測成果,首先生成危巖帶及其周邊范圍內的DEM數據,然后將DEM數據導入至arcgis中進行空間分析處理,生成危巖帶調查區域內的坡度圖、坡向圖如圖5所示。
進而,基于Smart3D中的Acute3DViewer輕量級可視化模塊瀏覽實景三維模型,并從多個角度觀察危巖帶巖體地質特征以及各危巖體側面的紋理信息,同時還可以通過其內置的測量模塊測量危巖體的長度、高度和體積等空間信息,為后續穩定性研究提供單體危巖的基礎數據[9](圖6)。
2.4 危巖帶工程地質分區
根據無人機獲取的遙感數據,將獅子頭危巖帶依據地形地貌和主崩方向分成A、B兩部分,如圖7所示。各段范圍及規模經Acute3Dviewer量測后如表1所示。
A1陡崖帶發育連續,延伸長約700 m,高程225~245 m,高14~20 m,坡向210°~230°,坡度75°~88°,其西側下方25~50 m為居民區,平均坡度16°~20°,中部下方為橘樹林,平均坡度25°~30°,東側靠近山脊,坡度約30°。A1陡崖帶西側較破碎,破碎帶靠近山脊,長約70 m,占A1陡崖帶總長的10%。
A2陡崖帶發育連續,延伸長約680 m。A2段高程275~310 m,高8~35 m,坡向205°~225°,坡度78°~85°,下部斜坡兩側陡中間緩,兩側坡度20°~30°,中間坡度10°~20°,中部有1戶1人居民居住。A2陡崖帶西側較破碎,破碎帶靠近山脊,長約170 m,占A2陡崖帶總長的25%。
A3陡崖帶間斷發育,延伸長約650 m,高程分布不一,325~365 m,高度6~40 m,坡向184°~225°,坡度80°~86°,其西側下方多為階梯型耕地,平均坡度約20°,中部及靠近山脊下方為荒林,多灌木,平均坡度25°~30°,東側靠近山脊,坡度約35°。
B1陡崖帶發育連續,延伸長約470 m。高程217~245 m,高9~18 m,坡向115°~120°,坡度75°~85°,距離下方移民居住區50~80 m,下部斜坡兩側陡中間緩,兩側坡度20°~30°,中間坡度10°~20°。
B2陡崖帶發育連續,延伸長約600 m。高程270~310 m,高8.5~35 m,坡向115°~140°,坡度78°~88°,下部斜坡主要為樹林坡度25°~35°。
B3陡崖帶發育連續,延伸長約580 m。高程315~375 m,高22~40 m,坡向120°~140°,坡度80°~88°,下部斜坡主要為樹林,坡度20°~30°,距離陡崖帶B2距離30~40 m。
3 危巖體結構面的精細識別
3.1 結構面的圖像識別
巖體結構面控制著危巖體的穩定性及破壞機制。傳統的結構面現場調查,主要以現場測線法與統計窗法作為主要方法,該方法雖簡單實用,但是對于高位危巖體的調查受地形影響,具有較大的局限性。現運用無人機技術對高位危巖體中結構面進行調查,并結合MATLAB軟件中的圖像處理技術對其進行識別提取,具有非接觸式與快捷實用等顯著優點。

圖7 獅子頭陡崖帶分段圖

表1 獅子頭陡崖帶基本發育特征
基于MATLAB圖像處理的結構面識別技術的基本原理,是通過無人機采集的危巖體表面影像,采用圖像增強模塊中的圖像平滑功能和圖像分析中的邊緣檢測功能、圖像特征提取中的霍夫(Hough)變換法,將結構面從高位危巖體中識別提取出來。具體流程如圖8所示。

圖8 結構面圖像處理識別流程圖
3.1.1 圖像預處理
圖像預處理主要包括圖像的灰度處理、對比度增強處理、降噪處理等基本流程,通過對無人機采集的圖像進行預處理突出圖像中所需要的主要信息,去除或弱化不需要的次要信息。
首先運用圖像預處理中的降噪模塊,去除圖像采集過程中產生的噪聲;因灰度圖相比于RGB真彩色圖可以加快在軟件中的運算速度,現將RGB彩色圖像進行灰度化轉換成灰度圖;再進一步采用圖像增強工具增大結構面與巖塊之間的對比度;最后,采用灰度均衡化的方法可得到結構面與危巖結構體背景差異明顯的灰度圖,如圖9所示。
3.1.2 圖像增強
圖像增強的目的在于突出圖像中的目標部分,而抑制圖像中多余的部分。本文采用中值濾波這種非線性的處理方法,通過對鄰域內像素按灰度值排序,基于排序的結果決定中心像素的灰度,消除離散噪聲點。MATLAB中提供了實現中值濾波的函數Medfilt2( ),處理結果如圖10所示。
3.1.3 圖像分析
1)邊緣檢測
圖像中不同的區域是由顏色相近的像素所組成,區域之間的邊緣表現為顏色上的躍變。邊緣檢測技術就是利用數學上微積分中的求導等方法找出圖像中躍變部分從而尋找出邊緣。邊緣檢測的算法基于對鄰域內像素灰度進行一階、二階求導及梯度運算,其結果通常以灰度圖或二值圖呈現,原圖像中的邊緣部分以灰度較高的像素顯示,無邊緣部分在灰度圖中則以黑色或灰色顯示[10]。
現選用Canny算子進行圖像邊緣檢測,Canny算子與其他邊緣檢測算子不同的是采用雙閾值的方法檢測,通過高閾值得到邊緣圖像、基于低閾值將高閾值圖像中的邊緣連接成輪廓,直到整個圖像的邊緣閉合[11]。
通過調整不同分割閾值,對比其邊緣檢測結果,得出閾值的取值為(0.7, 0.5)時相應的邊緣輪廓較為符合實際的邊緣分布情況,如圖11所示。

圖10 獅子頭危巖B3段局部中值濾波效果圖

圖11 Canny算子(0.7,0.5)邊緣檢測結果圖
2)圖像特征提取
霍夫變換是一種利用圖像的全局特征將特殊形狀的邊緣像素連接起來,從而在圖像中形成連續平滑的方法,實質上是基于點線之間的對偶性,將圖像中的曲線轉換為參數坐標系中的點,把形狀檢測問題轉化為尋找參數坐標系中的峰值問題。霍夫變換常用于圖像中直線和圓的檢測,因此也適用于結構面的識別中[12-13]。
如圖12~圖14所示經過一系列的圖像處理操作,由于無人機的拍攝角度和巖體表面植被覆蓋的限制,共自動識別出13條特征較為明顯的結構面,結合人工目視補充識別出5條結構面。基于上述圖像識別的流程,對獅子頭危巖體B3段危巖帶中的結構面進行識別提取,識別出的結構面如圖14所示。
3.2 結構面產狀識別
要識別結構面產狀需得出其傾向和傾角要素,無人機拍攝的影像上每一個像素點都有其經緯度信息。通過Acute3DViewe瀏覽危巖體三維模型可直接讀取巖體結構面任意一點的經緯度和高程。根據李水清等[14]在危巖體結構面上選擇不共面的三點,根據三點確定一個平面的原理算其法向量,進而求得該結構面的產狀(圖15)。
其原理為:設結構面法向量為n=(A,B,C),傾向α、傾角β為
(1)
(2)
式中:A=(y2-y1)(z3-z1)-(y3-y1)(z2-z1);B=(x3-x1)(z2-z1)-(x2-x1)(z3-z1);C=(x2-x1)(y3-y1)-(x3-x1)(y2-y1),其中x、y、z分別為平面上所取三點的坐標及高程;A、B、C為結構面法向量n的空間坐標。由A、B、C的組合關系可以查出傾向的方位角β方(表2)。

表2 傾向方位簡表
根據以上原理,將相關公式輸入到Excel表格中編寫相關程序以實現產狀自動計算,在表格中填入基于Acute3DViewer讀取的坐標高程即可自動算出獲取的結構面產狀。
4 危巖單體穩定性分析
通過無人機影像生成的三維模型,利用三點法測產狀的原理量測出B3段部分結構面產狀信息,并對其跡長通過Acute3DViewer中的測量工具量取同一位置的三維模型的長度。B3段危巖體部分結構面發育特征識別結果如表3所示。

表3 危巖帶B3段結構面信息表
基于以上無人機調查及識別結果,結合少量的地面補充調查。以B3段陡崖帶為例,對無人機識別的部分高位危巖采用赤平投影的方法進行穩定性分析[15],結果如表4所示。
5 結論
(1)以重慶市萬州區獅子頭危巖體為例,基于小型無人機,通過合理規劃航線、高效地采集數據,獲取有用的地質災害信息及其孕育環境的遙感影像數據。通過后處理軟件平臺計算生成二、三維數據產品,通過遙感信息提取技術與地質災害分析相結合,提供研究地質災害調查點的基礎數據,這種具有無接觸式、無視地形因素、高效安全等特點的調查手段,對高位危巖的快速調查具有重要意義。
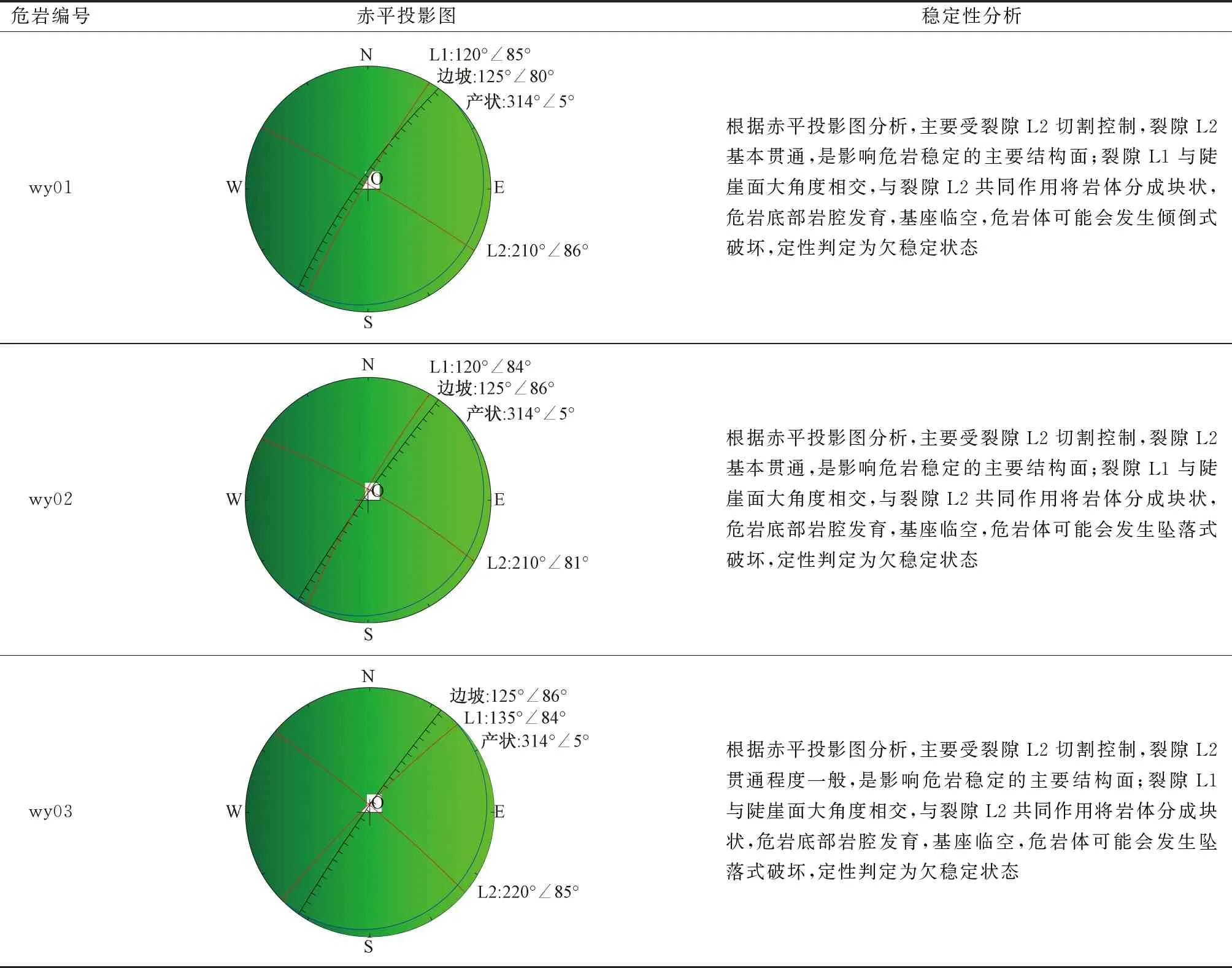
表4 赤平投影圖定性分析
(2)利用MATLAB圖像識別技術,運用圖像識別中的灰度增強、邊緣檢測、霍夫變換等方法,識別出危巖體中發育的結構面等信息。并運用前期基于無人機調查提供的坐標等基礎數據運用空間三點法計算出結構面產狀,并實現結構面信息的快速提取。
(3)基于圖像識別獲取的結構面信息,結合收集的資料,采用赤平投影法對B3段危巖帶中的3個典型危巖體進行穩定性評價,發現危巖體中普遍發育有兩組結構面,其中主控結構面的產狀較為相近,傾角較陡。危巖破壞模式主要為墜落式和傾倒式。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50
