空間抓捕系統繩網的設計與研制
2021-04-28 08:39:04許望晶王立武唐明章王文強李少騰
航天器工程 2021年2期
許望晶 王立武 唐明章 王文強 李少騰
(1 中國航天科技集團有限公司航天進入、減速與著陸技術實驗室,北京 100094)(2 北京空間機電研究所,北京 100094)
空間碎片主動清除方式(Active Debris Removal,ADR),尤其是地球靜止軌道廢棄衛星清理已成為航天界關注的熱點問題。美國國家航空航天局空間碎片計劃負責人Johnson[1]指出自2020年起,每年清除5~20個大型空間碎片就可抑制空間碎片總量的增長,從而保證未來空間環境不再持續惡化。至此,空間碎片主動清除被提上了各國空間技術的發展日程。
目前國內外空間碎片主動清除方式主要有推移離軌、增阻離軌以及抓捕離軌等[2],空間繩網系統屬于抓捕離軌方式,其以在非合作目標高可靠、遠距離捕獲等方面的突出優勢,為空間碎片清除操作提供了一種新的解決思路,也為未來在軌服務提供了一種有效手段。空間繩網能夠實現大范圍的可容錯捕獲,對目標的適應性強,同時也可降低對目標探測識別與消旋的要求,與傳統的機械臂捕獲離軌方式相比,繩網捕獲具有壓縮體積小、發射質量輕、抓捕距離遠、容錯范圍大、對載體影響小等突出優勢。目前多國研究機構啟動了空間繩網抓捕的研究項目[3-4],典型的有美國的“抓捕、取回、固定有效載荷”可展開網捕捉器(GRASP),歐洲航天局的機械人地球靜止軌道復位器項目(ROGER)[5]及其后續項目主動碎片移除計劃(e.Deorbit)[6-8]。2019年3月,歐空局完成了世上首次空間繩網在軌捕獲驗證試驗,通過彈射6個重約1 kg的質量塊將繩網拉出展開,繩網最大展開口徑為5 m,將6 m外的模擬目標捕獲,證明了繩網在軌捕獲的可行性。
國內也一直在跟蹤、研制空間抓捕系統,其中繩網作為核心的抓捕執行部件尤為關鍵。在實際研制時,選用什么樣的繩網結構、采用什么的材料、怎么編制繩網以及繩網如何折疊包裝可有序拉出展開,這些都是在繩網設計和研制過程中需要解決的難題。本文結合空間繩網工程樣機研制情況,針對這些難題的解決進行了分析和設計,以期為后續的研究提供參考和借鑒。
1 繩網方案設計
空間繩網是一種針對空間非合作目標主動清除的新型手段,工作過程如圖1所示,其由空間機動平臺攜載,在與空間目標保持一定飛行距離的情況下,通過在軌發射、展開一張由柔性繩編織的大網,以空間覆蓋的方式進行抓捕,可提高空間目標抓捕的安全性和可靠性,抓捕目標后,將機動平臺與目標間通過系繩連接形成繩系組合體,可拖動目標離軌,實現主動清除。
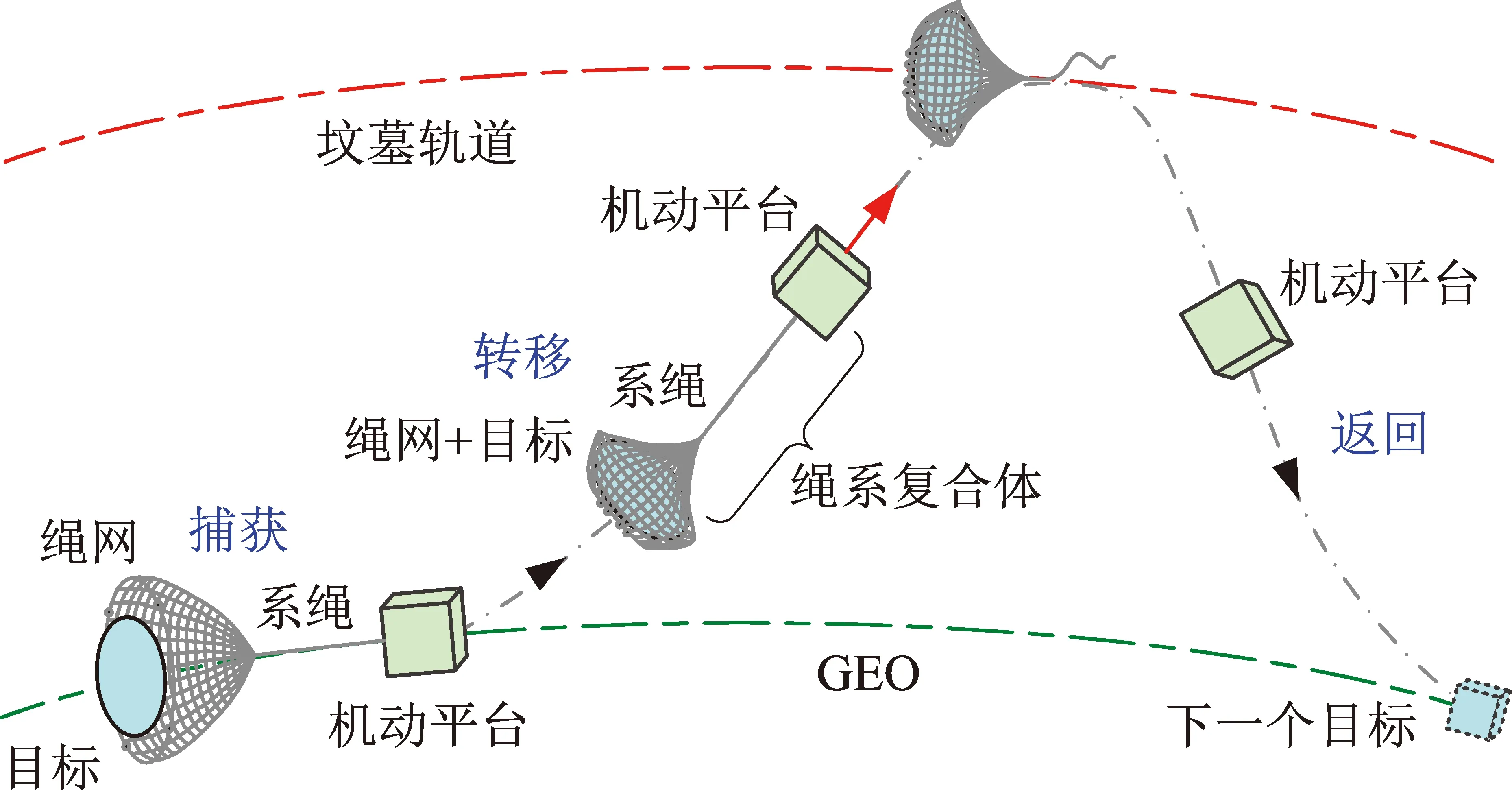
圖1 空間抓捕系統工作過程示意Fig.1 Diagram of space inflatable net capture system
繩網以收攏折疊方式經歷主動段過載,入軌后需要抓捕目標時,首先解鎖網包,然后通過發射裝置和牽引質量塊將繩網拉出展開,形成具有一定面積的柔性大網捕獲目標,根據空間抓捕系統工程樣機任務分析,提出本文的設計約束條件如下:
(1)可抓捕最大直徑20 m、最小直徑1 m的空間目標;
(2)在彈射張開包裹目標過程中極端情況受力最大為500 N;
(3)拖曳過程中的最大受力為1600 N;
(4)繩網要盡可能輕,在拉出展開過程中要防止纏繞鉤掛。
本文在繩網原理樣機研制的基礎上,采用仿真分析、設計加工及試驗驗證相結合的方式開展了研究,以期實現特大型繩網技術的突破。
1.1 繩網結構設計
1.1.1 繩網構型選擇
繩網的結構構型[9]設計包括網型選型設計和網目選型設計2個部分,繩網構型可以描述為由交叉節點及連接交叉節點之間的繩段組合而成。按照繩網的自然展開形狀可以劃分為二維平面繩網和三維繩網,從加工工藝的角度出發,二維平面繩網更易于加工。本文中繩網結構構型設計選取二維平面繩網。
中心對稱性要求是繩網內力均衡性和折疊封貯兩方面的共同要求,因此,網型應首先滿足正邊形構型,且應由多塊相同網體拼接而成,用N代表繩網邊數,則正三、四、六、八邊形繩網可以表示為N=3、N=4、N=6和N=8,如圖2所示。
對正三、四、六、八邊形繩網的力學性能要求和展開性能要求進行仿真,用t表示繩網拉出展開時間,仿真結果如圖3所示,經綜合比較分析不同正多邊形的拉出展開性能以及考慮抓捕系統的整體優化,最終選擇正六邊形網型作為工程樣機網型。

圖2 網型選擇示意Fig.2 Diagram of net type
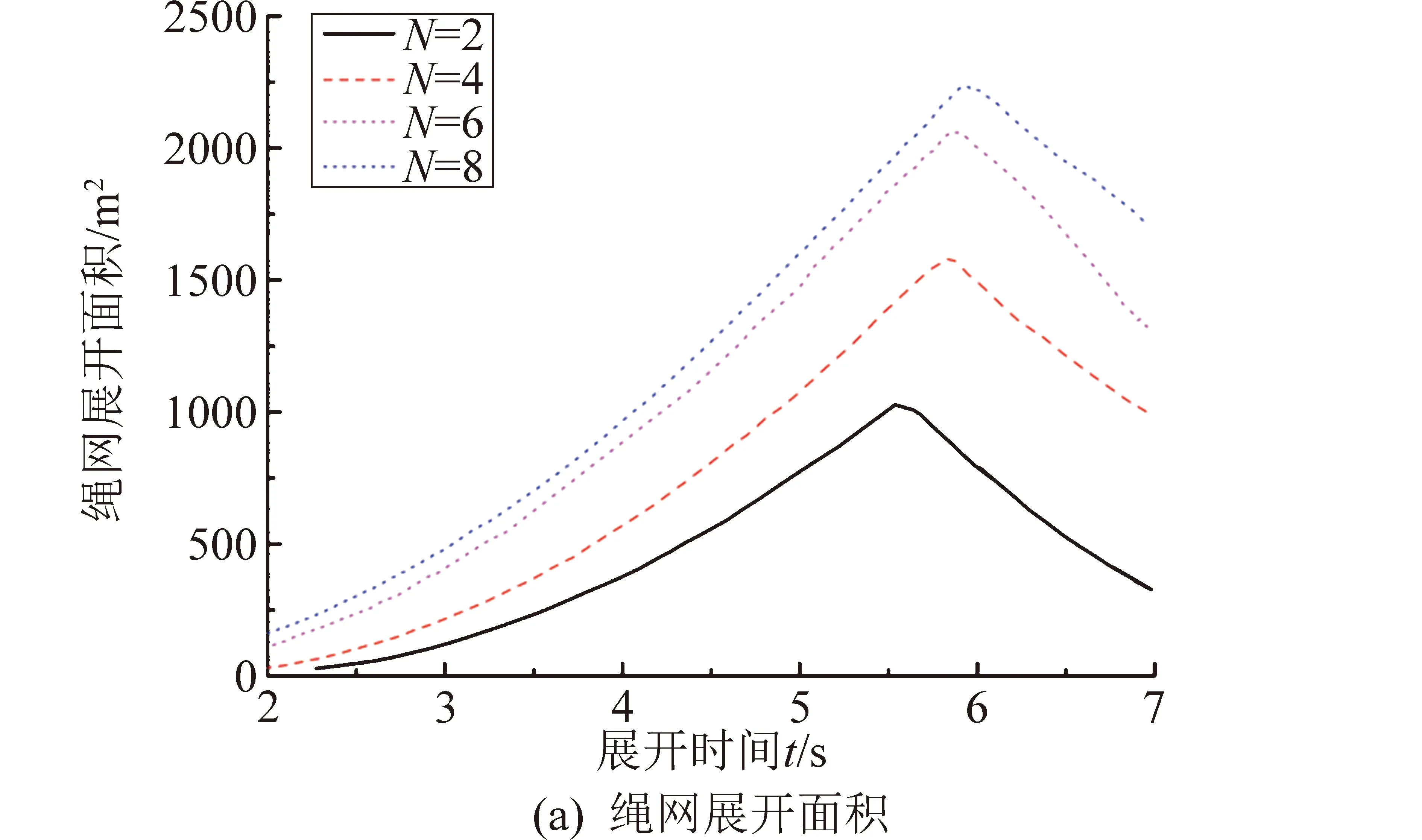
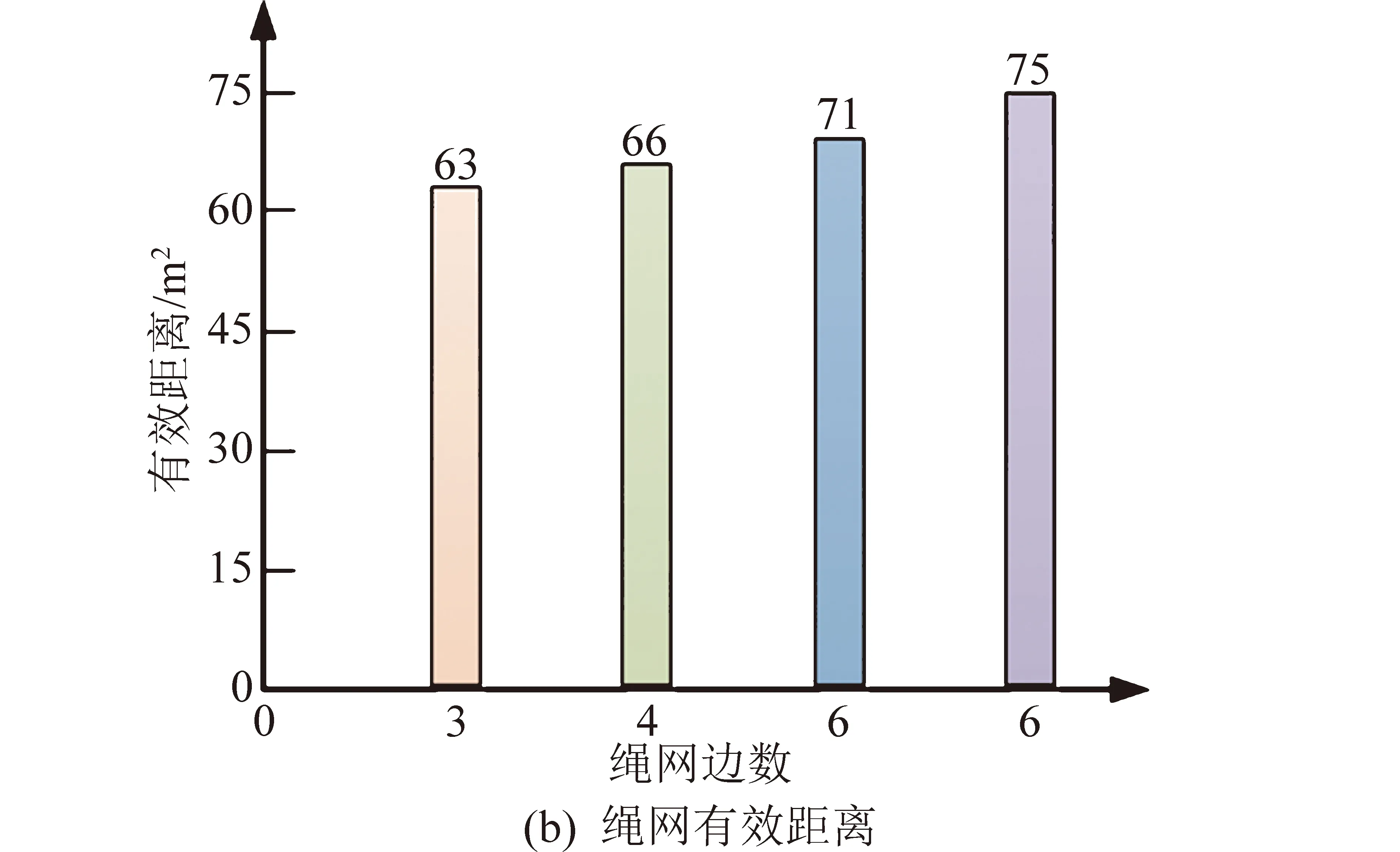
圖3 不同正多邊形拉出展開仿真對比Fig.3 Comparison of regular polygon net unfold simulation
常用的網目形狀包括3種形狀:①正三角形;②正四邊形;③正六邊形。用μ代表繩網網目邊數,則3種網目形狀可以表示為μ=3、μ=4和μ=6,如圖4所示。
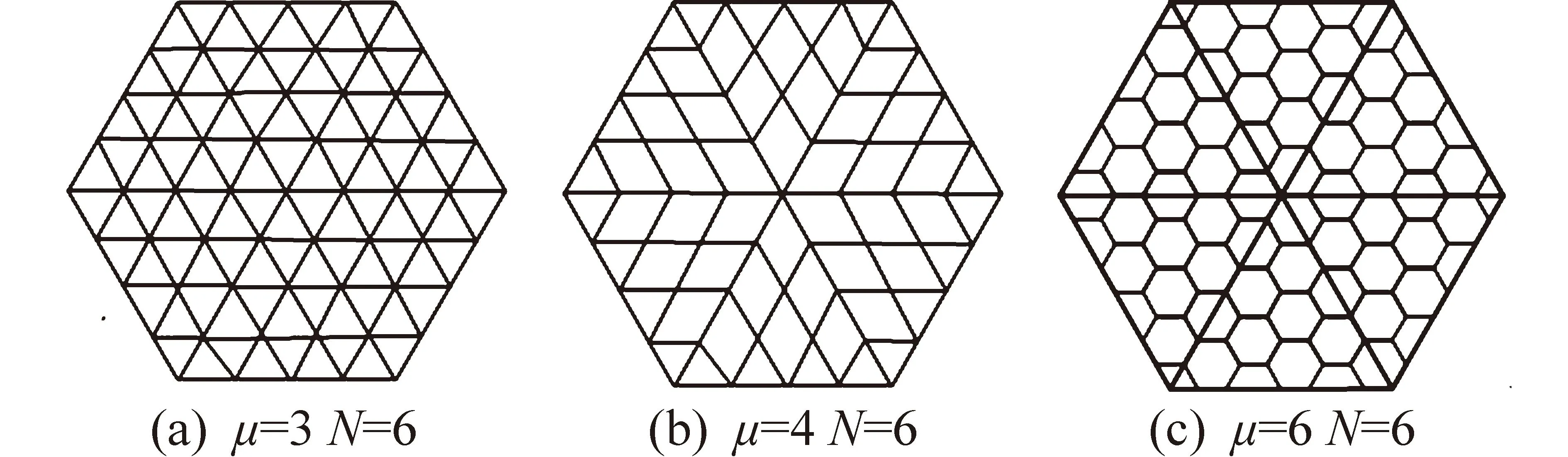
圖4 正六邊形繩網網目示意Fig.4 Diagram of regular hexagon net mesh
相比較于三角形網目,在不產生面內局部壓縮和褶皺的情況下,四邊形網目可以承受更大的剪切變形。這一點對后面繩網的折疊封裝尤其重要,且六邊形網目加工復雜且相對四邊形網目無明顯優勢,因此正六邊形網型網目選擇四邊形。
1.1.2 繩網材料選擇
在繩網工作過程包含有撞擊、大質量拖曳等環節,因此編制繩網的材料必須要有較大的強度;同時為節約發射成本,減輕質量,還要求該材料具有輕質高強的特點;為了便于繩網的加工和折疊封貯以及防止纏繞,要求繩網材料具有柔軟、可彎曲、表面光滑等特性。此外空間環境要求繩網材料具有耐高低溫、抗強輻射、抗剪切、強絕緣性等特性。紡織行業通常將具備以上一項或多項性能特點的纖維統稱為高性能纖維。目前世界范圍內已經工程化應用的高性能纖維材料主要包括:聚酰亞胺纖維(PI)、聚對苯基苯并二惡唑(PBO)、高強高模聚乙烯纖維(HSHMPE)、碳纖維、玄武巖纖維、Vectran纖維、間位芳綸纖維(國產名為芳綸1313)、對位芳綸纖維(國產名為芳綸1414)、雜環芳綸(芳綸Ⅲ)等,具體性能比較見表1。
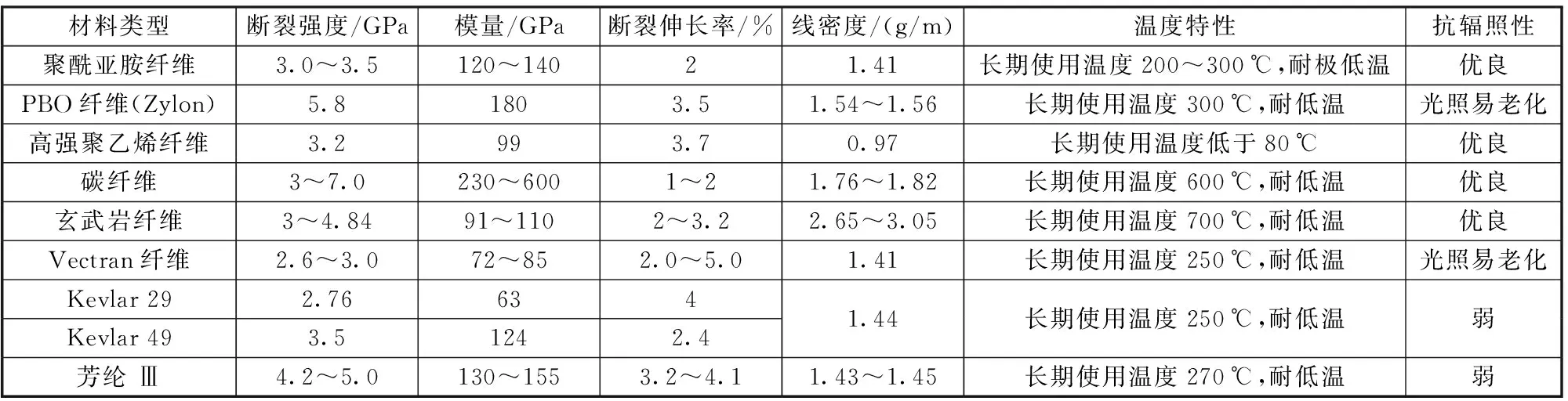
表1 高性能纖維性能比較Table 1 Comparison of high performance fibers
綜合來看,所有高性能纖維材料均不能同時在所有任務關心的性能方面具備優良品質,其中,聚酰亞胺耐原子氧能力弱,碳纖維、玄武巖纖維打結強度損失大,PBO、Vectran纖維、芳綸材料的耐輻照性能較弱,HSHMPE長期使用溫度低于80 ℃。若采取表面涂覆工藝或改性處理,但涂覆會導致與原狀態相比纖維會變得較為剛硬,不利于繩網編制及折疊包裝,且繩的直徑和質量會相應增加,不推薦使用。
綜上所述,經過調研分析和材料的多方案比較,綜合考慮環境適應性、力學特性等因素,在低軌使用時,建議選用芳綸Ⅲ纖維,在高軌無原子氧環境使用時,可選用聚酰亞胺纖維或芳綸Ⅲ纖維。
經調研及研制,1 mm芳Ⅲ繩的額定斷裂強度可為1250 N,線密度為0.8 g/m,2 mm芳Ⅲ繩的額定斷裂強度可為4000 N,線密度為1.8 g/m,1 mm高強耐輻照聚酰亞胺繩的額定斷裂強度可為1000 N,線密度為1.2 g/m,2 mm高強耐輻照聚酰亞胺的額定斷裂強度可為2500 N,線密度為2.2 g/m。
1.2 繩網設計方案
繩網由內圈繩、外圈繩、中部繩、徑向繩、系繩、收口繩和牽引繩等部分組成,如圖5所示,繩網邊長20 m,網目大小為0.3 m,面積近1200 m2。繩網鋪平后最外圈(外圈繩)為平面六邊型,中心為一個六邊形孔(內圈繩),用于匹配后續結構的安裝,外圈繩和內圈繩之間由六根徑向繩連接,網目呈菱形,由中心向外呈輻射式排列,外圈繩與中部繩的交點處,每間隔一個點,形成一個繩環,用于穿收口繩。外圈繩圍成的平面正六邊形頂點處,引出有牽引繩,用于牽引繩網拉出展開;系繩連接在內圈繩圍成的平面正六邊形上,用于對繩網捕獲的目標進行操作。
內、外圈繩、徑向繩、牽引繩和系繩為繩網主要承力結構,為抵抗繩網發射過程的沖擊、承受繩網碰撞目標物以及拖曳過程中的受力,材料選用2 mm芳Ⅲ繩;中部繩和收口繩材料為1 mm芳Ⅲ繩。在繩網編制時,為保證結頭無松脫、滑移以及減少打結后的強度損失,通過不同打結方式的比較,2 mm芳Ⅲ繩與1 mm芳Ⅲ繩編制時采用穿插死結法進行連接,2 mm芳Ⅲ繩間編制時采用交叉穿插法進行連接。繩網編制加工后,總重約6.3 kg,2個網目的斷裂強度實測為774 N,整體繩網的強度將遠遠大于774 N。

圖5 繩網結構示意Fig.5 Diagram of space net structure
1.3 繩網折疊包裝
繩網的折疊收納及可靠展開是影響空間抓捕系統抓捕成敗的關鍵,繩網折疊收納的可靠性、一致性影響著繩網的拉出展開,因此需要設計合適的網包對繩網進行折疊包裝。網包采用分區設計,分為繩網放置區、外圈繩放置區、系繩放置區,將繩網、系繩、外圈繩隔離開,同時繩網之間也有隔離,以減少纏繞、穿過和打結的發生,工作時避免繩網拉出過程中的質心偏移,實現繩網的對稱拉出,過程有序可控。在研制過程中,對繩網進行了多次折疊包裝和吊高出網試驗,對網包以及包網工藝進行了改進、優化和完善,確保了繩網的有序拉出展開。此外采用鏈式封包方式對繩網進行封包,既避免了繩網折疊包裝后繩網部分裸露在外的問題,也提高了繩網抗振動的能力,通過了力學振動試驗的考核。
2 仿真分析
本文在文獻[10]的基礎上,采用集中質量法建立繩網捕獲過程的動力學模型。空間繩網是具有較強非線性的多柔體系統,很難獲得其解析形式的動力學方程。本文采用有限元技術將繩網離散為若干繩索單元,采用鄰接表儲存繩索單元間的拓撲關系,記集合conn{i}為所有與節點i的相鄰的節點組成的集合,以Sij表示為連接節點i與節點j的繩段,lij為Sij的原長,Aij為Sij的截面積,ρ為材料密度,節點i的質量mi為
(1)
對于質量塊,還需在式(1)上加上其質量ms。在建模過程中,首先將繩索劃分單維質量集中在端點上的有限繩段單元n。繩段單元采用“彈簧”和“阻尼器”單元等效,即集中質量-半阻尼彈簧單元。單元如圖6所示,繩段單元n的剛度為kn;阻尼系數為cn;rn為節點n在節點坐標下的矢徑;rn-1為節點n-1在節點坐標下的矢徑。
繩網點i的動力學方程都可以在地心慣性坐標系下表示為
(2)
式中:Ti、Fiex、ri分別為節點i受到的等效張力矢量、等效外力矢量和矢徑;Tij為繩段Sij的張力矢量;Fijex為繩段Sij的外力矢量。
柔性體的碰撞與滑動過程屬于邊界條件非線性問題。在空間柔性捕獲任務中,繩索不可避免地會與目標發生碰撞接觸。基于Hertz接觸理論的碰撞力計算方法,進行了捕獲目標的動力學分析,如圖7所示(單位為m),繩網在拉出3.2 s時,展開的面積最大,為1040 m2,最大拉出距離為30 m,隨后繩網回彈使展開面積變小。
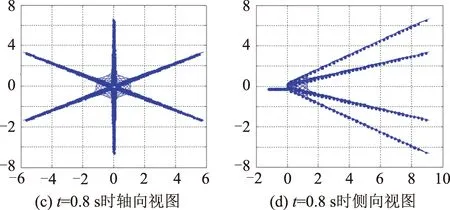


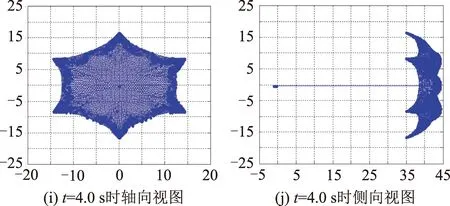
圖7 繩網拉出展開過程仿真示意Fig.7 Deployment simulation of space net
3 試驗驗證
繩網完成研制后,參加了全系統的地面抓捕驗證試驗,共進行了6次試驗,彈射器的彈射速度實測為14.8~15.2 m/s,繩網子系統在6次試驗中均順利解除封包、外圈繩、繩網本體依次從網包中有序拉出,將目標捕獲,繩網拉出過程中無纏繞、穿過、打結和鉤掛現象,如圖8所示,表明繩網折疊包裝工藝的可靠性和一致性可滿足工程應用要求,為后續工程應用奠定了基礎。

圖8 地面抓捕試驗中繩網捕獲目標過程示意Fig.8 Diagram of space net capture target in ground test
4 結束語
空間抓捕系統繩網作為柔性捕獲裝置在未來的空間碎片清除和在軌服務領域中具有極大的應用潛力。本文研究了繩網的構型,通過仿真分析及實物試驗對比,確定了較優構型繩網-正六邊形網型正四邊形網目;對比分析不同高性能纖維性能選取了合適的繩網材料,面積近1200 m2繩網僅重6.3 kg,滿足了繩網質量輕、強度高的要求;研究了特大型繩網的加工方式及工藝,通過試驗摸索解決了超細繩網狀結構編織、節點定位和滑移控制的問題;分析了繩網折疊包裝方法,通過分區隔離設計、有序管理繩網、鏈式封包解決了網系空間穿透控制及有展開、非等長控制繩牽拉及同步控制問題,確保了繩網的有序可控拉出展開。后續對于空間抓捕系統繩網要開展高精度動力學建模方法研究,應考慮繩網與網包、繩網間的摩擦力、空間環境對繩網應力-應變、阻尼特性的改變以及微重力等影響帶來的天地一體化差異等,進一步掌握繩網拉出展開、捕獲能力,以滿足真實太空環境下長期在軌使用的需求。
