淡水魚水平往復振動頭尾定向輸送方法
2021-05-09 08:23:58郭三琴趙竣威譚鶴群
農業工程學報 2021年4期
萬 鵬,郭三琴,楊 俊,趙竣威,譚鶴群,朱 明
(1. 華中農業大學工學院,武漢 430070;2. 農業農村部長江中下游農業裝備重點實驗室,武漢 430070)
0 引 言
中國是淡水魚養殖生產大國,2019年全國淡水養殖總產量為30.137 4×109kg,其中淡水魚養殖產量為25.480 3×109kg,占整個淡水養殖總產量的84.55%;淡水產品加工量為5.581 7×109kg,占淡水養殖總產量的18.52%[1]。魚體定向是淡水魚機械化、自動化加工前處理的重要步驟,通過定向使魚體按照預想的頭尾及腹背狀態進行輸送,便于后續加工裝置進行自動喂料[2-3]。傳統的魚體定向大多由人工完成,勞動強度大、生產效率低,在一定程度上制約了淡水魚自動化加工業的發展,因此研究淡水魚魚體定向方法和裝備具有重要意義[4-5]。
魚體頭尾定向是魚體定向的主要內容,可使魚體按一定的頭尾順序依次輸送。目前,魚體的頭尾定向原理主要有3種。一是利用魚體的重心分布特點實現定向。如Webster等[6]基于魚體重心位置研究了魚體在旋流作用下通過倒置圓錐容器實現魚體的頭尾定向方法;高星星等[7-8]利用鰱魚魚體摩擦特性及魚體重心靠近頭部的特點,運用傾斜振動臺面對鰱魚進行頭尾定向;張敏[9]通過魚體接觸擋板時重心在魚槽底板位置的變化,使魚頭和魚尾分別進入不同的輸送帶實現魚體頭尾定向。二是利用魚體頭尾幾何形狀差異實現定向。如Wenzel[10]利用魚體頭尾的剛度差異調整魚體實現頭尾定向;Pegoraro等[11]利用傳感器檢測魚頭朝向并結合相應執行機構實現魚體頭尾定向;徐頌波等[12]利用魚體頭部和尾部的截面積差異以及彎曲變形量大小,利用魚頭魚尾判斷裝置、壓輪轉動和分選板的協同作用實現魚體頭尾定向;王遠[13]基于魚體魚頭較硬而魚尾較軟的物理特性,利用翻轉撥輪撥動魚尾調整魚體姿勢實現魚體頭尾定向。三是利用魚體表面的摩擦特性差異實現定向。如瑞典Vmp公司利用定向振動槽和轉向盤共同作用使魚體沿魚頭方向運動[14];Knyszewki[15]利用振動平臺的往復作用,實現細棘長吻魚魚體頭尾定向。林啟儀等[16]利用竹篾條編織的簾片與魚體作用,通過搖臺實現魚體頭尾定向;向云鵬等[17-18]利用魚體沿振動的傾斜臺面下滑時魚頭部分受到的摩擦力合力對魚體質心的轉矩大于魚身部分實現魚體頭尾定向;劉偉[19]對比研究了圓振動和往復振動這2種振動形式,對魚體頭尾和腹背定向設備進行了結構設計。綜上所述,國內外學者針對魚體的頭尾定向方法做了較多研究,設計了一些定向裝置,但是這些裝置大多適用于魚鱗細小的海水魚,一些裝置定向速度慢、誤差大、生產效率不高,難以滿足具有不同表面結構的淡水魚定向處理需求。
振動輸送是工業上應用較多的一種輸送方法,在農業物料分離、農產品輸送、定量給料等方面具有較多應用[20-22]。本文基于水平往復振動原理,以同時完成魚體頭尾定向和輸送為目標,通過選擇適合魚體定向輸送的最佳表面結構輸送帶,分析魚體在往復振動式輸送帶上的運動機制,探索利用魚體表面摩擦特性實現魚體頭尾定向的可行性,以期為魚體定向設備的研發提供理論依據和技術參考。
1 淡水魚魚體表面摩擦特性試驗
淡水魚魚體表面定向生長有鱗片和魚鰓,魚體與輸送帶接觸時會表現出摩擦異性,即沿魚體順鱗方向(從魚頭至魚尾方向)滑動和逆鱗方向(從魚尾至魚頭方向)滑動時所受摩擦力不同[23-25]。為了明確魚體在不同材料表面的摩擦特性,為魚體頭尾定向輸送裝置選擇合適的輸送帶結構,本文利用自制的魚體摩擦系數測量裝置探討魚體在不同表面結構輸送帶上的摩擦特性。
1.1 魚體摩擦系數測量裝置結構與工作原理
魚體摩擦系數測量裝置主要由機架、計算機、S型拉壓力傳感器、力值顯示控制儀、細繩、輸送帶、魚體、伺服電機驅動器、伺服電機組成,主體結構如圖1所示。
測量裝置機架由鋁合金型材搭建而成,由伺服電機驅動;輸送帶為PVC輸送帶;測量裝置尾部設置有一水平臺面,與輸送帶表面平齊;S型拉壓力傳感器和力值顯示控制儀固定于水平臺面上。
試驗時,將不同表面結構輸送帶固定在測量裝置PVC輸送帶表面,再將試驗魚體放在輸送帶表面,通過細繩與傳感器連接;伺服電機驅動測量裝置工作,帶動輸送帶勻速運動,使輸送帶相對于魚體作勻速直線運動,同時由S型拉壓力傳感器采集拉力數值,通過力值顯示控制儀和計算機實時顯示并記錄拉力數值。記錄的拉力數值等于魚體沿順鱗方向或逆鱗方向滑動時所受的摩擦力。
為了增加魚體與輸送帶之間的摩擦,盡可能減少輸送過程中魚體在輸送帶表面的滑動,本文選用3種具有特殊表面結構的輸送帶進行試驗,分別為草坪紋輸送帶、一字紋輸送帶和倒三角紋輸送帶,如圖2所示。
輸送帶由工業纖維布和聚氯乙烯膠組成,結構為多層工業纖維布與聚氯乙烯膠隔層疊加,3種輸送帶的結構參數如表1所示。
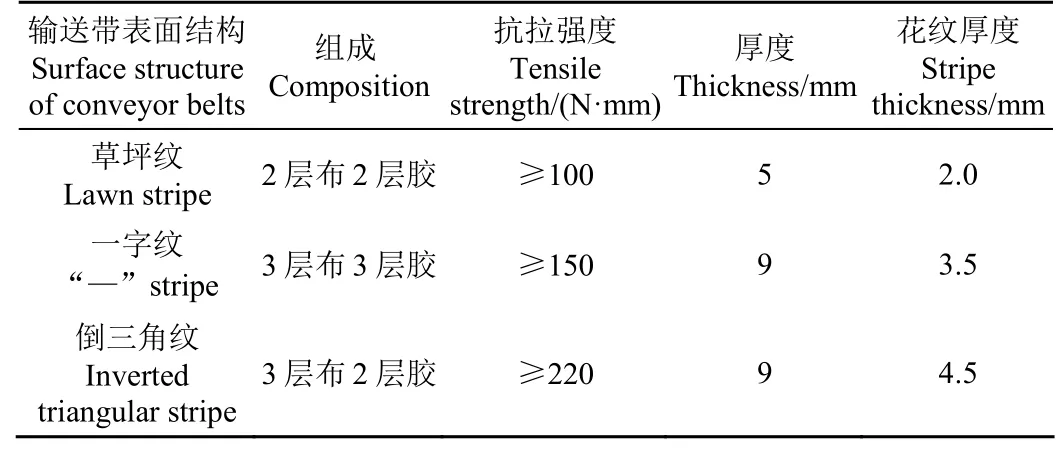
表1 輸送帶結構參數Table 1 Structure parameters of conveyor belt
1.2 測量方法
為了檢測魚體在不同輸送帶上的摩擦系數,本文選用市售的鯽魚、鳊魚、草魚、白鰱4種大宗淡水魚作為試驗樣本。選擇魚體新鮮、魚鱗完整的活魚,每種魚20條,放入水池中暫養。魚體樣本質量如表2所示。

表2 魚體樣本質量Table 2 Weight of fish samples g
試驗前,將水池中的大部分水排出,使魚缺氧自然死亡,但保持魚體表面的濕潤狀態。試驗時,先稱量并記錄各魚體質量,再在魚體頭部中間鉆孔并用細繩將魚體與傳感器連接,將魚體平放在輸送帶表面,啟動魚體摩擦系數測量裝置,在0.1 m/s速度下依次測量輸送帶相對于魚體沿順鱗方向滑動時的摩擦力;再在魚體尾部中間鉆孔并用細繩將魚體與傳感器連接,在相同條件下測量輸送帶相對于魚體沿逆鱗方向滑動時的摩擦力。測量過程中,假定魚體兩側魚鱗結構相同,首先利用魚體一側測量順鱗摩擦力,再利用魚體另一側測量逆鱗摩擦力;然后去鱗,再按同樣的方法,測量去鱗后魚體的順鱗摩擦力和逆鱗摩擦力。
記輸送帶相對于魚體沿順鱗方向(從魚頭至魚尾方向)滑動時的摩擦力為F1(N),沿逆鱗方向(從魚尾至魚頭方向)滑動時的摩擦力為F2(N),魚體質量為m(g),則魚體的摩擦系數計算公式如下:
式中μ1為魚體順鱗方向摩擦系數;μ2為魚體逆鱗方向摩擦系數;Δμ為逆鱗和順鱗摩擦系數差值絕對值;g為重力加速度,m/s2。
1.3 魚體摩擦系數測試結果與分析
淡水魚魚體在不同表面結構輸送帶表面滑動時的摩擦系數測試結果如圖3所示。
由圖3可知,對于試驗用的4種淡水魚,不論魚體表面是否有魚鱗,在3種不同表面結構輸送帶上分別沿逆鱗方向和順鱗方向滑動時,魚體逆鱗方向摩擦系數和順鱗方向摩擦系數均存在一定差異,且均表現為逆鱗方向摩擦系數大于順鱗方向摩擦系數。在草坪紋、一字紋、倒三角紋輸送帶上,有鱗魚體逆鱗方向和順鱗方向摩擦系數差值分別為:0.08±0.02、0.13±0.04、0.49±0.04,去鱗魚體逆鱗方向和順鱗方向摩擦系數差值分別為:0.29±0.06、0.17±0.04、0.38±0.11。
2 魚體頭尾定向輸送過程分析
進行魚體頭尾定向輸送時,輸送帶作快速水平往復振動,在摩擦力作用下帶動魚體在輸送帶表面滑動,魚體的加速度用公式表示如下:
式中a為魚體在輸送帶表面滑動時的加速度,m/s2;F為魚體滑動時受到的摩擦力,N;μ為魚體在輸送帶表面的滑動摩擦系數。
當輸送帶相對于魚體沿順鱗方向振動時,輸送帶作用于魚體的摩擦力沿魚鱗方向,記魚體加速度為a1;當輸送帶相對于魚體沿逆鱗方向振動時,輸送帶作用于魚體的摩擦力沿魚體的逆鱗方向,記魚體的加速度為a2;根據魚體表面摩擦特性試驗結果可知a1<a2。
當輸送帶作水平往復振動時,若輸送帶沿魚體順鱗方向運動的加速度a0小于或等于魚體的加速度a1,則魚體相對輸送帶靜止,能實現輸送[22]。若要實現魚體在輸送帶表面連續滑動,則輸送帶的加速度a0需要大于魚體的加速度a2,即a1<a2<a0時,魚體相對于輸送帶表面沿順鱗方向和逆鱗方向均有連續滑動,魚體作周期性運動,此時魚體加速度a1和a2相對較小,a0相對較大,輸送帶加速時間相對于整個輸送周期較短,忽略不計;當輸送帶水平往復運動時,規定相對于魚體逆鱗方向運動為正向,相對于魚體順鱗方向運動為負向,則輸送帶和魚體的運動速度變化如圖4所示。
由圖4可知,在0~t4時間段內,忽略0~t1和t2~t4時間段輸送帶的加速和減速過程,則輸送帶作速度為Vm的正向勻速直線運動,此時魚體在輸送帶摩擦力的作用下開始移動,作初速度為0、加速度為a2(m/s2)的勻加速直線運動;到t3時刻魚體的速度為V1(m/s),位移為S1(m),則有:
在t4~t8時間段內,忽略t4~t5和t6~t7時間段輸送帶的加速和減速過程,輸送帶作速度為Vm的反向勻速直線運動。魚體由于慣性作用,相對于輸送帶表面繼續沿逆鱗方向滑動,同時受到沿順鱗方向的摩擦力作用,作初速度為V1=a2t、加速度為a1的勻減速直線運動;到t8時刻魚體的速度為V2,位移為S2,則有:
以此類推,可得t7~t12和t12~t15時間段內魚體的位移S3和S4分別為
由此可得魚體的位移為
則魚體經過周期為n的循環之后總位移S為
即:
由公式(8)可知,在輸送帶水平振動輸送魚體過程中,當魚體加速度a1<a2時,魚體總位移S>0,即魚體朝逆鱗方向滑動,且a2越大,a1越小,即逆鱗和順鱗摩擦系數差值Δμ越大,S越大。同理,當輸送帶的初始振動方向沿魚體順鱗方向時,魚體沿逆鱗方向滑動,且a2越大,a1越小,即逆鱗和順鱗摩擦系數差值Δμ越大,魚體總位移S越大。
綜上可知:不論輸送帶初始振動方向沿魚體逆鱗方向還是沿魚體順鱗方向,在滿足a1<a2的條件下,魚體都將沿著逆鱗方向滑動,即可實現魚體的頭尾定向輸送;且逆鱗和順鱗摩擦系數差值越大,越有利于定向輸送。
3 魚體頭尾定向輸送試驗
在前文分析的基礎上,為了探討不同因素對淡水魚頭尾定向輸送過程的影響,本文搭建了魚體頭尾定向輸送試驗裝置,開展淡水魚魚體頭尾定向輸送試驗,以確定相關影響因素和最佳作業參數。
3.1 魚體頭尾定向輸送試驗裝置與設備
魚體頭尾定向輸送試驗裝置的整體結構如圖5所示。
試驗裝置機架主體由鋁型材搭建而成,PVC輸送帶安裝于同步棒輪I和同步棒輪II上,兩側安裝有擋板。伺服電機型號130AEA26025-SH3,和同步棒輪II之間通過同步帶連接。伺服電機帶動輸送帶作快速水平往復運動,將不同表面結構輸送帶固定在PVC輸送帶表面即可實現不同表面結構輸送帶的快速水平往復運動。試驗裝置結構參數如表3所示。
試驗所用設備還包括游標卡尺(精度0.01 mm)、鋼尺(量程500 mm)、電子秤(精度0.01 g)、秒表(精度0.01 s)等。
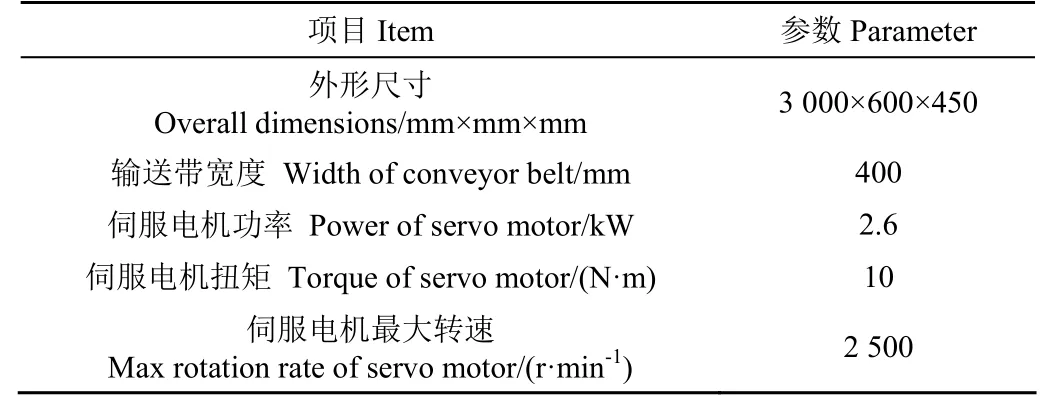
表3 試驗裝置主要結構參數Table 3 Main structural parameters of the test device
3.2 試驗材料
本文以鯽魚、鳊魚、草魚、白鰱4種大宗淡水魚品種作為試驗對象。淡水魚樣本購于某市場,每種20條,樣本個體新鮮、外表完整,采購回來后放入水池中暫養。魚體樣本質量和外形尺寸如表4所示。
試驗前,將水池中的大部分水排出,使魚體缺氧自然死亡,但保持魚體表面的濕潤狀態。
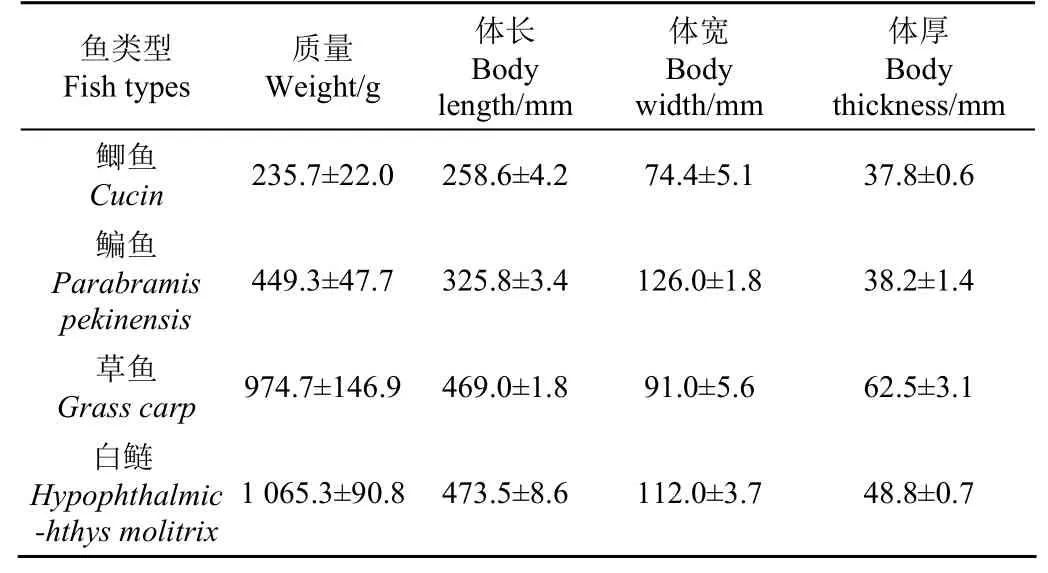
表4 試驗用淡水魚樣本質量和外形尺寸Table 4 Test fresh water weight and fish body size
3.3 試驗方法與評價指標
本文采用魚體定向輸送時間作為定向輸送效果的評價指標。定向輸送時間T定義為魚體在輸送帶表面滑移距離為1 m時所用時間。將魚體隨機堆放于輸送帶的中間位置,然后啟動試驗裝置,魚體在輸送帶的作用下開始運動,從魚嘴進入輸送帶表面規定的區域時開始計時,到魚尾離開規定距離的區域時停止計時,記錄每條魚滑移所需的時間。
每次試驗隨機選取5條魚進行試驗,重復3次,結果取平均值。
3.4 結果與分析
根據前文分析可知,影響魚體頭尾定向輸送效果的主要因素包括輸送帶類型、魚鱗狀態、振動頻率、振動振幅等,本文采用單因素試驗對4個因素對魚體頭尾定向效果的影響規律進行研究。
3.4.1 輸送帶表面結構對定向輸送效果的影響
為了確定3種輸送帶在連續水平往復振動狀態的實際定向效果,根據預試驗結果,為確保實現魚體頭尾定向輸送,設定定向輸送裝置振動頻率為5 Hz,振幅為100 mm,魚體為有鱗狀態,探究魚體在3種不同表面結構輸送帶上的頭尾定向輸送效果。魚體能快速完成頭尾定向輸送,記為“能定向輸送”;魚體在輸送帶上來回滑動,定向效果不明顯時記為“不明顯定向輸送”,試驗結果如表5所示。

表5 輸送帶表面結構對魚體頭尾定向的影響Table 5 Effects of surface structure of conveyor belt on head-to-tail orientation of fish body
從表5中可以看出,有鱗淡水魚魚體在倒三角輸送帶表面有明顯的頭尾定向輸送效果,且定向輸送時間小于3 s;在草坪紋、一字紋輸送帶表面定向輸送所需時間均大于11 s,定向輸送效果不明顯;這是因為魚體在一字紋、草坪紋輸送帶表面滑動時,逆鱗摩擦系數與順鱗摩擦系數差別不大,作用于魚體表面的摩擦力相差不大,導致魚體在輸送帶表面來回滑動。對去鱗魚體進行同樣試驗,發現在倒三角輸送帶表面頭尾定向輸送效果明顯,所需時間小于5 s;在草坪紋、一字紋輸送帶表面定向輸送所需時間大于14 s,定向輸送效果不明顯。故在實際頭尾定向輸送過程中,宜選用倒三角紋輸送帶作為魚體頭尾定向裝置的輸送帶。
3.4.2 魚鱗狀態對定向輸送效果的影響
為了探討魚體是否去鱗對頭尾定向輸送效果的影響,根據預試驗結果,設定魚體頭尾定向輸送試驗裝置的振動頻率為5 Hz,振動幅度為100 mm,定向輸送帶為倒三角紋輸送帶,探究魚體有鱗和去鱗2種狀態下頭尾定向輸送效果。試驗結果如圖6所示。
從圖6中可以看出,有鱗魚體和去鱗魚體在倒三角紋輸送帶表面都能實現頭尾定向輸送,有鱗狀態下4種魚魚體的頭尾定向輸送所需時間平均值為2.42 s;去鱗狀態下4種魚魚體也能實現定向輸送,所需時間平均值為3.39 s。在倒三角紋輸送帶表面,有鱗魚體逆鱗方向和順鱗方向摩擦系數差值大于去鱗魚體逆鱗方向和順鱗方向摩擦系數差值,輸送帶通過魚鱗作用于魚體,使有鱗魚體能夠更快移動,因此有鱗魚體實現頭尾定向輸送所需時間較去鱗魚體短。同時,魚體結構不同、魚鱗以及體表組織結構差異,使體質量和魚鱗較大的魚體定向輸送所需時間較短,如有鱗草魚體質量和鱗片較大,頭尾定向輸送所需時間最短為2.08 s,去鱗鳊魚體質量較小、無鱗片,頭尾定向輸送所需時間最長為3.76 s。
3.4.3 振動頻率對定向輸送效果的影響
試驗過程中發現,如果魚體頭尾定向輸送試驗裝置的振動頻率低于3 Hz,魚體會在輸送帶表明來回移動,定向效果不明顯;而振動頻率超過7 Hz,魚體與輸送帶之間易產生相對滑動。根據預試驗,設定魚體頭尾定向輸送試驗裝置的振動幅度為100 mm,魚體為有鱗狀態,定向輸送帶為倒三角輸送帶,取振動頻率3~7 Hz,探究振動頻率對魚體頭尾定向輸送的影響。試驗結果如圖7所示。
從圖7可以看出,隨著振動頻率逐漸增加,4種魚魚體的定向輸送時間均逐漸減小;當振動頻率小于5 Hz時,定向輸送時間隨振動頻率增大而減小的趨勢明顯;當振動頻率大于5 Hz時,定向輸送時間隨振動頻率增大而下降的趨勢不明顯,3~5 Hz范圍內振動頻率對魚體頭尾定向輸送效果影響較大。隨著試驗裝置振動頻率增加,魚體水平往復移動速度加快,定向輸送時間減少。在同一振動頻率下,體質量和鱗片較大的魚體移動速度較快,頭尾定向輸送時間較少。4種魚中,鯽魚體質量小,草魚與白鰱的體質量相差不大,但鱗片大一些,所以同一振動頻率下草魚的頭尾定向輸送時間較短,鯽魚頭尾定向輸送時間較長。
3.4.4 振幅對定向輸送效果的影響
試驗過程中發現,隨著魚體頭尾定向輸送試驗裝置振幅的變化,魚體頭尾定向輸送時間也會變化。在輸送帶的1次振動周期中,當試驗裝置振幅小于60 mm時,魚體移動距離較小,定向時間較長;當試驗裝置振幅大于140 mm時,魚體移動距離較大,振動劇烈。為了研究振幅變化與魚體定向輸送時間之間的變化規律,設定魚體為有鱗狀態,定向輸送帶為倒三角紋輸送帶,取振動幅度為60~140 mm,探究振幅大小對魚體頭尾定向輸送效果的影響,試驗結果如圖8所示。
從圖8可以看出,振幅對4種魚的定向輸送時間均有較大影響,魚體定向輸送時間隨振幅的增大而減小。當振幅小于100 mm時,定向輸送時間隨振幅增大而減小的趨勢明顯;當振幅大于100 mm時,定向輸送時間隨振幅增大而減小的趨勢變化相對變弱。根據魚體頭尾定向輸送試驗裝置的輸送效率及運行穩定性,80~120 mm的振幅范圍變化對魚體頭尾定向輸送效果的影響較大。試驗裝置振幅小,輸送帶單次水平振動時間短,魚體移動距離較短,定向輸送時間較長;振幅大,輸送帶單次水平振動時間長,魚體移動距離較大,定向輸送時間較短。在同一振幅下,體質量和鱗片大的魚體移動速度較快,移動距離長,定向輸送時間較短;體質量和鱗片小的魚體移動速度較慢,移動距離短,定向輸送時間較長;4種魚中,鯽魚體質量和鱗片較小,草魚體質量和鱗片較大,在同一振幅下,草魚頭尾定向輸送所需時間較短,鯽魚頭尾定向輸送所需時間較長。
3.5 雙因素試驗
根據前文單因素試驗結果可知,相對于草坪紋輸送帶和一字紋輸送帶,倒三角紋輸送帶對魚體的定向輸送效果更好,且對有鱗魚體和去鱗魚體都具有較好的適用性。試驗裝置的振動頻率和振幅對魚體頭尾定向輸送效果影響較大,振動頻率過低或過高以及振幅過小或過大,都會造成魚體在振動輸送帶表面滑動或是來回振動,影響定向效果,也容易造成伺服電機過熱;因此在單因素試驗結果基礎上,采用雙因素無重復試驗對振動頻率和振幅組合進行優化。
3.5.1 試驗方案
本文以帶魚鱗的完整鯽魚為試驗對象,以定向輸送時間T為評價指標,以振動頻率、振動振幅為試驗因素,試驗因素水平如表6所示。
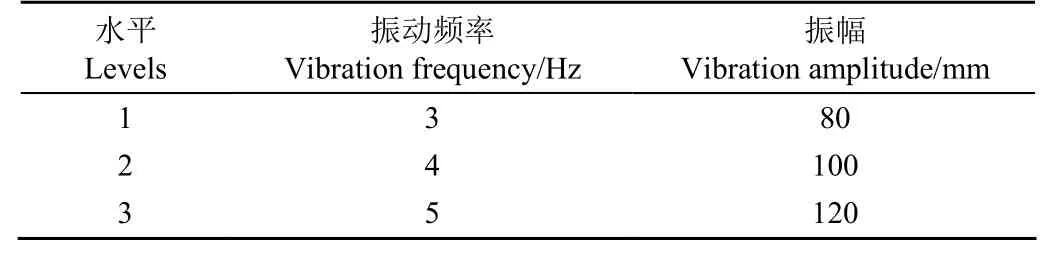
表6 雙因素水平表Table 6 Table of factor and level
3.5.2 結果與分析
按照表6中的因素水平編碼進行雙因素無重復試驗,結果如表7所示。

表7 雙因素試驗結果Table 7 Results of double factor tests s
對雙因素重復試驗結果進行方差分析,結果如表8所示。
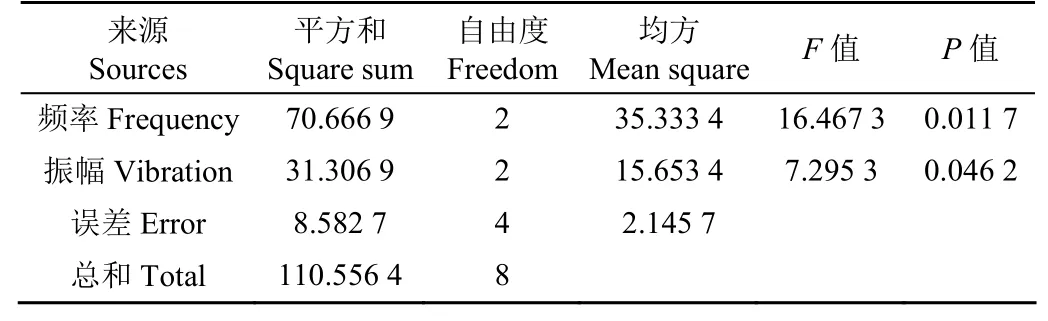
表8 方差分析Table 8 Analysis of variances
由表8可知,振動頻率和振動幅度對試驗結果影響顯著。根據表7試驗結果可知,在振動頻率5 Hz,振動振幅120 mm條件下,帶鱗鯽魚魚體頭尾定向輸送效果最好,定向輸送時間為2.65s。其他帶鱗或去鱗魚在振動頻率5 Hz,振動振幅120 mm條件下進行頭尾定向輸送試驗,4種魚帶鱗狀態下的魚體定向輸送平均時間為2.45 s,去鱗狀態下為3.43 s。
振動頻率5 Hz、振動振幅120 mm條件下,鯽魚魚體頭尾定向輸送過程如圖9所示。
4 討 論
魚體定向輸送過程中,由于魚體與輸送帶之間存在摩擦,輸送帶水平往復運動時與魚體之間產生相對移動,輸送帶與魚體之間產生的摩擦力帶動魚體進行移動;魚體與輸送帶之間順鱗方向摩擦系數與逆鱗方向摩擦系數存在差異,隨著輸送帶的往復運動,作用于魚體的摩擦力大小不同,使魚體的運動速度產生差異,從而實現魚體的定向輸送。前文分析可知,相對于不同表面結構輸送帶,魚體順鱗方向摩擦系數與逆鱗方向摩擦系數差值越大,越有利于實現魚體頭尾定向輸送。
當魚體表面有鱗片時,輸送帶通過鱗片與魚體發生作用。由于魚鱗具有一定硬度,在逆鱗方向,輸送帶的表面結構直接作用于魚鱗的邊沿,進而作用于魚體;而順鱗方向,輸送帶的表面結構作用于魚鱗表面,產生滑移,因此,當輸送帶與有鱗魚體接觸時,魚體順鱗方向摩擦系數與逆鱗方向摩擦系數不同;當輸送帶往復運動時,可以帶動魚體進行定向移動。
當魚體表面無鱗片時,輸送帶直接作用于魚體表面。魚鱗為魚體表面真皮層的衍生物,去鱗之后,魚體表面的魚鱗連接組織仍然存在,逆鱗方向時,輸送帶的表面結構作用于魚鱗連接組織;順鱗方向時,輸送帶的表面結構從魚體表面及魚鱗連接組織上滑過,作用力小于逆鱗方向,因此,魚體去鱗后,魚體順鱗方向摩擦系數與逆鱗方向摩擦系數均會減小,但逆鱗方向摩擦系數仍大于順鱗方向,輸送帶往復運動時,可以帶動魚體進行定向移動。
當魚體垂直或傾斜于輸送帶運動方向時,隨著輸送帶的往復運動,魚體會調整至頭尾方向與輸送帶運動方向一致。這是由于魚體從魚頭至魚尾各部分的結構分布不均勻,各部分與輸送帶之間的摩擦力不相同;隨著輸送帶的往復運動,輸送帶表面結構作用在魚體不同部位的力大小不一樣,會使魚體發生轉動,從而實現魚體的自動調整。當輸送帶中堆積有多條魚體時,隨著輸送帶的往復運動,魚體逐漸散開,同時魚體之間發生碰撞,使魚體發生轉動,隨著輸送帶往復運動時間的增加,魚體最終實現頭尾調整并定向移動。
5 結 論
1)本文搭建了魚體摩擦系數測量裝置對淡水魚在不同表面結構輸送帶上的摩擦系數進行檢測,結果表明:不論魚體是否有鱗,在不同結構輸送帶表面滑動時,魚體逆鱗方向摩擦系數與順鱗方向摩擦系數均不相等,可以利用這種差異實現魚體的頭尾定向輸送。
2)輸送帶水平往復振動時魚體頭尾定向輸送過程分析表明:在滿足順鱗方向魚體加速度小于逆鱗方向魚體加速度的條件下,魚體都將沿著逆鱗方向滑動,且逆鱗和順鱗摩擦系數差值的絕對值越大,越有利于魚體頭尾定向輸送。
3)單因素試驗結果表明:倒三角紋輸送帶的魚體頭尾定向輸送效果明顯;魚體在有鱗和去鱗狀態下均能實現頭尾定向輸送,且有鱗狀態下定向輸送更快;在振動頻率3~5 Hz,振幅60~100 mm條件下魚體定向輸送時間隨振動頻率和振幅增大而下降,且下降趨勢明顯。
4)雙因素試驗結果表明:振動頻率和振幅對魚體定向輸送均有顯著影響;振動頻率5 Hz、振幅120 mm條件下,帶鱗鯽魚魚體頭尾定向輸送效果最好,定向輸送時間為2.65 s。振動頻率5 Hz、振幅120 mm條件下,4種淡水魚帶鱗狀態下魚體定向輸送平均時間為2.45 s,去鱗狀態下為3.43 s。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40