基于滑模控制方法的光伏系統MPPT策略
2021-05-04 02:01:58王仁明胡夢帆張赟寧
電源技術 2021年4期
關鍵詞:系統
王仁明,胡夢帆,張赟寧
(三峽大學電氣與新能源學院,湖北宜昌 443000)
光伏系統利用光伏電池的光生伏特效應將太陽輻射能轉化為電能,因其輸出特性受外界環境的影響較大,使得其光電能轉換效率較低。在環境溫度和光照強度變化時,為了維持光伏電池的最大輸出功率,最大功率點跟蹤(MPPT)技術成為了光伏系統研究不可或缺的內容。
MPPT 控制是使光伏發電系統在復雜的工作環境中獲得較好的性能的主要手段。MPPT 通過控制Boost 電路的占空比來使系統的工作點穩定在MPP 處。本文分析了孤立光伏電池(PV)系統的MPPT 控制問題,該系統結構如圖1 所示,其主要組件有:PVG(將太陽能轉換成電能)、Boost 電路(將PVG產生的電壓提升為負荷需要的電壓)和MPPT 控制器。

圖1 光伏發電MPPT控制系統原理圖
常用的MPPT 控制算法有恒電壓法[1]、擾動觀察法[2]、電導增量法[3]、改進型電導增量法[4]和模糊邏輯控制方法[5]等。這些算法雖然結構簡單,在標準工況下控制精度高,但當天氣條件快速變化時,跟蹤速度和跟蹤可靠性之間存在缺陷。由于滑模控制(SMC)對非線性系統具有較好的魯棒性和較快的收斂速度,也被用于光伏系統的MPPT[6-8],以便克服傳統MPPT 控制算法的不足。文獻[6]提出的滑模控制方法將冪次趨近律和等效控制結合,改善了系統的動態性能。文獻[7]提出的神經網絡-滑模算法利用神經網絡逼近控制器的不確定部分,有效消去了非線性不確定因素對控制系統的影響。文獻[8]提出的SMC 策略達到了預期控制效果,結果優于擾動觀察法等傳統方法。基于此,本文提出了一種用于光伏系統MPPT 的滑模控制方法,該方法適用于在光照強度和電池溫度變化時調節系統的最大輸出功率。首先,對系統的最大功率點處電壓值進行估計,然后將實際輸出電壓值與計算得到電壓估計值之間的差值作為滑模控制器的輸入信號,通過滑模控制器的輸出來調節占空比,以實現最大功率點跟蹤。
1 光伏發電系統
1.1 光伏電池數學模型

在光伏電池模型里,光伏電池的輸出電流I與輸出電壓V之間的數學關系式[9]為:
式中:Iph是光生電流;I0是飽和電流;n為理想因子,1<n<5;k是玻爾茲曼常數,其值為1.38×10-23J/K;q是電子電荷量,其值為1.6×10-19C;θ 是電池溫度。
式(1)可表示為:

式中:b=q/(nkθ)。
當光伏電池處于短路時,短路電流Isc=Iph。當光伏電池處于開路時,式(2)簡化為:

式中:Voc是光伏電池的開路電壓。
當光伏電池在最大功率點時,I=Im,V=Vm,由式(2)可得:

式中:Im是最大功率點處電流值;Vm是最大功率點處電壓值。因此,光伏電池的數學模型為:
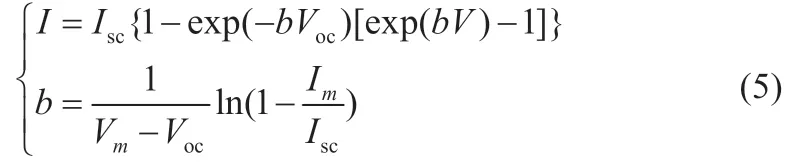
其中,參數Isc、Voc、Im、Vm和b均為標準工況(S=1 000 W/m2,θ=25 ℃)下的值,均為常數。
1.2 Boost 變換器模型
DC-DC 升壓電路用于連接光伏電池與負載,以便控制直流輸出電壓,同時,也可以調節光伏電池的最大功率點。Boost 電路如圖2 所示。

圖2 Boost電路圖
根據其IGBT 開關管的不同狀態,Boost 變換器可包括兩個階段。
階段一:當IGBT 合上,二極管斷開,電感L從電源vin獲得能量,負載R從電容C得到能量。此時,由基爾霍夫定律可得如下狀態方程:

階段二:IGBT 斷開,二極管形成通路,電源vin和電感L一起對電路的其他元件充電。此時,電路動態方程為:

式(10)的靜態解[10]可表示為:

式中:D表示占空比。
假設Boost 電路的所有原件均是理想元件,即它的轉換效率為100%,則可以推出:

式中:Rpv為光伏電池的等效電阻。
2 MPPT 控制器
為了便于SMC 設計,需要首先估計出MPP 處的電壓Vpmax,然后用光伏電池的實際輸出電壓Vpv與估計值Vpmax的差值e=Vpv-Vpmax作為SMC 控制器的輸入,使之控制Boost 電路的占空比,從而控制MPP。
2.1 最大功率點電壓Vpmax的估計
由于式(5)是在標準條件下的光伏電池數學模型,但光伏系統通常工作在可變的環境中,即Voc、Vm、Isc、Im和b均隨S和θ的變化而變化。于是,用另一組與S和θ 有關的變量Voc'、Vm'、Isc'、Im'和b'分別替代Voc、Vm、Isc、Im和b,則式(5)修正為:
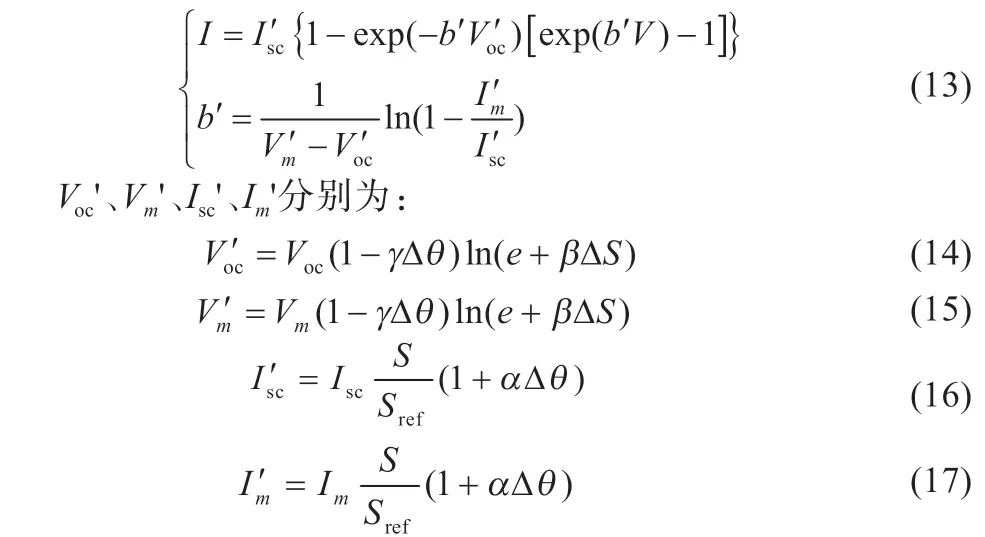
式中:Δθ=θ-θref;ΔS=S/Sref-1。
其中,θref=25 ℃,Sref=1 000 W/m2,α=0.002 5 ℃,β=0.5,γ=0.002 88/℃。S和θ 的值可以由光照傳感器和溫度傳感器測量。

式(22)即為MPP 光伏電池的電壓。它與電池的工作環境S和θ 有關。取參數值Voc=66 V,Vm=54.2 V,Isc=25.44 A,Im=23.25 A,代入式(22)可得Vpmax與環境參數S和θ 的關系如圖3所示。
2.2 滑模控制器設計
在獲得了Vpmax之后,便可以利用Vpmax來設計滑模控制器。取滑模面為s=e=Vpv-Vpmax,令控制律為
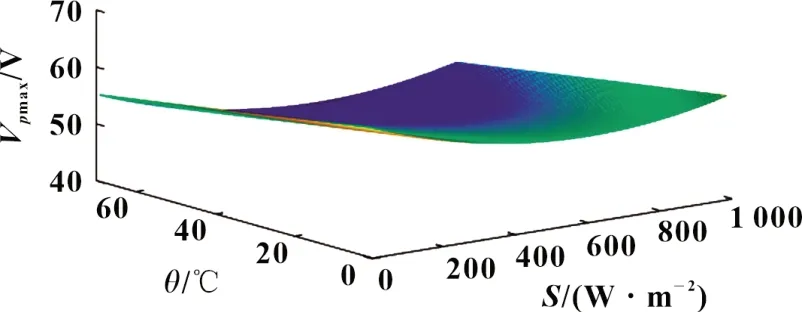
圖3 Vpmax與環境參數S和θ 的關系圖
為了證明系統符合滑動模態的可達性條件,取Lyapunov函數為,所以,當s>0,即開關閉合時,意味著占空比將增加。由式(12)可知,Rpv將會下降,通過分析如圖4 所示的光伏系統動態I-V特性曲線可知,光伏電池的輸出電流I將會增加,從而由式(1)可知光伏電池的輸出電壓將減小;于是可以推出當輸出電壓增大/減小時,相對應的輸出電流I減小/增大。因此在s>0 時,有和同理,當s<0,即開關打開時,意味著占空比將減小,Rpv將會增加;由光伏系統的動態I-V特性圖可知,光伏電池的輸出電流I將會減小,相反光伏電池的輸出電壓Vpv將會增加。假如負載Rout變大,則電壓Vpv增加以及電流I減少,得到

圖4 I-V特性曲線和MPPT跟蹤過程
由Lyapunov 穩定性理論得到s可以達到s=0 以上,這意味著系統可以到達期望的最大功率點處的電壓值。
3 仿真結果分析與討論
本文采用Matlab/Simulink 平臺搭建系統的仿真模型,如圖5 所示。仿真參數設置如下:Voc=66 V,Vm=54.2 V,Isc=25.44 A,Im=23.25 A;電容C1和C2的電容值均為2 mF,電感為0.01 H,純電阻負載R=500 Ω。
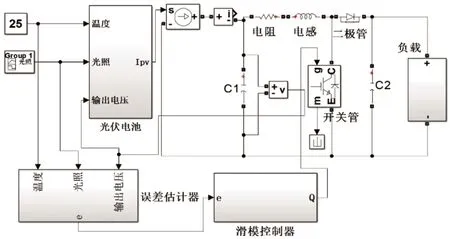
圖5 基于Simulink的光伏系統仿真模型
為了研究本文提出的基于最大功率點電壓計算與滑模控制的算法的效果,將采用對比組,對兩種方法在溫度不變、光照強度改變,光照強度不變、溫度改變以及在溫度不變、光照強度改變且負載變化這三種情況下進行跟蹤仿真。
3.1 溫度不變而光照強度改變
假設θ=25 ℃不變,光照強度S在0 s 時是400 W/m2,0.3 s降為300 W/m2。圖6 是利用本文的設計方法仿真的系統輸出功率隨光照強度S改變時的變化情況。由圖6 可知,在仿真試驗的初始階段,光照強度為400 W/m2,光伏系統在0.03 s 左右跟蹤到了最大功率點,其光伏系統的輸出功率維持在445.2 W 左右,且達到穩態時系統處于非振蕩狀態。
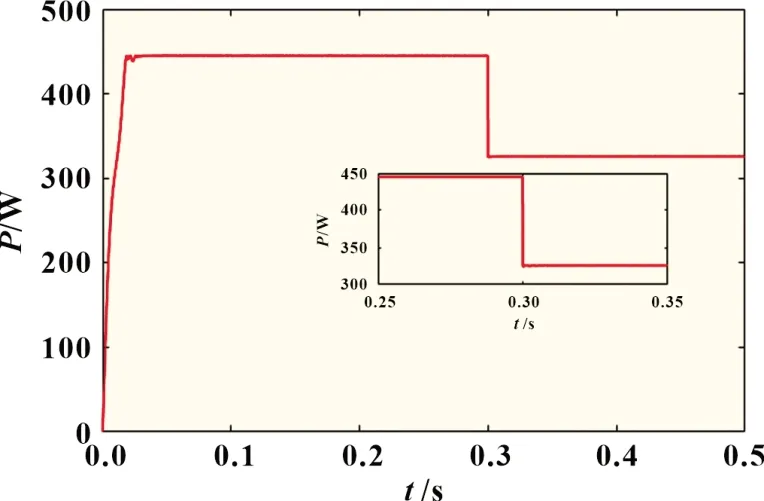
圖6 基于滑模控制算法的系統輸出功率
為了表明本文設計方法的優越性,在同樣條件下,基于傳統的擾動觀察法的仿真曲線如圖7 所示,其輸出功率變化曲線在0.04 s 達到最大功率點,存在明顯的振蕩。在0.3 s 時,光照強度由400 W/m2下降到300 W/m2,基于滑模控制的光伏系統約在0.01 s 后再次處于穩態,該系統的輸出功率變化曲線較平穩;而傳統的擾動觀察法在約為0.02 s 后再次處于穩態,且輸出功率曲線波動較大。基于滑模控制方法的光伏系統平均跟蹤時長分別約是0.02 s,而基于傳統的擾動觀察法的光伏系統平均跟蹤時長約為0.03 s;從功率曲線的平穩程度看,基于滑模控制方法的光伏系統也優于基于傳統的擾動觀察法的光伏系統。
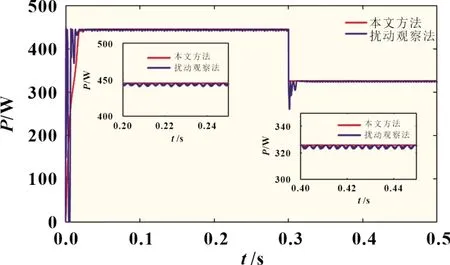
圖7 兩種方法在溫度不變光照強度改變時的輸出功率
3.2 光照強度不變而溫度逐漸上升
考慮到實際環境中光伏電池的溫度在光照強度不變時都存在一個緩慢上升的過程,假設S=1 000 W/m2恒定,溫度θ在0 s 時是-5 ℃,0.1~0.4 s 緩慢上升到45 ℃,溫度的變化如圖8 所示。
圖9 是利用本文的設計方法仿真的系統輸出功率隨溫度θ 改變時的變化情況。由圖9 可知,在起始溫度為-5 ℃的條件下,系統跟蹤到最大功率值并達到穩態的時間約為0.03 s,穩態時,系統功率曲線的平穩程度較好。

圖8 光照強度不變時的溫度上升情況
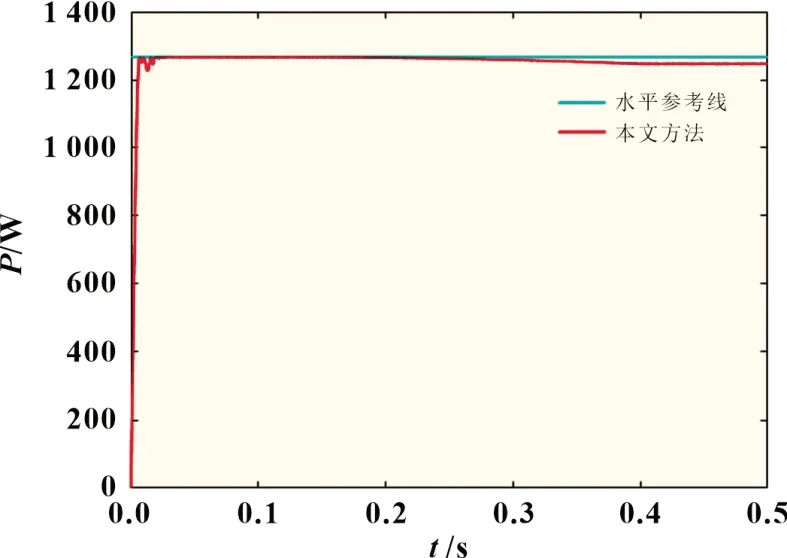
圖9 基于滑模控制算法的系統輸出功率
在同樣條件下,基于傳統的擾動觀察法的仿真曲線如圖10 所示,其輸出功率曲線在0.05 s 達到最大功率點并存在明顯的振蕩。在0.1~0.4 s,光伏電池的溫度緩慢上升,在此過程中,基于滑模控制方法的功率曲線的平穩程度較好,而傳統的擾動觀察法輸出功率曲線波動明顯。基于滑模控制方法的光伏系統跟蹤速度快于傳統的擾動觀察法,從功率曲線的平穩程度看,基于滑模控制方法的光伏系統功率曲線振蕩不明顯,而基于傳統的擾動觀察法的功率曲線有明顯的振蕩。

圖10 兩種方法在光照強度不變而溫度改變時的輸出功率
3.3 溫度不變而光照強度改變且負載改變
當θ=25 ℃不變,光照強度S在0 s 時是400 W/m2,0.3 s 時降為300 W/m2,負載在0.4 s 時從500 Ω 增加到700 Ω 時,兩種方法的仿真曲線如圖11 所示,在光伏電池的光照強度為400 W/m2時,基于滑模控制算法的系統跟蹤到最大功率值并達到穩態的時間是傳統擾動觀察法的一半,為0.03 s;在光伏電池的外界光照強度減弱至300 W/m2時,基于滑模控制的光伏系統約在0.01 s 后再次處于穩態,而傳統的擾動觀察法在約為0.03 s 后再次處于穩態;在負載突然增加至700 Ω 時,本文的方法沒有出現任何功率曲線突變,而擾動觀察法在負載變化時功率曲線有波動,恢復到之前的穩態所需的時間是0.03 s左右。所以本文方法抗外界擾動的能力較強。

圖11 兩種方法在溫度不變光照和負載改變下的輸出功率
4 結論
本文研究了光伏發電系統如何有效地通過Boost 變換器供電于負載的問題。為了改善系統的供電效率和性能,提出了基于滑模控制方法對最大功率點進行跟蹤與升壓DC-DC變換電路相結合的綜合策略。首先計算在任意光照條件和電池溫度環境下的光伏系統的最大功率點電壓估計值,然后將實際輸出電壓與計算得到電壓估計值的差值作為滑模控制器的輸入信號來實現MPPT。仿真結果顯示該方法比傳統的擾動觀察法具有追蹤速度快、穩態精度高、抗擾動能力強等優點。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
