變電站智能巡檢機器人導航算法改進
2021-05-12 09:22:22周啟平郭俊凱
農村電氣化 2021年4期
周啟平,賈 蕾,何 偉,郭俊凱
(1.安徽繼遠軟件有限公司,安徽 合肥 230088;2.安徽四創電子股份有限公司,安徽 合肥 230011;3.中國電子科技集團公司第二十研究所,陜西 西安 7100683)
當前人工智能技術正在飛速發展,國內很多電力企業正在大面積推廣智能巡檢機器人應用于智能變電站、無人值守變電站等,輔助人工開展設備巡視。巡檢機器人能夠實現對變電站全天候、全方位和全自主智能巡檢,有效降低人工勞動強度,降低變電站運維成本,提升正常巡檢作業和管理的智能化水平。結合機器人技術和導航技術兩者優勢并應用到變電站巡檢業務中,克服數據準確度低、實效性差、人工巡檢效率低下等技術缺陷,真正做到變電站無人化值守,讓巡檢工作變得更加智能化[1]。自主導航技術是保證巡檢機器人在變電站內得以自主且穩定行走的關鍵,導航定位技術的精度直接決定了智能機器人在巡檢過程中能否準確抵達巡檢位置并精準完成巡檢任務,進而保障變電站電力設備的運行安全。
1 北斗衛星導航系統
1.1 北斗衛星導航系統
北斗衛星導航系統(beidou navigation satellite system, BDS)是我國自主研制的全球衛星導航系統,也是繼美國GPS、俄羅斯GLONASS 之后的第三個成熟的衛星導航系統。2020年6月23日,隨著北斗三號收官之星發射升空,標志著北斗三號全球衛星導航系統星座部署全面完成,至此中國北斗邁進全球服務的新時代[2]。
北斗三號衛星導航系統由30顆衛星組成,其全球范圍定位精度優于10 m,測速精度優于0.2 m/s,授時精度優于20 ns。BDS系統可以全天候為用戶提供可靠的導航、定位、授時服務,并可提供最高14000 bit(1000 個漢字)雙向短報文通信服務,有效解決了海域及偏遠地區數據通信的難題[3]。
BDS 系統具有3 大明顯特點:空間段采用3 種軌道衛星組成的混合星座,擁有較多數量的高軌衛星,能有效地對抗外界干擾信號遮擋,特別是在低緯度地區效果更加顯著;提供多頻點導航信號,可通過多頻信號組合使用等方式提高服務精度;創新融合了導航與通信能力,擁有定位導航授時、地基增強、星基增強、精密單點定位、短報文通信和國際搜救等多種服務能力[4]。
1.2 電力北斗地基增強系統
北斗地基增強系統是實現北斗衛星導航系統高精度定位、導航、授時的重要基礎設施。用戶通過高精度接收終端,借助網絡或無線電通信等手段接收來自數據中心播發的定位信號,從而得到高精度定位結果,定位精度可提升至厘米級,甚至毫米級(后處理)[5]。
電力系統由于其運維、檢修、調度、基建和營銷等多個業務領域對高精度授時和導航定位等有廣泛的需求,而且電力系統由于其自身特性,設備覆蓋地區廣,對信息安全要求高,因此建設電力北斗地基增強系統成為電力部門的迫切需求[6]。電力北斗地基增強系統主要由基準站網、通信傳輸網絡、數據綜合處理中心、應用終端等構成[7],如圖1 所示。
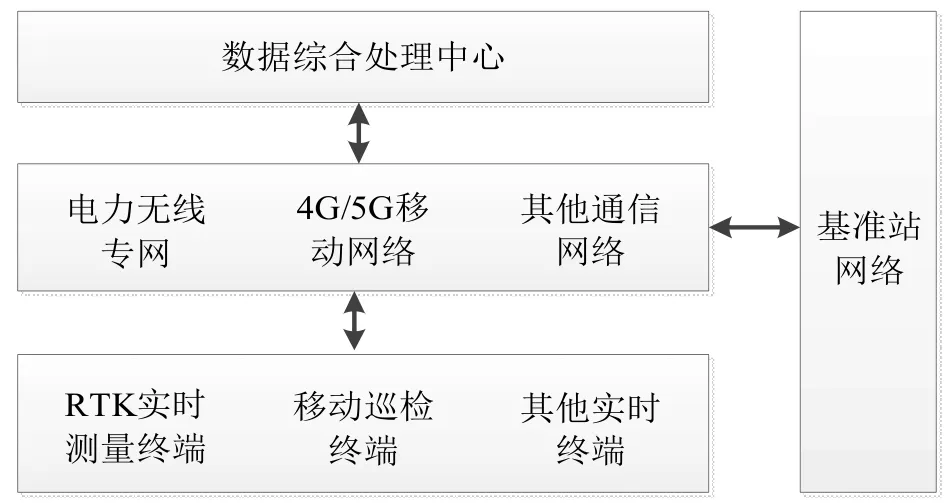
圖1 電力北斗地基增強系統架構
2019年12月,山東省電力北斗地基增強系統已建成投入使用,并成功應用到無人機巡檢和基于高精度定位的人員安全管控項目中,標志著電力北斗地基增強系統正式啟用[8]。
2 機器人常用自主導航技術
自主導航技術是變電站巡檢機器人的“智能化”進程中最基礎最核心的底層應用技術。目前,變電站智能巡檢機器人常用導航方式包括GPS導航、磁軌跡導航、視覺導航、激光雷達導航和慣性導航等。
2.1 GPS導航
全球定位系統包括空間衛星系統、地面控制網和用戶接收系統3 大部分[9],GPS 導航應用較為廣泛,差分GPS 系統定位精度可達1~2 cm,但受政治因素影響,其安全性不高,存在隨時被關停的風險,且由于高精度GPS定位模塊成本高,導致系統無法普及應用。
2.2 磁軌跡導航
磁軌跡導航是一種技術非常成熟的導航方式,通過預先在變電站地面鋪設磁軌道或RFID標簽進行精確定位和導航,具有精度高、抗干擾能力強等優點,但也存在投資成本高、靈活性差,鋪設工程量大、擴建不便等缺點,目前巡檢機器人導航基本已不采用該方式[10]。
2.3 視覺導航
巡檢機器人通過高性能相機采集巡檢區域圖像信息并進行數字化處理并與機器學習系統中的圖像樣本庫進行比對分析,從而得到機器人當前所處位置來實現導航定位[11]。視覺導航方式能夠識別設備、道路、劃線及障礙物,其成本低、靈活性高,但其計算量大,對機器人硬件要求較高,且受變電站復雜環境影響較大,定位精度不高。
2.4 激光雷達導航
激光雷達導航是近年來巡檢機器人最常用的導航方式,巡檢機器人通過激光雷達對周圍目標進行掃描,從而獲取目標物上全部目標點的數據,對這些數據成像處理后,精確生成目標物的三維立體圖像。
同步定位與地圖構建(simultaneous localization and mapping,SLAM)技術,指機器人利用傳感器收集到的數據信息進行求解運算,實現位置姿態的定位以及獲取場景地圖信息的系統[12-13]。SLAM系統采用對不同時間的點云進行比對的方法,求解出激光雷達相對運動的長度以及姿態的變化,從而準確的獲取機器人的位置信息。激光雷達導航技術具備定位精度高、探測角度廣、響應速度快等優勢,但也存在激光雷達成本高、探測距離短等劣勢,具有一定的應用局限性。
2.5 慣性導航
慣性導航通過航位推算法將載體當前的航向和速度與上一時刻的位置相結合,推算出當前時刻的位姿,并得到載體的行駛軌跡,保證不受外界環境因素的影響[14]。但由于其誤差隨著使用時間不斷積累,因此定位精度不高,主要用于輔助導航方面。
3 基于BDS的機器人導航技術
3.1 基于BDS的機器人導航系統架構
智能巡檢機器人由機器人本體和后臺管理系統組成,機器人本體與后臺管理系統之間采用無線通信,采用WAPI 無線通信協議,機器人系統框架圖如圖2所示,主要由電源管理系統、導航定位系統、無線通信系統和控制系統等組成,控制系統由工控機和單片機組成,導航定位系統由北斗導航系統、視覺導航模塊、慣性導航模塊和超聲波避障系統組成。
機器人使用BDS系統與超聲波雷達避障系統作為導航方式,并用視覺導航作為輔助導航方式,既可以達到厘米級導航定位精度,又可以實現機器人運行過程中靈活避障。由于不使用價格高昂的激光雷達,大大降低了機器人的制造成本。
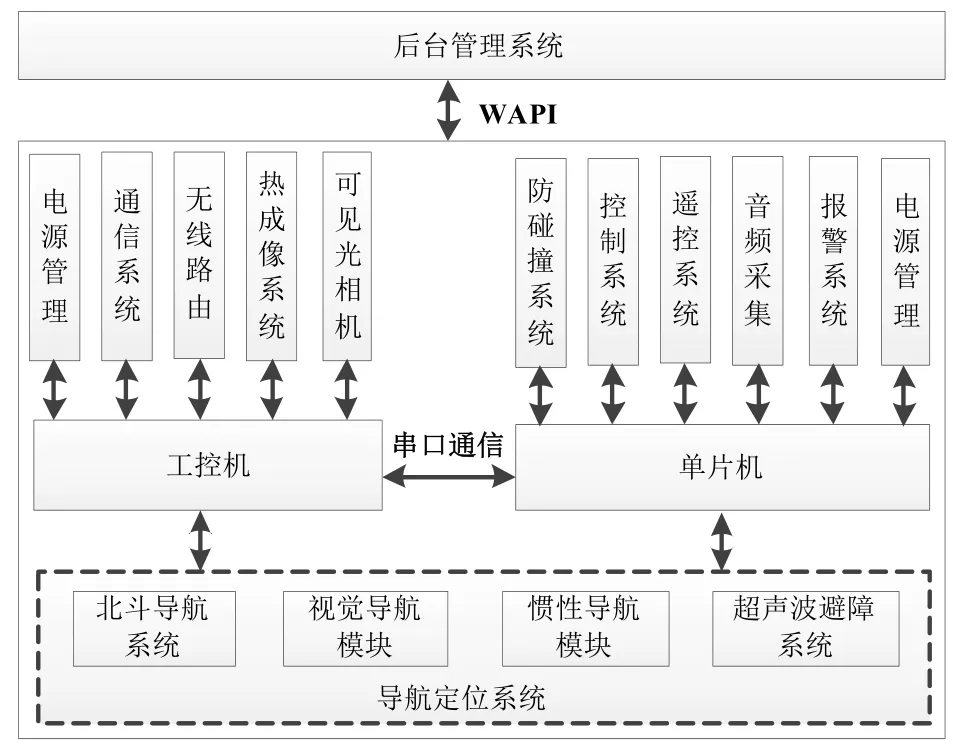
圖2 基于BDS的機器人導航系統架構
3.2 BDS地基增強基站架設
電力北斗精準服務網系統一般將數據中心設置在電網公司總部或者省公司通信機房,基站與數據綜合處理中心通過電力數據網進行通信。基站可根據地域規模進行規劃,一般設置在樞紐變電站內以節約土地成本。
由于北斗衛星導航系統提供的授時、定位、導航、短報文通信服務可靠性要求比較高,應當設置在I區或II區,并做好縱向加密、橫向隔離等網絡安全邊界防護,接收終端應當使用加密芯片并基于唯一識別認證機制加以認證。
3.3 地圖創建
通過激光掃描器、高精度北斗定位設備等建立變電站全局地圖,對變電站道路、建筑物、構筑物、設備進行標定,將各節點經緯度坐標信息儲存于數據庫中。由于變電站地勢較為平坦,全局地圖通過平面坐標系來構建,為此需要將讀取的節點數據轉換為平面坐標系,然后再通過坐標旋轉或平移等方式將其轉換為機體坐標系[15]。CGCS2000 大地坐標系轉換方法常用有高斯一克呂格算法和墨卡托投影算法,通過將橢球面三維坐標系轉換為二維坐標系。
3.4 導航控制與避障
機器人按照預設的位置坐標信息,通過BDS系統導航行駛至目標位置,在行進過程中,視覺導航系統通過可見光攝像頭提取路面及周邊設備圖像并進行分析和處理,實現路線校準以及最優路線的規劃。
在機器人行駛過程中,機器人通過前部及兩側的超聲波傳感器檢測周邊障礙物情況,同時根據機體速度判斷是否會發生碰撞,并調用相關算法對路徑進行規劃,以達到自動避開障礙物的目的。
3.5 無線通信
目前,對于變電站巡檢機器人與監控主站之間的通信,一般采用Wi-Fi 無線網橋傳輸方式,無法滿足變電站網絡的安全傳輸要求。通過可靠的通信方式是,加裝無線加密通信模塊,采用支持WAPI無線標準或230 MHz電力無線專網通信模組通信。
將BDS系統的雙向短報文通信服務作為機器人無線通信的后備通信,主要用來下達控制命令,傳輸裝置告警信息以及設備緊急重大缺陷等。對于護網、保供電、變電站內必須停用無線通信等有關情況時,通過利用BDS 短報文通信服務來傳輸信息,以確保不至于因為停用無線通信導致機器人停用。
4 實驗驗證
在某開通電力北斗地基增強系統的變電站對機器人導航定位技術進行了實驗驗證,在變電站室外設置機器人運行路線為矩形,設定矩形的4 個頂點作為定位點(A點、B 點、C 點、D點),進行50 次定位循環,并計算50次定位的定位精度平均值及標準差,得到對于每個定位點的定位精度。利用激光SLAM 技術的機器人進行定位精度測試進行對比,得到結果如表1所示。
實驗結果表明,北斗地基增強系統精度達到厘米級,盡管比激光SLAM 定位精度略低,但已經滿足變電站巡檢機器人導航需求。根據市場行情調查得知,激光雷達與高精度北斗導航模塊價格差距較為明顯,激光雷達費用是高精度北斗導航模塊4~8倍。綜合考慮定位精度和設備成本等因素,采用北斗地基增強系統定位技術進行機器人導航是更為合理的選擇。
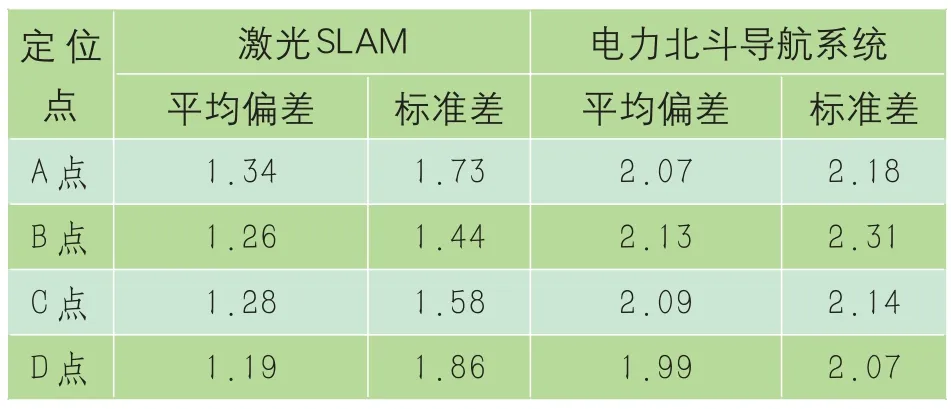
表1 定位精度實驗結果 cm
5 結束語
針對變電站巡檢機器人的導航系統,提出了一種利用北斗地基增強系統并輔以視覺導航的算法,該算法利用厘米級定位服務的北斗地基增強系統進行導航定位,輔以視覺導航系統完成對導航路線校準及最優路線規劃,實時有效地對智能巡檢機器人的運動姿態進行控制,滿足變電站智能巡檢機器人巡檢精度要求。由于不使用價格昂貴的激光雷達,節省巡檢機器人的制造成本,具有很好的應用推廣前景。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
電子制作(2018年8期)2018-06-26 06:43:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
電子制作(2017年8期)2017-06-05 09:36:15
現代工業經濟和信息化(2016年5期)2016-05-17 05:35:57
河南電力(2015年5期)2015-06-08 06:01:45
