旋轉空化器中減速板作用的數值仿真研究
2021-05-14 08:27:00姚立明趙孟石鄭智穎姚鴻賓李大尉
節能技術 2021年2期
關鍵詞:模型
姚立明,趙孟石,李 倩,鄭智穎,姚鴻賓,李大尉,裴 禹
(1.黑龍江省科學院高技術研究院 機電技術研究室,黑龍江 哈爾濱 150020;2.哈爾濱對俄高端技術轉移孵化中心,黑龍江 哈爾濱 150028;3.東北電力大學 能源與動力工程學院,吉林 吉林 132012;4.哈爾濱工業大學 能源科學與工程學院,黑龍江 哈爾濱 150001)
0 引言
在水下高速運動的物體,由于壓力低于流體的飽和蒸汽壓力,從而發生相變產生空化,而形成超空泡[1]。超空泡具有廣泛的用途,一方面采用產生的超空泡覆蓋航行體的表面,減少壁面與水的接觸,從而實現了水下航行體的減阻,其典型應用之一是俄羅斯的暴風雪號超空泡魚雷[2]。近年來,隨著研究的深入,超空泡在更廣泛的領域得到了應用。利用超空泡表面高效的氣液相變特性,超空泡被應用在海水淡化領域,用來代替多級閃蒸等傳統的相變方法[3-4]。此外,利用超空泡形成和潰滅過程中產生的局部高溫高壓的特點,將超空泡用于溶液的殺菌[5]。在傳統研究中,超空泡一般通過高速來流沖擊或高速射彈產生[6]。前者需要借助龐大的循環水洞實驗系統才能進行實驗[7],而且都需要通過通氣才能形成穩定的超空泡。后者則只是一種形成短暫超空泡的方法,無法獲得持續穩定的超空泡[8],更難以對形成的超空泡進行相關測量和應用。而通過旋轉機械產生的旋轉超空泡是一種新提出的產生超空泡的方法[9],能在很小的空間內產生持續穩定的超空泡,具有系統體積小,操作簡單,容易控制和利用等優勢,非常有利于超空泡的產生與應用。
旋轉超空泡以其獨特的優勢,具有非常廣泛的應用前景。而目前對于旋轉空化器的研究還比較少,只個別團隊對特定設計的雙葉片旋轉空化器進行了研究[3-4]。已有的研究表明,旋轉空化器轉速需要達到5 000 rpm,才能得到較大體積的超空泡[4]。這對動力電機的要求較高,消耗的功率也較大,同時旋轉葉片的穩定性和振動等問題也更加難以控制。已有的研究都是將旋轉葉片放置在一個圓柱形流體域中轉動,從研究結果來看,旋轉葉片在高速轉動過程中,帶動液體轉動的速度也較快,從而使得葉片與流體之間的相對速度并不高。為了增大葉片與流體之間的相對速度,本文提出了一種帶減速板的旋轉空化器,并通過數值模擬的方法對減速板對旋轉超空泡的影響進行了研究,歸納總結出其工作特征和規律。
1 幾何模型與網格劃分
所設計的旋轉空化器為四葉片型,如圖1所示,四個葉片呈90°分布。葉片為等截面積的三角錐行,錐角為45°。已有研究表明,該錐角為獲得超空泡的最佳錐角[3-4]。減速板設計為兩片呈180°分布的平板,位于旋轉葉片的一側,固定在容器內部,不隨旋葉片轉動。
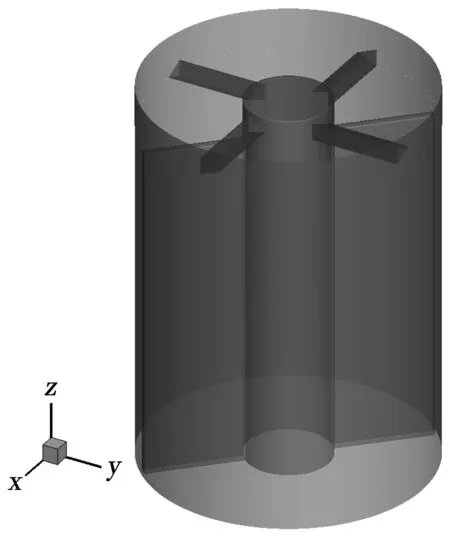
圖1 減速板型空化器幾何模型及尺寸
網格劃分分兩部分進行,旋轉葉片所在的頂部流域為旋轉流域,減速板所在的底部流域為靜止流域。選取頂部高度150 mm圓柱段內的流域為旋轉流域,其下方部分為靜止流域,兩者通過interface相連接。采用結構化網格對所設計的旋轉空化器進行網格劃分,如圖2所示。網格均為六面體網格,同時在葉片表面采用邊界層網格進行加密,以達到對計算y+的要求,總網格數為1 070萬。網格大小與文獻中網格尺寸基本一致[3-4],數值模擬方法與工具也與文獻中所用一致,文獻中已經進行了網格無關性驗證,網格尺寸已經滿足計算精度要求。
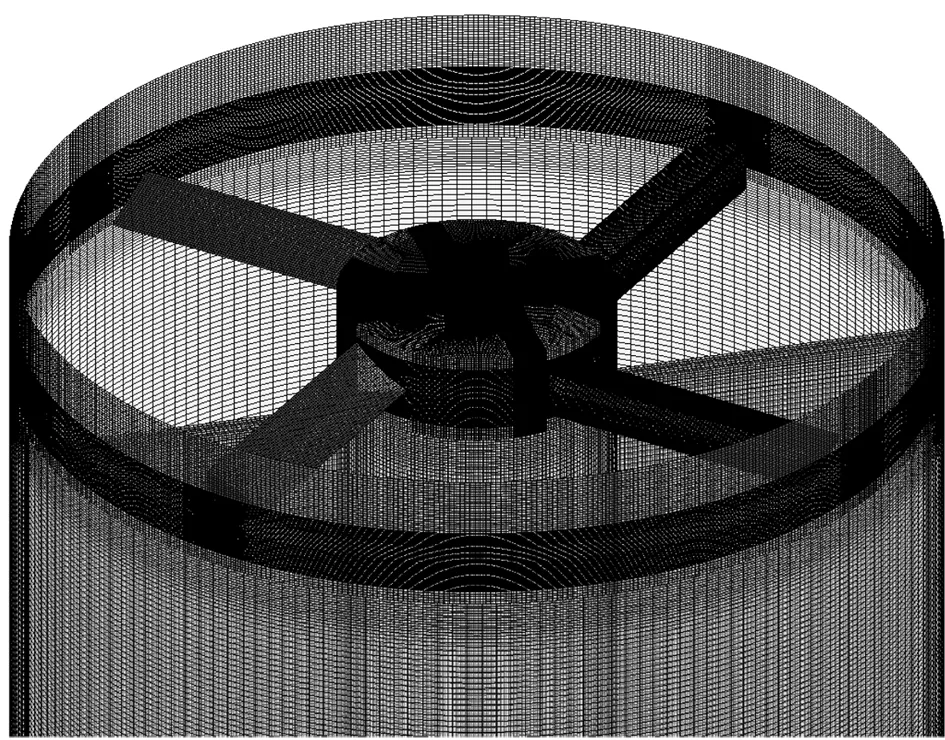
圖2 空化器及減速板網格劃分
2 數值計算模型
模擬采用FLUENT軟件,選取基于壓力的求解器,壓力與速度采用SIMPLEC方法解耦,湍流模型采用RNGk-ε模型及scalable壁面函數。
在超空泡流動的模擬中,需要通過多相流模型來控制復雜的氣液兩相流動。本文采用基于均勻平衡多相流理論的混合模型,多相流模型采用Mixture模型,其控制方程為:
混合相連續性方程
(1)
混合相動量方程
(2)
氣相輸運方程

(3)
式中ρm——混合相密度;
αv——氣相體積分數;
ρv——氣相密度;
Re和Rc——氣相生成率和氣相凝結率。
空化模型采用Schnerr-Sauer模型:
當pv≥p時
但我們更應該看到,與世界集成電路發達國家的水平相比,我國集成電路產業發展中仍然存在著較大的問題,集中表現在:
(4)
當pv≤p時
(5)
式中ρl——液相密度;
pv——飽和蒸汽壓;
n——液體單位體積中的微小氣泡數,其值為1×1013;
RB——氣泡半徑,該空化模型中其定義式為:
(6)
在模擬過程中,采用常溫下的物性參數,飽和蒸汽壓pv為3 169 Pa。為了保證模擬的穩定性,上頂面邊界條件設置為壓力出口,設定壓力為標準大氣壓,這樣可以使計算域環境壓力保持穩定。通過設定不同葉片旋轉速度,模擬不同轉速下空泡形成情況,并對結果進行總結分析。
3 仿真結果及分析
在數值模擬過程中,采用不同的轉速進行模擬計算。模擬中模擬了750 rpm、1 000 rpm、1 250 rpm、1 500 rpm、1 750 rpm和2 000 rpm等轉速,得到了不同轉速下超空泡的演變規律。
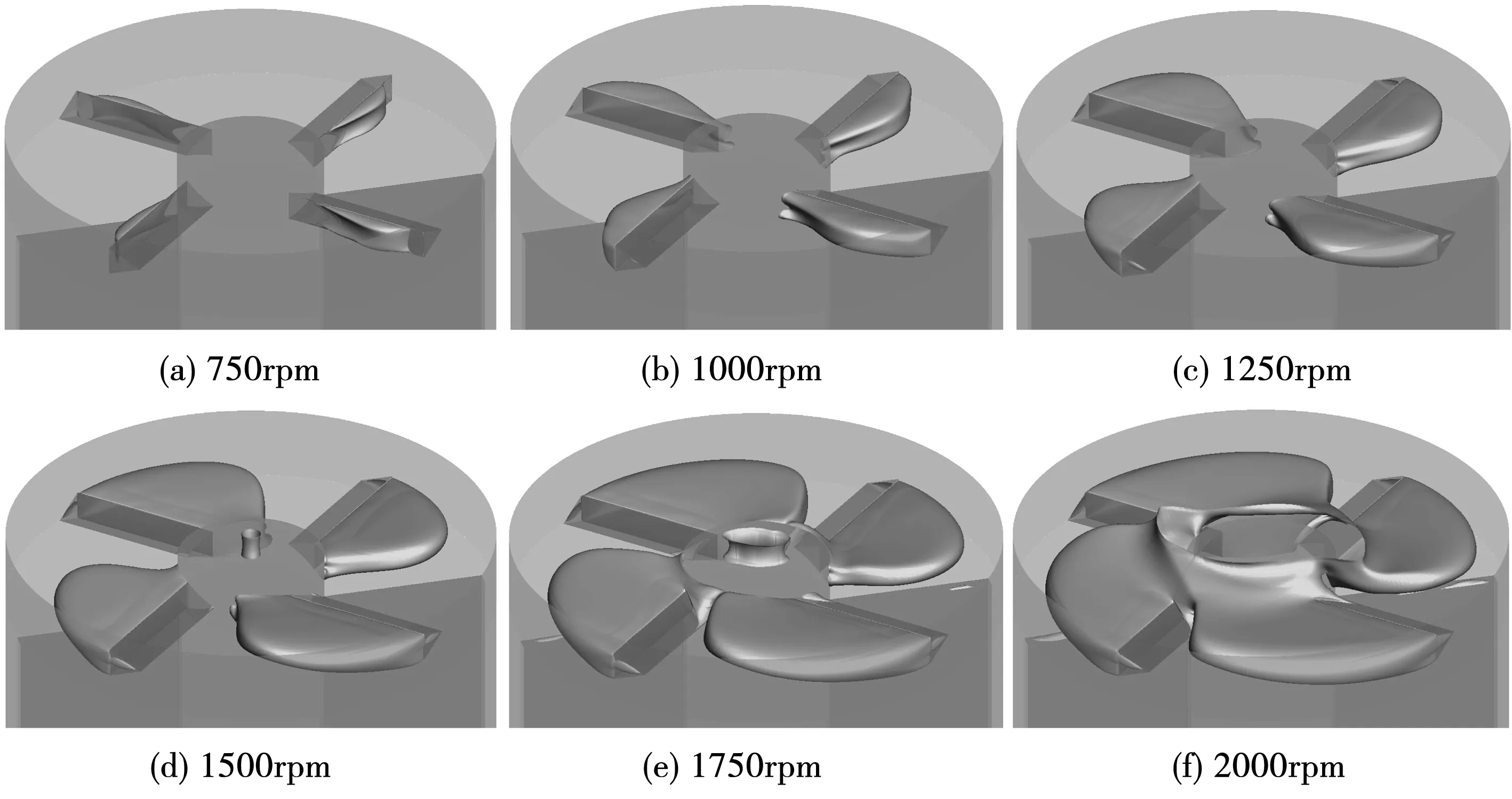
圖3 不同轉速下超空泡形狀
從圖中可以看出,隨著轉速的提高,旋轉空化器后的超空泡體積逐漸增大。在750 rpm轉速下,超空泡剛剛覆蓋住葉片的后沿,并在空泡尾部呈現出明顯的凹槽。這是超空泡尾部潰滅產生的回流所造成的,此時的超空泡還是在初生階段,是剛剛形成穩定完整超空泡的階段。隨著轉速的升高,達到1 000 rpm和1 250 rpm,超空泡尺寸迅速增大,尾部的凹槽結構消失,外形也變得飽滿。在轉速進一步上升之后,達到1 500 rpm以上,產生的超空泡尺寸達到較大程度。此時相變產生氣體較多,超空泡已經不僅僅局限在旋轉葉片的后部,在旋轉軸的頂部也出現了空泡,并隨著轉速的升高而不斷增多。當轉速達到2 000 rpm時,葉片軸頂部已經全部被氣體充滿了。而葉片后面形成的超空泡尾部也達到了下一個葉片的前緣,這已經是旋轉空化器所能產生穩定可控的超空泡的最大體積,該轉速可以認為是旋轉空化器穩定工作的最大轉速。如果轉速再繼續增大,前一葉片的超空泡就會覆蓋后面葉片,這樣會使得葉片表面流動受到干擾,從而影響其后面超空泡的形成。與參考文獻中模擬結果相比較[3-4],在有減速板的情況下,旋轉葉片更加容易產生超空泡,產生超空泡的轉速更低,形成超空泡的尺寸也更大。
減速板的加入能促進超空泡的形成,主要是增加了葉片與流體之間的相對速度。為了盡量起到阻滯水流的作用,葉片在旋轉過程中距離減速板的最小距離小于10 mm。在超空泡尺寸增大后,空泡范圍有可能達到減速板。為了研究減速板對超空泡的影響,圖4給出了1 500 rpm轉速下超空泡的俯視圖。從圖中可以看出,四個葉片后形成的超空泡形狀和尺寸相差不大。靠近減速板的兩個超空泡形態和遠離減速板的兩個超空泡形態幾乎一致,并沒有明顯的差別。可見,超空泡在經過減速板時,其形態受減速板影響較小。
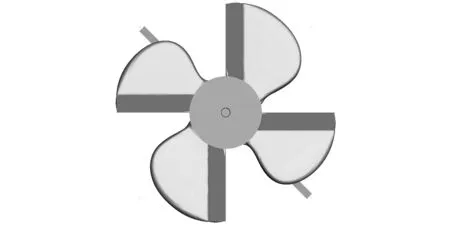
圖4 1 500 rpm轉速下超空泡分布形態俯視圖
為了研究減速板對超空泡豎直形態的影響,圖5給出了不同轉速下超空泡橫截面云圖。從圖中可以看出,超空泡受減速板的影響會朝遠離減速板方向偏移。這種偏移在很小轉速下就出現了,如圖5(a)所示,即使此時超空泡尺寸還很小。在此小轉速下,超空泡尾部可以看到明顯的內凹結構,超空泡尾部潰滅形成的射流很明顯。隨著超空泡尺寸的增大,超空泡尾部偏移的距離也更大。當旋轉葉片轉速達到穩定工作的最大轉速2 000 rpm時,可以看到前一個葉片產生的超空泡已經達到后一個葉片前緣,而此時超空泡離減速板還有較大的距離。可見,旋轉超空泡這一遠離減速板的特征恰好提高了空化器的運行穩定性,使得形成超空泡體積能更大。總之,減速板的設計在各轉速下均能安全的運行,對超空泡形態的影響較小。
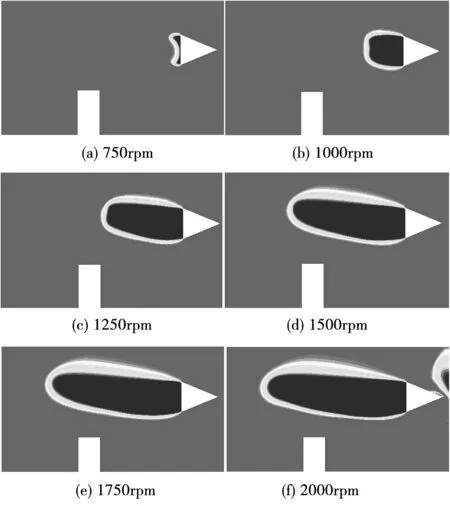
圖5 不同轉速下葉片后部超空泡形態分布
如圖6給出了不同轉速下超空泡所占旋轉區域體積分數的變化規律。旋轉區域為圓柱形計算域頂部150 mm范圍內的部分。相比于沒有減速板的情況[6],增加減速板后,產生空泡的轉速明顯要低很多,在800 rpm轉速下即產生了空化,產生的空泡體積也得到了顯著的增大。而沒有減速板的情況下,轉速要達到3 500 rpm才能產生空化。
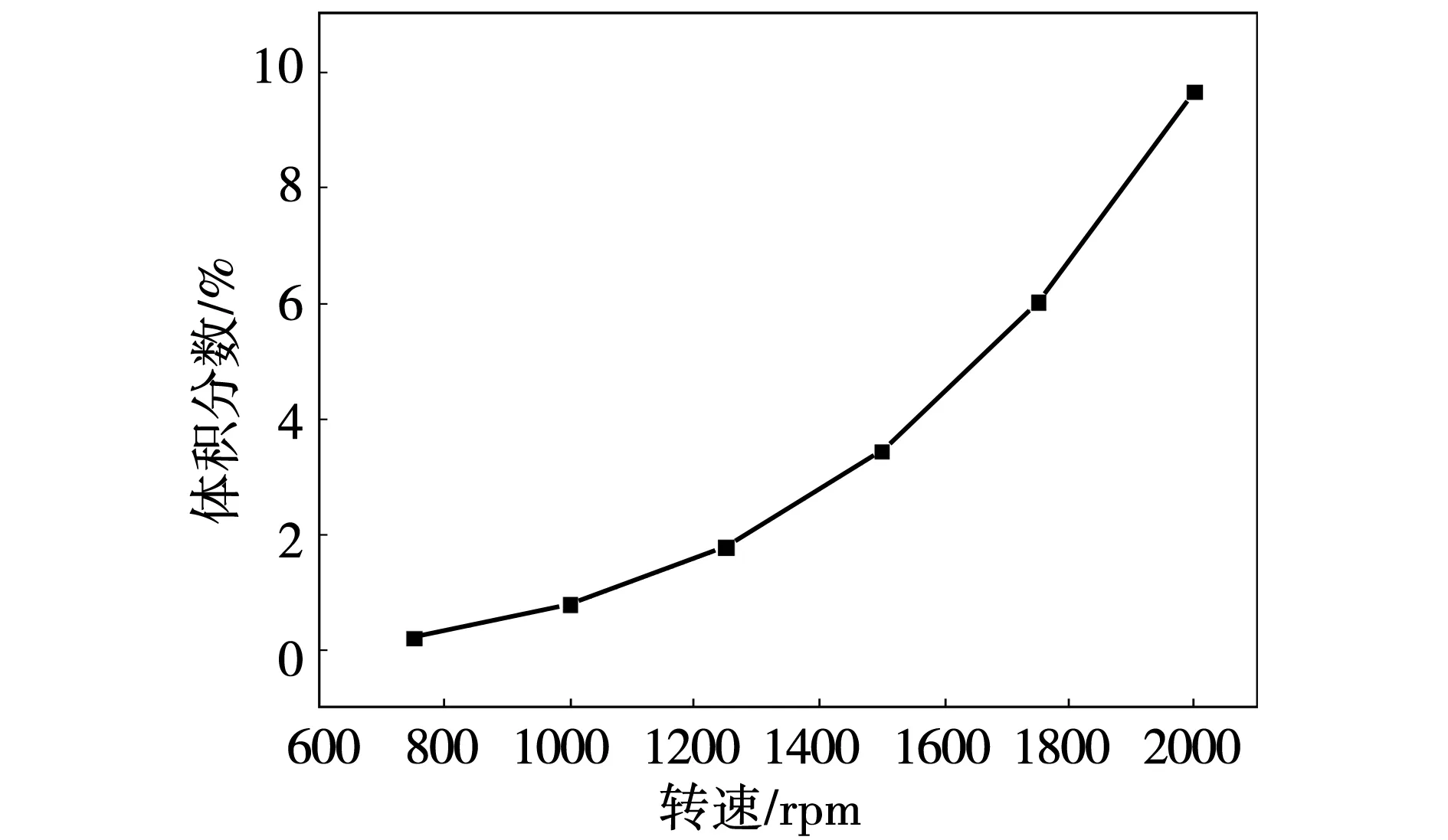
圖6 不同轉速下超空泡體積分數
從圖中可知,隨著轉速的增加,超空泡體積呈指數增長。可見,提高轉速對增大超空泡尺寸具有非常明顯的效果。但是,最高轉速受超空泡尺寸的影響,超空泡不能干涉到下游葉片。可見,最大安全轉速是帶減速板旋轉空化器設計的關鍵參數之一,而運轉速度越接近安全轉速,產生的超空泡尺寸越大。在最大安全轉速下,旋轉空化器能產生的最大超空泡體積約為旋轉區域體積的10%。最大超空泡體積也將是旋轉空化器設計和應用過程中的一個重要參考參數,實際設計過程中,產生超空泡的體積應該低于該值。
4 總結
本文針對帶減速板旋轉空化器產生超空泡的特征進行了數值模擬研究。通過三維建模軟件,建立其四葉片的旋轉空化器模型。采用結構化網格,對旋轉空化器計算域進行網格劃分。模擬了750~2 000 rpm轉速范圍內旋轉空化器形成的超空泡。并對旋轉空化器形成超空泡的形態特征進行了分析,得到結果如下:
(1)減速板的加入能明顯促進超空泡的形成,使得產生超空泡的轉速大幅降低,形成超空泡的尺寸顯著增大。
(2)減速板的加入對超空泡形態的影響較小,超空泡形態與距離減速板遠近無關,超空泡只會在豎直方向上偏向于遠離減速板,這一特性有利于減小減速板的影響,使得超空泡有更大的形成空間。
(3)旋轉空化器所形成的超空泡體積隨轉速呈指數增長,在最大安全轉速下達到最大體積分數,約為旋轉區域體積的10%,即該帶減速板旋轉空化器所能產生的最大超空泡體積。
總體來說,減速板對旋轉空化器形成的超空泡具有非常重要的意義與價值,其能促進超空泡的形成,而對超空泡形態影響很小。這些規律可以應用在旋轉空化器的改進和設計中,可見,模擬得到的結果對旋轉空化器的設計和應用具有重要的指導作用。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
