基于小波網(wǎng)絡(luò)逆系統(tǒng)的汽油機(jī)瞬態(tài)空燃比預(yù)測控制研究*
2021-04-27 06:38:50楊濤宋丹丹
公路與汽運(yùn) 2021年2期
楊濤, 宋丹丹
(河南交通職業(yè)技術(shù)學(xué)院 汽車學(xué)院, 河南 鄭州 450005)
汽油機(jī)瞬態(tài)空燃比的控制精度是當(dāng)前發(fā)動機(jī)控制系統(tǒng)中的難題。瞬態(tài)工況下,進(jìn)氣量測量偏差、油膜動態(tài)傳輸特性及氧反饋信號滯后性等導(dǎo)致空燃比控制系統(tǒng)的非線性、時滯性和時變性,傳統(tǒng)基于氧傳感器的閉環(huán)控制很難實(shí)現(xiàn)瞬態(tài)空燃比精確控制。目前,瞬態(tài)空燃比控制研究主要集中在前饋或反饋控制,如利用狀態(tài)觀測器作為前饋控制對缸內(nèi)進(jìn)氣量進(jìn)行估計(jì),進(jìn)而實(shí)現(xiàn)空燃比精確控制;文獻(xiàn)[5]提出基于神經(jīng)網(wǎng)絡(luò)的前饋補(bǔ)償器,實(shí)現(xiàn)對空燃比系統(tǒng)噴油量的補(bǔ)償。在空燃比反饋控制方面,主要控制方法有PID、模糊控制和預(yù)測控制等,如文獻(xiàn)[6]設(shè)計(jì)了基于廣義預(yù)測控制的空燃比控制策略;文獻(xiàn)[7]提出帶動態(tài)時滯補(bǔ)償器的模糊PID控制策略,以更好地補(bǔ)償空燃比系統(tǒng)的時滯和適應(yīng)系統(tǒng)的非線性。基于前饋加反饋的復(fù)合控制策略為瞬態(tài)空燃比控制提供了新方向,如文獻(xiàn)[9]提出利用自適應(yīng)混合算法構(gòu)建發(fā)動機(jī)空燃比控制器,文獻(xiàn)[10]建立了瞬態(tài)空燃比的混沌時序LS-SVM預(yù)測模型等。為實(shí)現(xiàn)瞬態(tài)空燃比的有效控制,該文提出基于逆模型前饋控制附加動態(tài)矩陣反饋控制的復(fù)合控制策略。
1 總體思路
采用逆模型前饋控制附加動態(tài)矩陣反饋控制實(shí)現(xiàn)空燃比系統(tǒng)的預(yù)測控制,空燃比控制系統(tǒng)框圖見圖1。利用小波網(wǎng)絡(luò)建立系統(tǒng)逆模型,將其作為前饋控制器對瞬態(tài)空燃比系統(tǒng)中進(jìn)氣量進(jìn)行動態(tài)補(bǔ)償,再將該逆系統(tǒng)與原系統(tǒng)串聯(lián),形成偽線性系統(tǒng),結(jié)合動態(tài)矩陣控制的預(yù)測模型、優(yōu)化計(jì)算和反饋校正對系統(tǒng)的擾動、誤差等進(jìn)行修正,實(shí)現(xiàn)對非線性、時滯、時變的瞬態(tài)空燃比系統(tǒng)的預(yù)測控制。
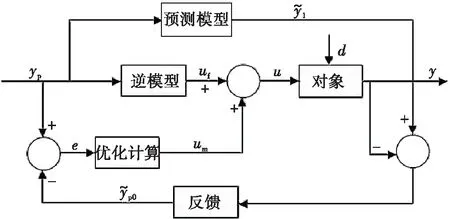
yp為對象期望輸出;u、y分別為對象輸入、輸出;uf為逆系統(tǒng)辨識輸出;um為反饋控制優(yōu)化后輸出;d為控制對象的擾動輸入;為預(yù)測模型輸出;為反饋校正輸出
2 基于小波網(wǎng)絡(luò)的逆系統(tǒng)辨識
2.1 瞬態(tài)空燃比模型
實(shí)際空燃比模型為:
(1)
式中:λ為實(shí)際空燃比;ma為每循環(huán)進(jìn)入氣缸的空氣質(zhì)量;mf為燃油質(zhì)量。

(2)
式中:α為節(jié)氣門開度;pm為進(jìn)氣管壓力。
(3)
式中:ω為發(fā)動機(jī)轉(zhuǎn)速。
瞬態(tài)工況下,進(jìn)、出氣管的空氣流速不再相等,則進(jìn)氣管內(nèi)空氣質(zhì)量流量為:
式中:Vm為進(jìn)氣管容積;R為氣體常數(shù);Tm為進(jìn)氣管內(nèi)溫度。

(4)
油膜模型為:
(5)
(6)
(7)

(8)
式中:ti為噴油器噴油脈寬時間(ms)。
綜上,空燃比數(shù)學(xué)模型可表示為:
λ=f(ω,α,ti,pm)
(9)
從上述建模過程可見,發(fā)動機(jī)瞬態(tài)空燃比是一復(fù)雜的非線性耦合系統(tǒng)。
2.2 系統(tǒng)逆模型
逆系統(tǒng)控制方法是一種利用直接反饋線性化的解耦控制方法,根據(jù)逆系統(tǒng)方法構(gòu)造的偽線性系統(tǒng)將非線性過程的輸入、輸出關(guān)系近似線性化。
在瞬態(tài)空燃比模型中,以噴油脈寬ti作為系統(tǒng)的輸入,節(jié)氣門開度、進(jìn)氣管壓力、發(fā)動機(jī)轉(zhuǎn)速作為系統(tǒng)干擾d,即d=[α,pm,ω]T,空燃比λ為系統(tǒng)輸出,瞬態(tài)空燃比系統(tǒng)可寫為:
f[y(k+α),…,y(k+α-m)n,u(k),…,
u(k-m)]=0
(10)
式中:f(·)為非線性函數(shù);α為輸出延遲,α≥1;m為輸入階次;n為輸出階次。
由于噴油脈寬是嚴(yán)格單調(diào)的,瞬態(tài)空燃比系統(tǒng)的逆模型可寫為:
u(k)=g[y(k+α),…,y(k+α-n),u(k-1),
…,u(k-m)]
(11)
2.3 小波網(wǎng)絡(luò)逆系統(tǒng)的辨識
以小波網(wǎng)絡(luò)辨識系統(tǒng)逆模型,即用小波網(wǎng)絡(luò)代替式(11)中的g(·),根據(jù)系統(tǒng)的輸出調(diào)整網(wǎng)絡(luò)權(quán)值,使小波網(wǎng)絡(luò)的響應(yīng)與g(·)相同。
利用下式進(jìn)行逆模型動態(tài)辨識:
(12)
式中:ωj為網(wǎng)絡(luò)的權(quán)值;Dj為伸縮矩陣;aj為平移向量。
基函數(shù)采用高斯母小波,其表達(dá)式為:
Ψ(t)=(1-t)e-t2/2
(13)
以式(12)代替神經(jīng)網(wǎng)絡(luò)的Sigmoid傳遞函數(shù),用于逆模型動態(tài)辨識。圖2為逆系統(tǒng)辨識結(jié)構(gòu)圖。
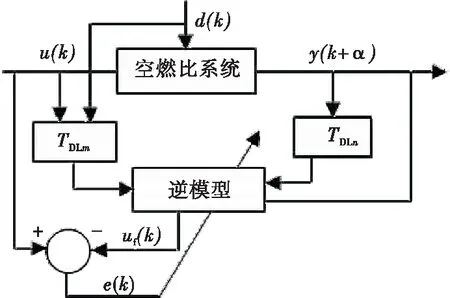
u(k)、y(k+α)分別為系統(tǒng)的輸入、輸出;TDLm、TDLn分別為輸入、輸出延時量,TDLm=[u(k-1),…,u(k-m)],TDLn=[y(k+α-1),…,y(k+α-n)];uf(k)為逆系統(tǒng)辨識輸出;e(k)為辨識輸出uf(k)與系統(tǒng)輸入u(k)之間的差值,用于訓(xùn)練小波網(wǎng)絡(luò)
令φ(k)=y(k+α),則有:
u(k)=g[φ(k),…,φ(k-m),u(k-1),…,
u(k-n)]
(14)
f(g(φ(k)))=f(g(y(k+α)))=y(k)
(15)
即:
(16)
將小波網(wǎng)絡(luò)逆系統(tǒng)串聯(lián)在原系統(tǒng)前構(gòu)成偽線性系統(tǒng)(見圖3),該偽線性系統(tǒng)可實(shí)現(xiàn)輸入、輸出間的線性化。但偽線性系統(tǒng)的開環(huán)控制僅消除了非線性特征,不能很好地控制外界擾動、誤差等。因此,附加動態(tài)矩陣控制這一反饋環(huán)節(jié)來消除系統(tǒng)干擾。
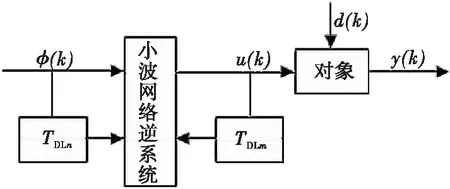
圖3 偽線性系統(tǒng)示意圖
3 瞬態(tài)空燃比的預(yù)測控制
采用動態(tài)矩陣控制實(shí)現(xiàn)預(yù)測控制。設(shè)控制對象的階躍響應(yīng)采樣值為{a(1),a(2),…,a(N),…,a(∞)},N為建模時域,動態(tài)矩陣控制時域長度為M,優(yōu)化時域長度為P,且M≤P≤N,則對象的預(yù)測模型可表示為:
YPM(k)=YP0(k)+AΔUM(k)
(17)
ΔUM(k)=[Δu(k),Δu(k+1),…,Δu(k+M-1)]
優(yōu)化性能指標(biāo)為:
minJ(k)=
(18)
式中:YP(k)=[yp(k+1),…,yp(k+P)]T,為P時刻的期望輸出;Q為誤差權(quán)矩陣[見式(19)];R為控制權(quán)矩陣[見式(20)]。
(19)
(20)
最優(yōu)控制率為:
ΔUM(k)=(ATQA+R)-1ATQ[YP(k)-YP0(k)]
(21)
一步控制輸出為:
Δu(k)=CTΔUM(k)=dT[YP(k)-YP0(k)]
(22)

N時刻對象的預(yù)測值為:
YN1(k)=YN0(k)+aΔu(k)
(23)
式中:YN0為N時刻初始預(yù)測值;a=[a(1),…,a(N)]T。
預(yù)測模型的輸出誤差為:
(24)

對輸出誤差加權(quán)來修正對未來輸出的預(yù)測:
YCOR(k+1)=YN1(k)+He(k+1)
(25)
式中:H=[h1,…,hN]T。
得到:
YN0(k+1)=SYCOR(k+1)
(26)
P時刻的初始預(yù)測值為:
(27)
4 仿真與分析
4.1 仿真方案設(shè)計(jì)
(1) 收集試驗(yàn)數(shù)據(jù)樣本來訓(xùn)練小波網(wǎng)絡(luò)。試驗(yàn)發(fā)動機(jī)選取HL495Q電噴汽油機(jī),其技術(shù)參數(shù)見表1。考慮到發(fā)動機(jī)在瞬態(tài)工況的復(fù)雜性,同時保證收集的樣本數(shù)據(jù)不失真,試驗(yàn)分階段進(jìn)行,分為加速過程和減速過程,分別獲取節(jié)氣門開度、發(fā)動機(jī)轉(zhuǎn)速、冷卻液溫度、進(jìn)氣管壓力和噴油脈沖寬度等瞬態(tài)樣本數(shù)據(jù),采樣時間為0.01 s。加速過程收集節(jié)氣門由怠速升至85%位置時的數(shù)據(jù),共計(jì)5×800組;減速過程收集節(jié)氣門由85%閉合至怠速位置時的數(shù)據(jù),共計(jì)5×500組。共獲得5 200組數(shù)據(jù)作為訓(xùn)練樣本,訓(xùn)練穩(wěn)定后,采用加速過程800組、減速過程500組數(shù)據(jù)進(jìn)行檢驗(yàn)測試。獲取的樣本數(shù)據(jù)范圍見表2,并在訓(xùn)練前對所有數(shù)據(jù)進(jìn)行歸一化處理。
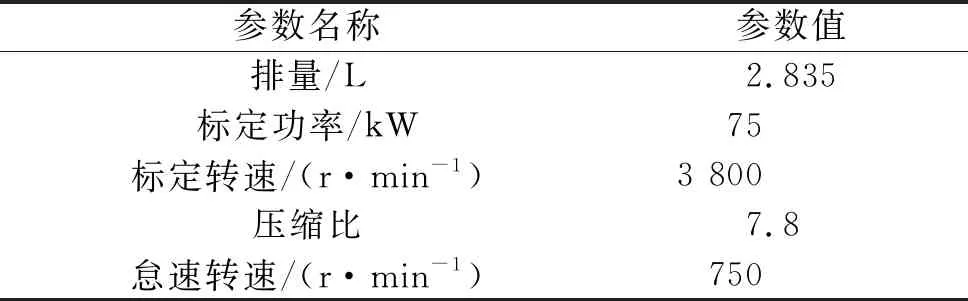
表1 試驗(yàn)發(fā)動機(jī)的技術(shù)參數(shù)
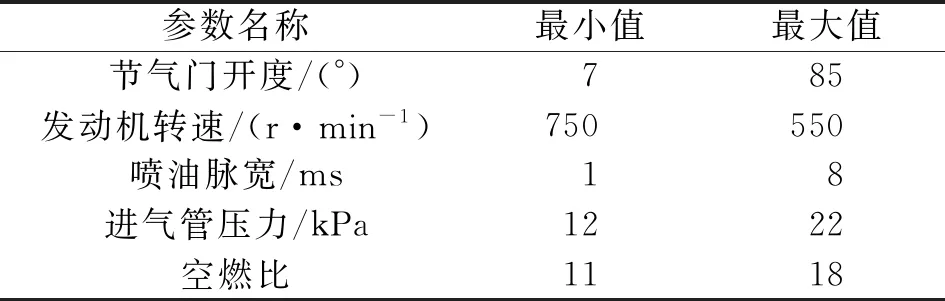
表2 發(fā)動機(jī)樣本數(shù)據(jù)范圍
(2) 利用小波網(wǎng)絡(luò)對逆模型進(jìn)行辨識。空燃比控制系統(tǒng)期望輸出λ=14.7,輸入、輸出階次分別為m=2、n=3,系統(tǒng)延遲α=2。小波基函數(shù)采用高斯母小波,網(wǎng)絡(luò)結(jié)構(gòu)為5-11-2的3層網(wǎng)絡(luò)。小波網(wǎng)絡(luò)參數(shù)優(yōu)化采用最速下降法,小波網(wǎng)絡(luò)的學(xué)習(xí)和動量因子分別取0.05、0.9。為驗(yàn)證小波網(wǎng)絡(luò)辨識逆模型的有效性,測試模型瞬態(tài)空燃比輸出并與臺架試驗(yàn)實(shí)測值進(jìn)行對比(見圖4)。結(jié)果顯示,逆模型輸出能很好地逼近實(shí)際空燃比輸出,且反應(yīng)速度快。
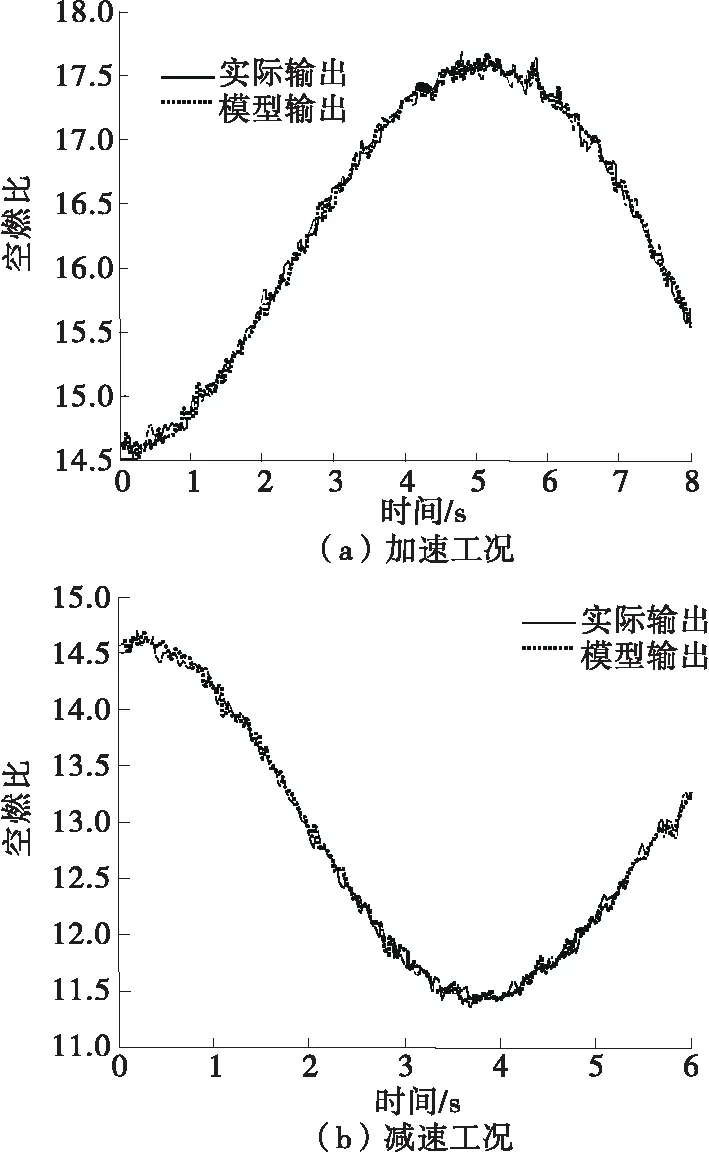
圖4 基于逆模型的空燃比輸出與實(shí)際輸出對比
(3) 偽線性系統(tǒng)的驗(yàn)證。將逆模型與空燃比系統(tǒng)結(jié)合,對其輸入方波信號,輸入與輸出響應(yīng)見圖5。從中可見,構(gòu)造的偽線性系統(tǒng)能實(shí)現(xiàn)線性化功能,且輸入、輸出間的時延為2階。
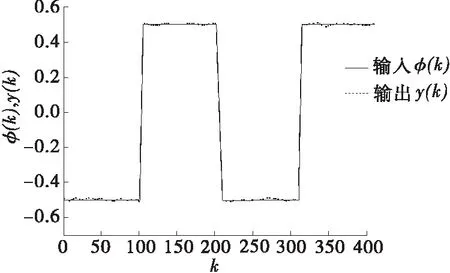
圖5 偽線性系統(tǒng)的輸入φ(k)與輸出y(k)響應(yīng)
(4) 設(shè)計(jì)動態(tài)矩陣控制器。動態(tài)矩陣控制器中的建模時域、預(yù)測時域和控制時域分別為N=40、P=15、M=6,誤差權(quán)矩陣和控制權(quán)矩陣分別為Q=0.023Ι(P)、R=0.62Ι(M)。
4.2 仿真結(jié)果分析
分別模擬兩種瞬態(tài)工況對控制策略進(jìn)行仿真研究,兩種工況下節(jié)氣門變化過程見圖6,仿真控制結(jié)果見圖7。
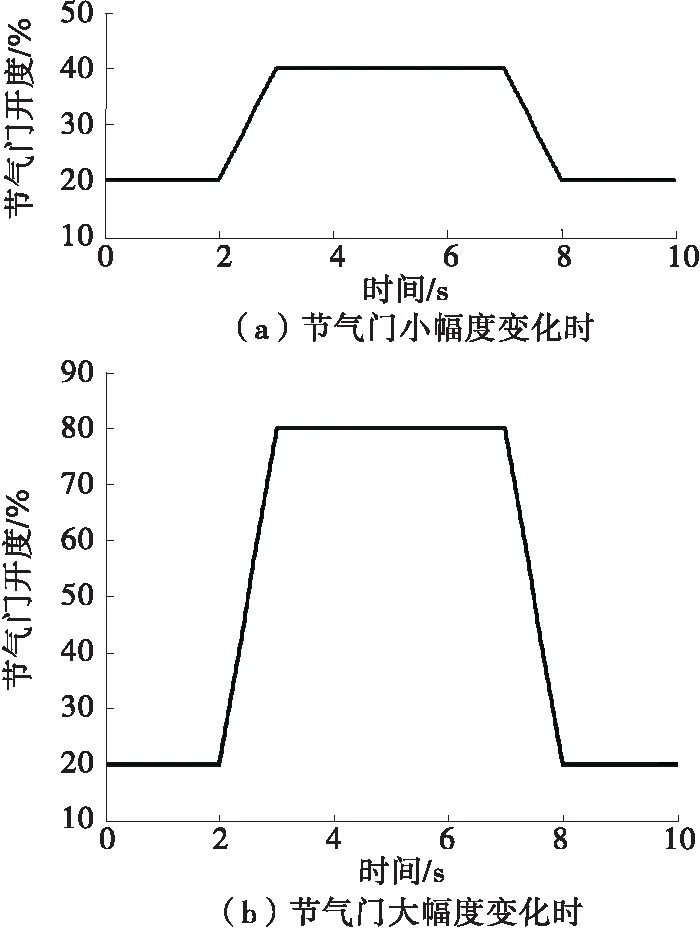
圖6 節(jié)氣門變化曲線
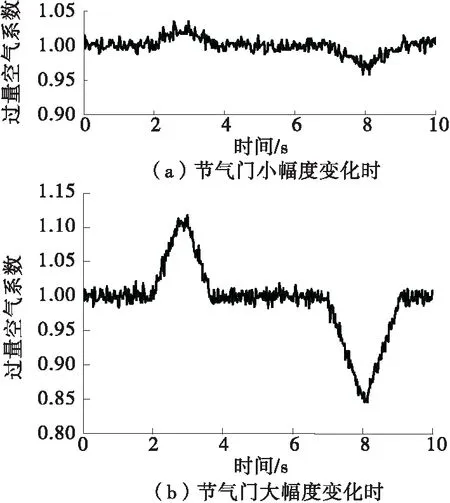
圖7 過量空氣系數(shù)輸出
從圖6、圖7可以看出:當(dāng)節(jié)氣門開度變化幅度不大時,系統(tǒng)輸出的過量空氣系數(shù)波動較小,基本維持在期望值1附近,最大失調(diào)量約1.01,且響應(yīng)速度非常快;節(jié)氣門開度變化幅度較大時,過量空氣系數(shù)波動較大,但響應(yīng)速度很快,變化范圍在期望值±2.5%內(nèi)。說明所設(shè)計(jì)的控制系統(tǒng)具有預(yù)測功能,可改善瞬態(tài)工況因非線性、系統(tǒng)延時等造成的空燃比大幅變化情況,避免發(fā)動機(jī)過濃或過稀。
5 結(jié)語
為解決瞬態(tài)空燃比系統(tǒng)的非線性、時滯等問題,提出一種基于逆模型前饋控制附加動態(tài)矩陣反饋控制的復(fù)合控制策略,實(shí)現(xiàn)空燃比系統(tǒng)的預(yù)測控制。仿真結(jié)果表明,小波網(wǎng)絡(luò)辨識的逆模系統(tǒng)具有良好的逼近能力,所構(gòu)造的偽線性系統(tǒng)能實(shí)現(xiàn)線性化功能;前饋附加反饋的復(fù)合控制方法能兼顧前饋與反饋的優(yōu)勢,既能高精度逼近空燃比瞬態(tài)過程,又可提高系統(tǒng)的魯棒性和抗干擾能力。基于復(fù)合控制策略的預(yù)測控制方法可有效控制空燃比系統(tǒng)。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45