基于Mesh 網(wǎng)絡(luò)和深度學(xué)習(xí)的城市智慧停車
2021-05-12 03:00:06劉文鹍李迪解曉凡
電子設(shè)計(jì)工程 2021年8期
劉文鹍,李迪,解曉凡
(南京智騁致想電子科技有限公司,江蘇南京 210000)
這些年我國(guó)城市建設(shè)高速發(fā)展,在提高城市居民生活質(zhì)量的同時(shí),也帶來(lái)了不少新問(wèn)題。比如城市里的停車問(wèn)題,以及隨之而來(lái)的一系列停車管理問(wèn)題。如何改進(jìn)現(xiàn)有的技術(shù)與管理方式,提高管理效率并節(jié)約成本,一直是一大熱點(diǎn)話題。文中系統(tǒng)通過(guò)引入物聯(lián)網(wǎng),并輔以人工智能等技術(shù),使停車管理系統(tǒng)更加智能化,更加低成本。同時(shí)無(wú)人工干預(yù)、車輛進(jìn)出時(shí)無(wú)需取卡和讀卡的操作方式,縮短了車輛在停車場(chǎng)進(jìn)出口及道路上的滯留時(shí)間。各停車場(chǎng)的數(shù)據(jù)信息對(duì)于城市管理部門而言,還可以進(jìn)一步完善城市車輛綜合管理大數(shù)據(jù),提高城市公共資源運(yùn)行效率[1-2]。
1 系統(tǒng)設(shè)計(jì)思路
1.1 系統(tǒng)組成
文中系統(tǒng)的核心是利用Mesh 網(wǎng)絡(luò)來(lái)連接停車場(chǎng)內(nèi)不同的終端監(jiān)測(cè)設(shè)備,并通過(guò)設(shè)備內(nèi)的攝像頭模塊抓拍現(xiàn)場(chǎng)照片,之后,照片用于識(shí)別車輛的停放。這樣可以減少人工干預(yù),提高工作效率。雖然高清圖像在車位和車牌識(shí)別方面有著至關(guān)重要的作用,但是高成本的設(shè)備及有限的無(wú)線網(wǎng)絡(luò)帶寬,不適合在現(xiàn)場(chǎng)采集和傳輸高分辨率的照片。相比較而言,低分辨率照片的優(yōu)勢(shì)在于不過(guò)多的占用無(wú)線網(wǎng)絡(luò)資源,且設(shè)備價(jià)格便宜適于大批量部署。初始照片可通過(guò)深度學(xué)習(xí)技術(shù)在后臺(tái)將低分辨率的圖片還原成超分辨率圖片用于實(shí)際的檢測(cè)。
1.2 組網(wǎng)原理
Mesh 網(wǎng)絡(luò)又叫多跳(Multi-hop)網(wǎng)絡(luò),是無(wú)線網(wǎng)絡(luò)的一種,由眾多的節(jié)點(diǎn)組成,這些節(jié)點(diǎn)通過(guò)無(wú)線方式連接到彼此,在同一個(gè)網(wǎng)絡(luò)內(nèi)相鄰近的節(jié)點(diǎn)可以相互轉(zhuǎn)發(fā)數(shù)據(jù)。每個(gè)網(wǎng)絡(luò)中有一個(gè)網(wǎng)關(guān),用于與外部網(wǎng)絡(luò)相連接[3],如圖1 所示。Mesh 網(wǎng)絡(luò)無(wú)中心化的設(shè)計(jì),使得網(wǎng)絡(luò)中即使有部分節(jié)點(diǎn)發(fā)生故障,卻不影響整個(gè)網(wǎng)絡(luò)的運(yùn)行,同時(shí)可以節(jié)約現(xiàn)場(chǎng)的布線成本。目前,市面上有Zigbee、Lora、藍(lán)牙、Theard和Z-ware等多種基于不同頻段的成熟解決方案。
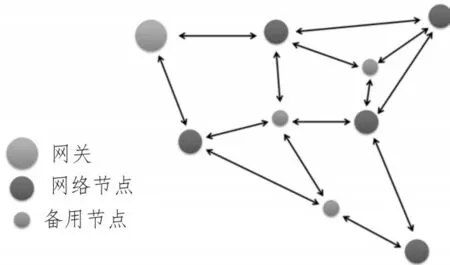
圖1 Mesh網(wǎng)絡(luò)連接圖
無(wú)線信號(hào)在傳輸?shù)倪^(guò)程中都會(huì)產(chǎn)生衰落。停車場(chǎng)環(huán)境一般比較空曠,且屬于地面視距傳播,場(chǎng)內(nèi)設(shè)備架設(shè)桿的高度又遠(yuǎn)高于所停車輛的高度,可以認(rèn)為其傳播環(huán)境類似于理想的自由空間傳播。式(1)為自由空間傳播模型。式(1)中,L是損耗因子,λ是無(wú)線信號(hào)波長(zhǎng),Gt和Gr分別是發(fā)射端天線增益和接收端天線增益。路徑損耗PL為發(fā)射功率Pt與接收功率Pr之間的比值如式(2)所示,其中信號(hào)的頻率fc=c/λ,c為光速,d和fc的單位分別為km 與MHz[4-5]。
除此之外,設(shè)備之間還存在信號(hào)的反射路徑(通過(guò)車頂或是地面)和一些信號(hào)干擾。但是停車場(chǎng)內(nèi)設(shè)備位置固定不會(huì)移動(dòng),傳輸路徑相對(duì)穩(wěn)定,影響信號(hào)強(qiáng)度的主要因素還是節(jié)點(diǎn)間的距離。
文中系統(tǒng)部署思路是在網(wǎng)絡(luò)中優(yōu)先選擇可覆蓋流量最大、實(shí)際覆蓋半徑最小的節(jié)點(diǎn),作為網(wǎng)絡(luò)中的關(guān)鍵節(jié)點(diǎn)。不斷更新網(wǎng)絡(luò)中所有節(jié)點(diǎn)的剩余帶寬和已部署節(jié)點(diǎn)的最小跳數(shù),再統(tǒng)計(jì)關(guān)鍵節(jié)點(diǎn)的最短路徑與節(jié)點(diǎn)可覆蓋需求,反復(fù)調(diào)整直至最佳[6]。
1.3 圖像重建
在圖片識(shí)別過(guò)程中引入深度學(xué)習(xí)算法來(lái)實(shí)現(xiàn)圖像的超分辨率重建。深度學(xué)習(xí)是機(jī)器學(xué)習(xí)領(lǐng)域中的一個(gè)研究方向,它的出現(xiàn)進(jìn)一步推動(dòng)了人工智能(AI)的發(fā)展。
以往傳統(tǒng)方法是從圖像表層特征進(jìn)行推測(cè),通過(guò)插值算法擴(kuò)大圖片尺寸和分辨率,這種方法在提高PSNR值(Peak Singnal-to-Noise Ratil,峰值信噪比)上效果顯著。但重建之后的圖片與真正的高清圖片相比,還是有些“失真”。
式(3)中,MSE(Mean Square Error)表示當(dāng)前圖像和參考圖像的均方誤差,n為每像素的比特?cái)?shù),一般的灰度圖像取8,即像素灰階數(shù)為256。PSNR的單位是db,數(shù)值越大越好。

文中采用基于GAN(Generative Adversarial Network 生成對(duì)抗網(wǎng)絡(luò))的超分辨率重建方法,通過(guò)大規(guī)模的GPU 訓(xùn)練,不僅可以得到一個(gè)更高的PSNR結(jié)果,同時(shí)重建之后的圖像也與真實(shí)物體更接近。模型訓(xùn)練流程如下:先降低原始高清圖片集合a 的分辨率,生成新圖片集合b,構(gòu)成訓(xùn)練集;然后,建立生成器與判別器組成的二級(jí)深度學(xué)習(xí)模型;通過(guò)生成器將圖片b 超分辨率重建為圖片c,同時(shí)結(jié)合a 和c 訓(xùn)練判別器進(jìn)行重建損失判定;通過(guò)生成器與判別器的交替迭代訓(xùn)練,使網(wǎng)絡(luò)模型逐步提升超分辨率重建性能;通過(guò)PSNR等方法比較圖片a 與圖片c,驗(yàn)證超分辨率重建的效果。反復(fù)執(zhí)行直到得到滿意結(jié)果[7]。
在圖像重建過(guò)程中,加載訓(xùn)練好的模型權(quán)重,輸入一個(gè)尺寸f×f大小的低質(zhì)量圖片,然后進(jìn)行n層卷積運(yùn)算生成超分辨率圖像。在處理階段,根據(jù)提取的圖像特征通過(guò)特征信道之間的相互依賴性來(lái)自適應(yīng)地調(diào)整信道特征,以達(dá)到恢復(fù)更多細(xì)節(jié)的目的[8],再按照信道的前后順序以及卷積核的大小,對(duì)每個(gè)特征值在輸出圖片上的位置進(jìn)行重新排列,得到最終超分辨率圖片,如圖2 所示。
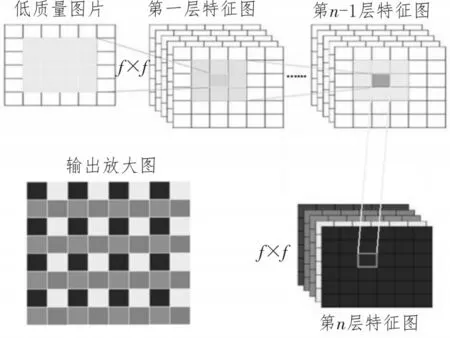
圖2 超分辨率圖像重建
在實(shí)際應(yīng)用中,將現(xiàn)場(chǎng)上傳的圖片進(jìn)行超分辨率圖片重建后,再進(jìn)行下一步的車輛和車牌識(shí)別工作,具體流程如圖3 所示。
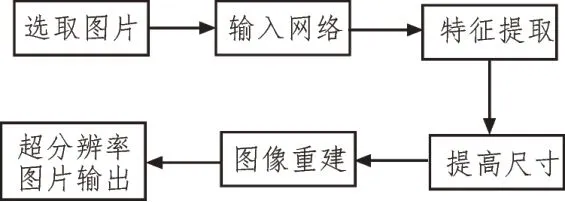
圖3 超分辨率圖片處理流程
1.4 系統(tǒng)工作流程
現(xiàn)場(chǎng)終端設(shè)備按時(shí)抓拍照片并上傳后臺(tái)。圖片分包后的數(shù)據(jù)通過(guò)Mesh 網(wǎng)絡(luò)依次發(fā)送到網(wǎng)關(guān),再通過(guò)網(wǎng)關(guān)連接到外網(wǎng)(主要為光纖網(wǎng)絡(luò)、4/5G 網(wǎng)絡(luò))向下一層傳輸。當(dāng)原始的低分辨率照片上傳至后臺(tái)以后,進(jìn)行圖像超分辨率重建,處理后的圖片用于車輛和車牌的識(shí)別。后臺(tái)通過(guò)這些照片判斷停車位上是否有車,針對(duì)車輛的識(shí)別采用邊緣檢測(cè)算法及Hough 直線檢測(cè)算法,依據(jù)分割好的車位,通過(guò)檢測(cè)來(lái)確定車輛的停放[9]。
2 系統(tǒng)測(cè)試
測(cè)試設(shè)備主要由網(wǎng)絡(luò)節(jié)點(diǎn)、攝像頭模塊、單片機(jī)開(kāi)發(fā)板和后臺(tái)圖片處理部分組成,其中攝像頭模塊和單片機(jī)開(kāi)發(fā)板構(gòu)成下位機(jī)部分,上位機(jī)為后臺(tái)圖片處理部分。為了便于完成測(cè)試,多采用已有的硬件設(shè)備來(lái)完成測(cè)試平臺(tái)的搭建。結(jié)構(gòu)連接如圖4所示。
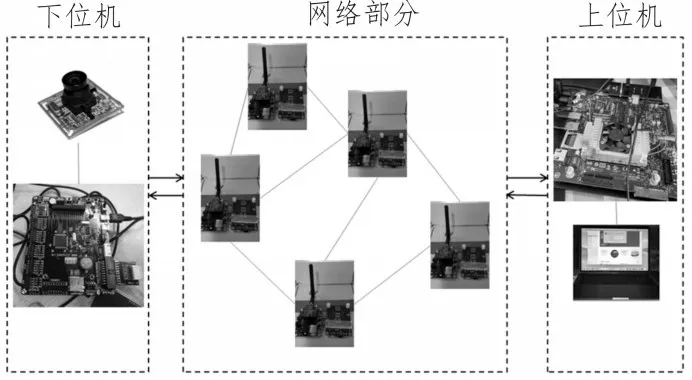
圖4 硬件結(jié)構(gòu)連接
目前市面上廣泛使用的組網(wǎng)方案有Zigbee 和Lora。測(cè)試中選作網(wǎng)絡(luò)節(jié)點(diǎn)的是基于TI CC2530芯片的Zigbee 模塊,工作頻段2.4 GHz,該頻段免費(fèi)且模塊自帶相應(yīng)的組網(wǎng)協(xié)議,較容易實(shí)現(xiàn)組網(wǎng)功能[10]。綜合文中1.2 節(jié)組網(wǎng)原理中的內(nèi)容以及一些現(xiàn)場(chǎng)經(jīng)驗(yàn),測(cè)試時(shí)網(wǎng)絡(luò)中的關(guān)鍵節(jié)點(diǎn)鋪設(shè)間距在50 m 以內(nèi),除此之外,還部署了一定數(shù)量的備用節(jié)點(diǎn)來(lái)增加網(wǎng)絡(luò)冗余,提高網(wǎng)絡(luò)的魯棒性。模塊背部自帶電池盒,可以使用7 號(hào)電池供電,方便現(xiàn)場(chǎng)部署。后續(xù)產(chǎn)品可以考慮使用太陽(yáng)能來(lái)為網(wǎng)絡(luò)節(jié)點(diǎn)供電,這樣既方便又環(huán)保。
攝像頭模塊采用RS232 接口與單片機(jī)開(kāi)發(fā)板相連接。考慮到照片過(guò)大會(huì)導(dǎo)致數(shù)據(jù)分包過(guò)多,影響傳輸效率甚至造成網(wǎng)絡(luò)阻塞。所以,攝像頭模塊抓拍的照片是規(guī)格在640×480 像素(30 萬(wàn)像素)的低分辨率照片,大約30~40 K。現(xiàn)在一般停車再加上下車時(shí)間大約需要3~8 分鐘,且很多停車場(chǎng)采用每15 分鐘做一次計(jì)費(fèi)統(tǒng)計(jì),再綜合考慮無(wú)線網(wǎng)絡(luò)的傳輸帶寬,上傳照片的時(shí)間間隔定為每5 分鐘一次。
測(cè)試中控制部分采用單片機(jī)的開(kāi)發(fā)板基于STM32F103VET6 芯片,該芯片內(nèi)核采用ARM Cortex-M3 架構(gòu),性能較強(qiáng)。由于圖片處理部分都放在了后臺(tái),下位機(jī)只負(fù)責(zé)控制節(jié)點(diǎn)和攝像頭模塊。在后續(xù)實(shí)際的產(chǎn)品中,下位機(jī)設(shè)備可采用性能較低、價(jià)格更便宜的芯片。
后臺(tái)部分由PC端和NVIDIA的Jetson TX2嵌入式平臺(tái)組成,用以實(shí)現(xiàn)圖片的超分辨重建和車輛的識(shí)別。PC 端基于Caffe 框架進(jìn)行模型訓(xùn)練與性能測(cè)試,再通過(guò)訓(xùn)練好的模型進(jìn)行圖片的還原。將之前經(jīng)過(guò)一系列處理得到的圖片發(fā)送給TX2 嵌入式平臺(tái),再使用Yolo V2 檢測(cè)算法對(duì)圖片進(jìn)行檢測(cè),得到車輛的輪廓信息[11]。通過(guò)實(shí)驗(yàn),現(xiàn)場(chǎng)檢測(cè)效果如圖5 所示。
3 未來(lái)展望
文中系統(tǒng)今后還需進(jìn)一步完善,增加車牌識(shí)別和手機(jī)APP 等功能。
車牌識(shí)別功能會(huì)在后臺(tái)判斷有車輛停放后,進(jìn)一步識(shí)別所停位置車輛的車牌號(hào)碼并開(kāi)始收費(fèi)計(jì)時(shí)[12-13],在車輛離開(kāi)時(shí)統(tǒng)計(jì)停車時(shí)間,作為停車的收費(fèi)依據(jù)。
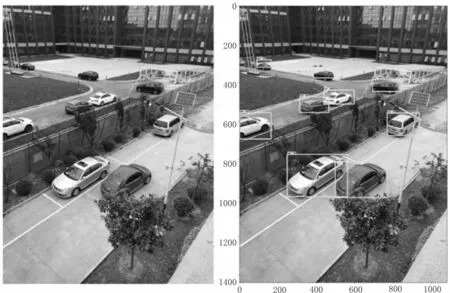
圖5 車輛識(shí)別效果圖
系統(tǒng)配合相應(yīng)的手機(jī)APP 和客戶端軟件后,可以做到停車場(chǎng)無(wú)人值守、手機(jī)端車輛圖片實(shí)時(shí)查看、手機(jī)端自動(dòng)扣費(fèi)、輔助找車等功能。在提高效率的同時(shí)也大大地降低了停車場(chǎng)的運(yùn)營(yíng)成本。只需少量的工作人員,就可以同時(shí)覆蓋多個(gè)不相連接的停車區(qū)域,屏幕前的觀測(cè)人員加上在外巡視人員作為輔助并處理突發(fā)事件。同時(shí)對(duì)于區(qū)域內(nèi)垃圾亂放和違法占用消防應(yīng)急車道,也可以通過(guò)后臺(tái)系統(tǒng)對(duì)現(xiàn)場(chǎng)照片的識(shí)別發(fā)出預(yù)警,再通過(guò)巡視人員做出及時(shí)處理[14-15]。
除此之外,還可以通過(guò)ETC 與停車業(yè)務(wù)的深度融合,實(shí)現(xiàn)智慧停車+ETC 支付的業(yè)務(wù)整合。目前,隨著全國(guó)范圍內(nèi)各大銀行大力推廣車載ETC 設(shè)備,ETC 系統(tǒng)已成為車輛獨(dú)一無(wú)二的電子標(biāo)簽。現(xiàn)場(chǎng)設(shè)備通過(guò)增加相應(yīng)的ETC 識(shí)別模塊,可以準(zhǔn)確識(shí)別區(qū)域范圍內(nèi)的車輛,并現(xiàn)場(chǎng)完成扣費(fèi)工作。同時(shí),停車場(chǎng)的數(shù)據(jù)信息可與其他平臺(tái)相對(duì)接,完善城市車輛大數(shù)據(jù)的綜合管理[16]。
4 結(jié)束語(yǔ)
文中系統(tǒng)的智慧停車應(yīng)用基于Mesh 網(wǎng)絡(luò),通過(guò)融合物聯(lián)網(wǎng)、人工智能和大數(shù)據(jù)等當(dāng)下熱點(diǎn)技術(shù),集高效監(jiān)控、低成本運(yùn)營(yíng)和精細(xì)化管理于一體。今后終端設(shè)備配合太陽(yáng)能供電以及微環(huán)境監(jiān)測(cè)傳感器,可以廣泛地應(yīng)用于智慧城市等新興項(xiàng)目中,與未來(lái)智慧城市的發(fā)展方向一致。

- 電子設(shè)計(jì)工程的其它文章
- 基于DSP 曼徹斯特編解碼的過(guò)套管電纜通信系統(tǒng)設(shè)計(jì)
- 電力企業(yè)分級(jí)分類的分布式云存儲(chǔ)系統(tǒng)的研究與實(shí)現(xiàn)
- 基于時(shí)空大數(shù)據(jù)挖掘的網(wǎng)絡(luò)輿情研判方法研究
- 基于STC89C52 單片機(jī)的自動(dòng)換氣扇系統(tǒng)設(shè)計(jì)
- 基于WindowsCE 的電網(wǎng)大型設(shè)備運(yùn)輸狀態(tài)實(shí)時(shí)監(jiān)測(cè)系統(tǒng)設(shè)計(jì)
- 基于云安全的醫(yī)療數(shù)據(jù)信息平臺(tái)架構(gòu)與網(wǎng)絡(luò)通信方法研究