基于神經網絡模糊PID控制的無刷直流電機控制系統研究
2021-05-07 02:51:40賈贇賀張昕周媛媛
時代汽車 2021年7期
賈贇賀 張昕 周媛媛
摘 要:針對電動汽車行駛工況的要求,為了使電機能夠有良好的啟動特性和穩態特性,在Simulink中建立了無刷直流電機轉速-電流雙閉環控制系統仿真模型,轉速控制神經網絡和模糊控制對PID控制參數進行在線整定;電流環采用電流滯環控制,并對控制模型進行空載啟動后加載實驗。實驗結果表明,本文設計的控制系統響應速度快,無靜差,抗干擾能力強。
關鍵詞:無刷直流電機 神經網絡 模糊控制
無刷直流電機因為振動噪聲小、功率密度大和啟動性能好等優點,在電動汽車領域有著很好的應用前景。前人對無刷直流電機控制的研究做了很多工作,劉成強等人[1]將無刷直流電機控制系統的轉速環和電流環都采用PI調節器,雖然系統的響應速度快,但是電機轉速會出現超調現象,同時也會有較大的轉矩脈動。朱明祥等人[2]將矢量控制應用于無刷直流電機控制,采用模糊控制進行調速,該方法可以降低轉矩波動。張立偉等人[3]將霍爾開關與矢量控制相結合,解決了無刷直流電機在工作時噪聲等問題。Faradja等人[4]提出了無刷直流電機混沌系統的廣義哈密頓函數,應用該函數的電機可以識別不同的動力模式。
本文設計了基于轉速-電流雙閉環控制的電機控制器。在Simulink中建立了仿真模型,根據電動汽車電機的工作環境進行仿真試驗,驗證該控制器的可靠性。
1 無刷直流電機模型建立
將電機視為理想電機,且滿足下列條件:(1)氣隙磁場的分布形式為梯形分布;(2)定子齒槽的影響忽略不計;(3)電樞反應對氣隙磁通的影響忽略不計;(4)忽略電動機中的磁滯和渦流損耗;(5)三相繞組完全對稱。
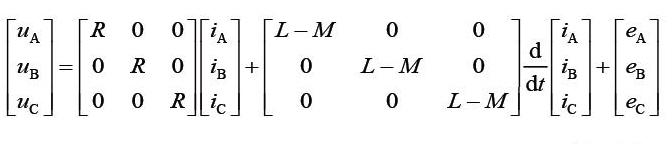
無刷直流電機的三相電壓方程為:
(1.1)
由于電機定子繞組的中性點是在理論分析中假想的,實際中的各相電壓在測量時有很大的難度。為了便于和實際物理模型進行連接,可以使用基于線電壓的數學模型。將三相電壓方程兩兩相減就可以得到線電壓方程,如式所示。
(1.2)
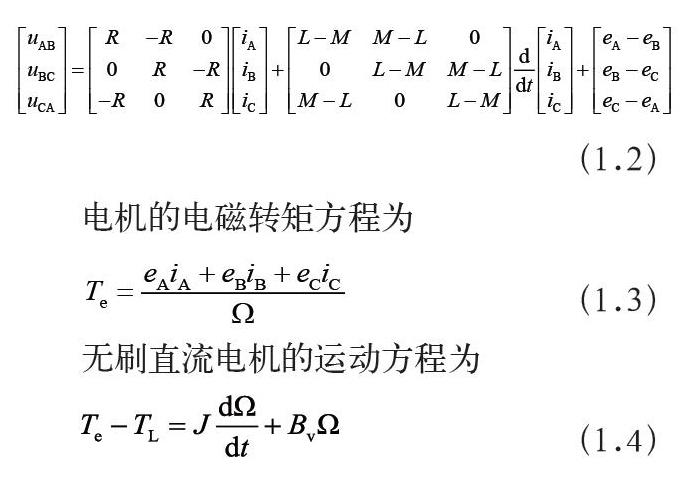
電機的電磁轉矩方程為
(1.3)
無刷直流電機的運動方程為
(1.4)
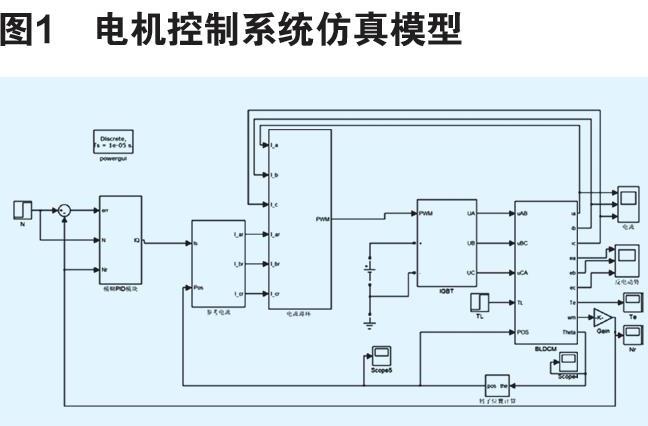
2 無刷直流電機控制系統建模
根據上一章無刷直流電機數學模型的分析,在Simulink中建立無刷直流電機控制系統仿真模型,如圖1所示。
2.1 轉速控制系統設計
控制系統采用轉速-電流雙閉環控制,轉速控制器采用神經網絡和模糊控制對PID參數在線整定,其原理如圖2所示。
本文中的模糊控制器采用多變量二維的形式,兩個輸入分別為轉速誤差E和誤差變化率EC,控制器的輸出量為PID控制系數的補償量ΔKp、ΔKi、ΔKd,如圖3所示。
輸入和輸出的模糊子集為{負大,負中,負小,零,正小,正中,正大}。誤差E的論域為[-6,6],誤差變化率EC的論域為[-10,10]。PID控制系數的補償量ΔKp、ΔKi、ΔKd的論域均為[-3,3]。模糊控制器的輸入和輸出的隸屬度函數均采用三角形函數,構建相應的模糊規則,如表1所示。
同時本文采用基于RBF網絡對PID控制參數在線整定。該算法由經過訓練的RBF神經網絡選擇PID控制參數。
采用增量式PID控制器,控制誤差為:
error(k)=rin(k)-yout(k)(1.5)
PID控制器的三項輸入參數為:
(1.6)
控制器采用的控制算法為:
u(k)=u(k-1)+Δu(k)? ? (1.7)
Δu(k)=kp(error(k)-error(k-1))+kierror(k)+kd(error(k)-2error(k-1))+error(k-2) (1.8)
神經網絡的整定指標為
E(k)=error(k)2(1.9)
kp、ki和kd的調整方法采用下降梯度法:
(1.10)
式中,為被控對象的Jacobian信息。基于徑向基神經網絡PID控制器的雅可比矩陣為:
(1.11)
根據上文對神經網絡PID控制的分析,徑向基神經網絡的核心部分是有S函數來實現,將S函數的更新函數設置為PID控制函數。
2.2 電流控制設計
電流環采用電流滯環控制,其原理如圖4所示,輸出為6路PWM信號。為了能使電機實際的輸出電流更加符合參考電流的波形,就需要將電流滯環中的閾值設置為合理值,本文選取環寬限值為±0.05。
參考電流隨著轉子位置的改變發生變化,將轉子位置的一個周期2π平均分為6份,每份轉角為π/3,在Simulink中使用S函數來實現表2所示的關系。本文中的轉子位置檢測采用rem()函數來實現。
逆變器模塊采用Simscape中的Universal Bridge模塊,把功率電子元件設置為IGBT,根據電流滯環輸出的PWM信號,判斷逆變器開關的時機,從而輸出電壓。由于本文采用線電壓方程對電機建模,所以逆變器也需要輸出線電壓。
3 仿真分析
本文中,電機的參數設置為:定子繞組電阻R=2.875Ω,定子等效電感L-M=8.5×10-3H,轉動慣量J=0.008kg·m2,黏滯摩擦系數BV=0.001N·m·s/rad,供電電壓Udc=220V,極對數np=4,額定轉速N=1200r/min。速度環控制初始參數為kp=30,ki=10,kd=0.1。
將無刷直流電機空載啟動,給定轉速為n=1200r/min。在運行到0.4s時,突然施加2.5N·m的機械負載。電機的輸出轉速、電磁轉矩、反電動勢以及三相電流的波形如圖5~圖8所示。
由圖5所示的電機輸出轉速圖可以看出,在電機啟動階段,電機的輸出轉速迅速響應,而此時的電磁轉矩迅速升高到3.2N·m。當電機達到給定轉速時,電機的三相電流非常小,電磁轉矩也降至0.25N·m,這是因為在系統運行時產生的摩擦轉矩。根據無刷直流電機運動方程分析可知,因為電機處于穩定狀態,此時電磁轉矩和機械負載轉矩的差值的計算公式為:
(1.12)
計算可得到轉矩差是0.252N·m,可以看出在空載啟動階段的仿真結果與電機運動方程一致。此時反電動勢波形也穩定為梯形波,與理論波形相符。
當電機負載突增時,轉速突然下降,并在極短地時間內恢復到目標轉速,此時電機的轉矩在短時間內迅速升高,最后穩定在2.7N·m左右,這是因為電機的電流增大使得電磁轉矩也增大,以此來平衡負載轉矩。
4 結語
本文設計了轉速基于RBF神經網絡的模糊PID控制、電流采用電流滯環控制的雙閉環控制系統,同時基于該控制系統在Simulink中建立了無刷直流電機控制系統仿真模型,并進行仿真實驗。仿真結果表明,本文設計的無刷直流電機控制系統的轉速和轉矩響應快速,對于系統擾動具有良好的抗性。
參考文獻:
[1]劉成強,徐海港.純電動車驅動電機控制系統建模與仿真研究[J].機械設計與制造,2018(S1):107-109+113.
[2]朱明祥,孫紅艷,慈文彥,竇愛玉,袁麗麗.一種改善BLDCM調速性能的模糊矢量控制策略[J].電測與儀表,2018,55(21):132-137+142.
[3]張立偉,毛學宇.基于電動汽車的無刷直流電機低扭矩脈動混合矢量驅動控制[J].電工技術學報,2015,30(S2):71-81.
[4]Philippe Faradja,Guoyuan Qi. Hamiltonian-Based Energy Analysis for Brushless DC Motor Chaotic System[J]. International Journal of Bifurcation and Chaos,2020,30(08).