波紋梁夾持型雙平行四邊形柔性機構(gòu)性能分析
2021-05-11 22:01:44席守治賴磊捷
智能計算機與應用 2021年2期
席守治 賴磊捷
摘要:為解決傳統(tǒng)雙平行四邊形柔性機構(gòu)中二級運動平臺欠約束問題,設計了一種波紋梁夾持型對稱雙平行四邊形柔性機構(gòu)。首先,提出了一種基于正弦曲線的波紋梁結(jié)構(gòu),并將其安裝在對稱雙平行四邊形機構(gòu)的2個二級平臺之間;其次,建立了機構(gòu)靜力學解析模型,并利用拉格朗日方程建立了動力學模型;最后,利用有限元和實驗方法對其靜、動力學性能進行了仿真和測試。結(jié)果表明:該機構(gòu)在沒有改變機構(gòu)運動剛度和一階固有頻率的情況下,對二級平臺進行了有效約束,從而提升了雙平行四邊形機構(gòu)的高階固有頻率,能夠有效改善傳統(tǒng)雙平行四邊形機構(gòu)的動力學特性和抑制振動能力。
關(guān)鍵詞:柔性機構(gòu);波紋梁;平行四邊形機構(gòu);欠約束;模態(tài)分析
【Abstract】Inordertosolvetheunder-constraintproblemofthesecondarymotionplatforminthetraditionaldoubleparallelogramflexiblemechanism,acorrugatedbeamclampingsymmetricaldoubleparallelogramflexiblemechanismisdesigned.First,acorrugatedbeamstructurebasedonasinecurveisproposedandinstalledbetweenthetwosecondaryplatformsofthesymmetricaldoubleparallelogrammechanism;secondly,ananalyticalmodelofmechanismstaticsisestablished,andadynamicmodelisestablishedusingLagrangianequations;finally,finiteelementandexperimentalmethodsareusedtosimulateandtestitsstaticanddynamicperformance.Theresultsshowthatthemechanismeffectivelyrestrainsthesecondaryplatformwithoutchangingthestiffnessofthemechanismandthefirst-orderfrequency,andimprovesthehigh-ordernaturalfrequencyofthedoubleparallelogrammechanism,therebyeffectivelyimprovingdynamiccharacteristicsandabilitytosuppressvibrationofthetraditionaldoubleparallelogrammechanism.
【Keywords】flexiblemechanism;corrugatedbeam;parallelogrammechanism;under-constraint;modalanalysis
作者簡介:席守治(1992-),男,碩士研究生,主要研究方向:柔性微納米定位技術(shù)與控制研究;賴磊捷(1986-),男,博士,副教授,主要研究方向:微位移驅(qū)動控制研究。
0引言
隨著精密加工、微電子、航空航天、生物工程等領(lǐng)域的迅速發(fā)展,基于壓電陶瓷驅(qū)動器和柔性機構(gòu)的微納米定位技術(shù)得到了廣泛應用[1]。其中,柔性機構(gòu)通過其柔性部件的彈性變形來實現(xiàn)微納米定位運動,具有裝配少、無摩擦、無間隙、無需潤滑和運動精度高等優(yōu)點,是微納米定位技術(shù)的理想選擇[2-5]。柔性機構(gòu)中,雙平行四邊形機構(gòu)具有行程大,應力小等優(yōu)點[6],現(xiàn)已成功應用在大行程微納米定位平臺中。雖然雙平行四邊形柔性模塊在其自由度方向能夠?qū)崿F(xiàn)大行程運動范圍,但由于雙平行四桿柔性機構(gòu)中的二級平臺存在與末端平臺相同的自由度,造成了二級平臺的欠約束問題[7],隨著其工作方向行程的增加,平臺約束方向的側(cè)向剛度迅速下降,并且二級平臺的高階振動同樣也會對定位平臺的控制器設計和動態(tài)性能產(chǎn)生不良影響。
為了解決上述問題,常見的方法是運用杠桿機構(gòu)強制使中間平臺和末端平臺實現(xiàn)1:2的位移比[8-9]。基于此思路,Panas等人[10]提出了在雙平行四邊形柔性機構(gòu)中嵌入梯形遠程運動中心機構(gòu)來模擬杠桿的作用,從而實現(xiàn)對末端平臺和中間平臺的運動位移進行約束。改進后的機構(gòu)中間平臺的約束方向剛度提升了134倍,并且在保證一階固有頻率基本不變的情況下,將二階諧振頻率提升了11倍。基于該類改進的雙平行四邊形機構(gòu),Roy等人[11]設計了一種行程達到50mm×50mm的二自由度柔性納米定位平臺,由于使用了內(nèi)嵌梯形機構(gòu)的雙平行四邊形柔性模塊,其二階固有頻率從25Hz提升至86Hz,而其一階諧振頻率保持在6Hz。另外,Awtar等人[1]也設計了一種夾持型對稱雙平行四邊形柔性機構(gòu),在保證運動方向剛度不變的情況下,對雙平行四邊形機構(gòu)的二級運動平臺進行了約束,提升機構(gòu)的側(cè)向剛度,有效減少了寄生位移,但由于該機構(gòu)增加了夾持部分的質(zhì)量,其一階固有頻率會有一定程度的降低。
本文提出了一種波紋梁夾持型雙平行四邊形柔性機構(gòu),該機構(gòu)能夠在保持工作方向剛度和一階固有頻率同時不變的基礎(chǔ)上,解決平行四邊形機構(gòu)二級平臺欠約束問題,同時能提高二級運動平臺引起的高階固有頻率。本文首先設計了波紋梁夾持型對稱雙平行四邊形機構(gòu)構(gòu)型,并建立了機構(gòu)的靜、動力學的解析模型,同時對其工作方向剛度和前三階固有頻率進行有限元仿真和實驗分析,驗證了所設計機構(gòu)的有效性。
1波紋梁夾持型對稱雙平行四邊形機構(gòu)
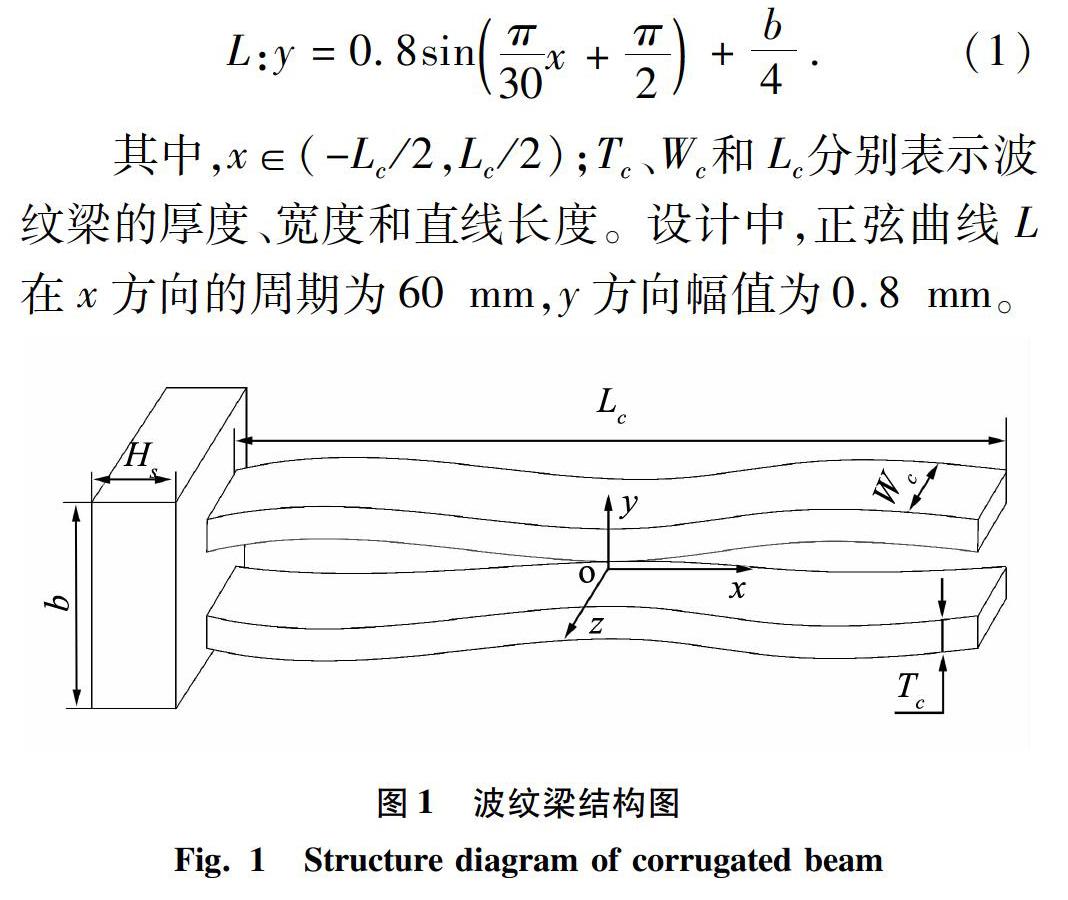
本文首先提出了波紋梁結(jié)構(gòu),如圖1所示。圖1中,紅色曲線是需要構(gòu)造的正弦曲線。參見圖1,在局部坐標系xOy中,建立正弦曲線L(單位為mm),即:
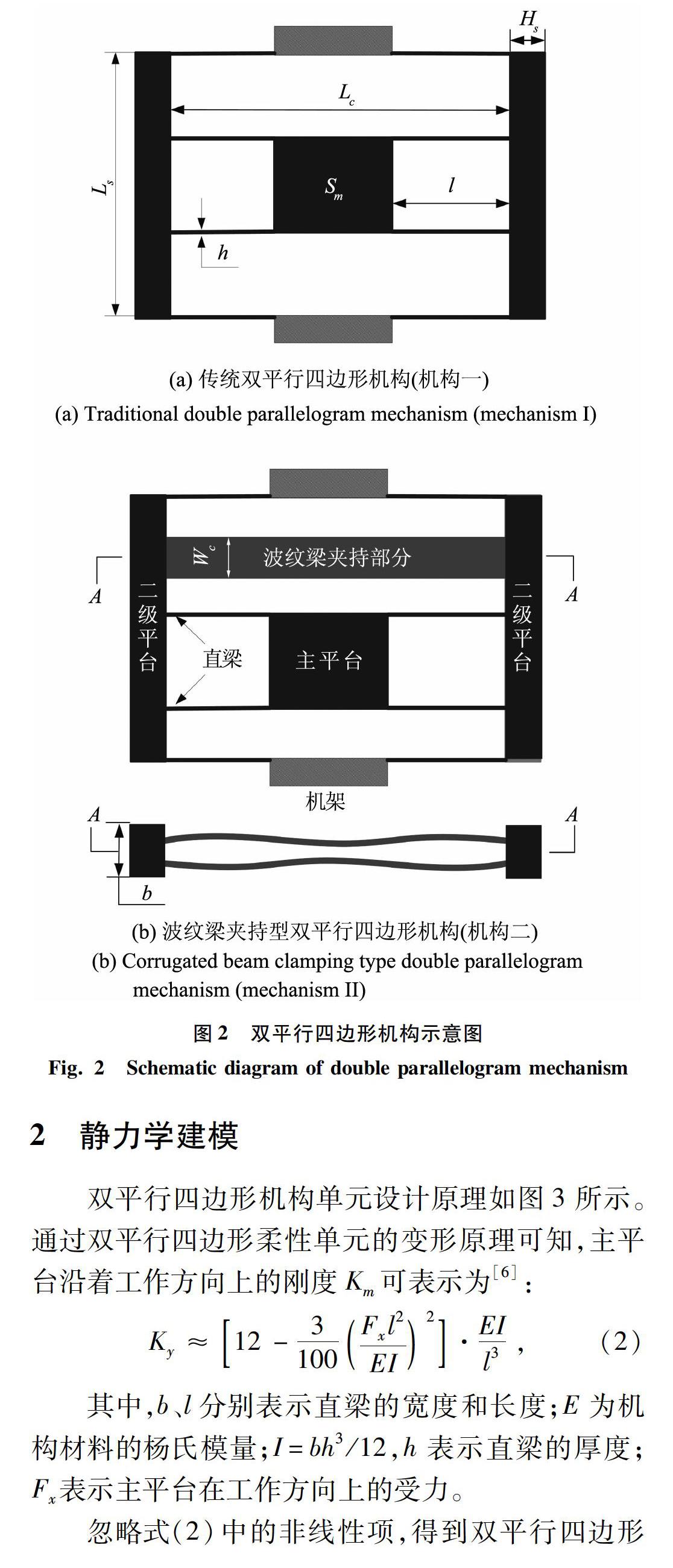
將文中設計的波紋梁安裝到傳統(tǒng)雙平行四邊形機構(gòu)(機構(gòu)一),如圖2(a)所示,由此形成了波紋梁夾持型雙平行四邊形機構(gòu)(機構(gòu)二),如圖2(b)所示。由圖2(b)可知,波紋梁的安裝方式是將2個波紋梁上下對稱安裝到2個二級平臺中間,安裝位置深度在機構(gòu)厚度b的四分之一和四分之三處。
改進后的機構(gòu)二由1個主平臺、2個二級平臺、1個波紋梁夾持部分(包括2個波紋梁)、8個直梁和機架組成。其中,b、l、h分別表示直梁的寬度(機構(gòu)的厚度)、長度和厚度;Sm表示主平臺的面積;Hs、Ls分別表示二級平臺的長度、寬度;Lc表示兩二級平臺之間的距離,近似等同于波紋梁直線距離。
相比于直梁,安裝的波紋梁軸向剛度相對較低,沿寬度方向抗彎能力較高,因此,將2根波紋梁上下對稱安裝在2個二級平臺上,使2個二級平臺平時能夠沿工作方向同時運動,實現(xiàn)對二級平臺的有效約束。
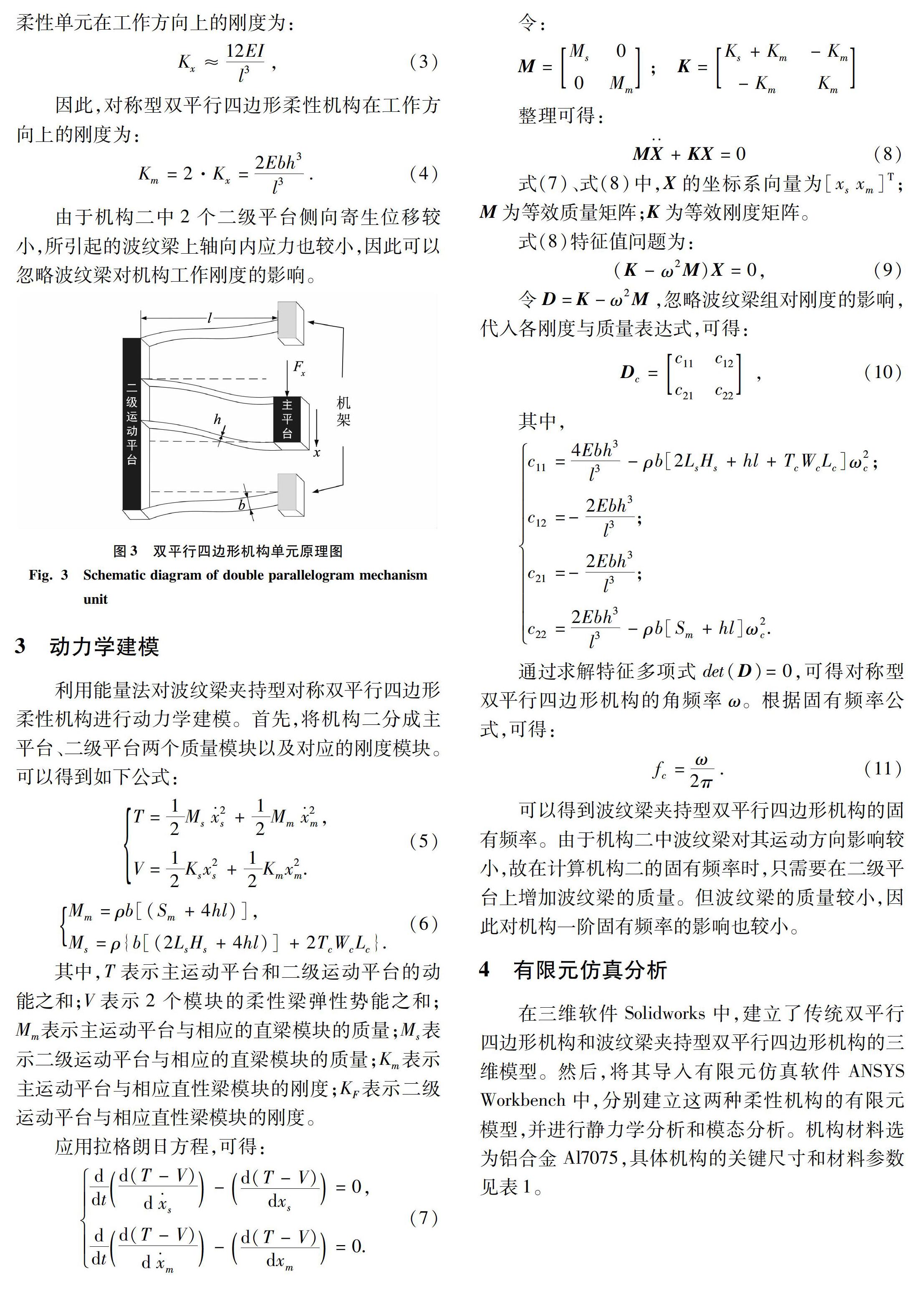
可以得到波紋梁夾持型雙平行四邊形機構(gòu)的固有頻率。由于機構(gòu)二中波紋梁對其運動方向影響較小,故在計算機構(gòu)二的固有頻率時,只需要在二級平臺上增加波紋梁的質(zhì)量。但波紋梁的質(zhì)量較小,因此對機構(gòu)一階固有頻率的影響也較小。
4有限元仿真分析
在三維軟件Solidworks中,建立了傳統(tǒng)雙平行四邊形機構(gòu)和波紋梁夾持型雙平行四邊形機構(gòu)的三維模型。然后,將其導入有限元仿真軟件ANSYSWorkbench中,分別建立這兩種柔性機構(gòu)的有限元模型,并進行靜力學分析和模態(tài)分析。機構(gòu)材料選為鋁合金Al7075,具體機構(gòu)的關(guān)鍵尺寸和材料參數(shù)見表1。
靜力學仿真結(jié)果如圖4所示。在機構(gòu)主平臺的工作方向上施加50N的力后,機構(gòu)一和機構(gòu)二分別產(chǎn)生了0.39877×10-3m和0.3986×10-3m的位移,可計算出其剛度分別為0.12539N/μm和0.12544N/μm,改進后的機構(gòu)二的剛度只增加了0.04%,基本保持不變。另外,數(shù)值分析結(jié)果為0.1254N/μm,計算誤差在0.01%,較為理想。
機構(gòu)二的前三階模態(tài)如圖5所示。這是仿真得到的波紋梁夾持型雙平行四邊形機構(gòu)前三階模態(tài),分別為179.16Hz、484.55Hz和622.32Hz。機構(gòu)一的前三階固有頻率分別為180.76Hz,440.99Hz和498.28Hz。由仿真結(jié)果比較可知,機構(gòu)二的二階和三階固有頻率分別提升了9.9%和24.9%。
5實驗驗證
首先,選擇單獨加工的波紋梁,通過螺栓連接的安裝方式,將波紋梁對稱安裝到二級平臺上,如圖6所示。然后搭建測試系統(tǒng),對機構(gòu)的剛度特性進行實驗分析,測試系統(tǒng)參見圖6。系統(tǒng)中,通過調(diào)整壓電陶瓷驅(qū)動器后面的螺釘來對平臺施加不同的作用力,同時分別利用測微儀(三門峽中原量儀股份有限公司出品,型號為DGS-6C,分辨率為0.05μm)和力傳感器(蚌埠傳感器系統(tǒng)工程有限公司出品,型號為JLBS-MD,量程為0~50kg)對機構(gòu)主平臺的所受力和輸出位移進行測量。通過計算被測力和位移差值比值,得到機構(gòu)一和二在工作方向上的剛度分別為0.803N/μm和0.838N/μm。顯然,2個機構(gòu)的剛度大小幾乎一致。但由于線切割時,對直梁的厚度產(chǎn)生較大誤差,導致直梁厚度小于1mm,同時機構(gòu)的實測剛度也變小,但不妨礙研究中機構(gòu)一和機構(gòu)二的剛度大小基本一致的實驗結(jié)果驗證。
為了測量機構(gòu)的動力學特性,使用了分辨率為0.05μm的電渦流位移傳感器(上海振迪檢測技術(shù)有限公司出品)來測量機構(gòu)主平臺的位移,如圖7所示。實驗過程中,在機構(gòu)主平臺施加一沖擊載荷,使其自由振動,同時使用電渦流傳感器測量其位移,基于LabVIEW搭建信號采集系統(tǒng),并通過數(shù)據(jù)采集卡采集到信號,然后編寫程序?qū)y量時域信號進行頻譜分析,得到實驗結(jié)果見表2。由表2可知,機構(gòu)一前三階固有頻率分別為152Hz、380Hz和425Hz,而機構(gòu)二前三階固有頻率分別為150Hz、415Hz和556Hz。通過對比,機構(gòu)二在一階固有頻率基本保持不變的情況下二階和三階固有頻率較機構(gòu)一分別提高了9.2%和30.8%。分析表2可知,實驗結(jié)果與仿真結(jié)果變化趨勢保持一致,證明了該設計機構(gòu)在動力學性能的改進。
6結(jié)束語
首先,本文設計了一種基于波紋梁夾持的對稱雙平行四邊形機構(gòu),在沒有改變機構(gòu)運動剛度和一階固有頻率的情況下,解決了傳統(tǒng)雙平行四邊形機構(gòu)二級平臺的欠約束問題,從而改善傳統(tǒng)機構(gòu)動力學性能。文中首先對機構(gòu)剛度進行建模,并采用能量法和模塊化思想建立了機構(gòu)的動力學解析模
型。最后,對2種柔性機構(gòu)的靜動力學仿真結(jié)果和
實驗結(jié)果進行了對比分析,分析表明與傳統(tǒng)對稱雙
平行四桿機構(gòu)相比,波紋梁夾持型對稱雙平行四桿機構(gòu)的二、三階模態(tài)的固有頻率均有明顯提高,對于提高大行程柔性機構(gòu)的動力學特性和抑振能力具有重要意義。
參考文獻
[1]AWTARS,MARIAPPANDD.Experimentalmeasurementofthebearingcharacteristicsofstraight-lineflexuremechanisms[J].PrecisionEngineering,2017,49:S0141635916304500.
[2]SHORYAA.SynthesisandanalysisofparallelKinematicXYflexuremechanisms[J].ReviewofScientificInstruments,2015,16(3):251-264.
[3]BROUWERDM.Designprinciplesforsixdegrees-of-freedomMEMS-basedprecisionmanipulators[J].PrecisionEngineering,2010,34(2):307-319.
[4]SMITHST.Flexures:Elementsofelasticmechanisms[M].USA:CRCPress,2014.
[5]LEGTENBERGR,GROENEVELDAW,ELWENSPOEKM.Comb-driveactuatorsforlargedisplacements[J].JournalofMicromechanicsandMicroengineering,1999,6(3):320-329.
[6]AWTARS,SLOCUMH,SEVINCERE.Characteristicsofbeam-basedflexuremodules[J].JournalofMechanicalDesign,2007,129(6):625-639.
[7]BrouwerDM.Designprinciplesforsixdegrees-of-freedomMEMS-basedprecisionmanipulators[D].TheKingdomoftheNetherlands:UniversityofTwente,2007.
[8]JermanJH,GradeJD.Miniaturedevicewithtranslatablemember:US,6664707[P].2003-12-16.
[9]BROUWERDM,OTTENA,ENGELENJBC,etal.Long-rangeelasticguidancemechanismsforelectrostaticcomb-driveactuators[C]//Proceedingsofthe10thInternationalConferenceoftheEuropeanSocietyforPrecisionEngineeringandNanotechnology(EUSPEN2010).Delft,Netherlands:euspen,2010:142-1465.
[10]PANASRM,HOPKINSJB.Eliminatingunder-constraintindoubleparallelogramflexuremechanisms[J].JournalofMechanicalDesign,2015,137(9):092301.
[11]ROYNK,CULLINANMA.Designandcharacterizationofatwo-axis,flexure-basednanopositioningstagewith50mmtravelandreducedhigherordermodes[J].PrecisionEngineering,2018,53:236-247.
