基于套索傳動的五指靈巧手設計與主從控制
2021-05-06 08:01:46徐志剛趙志亮
中國機械工程 2021年8期
尹 猛 徐志剛 趙志亮,4 韓 偉,4
1.中國科學院沈陽自動化研究所機器人學國家重點實驗室,沈陽,110016 2.中國科學院機器人與智能制造創(chuàng)新研究院,沈陽,110016 3.中國科學院大學沈陽自動化研究所,沈陽,110016 4.東北大學機械工程與自動化學院,沈陽,110819
0 引言
靈巧手與人手功能相似,可以實現(xiàn)類似人手的抓握功能,自問世以來,受到了各研究機構(gòu)的高度重視[1],尤其是具有高度靈活性的靈巧手已成為機器人研究的熱點之一。仿人多指靈巧手可以作為工業(yè)領(lǐng)域的末端執(zhí)行器,也可以作為殘疾人的假肢,還可以在太空、深海、核電站等危險領(lǐng)域代替人手實現(xiàn)精準操作,具有重要的社會應用價值。
根據(jù)驅(qū)動方式的不同,靈巧手可分為電機驅(qū)動、氣動驅(qū)動、液壓驅(qū)動和功能材料驅(qū)動等,其中電機驅(qū)動方式較為常見。
Shadow手[2]為氣動驅(qū)動的代表,具有5個手指,有24個自由度,其中20個氣動驅(qū)動,4個欠驅(qū)動。它的驅(qū)動來源于一種叫做“空氣肌肉”的氣動裝置,并且將驅(qū)動部分集成放置于前臂,手指的運動更像人手。氣動空氣肌肉價格較低、對環(huán)境要求低,但剛度和動態(tài)特性都較差。SCHULZ等[3-4]將液壓驅(qū)動應用于仿人機械手,研制了可以作為假肢的靈巧手。液壓驅(qū)動的優(yōu)點在于驅(qū)動力矩大、傳動效率高、反應靈敏,可實現(xiàn)過載保護,穩(wěn)定性好,但它體積大、管線復雜、密封性要求高、制造維護成本高且易對環(huán)境造成污染。
功能材料驅(qū)動是指采用形狀記憶合金、電活性聚合物等新型材料來驅(qū)動手指關(guān)節(jié),目前已采用形狀記憶合金驅(qū)動的有Hitachi手[5]以及ENGEBERG等[6]設計的仿人手指。形狀記憶合金通過溫度改變尺寸長度,變形量難以精確控制,運動精度較差,其可靠性、通用性與性價比還有待提高。
電機驅(qū)動因其具有整體尺寸小、噪聲低、運動穩(wěn)定、易于控制、價格適中等優(yōu)點而廣受歡迎。根據(jù)電機的安裝位置,電機驅(qū)動可以分為內(nèi)置電機驅(qū)動與外置電機驅(qū)動。
DLR-HIT手[7]是內(nèi)置電機驅(qū)動的代表,每根手指具有3個自由度,共有15個自由度。電機與諧波減速器等部件集成于手指內(nèi)部,其集成度較高,具有較強的操作性和魯棒性,但結(jié)構(gòu)復雜,后期維護成本較高。類似的靈巧手有美國的Barrett手[8]和日本的Gifu手[9]。外置電機驅(qū)動多采用連桿傳動或柔索傳動進行間接驅(qū)動。
RIC手[10]為外置電機經(jīng)連桿驅(qū)動的代表,所有手指均采用四連桿結(jié)構(gòu)設計,連桿中嵌入有彈性元件來增加機械順應性,使其運動更加柔順。它具有4根手指,共有8個關(guān)節(jié),只使用一個無刷電機驅(qū)動,優(yōu)點是結(jié)構(gòu)尺寸緊湊以及設計輕量化,但外轉(zhuǎn)子電機與非反向驅(qū)動離合器的采用導致其成本較高。
Robonaut手[11-12]為外置電機經(jīng)柔索驅(qū)動的代表,整手共有5根手指,共14個自由度。其中拇指、食指、中指為靈巧指,每根手指具有4個自由度,剩余二指為抓取指,每根手指具有1個自由度。它被應用于國際空間站,旨在代替人們進行外空間操作,其抓取能力可與穿戴航天服手套的人手運動能力相當。其他采用柔索傳動的靈巧手包括意大利UBH3手[13]和法國LMS手[14]等。柔索傳動[15-16]具有布局靈活、高精度、輕量化等特點,在靈巧性精密機電裝置和伺服機構(gòu)中應用廣泛。但當傳動距離較遠時,現(xiàn)有的柔索傳動機構(gòu)主要通過傳動輪的形式來實現(xiàn),其布局異常復雜,致使系統(tǒng)的制造和維護成本較高。
套索傳動[17-19]利用空心套管引導柔索的運動路徑,可以克服已有柔索傳動機構(gòu)的缺點,可實現(xiàn)遠距離運動與經(jīng)過運動關(guān)節(jié)的傳遞,具有空間適應性強、設計成本低等優(yōu)點,已被運用于仿生靈巧手[20-21]等領(lǐng)域。已有文獻多以靈巧手為背景集中研究套索的傳動機理與位置補償,本文主要從結(jié)構(gòu)設計與主從控制方面對套索驅(qū)動靈巧手進行相關(guān)研究。
1 五指靈巧手
1.1 靈巧手構(gòu)型設計
系統(tǒng)的整體方案如圖1所示,機械系統(tǒng)由靈巧手和驅(qū)動集成組成,系統(tǒng)采用仿生設計,關(guān)節(jié)布置參照了人手的構(gòu)型。靈巧手由手掌與五根手指組成,其中食指、中指、無名指與小拇指分別具有4個自由度,大拇指具有3個自由度,靈巧手共有19個自由度。

圖1 靈巧手整體方案Fig.1 The overall scheme of the dexterous hand
手指安裝于手掌上,手掌底部與驅(qū)動集成相連。關(guān)節(jié)采用套索傳動的方式實現(xiàn)了驅(qū)動與關(guān)節(jié)的分離,套索兩端分別與關(guān)節(jié)和驅(qū)動模塊連接,驅(qū)動模塊集中安裝于驅(qū)動集成箱中,套索在手掌與手指內(nèi)走線并留有長度余量以適應運動。
1.2 關(guān)節(jié)機構(gòu)設計
手指關(guān)節(jié)的運動類型可以分為側(cè)擺和屈曲[22],人手的掌指關(guān)節(jié)為球關(guān)節(jié),可以等效為屈曲與側(cè)擺兩個關(guān)節(jié)。根據(jù)兩個關(guān)節(jié)的排布可以分為兩種方案,手指關(guān)節(jié)布局如圖2所示。圖2a所示為Gifu手[9]所采用的手指關(guān)節(jié)布局,其關(guān)節(jié)1與關(guān)節(jié)2的軸線互相垂直,模擬掌指關(guān)節(jié),關(guān)節(jié)3和關(guān)節(jié)4的軸線與關(guān)節(jié)2平行,分別實現(xiàn)中指關(guān)節(jié)和遠指關(guān)節(jié)的屈曲。圖2b所示為DLR手[7]所采用的手指關(guān)節(jié)布局,與前者不同之處是最底部關(guān)節(jié)為屈曲關(guān)節(jié),關(guān)節(jié)2為側(cè)擺關(guān)節(jié)。考慮到套索的傳動特點與靈巧手的外觀,本靈巧手采用了先側(cè)擺方案的設計。

(a) 先側(cè)擺方案

(b) 先屈曲方案
以中指為例,其結(jié)構(gòu)如圖3所示,近指關(guān)節(jié)、中指關(guān)節(jié)與遠指關(guān)節(jié)均由單套索驅(qū)動,每個關(guān)節(jié)上均安裝有扭簧與電位器。關(guān)節(jié)處的扭簧一方面為復位運動提供動力,另一方面保持手指關(guān)節(jié)的初始伸展狀態(tài)。扭簧的扭矩值主要與扭簧的中徑、材料的彈性模量、圈數(shù)、受力轉(zhuǎn)角等有關(guān)。扭簧的扭矩:
(1)
式中,Mts為扭簧的扭矩值,N·mm;E為材料的彈性模量,MPa;d為扭簧的線徑,mm;φ為受力轉(zhuǎn)角,(°);D為扭簧的中徑,mm;n為扭簧有效圈數(shù)。

(a) 結(jié)構(gòu)示意圖

(b) 結(jié)構(gòu)剖面圖
扭簧的最大扭矩出現(xiàn)在手指近指關(guān)節(jié)處,為保證關(guān)節(jié)能夠有效復位,經(jīng)計算初步選用碳素鋼扭簧,有效圈數(shù)為3,線徑0.5 mm。靈巧手在抓取運動過程中,需要位置傳感器的反饋信號進行精確操控。設計的靈巧手需要高度的擬人性,故關(guān)節(jié)空間較小,因此本文采用了體積小、質(zhì)量輕、抗干擾能力強的電位式傳感器。
靈巧手關(guān)節(jié)設計如圖4所示,食指、中指、無名指與小拇指均包含4個關(guān)節(jié),分別為基關(guān)節(jié)、近指關(guān)節(jié)、中指關(guān)節(jié)與遠指關(guān)節(jié)。大拇指包含3個關(guān)節(jié),分別為基關(guān)節(jié)、近指關(guān)節(jié)與遠指關(guān)節(jié)。其中基關(guān)節(jié)為側(cè)擺關(guān)節(jié),其余關(guān)節(jié)均為屈曲關(guān)節(jié)。5個基關(guān)節(jié)由雙套索機構(gòu)實現(xiàn)傳動,為了簡化結(jié)構(gòu)、減少套索數(shù)量,其余關(guān)節(jié)均由單套索機構(gòu)實現(xiàn)傳動。

圖4 機械臂關(guān)節(jié)設計Fig.4 Joint design of the manipulator
1.3 套索傳動設計
雙套索傳動機構(gòu)主要由套管、柔索與預緊裝置等組成,如圖5a所示,驅(qū)動輪安裝在舵機輸出軸上,從動輪置于關(guān)節(jié)中。驅(qū)動輪上按順時針與逆時針方向分別纏繞柔索,兩根柔索經(jīng)過擋板b后再分別經(jīng)過套管a與套管b,然后經(jīng)擋板a后固定在從動輪上,這種傳動方式被應用于驅(qū)動5根手指的5個側(cè)擺關(guān)節(jié)。雙套索的傳動過程如下:當驅(qū)動輪順時針轉(zhuǎn)動時,套管a中的柔索會跟隨向右運動,套管b中的柔索會跟隨向左運動,從而帶動從動輪順時針轉(zhuǎn)動;當驅(qū)動輪逆時針轉(zhuǎn)動時,套管a中的柔索會跟隨向左運動,套管b中的柔索會跟隨向右運動,從而帶動從動輪逆時針轉(zhuǎn)動。當系統(tǒng)處于靜止時,套管a中柔索上的拉力能夠抵消從動輪受到的順時針方向扭矩,套管b中柔索上的拉力能夠抵消從動輪受到的逆時針方向扭矩。
單套索傳動機構(gòu)主要由套管、柔索與扭簧等組成,如圖5b所示,驅(qū)動輪安裝在舵機輸出軸上,從動輪置于關(guān)節(jié)中。柔索一端固定在驅(qū)動輪上,繞驅(qū)動輪纏繞后經(jīng)擋板進入套管,經(jīng)過另一擋板后纏繞并固定在從動輪上,從動輪上安裝有扭簧,這種傳動方式被應用于靈巧手除5個側(cè)擺關(guān)節(jié)外的其他關(guān)節(jié)。單套索的傳動過程如下:當驅(qū)動輪逆時針轉(zhuǎn)動時,套管中的柔索跟隨向右運動,從而帶動從動輪逆時針轉(zhuǎn)動,同時扭簧被壓縮儲能;當驅(qū)動輪順時針轉(zhuǎn)動時,套管中的柔索會跟隨向左運動,從動輪在扭簧作用下順時針轉(zhuǎn)動。當系統(tǒng)處于靜止時,柔索上的拉力能夠抵消從動輪受到的順時針方向扭矩,扭簧能夠抵消從動輪受到的逆時針方向扭矩。

(a) 雙套索傳動機構(gòu)

(b) 單套索傳動機構(gòu)圖5 套索傳動機構(gòu)Fig.5 Mechanism of tendon-sheath transmission
兩種傳動機構(gòu)均安裝有螺栓預緊裝置,預緊裝置可以拉緊柔索來有效減小傳動空回。同時,采用編碼器與電位器來反饋主動輪與從動輪的角度位置信號,可以實現(xiàn)運動的雙閉環(huán)控制。套索傳動可以實現(xiàn)驅(qū)動電機的后置,使多關(guān)節(jié)串聯(lián)系統(tǒng)更加輕量化,具有結(jié)構(gòu)簡單、布局靈活的優(yōu)點。
1.4 驅(qū)動集成設計
驅(qū)動集成箱的結(jié)構(gòu)如圖6所示,驅(qū)動模塊由舵機與驅(qū)動輪組成,19個關(guān)節(jié)的驅(qū)動模塊與預緊裝置被分層安裝在不同支撐板上,各支撐板通過支撐架連接。支撐板中心加工有通孔,套索通過通孔與手掌后進入手指。通過緊湊型電機的選用與電機位置的優(yōu)化布局可以減小集成箱的體積。

圖6 驅(qū)動集成箱結(jié)構(gòu)Fig.6 Structure of the driver integration
2 運動學與工作空間分析
多指運動學分析的是靈巧手抓取物體運動與各手指運動之間的關(guān)系,根據(jù)靈巧手運動學特性建立運動學簡化模型,通過工作空間仿真驗證設計的合理性。
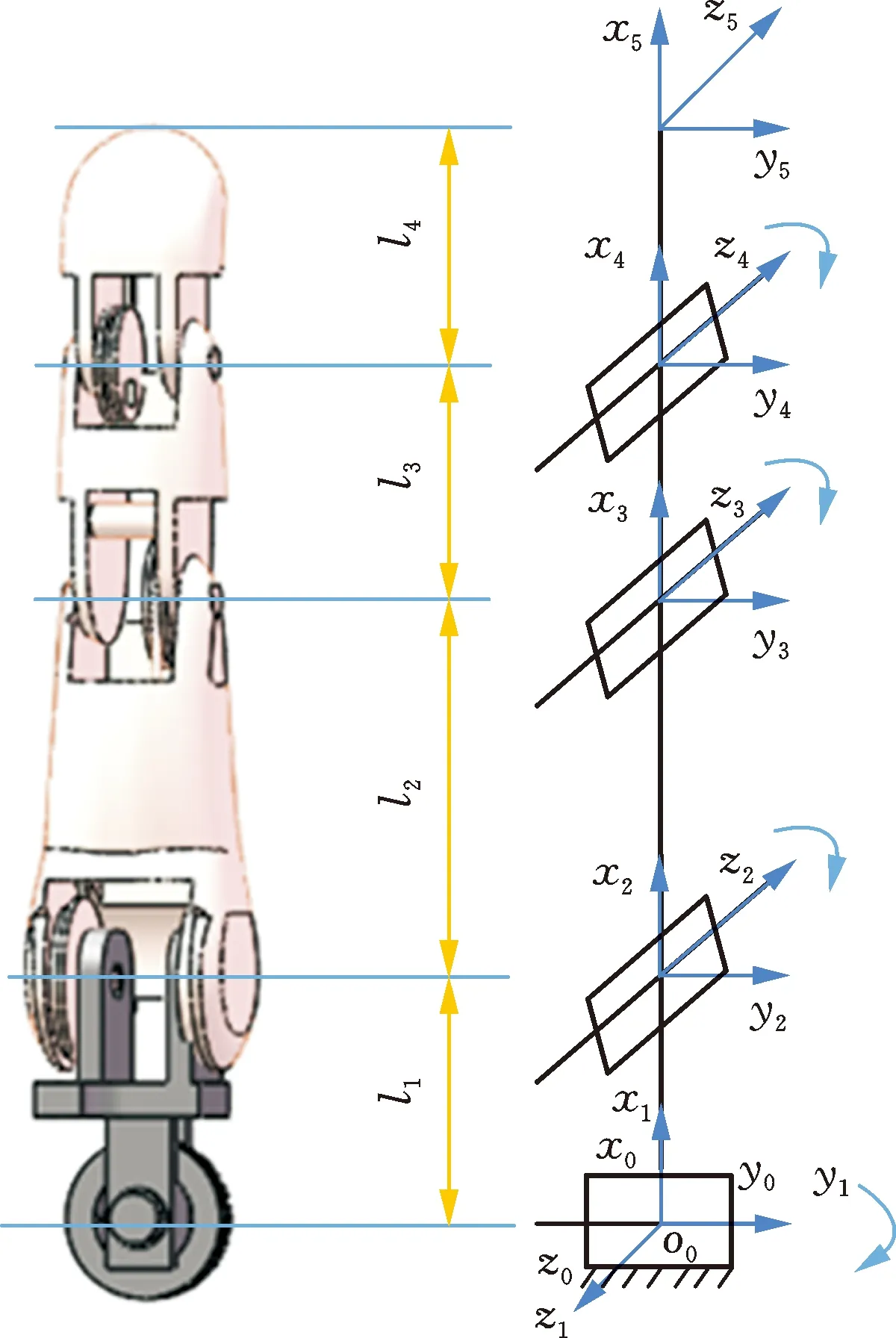
圖7 食指結(jié)構(gòu)簡圖Fig.7 Structure of the index finger
單個手指可以看作是一個多關(guān)節(jié)串聯(lián)機器人,以食指為例,各指節(jié)長度分別為a1、a2、a3、a4,基于旋量理論建立手的運動學模型。如圖7所示,o0x0y0z0為基坐標系,其余為動坐標系,各指節(jié)長度分別為l1、l2、l3、l4。靈巧手各關(guān)節(jié)均可視為鉸接,以旋轉(zhuǎn)中心為軸,定義順時針轉(zhuǎn)動時角度為正、逆時針轉(zhuǎn)動時角度為負。關(guān)節(jié)處于圖7所示的初始位置,其指尖坐標系與基坐標系的變換:
(2)
L=l1+l2+l3+l4
定義各個關(guān)節(jié)的運動旋量:
(3)
(4)
(5)
(6)
式中,ω1、ω2、ω3與ω4分別為各關(guān)節(jié)轉(zhuǎn)動量;q1、q2、q3與q4分別為各關(guān)節(jié)轉(zhuǎn)軸上任意點的坐標。
運動方程:
(7)

記cl=cosθl,sl=sinθl,clm=cos(θl+θm),slm=sin(θl+θm),clmn=cos(θl+θm+θn),sljn=sin(θl+θj+θn),其中l(wèi),m,n=1,2,3,4。計算得到正運動學方程:
(8)
式(8)中,位置變量表達式為
(9)
工作空間是評價靈巧手工作能力的重要性能指標,是對指尖工作區(qū)域的描述,可以用手指末端到達位置點的集合來描述工作空間。建立靈巧手的坐標系如圖8所示,分別在基關(guān)節(jié)、近指關(guān)節(jié)、中指關(guān)節(jié)、遠指關(guān)節(jié)以及指尖處建立坐標系,靈巧手的基坐標設在手掌底部中間位置。
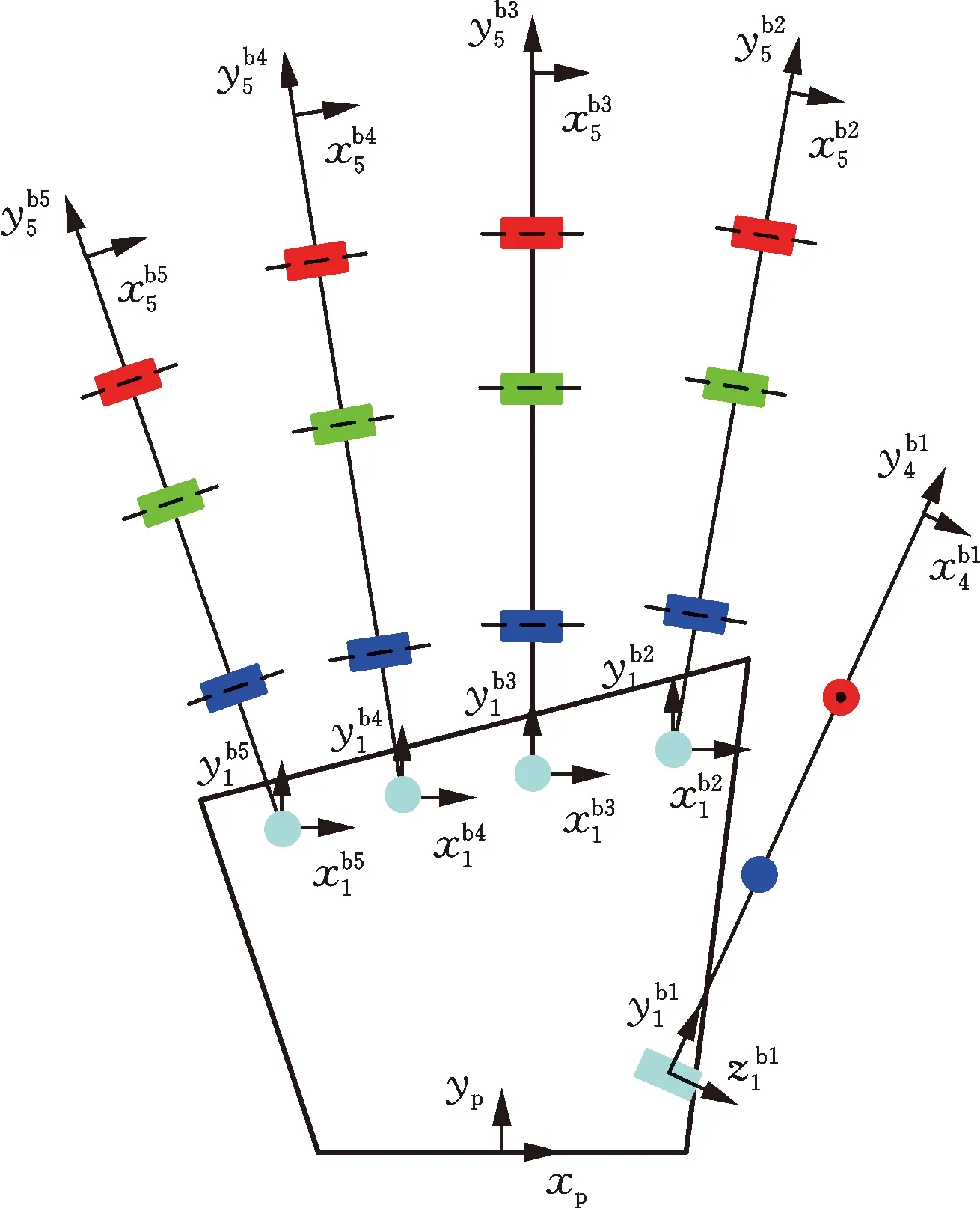
圖8 靈巧手運動學模型Fig.8 Kinematic model of the dexterous hand
基于各個關(guān)節(jié)的運動范圍可以得到靈巧手各指的工作空間,如圖9所示。由圖9可知,食指、中指、無名指與小拇指的工作空間與大拇指工作空間均有交集,驗證了抓取物體的有效性。其中食指與大拇指工作空間交集最大,中指和無名指與大拇指工作空間交集次之,小拇指與大拇指工作空間交集最小,說明抓取物體時大拇指與食指配合發(fā)揮主要作用。由結(jié)果可知,靈巧手與人手具有相似的工作空間,末端可以到達設計工作空間的所有點,故構(gòu)型與尺寸設計合理。

(a) 小拇指

(b) 無名指

(c) 中指
(d) 食指
3 主從控制研究
本文采用主從控制方法來對五指靈巧手進行控制,在人手上安裝彎曲傳感器來反饋手指彎曲角度,建立彎曲角度和靈巧手之間的映射關(guān)系,并根據(jù)此映射關(guān)系實現(xiàn)主手對從手的完全控制。
采用彎曲傳感器[23-24]來反饋手指彎曲度,傳感器串聯(lián)固定電阻,傳感器兩端電壓作為輸入信號接入控制器。如圖10所示,傳感器的兩端分別固定在指尖和指根上,手指完全展開時傳感器電阻最小,手指最大彎曲時傳感器電阻值隨著手指的彎曲而增大。為了方便比較不同手指彎曲特征的變化規(guī)律,采用線性函數(shù)對原始輸入進行歸一化處理至[0°, 90°]范圍。具體轉(zhuǎn)換式為
(10)
式中,xi為彎曲傳感器兩端的測量電壓;yi為線性函數(shù)轉(zhuǎn)換后的值;xi,max、xi,min分別為測量電壓采集數(shù)據(jù)的最大值和最小值;i=1,2,…,5,分別對應大拇指、食指、中指、無名指與小拇指。

圖10 手勢捕捉系統(tǒng)Fig.10 Gesture capture system
為了更精確地得到每個彎曲傳感器的輸出值,考慮到傳感器的響應時間特性及實驗誤差,采用多組實驗對式(10)進行標定,標定實驗組序號為j,n次實驗后取平均值作為實驗的有效數(shù)據(jù)。數(shù)據(jù)的最小及最大值分別如下:
(11)
定義人手彎曲傳感器輸出值歸一化矩陣為Y,可得人手姿態(tài)信息:
Y=(y1,y2,y3,y4,y5)T
(12)
單根手指只能反饋一個信號,但手指實際控制需要3個關(guān)節(jié)角度信號。引入主從映射[25-26]來求解關(guān)節(jié)角度,這里通過比例系數(shù)來得到手指i的r關(guān)節(jié)彎曲角度:
(13)


(14)
人手與機器人靈巧手在尺寸上的不一致,會使靈巧手產(chǎn)生運動誤差。為了更好地實現(xiàn)對靈巧手的控制,針對主從手尺寸不一致的問題,引入主從手指長度比例關(guān)系:
(15)

4 樣機實驗
4.1 樣機平臺
靈巧手樣機實驗平臺如圖11所示,靈巧手結(jié)構(gòu)采用尼龍材料3D打印制作。驅(qū)動電機采用LX-16A串行總線自帶減速器的舵機(最大輸出扭矩19.5 kg·cm),舵機帶有溫度監(jiān)測功能,底部可安裝散熱裝置。柔索采用直徑為0.5 mm的鋼絲繩,套管采用圓形彈簧絲繞成的外徑1.2 mm、內(nèi)徑0.8 mm的螺旋套管。

圖11 靈巧手實驗樣機Fig.11 Experimental prototype of the dexterous hand
靈巧手的控制系統(tǒng)采用NI-cRIO-9067作為下位機,系統(tǒng)的硬件結(jié)構(gòu)如圖12所示。首先在上位機用LabVIEW軟件編寫控制程序,然后通過CAN接口下載到運行實時系統(tǒng)的下位機執(zhí)行。手指彎曲信號由Flex 4.5彎曲傳感器測量后輸入NI-9205模塊,關(guān)節(jié)角度反饋信號由電位器測量后輸入NI-9205模塊,運動控制信號由NI-9264模塊輸出到電機驅(qū)動器。彎曲傳感器電阻在60~110 kΩ間變化,實時反饋與數(shù)據(jù)監(jiān)測的頻率設置為1 kHz。

圖12 樣機控制系統(tǒng)Fig.12 Control system of the experimental prototype
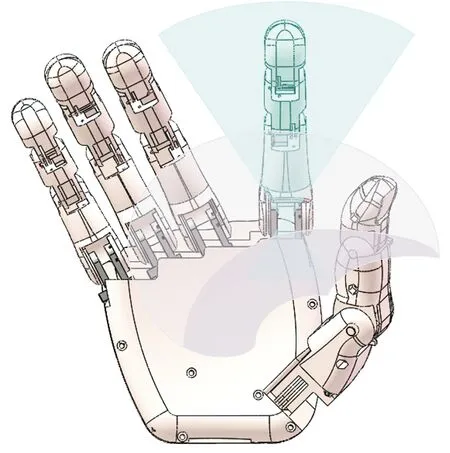
4.2 靈巧手運動實驗
為了測試套索驅(qū)動靈巧手的性能,通過直接控制舵機對靈巧手的側(cè)擺關(guān)節(jié)、近指關(guān)節(jié)、中指關(guān)節(jié)和遠指關(guān)節(jié)進行運動實驗,如圖13所示。由實驗可知,所設計的靈巧手具有較好的運動靈活性,套索的應用能夠有效避免干涉,實現(xiàn)各關(guān)節(jié)的解耦獨立控制。

(a) 初始姿態(tài)

(b) 兩側(cè)張開

(c) 單側(cè)擺動

(d) 近指轉(zhuǎn)動90°

(e) 中指轉(zhuǎn)動90°

(f) 遠指轉(zhuǎn)動90°
4.3 抓取控制實驗
通過實際測量人手與所控制靈巧手的尺寸,對尺寸比例系數(shù)mi進行標定,結(jié)果如表1所示。通過人手五指上安裝的彎曲傳感器作為輸入信號,每根手指均進行了100次伸展彎曲實驗,記錄傳感器反饋電壓信號的最大值與最小值,由式(11)求得各手指反饋電壓標定的最大值與最小值,結(jié)果見表1。

表1 手勢識別相關(guān)參數(shù)Tab.1 Parameters of gesture recognition

(a)抓取水瓶動作1

(b)抓取水瓶動作2

(c)抓取水瓶動作3

(d)抓取蘋果動作1

(e)抓取蘋果動作2

(f)抓取蘋果動作3
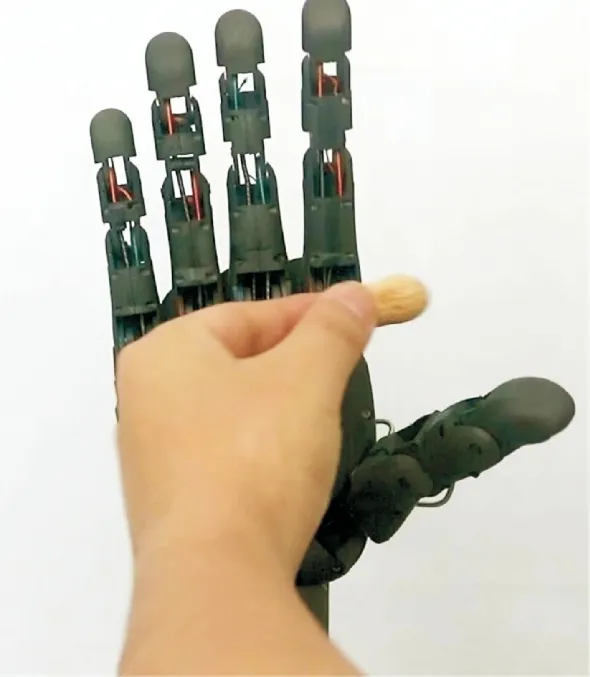
(g)抓取花生動作1

(h)抓取花生動作2

(i)抓取花生動作3

表2 主從映射相關(guān)參數(shù)
如圖15所示,其中0~10 s為抓取水瓶曲線,10~20 s為抓取蘋果曲線,20~32 s為抓取花生曲線。由曲線可知,抓取水瓶時,各指關(guān)節(jié)均有明顯運動,其中大拇指與食指各關(guān)節(jié)彎曲均較小,

(a) 彎曲傳感器信號

(b) 大拇指關(guān)節(jié)運動

(c) 食指關(guān)節(jié)運動

(d) 中指關(guān)節(jié)運動

(e) 無名指關(guān)節(jié)運動

(f) 小拇指關(guān)節(jié)運動
中指關(guān)節(jié)彎曲角度較大,各指均發(fā)揮抓取作用;抓取蘋果時,各指關(guān)節(jié)也均有明顯運動,其中大拇指與食指各關(guān)節(jié)彎曲均較小,中指與小拇指關(guān)節(jié)彎曲角度較大,各指均發(fā)揮抓取作用;抓取花生時,大拇指與食指各關(guān)節(jié)彎曲較大,中指、無名指與小拇指關(guān)節(jié)彎曲角度較小,抓取主要由大拇指與食指配合完成。特別地,在20~32 s時,yi值小于式(14)定義的臨界值y′i,與其他圖相比,圖15b中的綠色曲線與紅色曲線更加接近,圖15c中綠色與紅色曲線也更加接近且數(shù)值明顯大于藍色曲線數(shù)值,說明在抓取花生時,大拇指與食指的遠指與近指關(guān)節(jié)相較于其他手指的關(guān)節(jié)運動更加明顯,通過抓取過程的變比例系數(shù)控制實現(xiàn)了對體積較小物體的有效抓取。由實驗可知,所設計的靈巧手能有效抓取圓柱與圓球等各類物品,通過基于彎曲傳感器的主從控制可以實現(xiàn)對五指靈巧手的控制。
5 結(jié)論
本文將套索傳動應用于靈巧手,提出了一種電機后置的19-DOF擬人輕型靈巧手。參照人手的構(gòu)型確定了靈巧手的構(gòu)型,對驅(qū)動模塊與手指關(guān)節(jié)進行了設計。建立了靈巧手的多指運動學模型,并對末端運動空間進行了仿真。基于彎曲傳感器對主從映射算法進行了研究,實現(xiàn)了抓取的主從跟蹤控制。搭建靈巧手樣機并進行關(guān)節(jié)運動實驗,驗證了所設計靈巧手的運動靈活性。通過抓取實驗驗證了主從映射控制算法的有效性。
實驗結(jié)果表明,基于套索傳動的靈巧手具有可行性,未來可應用于人形機器人以及對靈巧手的靈活性有較高要求的場景,鑒于其成本低的優(yōu)點,還可以作為科普或者教學工具。
齒輪與套索傳動的應用使關(guān)節(jié)控制具有空回遲滯與非線性的特點,主從控制要達到較高的精度也需要非線性補償,下一步工作將重點對控制算法進行研究。