基于MATLAB的自主水下航行器經典控制算法仿真分析
2021-05-08 08:01:58劉華棟康寶臣馮麗娜
數字海洋與水下攻防 2021年2期
劉華棟,康寶臣,馮麗娜
(1.海軍裝備部,山西 太原 030027;2.山西汾西重工有限責任公司,山西 太原 030027)
0 引言
在海洋資源開發和海軍軍事任務雙重需求的牽引下,水下無人航行器以及自主水下航行器成為當前的熱門研究課題。自主水下航行器就是離開發射平臺后仍具備自行航行能力至預定水域偵查、探測和打擊為一體的航行器。為進一步提高布設的隱蔽性,研制自主水下航行器就顯得特別重要。自主水下航行器能在敵方防潛設施外啟動航行,利用其自身的動力裝置航行到預定海域對敵重要港口或水域進行偵查、探測和打擊。
自主水下航行器無論是在軍用市場還是民用市場,全球各國都在加緊研制與開發采用最新科技成果的水下無人航行器。未來的水下無人航行器結構更加簡單,功能多樣,自適應能力強,可游刃有余地執行復雜的任務[1]。而各種控制算法,如神經網絡控制、模糊控制、滑模控制和模糊 PID控制等智能控制算法均被應用到了UUV的運動控制中[2-7]。文獻[2]采用了經典的 PID控制算法,文獻[3]采用了以太網的分布式控制系統設計,文獻[4]采用了滑模理論控制算法,文獻[5]則將經典 PID算法、自抗擾技術、模糊策略和滑模控制算法分別進行了分析與設計,文獻[6]采用了神經網絡控制算法,文獻[7]采用了魯棒滑模控制算法。
進入21世紀,仿真技術得以發展的主要原因,是它所帶來的巨大社會經濟效益。仿真主要應用于航空、航天、航海、電力、化工以及其他工業過程控制等工程技術領域。在航空工業方面,采用仿真技術使大型客機的設計和研制周期縮短20%。利用計算機仿真,不僅節省大量燃料和經費,而且不受氣象條件和場地的限制。在航天工業方面,采用仿真實驗代替試航試驗可使實彈試驗的次數減少80%。在電力工業方面采用仿真系統對核電站進行調試、維護和排除故障,1年即可收回建造仿真系統的成本。現代仿真技術不僅應用于傳統的工程領域,而且日益廣泛地應用于社會、經濟、生物等領域,如交通控制、城市規劃、資源利用、環境污染防治、生產管理、市場預測、世界經濟的分析和預測、人口控制等。因此,利用仿真技術來研究這些系統就具有更為重要的意義。
1 總體參數與流體動力參數
自主水下航行器航行控制數學模型屬于灰箱系統,其運動規律遵循牛頓經典力學定律,質量守恒定律和能量守恒定律。數學模型中的流體動力參數可通過水洞試驗、風動試驗或自主水下航行器流體動力參數辨識得到,某航行器所需要的總體參數明細如表1所示。

表1 總體參數Table 1 General parameters
表1中:流體的密度ρ=999.866 kg/m3;航行器的體積V=1.1 m3;航行器的質量m=1 300 kg;航行器的長度L=7 m;航行器的最大橫截面積S=0.224 m2;航行器質心距浮心的距離xc=-25 mm;航行器質心下移量yc=-20 mm;航行器質心側移量zc=0;航行器繞航行器坐標系x軸轉動的轉動慣量Jxx=602kg·m;航行器繞航行器坐標系軸y轉動的轉動慣量Jyy=6 1232kg·m;航行器繞航行器坐標系軸z轉動的轉動慣量Jzz=6 083 kg·m2。
流體動力參數明細如表2所示。

表2 流體動力參數Table 2 Hydrodynamic parameters
2 縱向彈道數值模擬
2.1 縱向運動存在的條件
航行器在空間的運動可分解為縱向運動和側向運動,這是一種簡化的研究方法。在滿足一定條件下,這種簡化研究方法,在工程精度范圍內是可以允許的。航行器的縱向運動為一平面運動,其運動平面與航行器的縱對稱面重合,且為空間垂直平面(地面坐標系平面)。航行器縱向運動單獨存在的條件是:
1)航行器對其縱對稱面是對稱的,在縱向運動中,不產生側向力、偏航力矩和橫滾力矩;
2)航行器控制系統是理想的,使航行器縱對稱面保持在垂直面內;
3)航行器航行的彈道為垂直面內的平面彈道,如爬潛和尋深彈道,直航和垂直面導引彈道。
2.2 原始縱向運動方程組-數學模型
縱向運動是指航行器在鉛垂平面(地面坐標系的ox0y0平面)內的運動,并且航行器坐標系的oxy平面與運動平面重合。縱向運動由航行器重心在oxy平面內的運動和繞oz軸的轉動運動組成。由于地面坐標系的ox0軸方向可以任意選取,如果將ox0軸也選在運動平面內,則地面系的ox0y0平面,航行器系的oxy平面,速度系的ox1y1平面,半速度系的ox1y1平面都是同一平面。這時有9個運動參數,即β、υz、ωx、ωy、φ、ψ、z0、Ψ、Φc均為0,余下的非零運動參數為α、θ、Θ、ωz、υx、υy、υ、x0、y0,這9個運動參數稱為縱向運動參數,描述縱向運動參數變化規律的方程稱為縱向運動方程。
假定航行器具有oxy及oxz共2個對稱面,于是根據航行器空間運動方程組可以得到如下方程[8]:

由式(1)-(9)組成的方程組就是航行器原始的縱向運動方程組。如果橫舵角δe已知,則由9個方程可以求解9個運動參數,從而確定縱向運動和彈道。在固定舵角下的運動和彈道稱為非操縱運動和彈道。航行器制導系統通過傳感器測量航行器運動參數,通過自導系統測量目標相對運動參數,根據這些參數,制導系統給出操舵指令,形成閉環系統。制導系統的工作原理可以寫成制導方程(控制方程和導引方程),在縱向運動中需要補充制導方程,與縱向運動方程聯立求解縱向運動參數和橫舵角δe,確定航行器運動及其彈道。
2.3 縱向運動數值模擬軟件程序編制
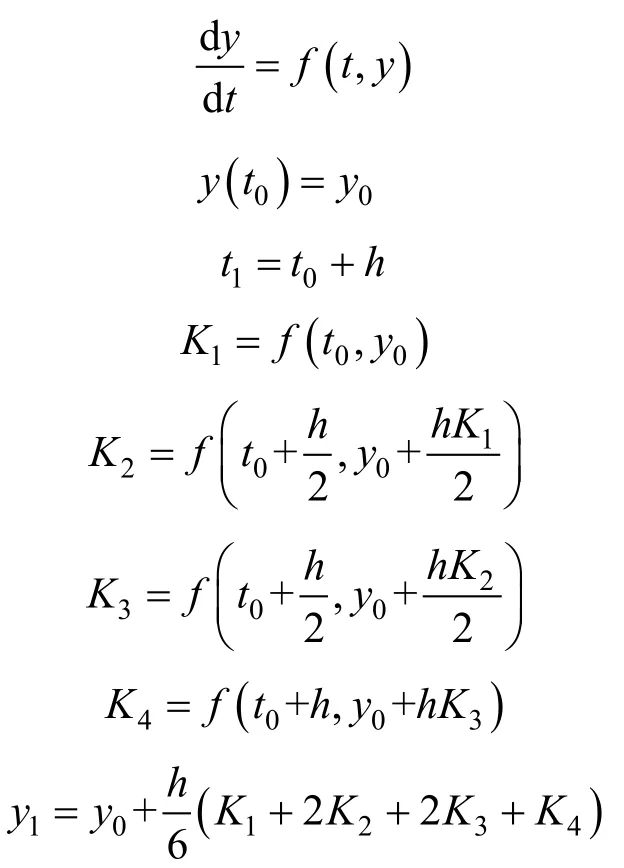
縱向運動程序算法采用Rung_Kutta(四階)方法,由MATLAB實現。
ODE解算器時,需要將微分方程組轉化成MATLAB可接受的標準格式,如下:
ODEs由多個高階或隱式微分方程組成,將其變換成一階顯式常微分方程組。本文的航行器縱向運動方程組是由9個隱式微分方程構成的ODEs,可轉換成一階顯示微分方程,然后求解出右函數。
四階龍格-庫塔法(The Fourth-Order Runge-KuttaMethod)形式如下[9]:
航行器縱向控制方程采用如下形式[10]:

3 仿真結果
本文共進行了4種工況下的縱向運動仿真,包括穩態航速8 m/s定深5 m時的縱向運動仿真、穩態航速8 m/s定深50 m時的縱向運動仿真、穩態航速8 m/s定深5 m無自由角時的縱向運動仿真和穩態航速8 m/s定深50 m無自由角時的縱向運動仿真;由于篇幅限制,只列出穩態航速8 m/s定深50 m時的縱向運動仿真結果如下。

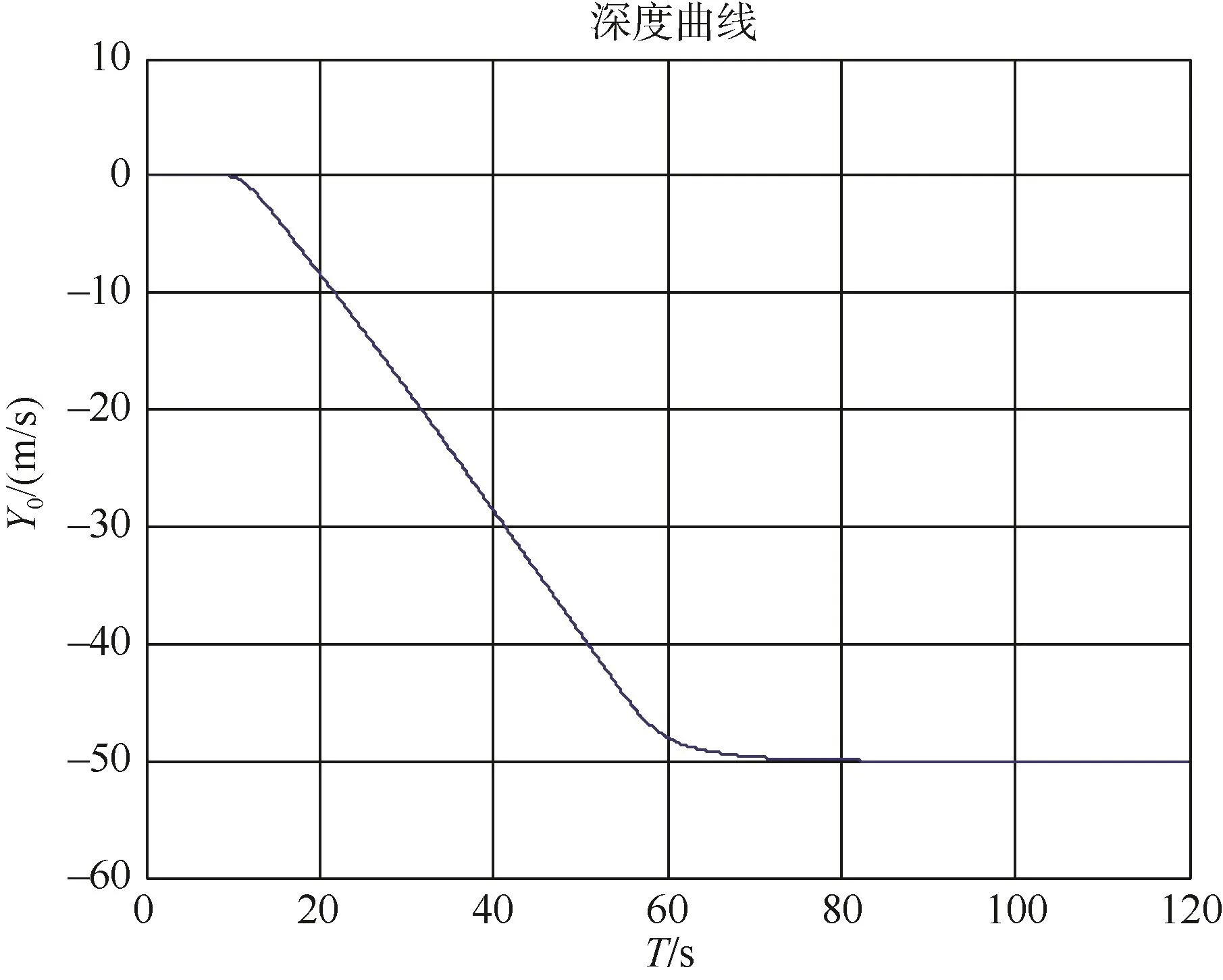
圖1 深度曲線Fig.1 Depth curve
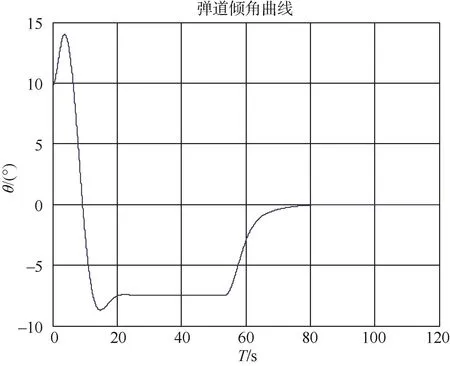
圖2 彈道傾角曲線Fig.2 Trajectory inclination curve
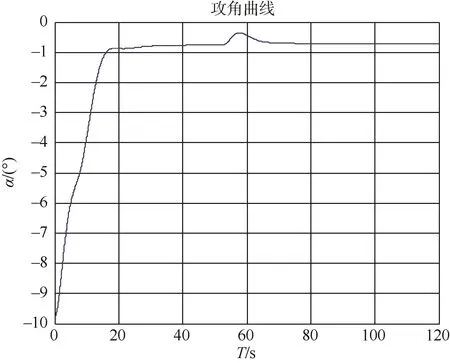
圖3 攻角曲線Fig.3 Angle of attack curve
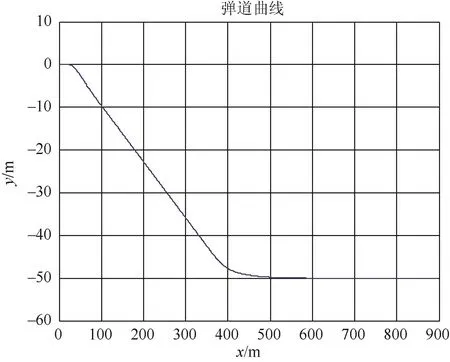
圖4 彈道曲線Fig.4 Trajectory curve
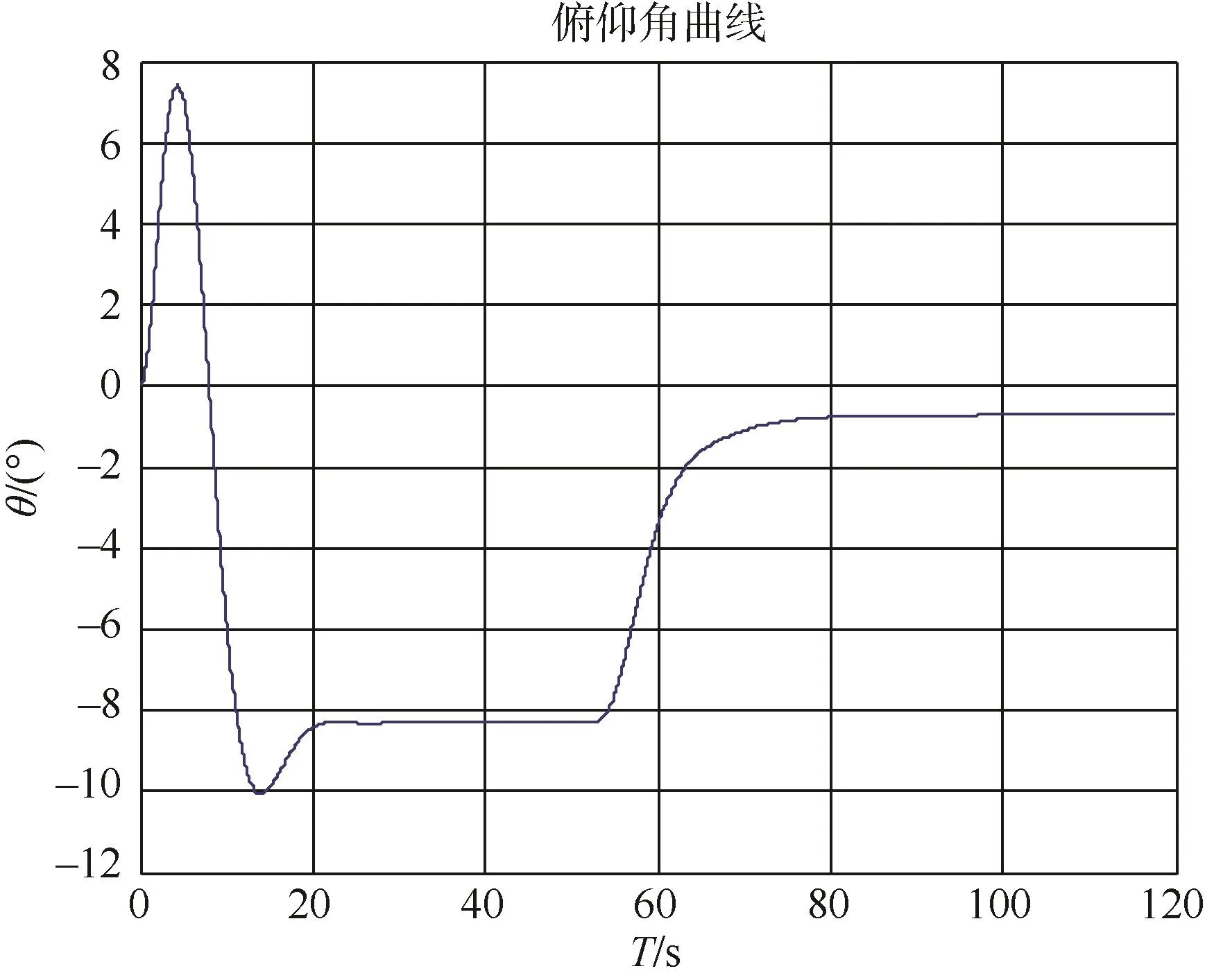
圖5 俯仰角曲線Fig.5 Pitch angle curve
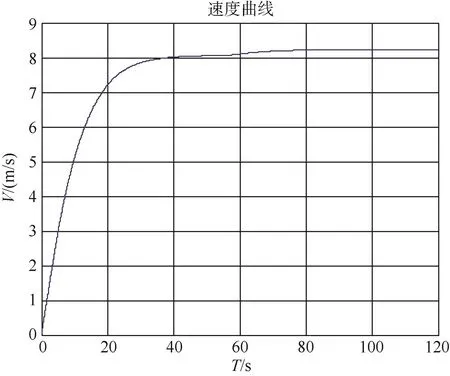
圖6 速度曲線Fig.6 Velocity curve
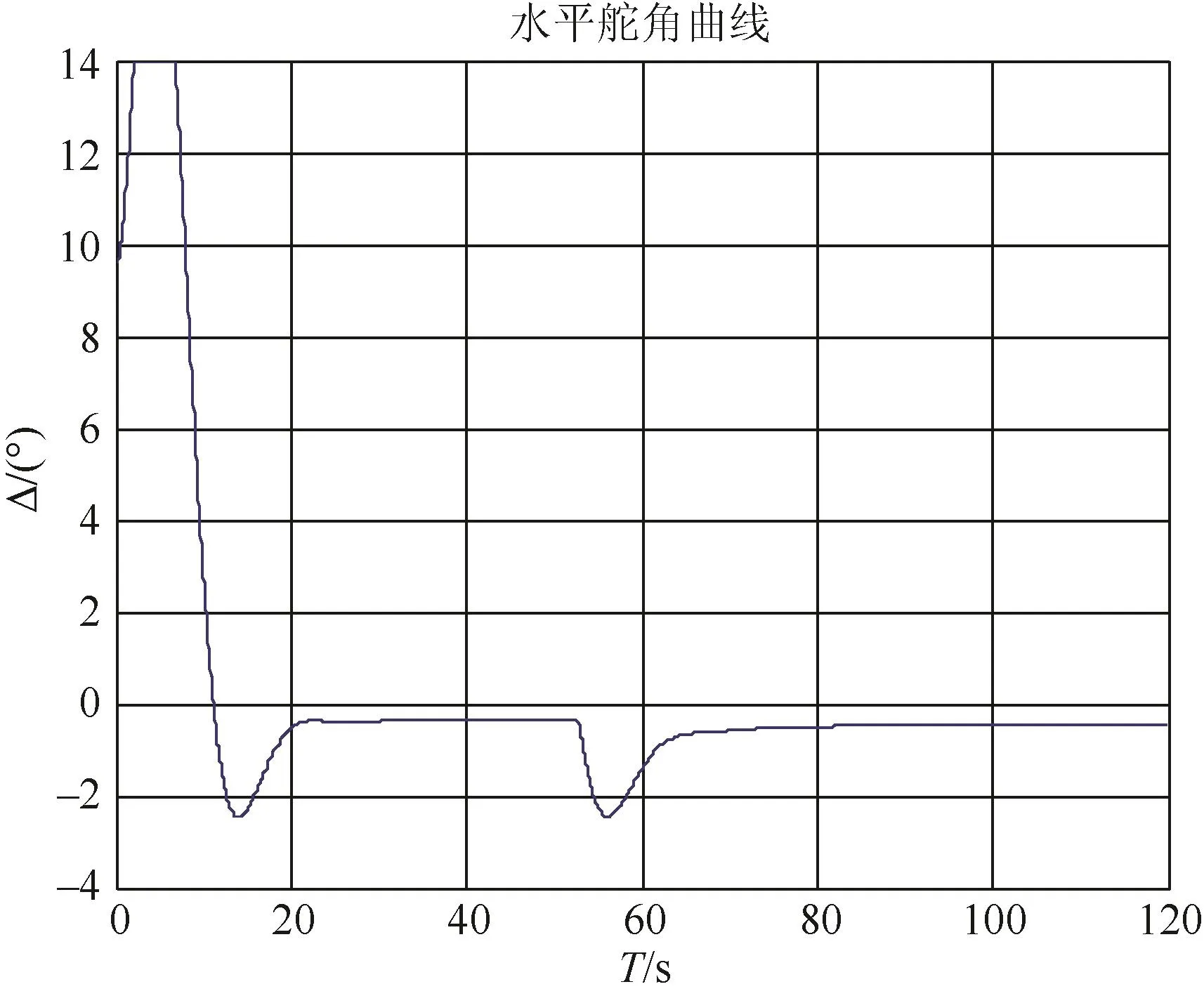
圖7 水平舵角曲線Fig.7 Horizontal rudder angle curve
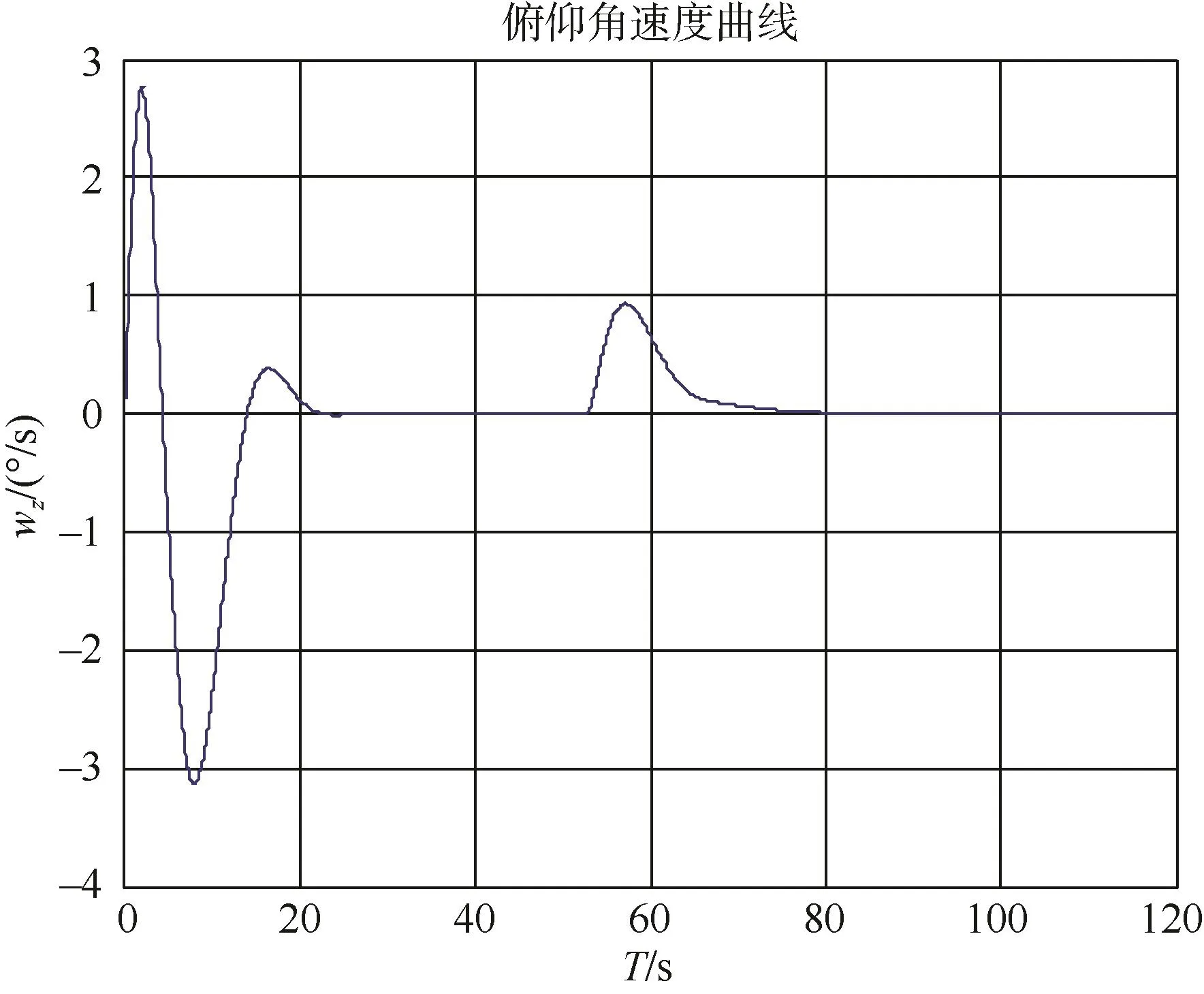
圖8 俯仰角速度曲線Fig.8 Pitch angular velocity curve
通過多次仿真計算和試參數,最終確定了Ky、Kθ和δfree,并對有無自由角進行了對比,得出了自由角的取值合適時,縱向運動無超調,但穩定時間稍長,自由角偏離理想值時,縱向控制系統會產生一定的振蕩和超調。
4 結束語
以上4種算例的仿真結果均給出了航行器在縱平面內的深度曲線、彈道曲線、攻角曲線、速度曲線、彈道傾角曲線、水平舵角曲線、俯仰角曲線和俯仰角速度曲線。從仿真結果可以看出:由于有重力、浮力和其它因素的影響,自主水下航行器的水平舵角不為0,而是有一個很小的度數,從而產生升力與負浮力等作用力相平衡。此外,自由角的取值合適時,縱向運動無超調,但穩定時間稍長,自由角偏離理想值時,縱向控制系統會產生一定的振蕩和超調。調整好自由角的大小和傳遞系數就會很好地抹除此控制算法下系統產生的振蕩和系統調整所耗費的時間。此仿真算例得出了合理的結果,已經驗證和支持了某自主水下航行器的湖上試驗,為某自主水下航行器項目實航演示樣機的研制提供理論支持,具有一定的工程參考價值。
