再入飛行器禁飛區規避近似解析制導方法
2021-04-26 06:54:52趙亮博朱廣生宋加洪盧寶剛
導彈與航天運載技術 2021年2期
趙亮博,朱廣生,莊 凌,宋加洪,盧寶剛
(1.北京航天長征飛行器研究所,北京,100076;2.中國運載火箭技術研究院,北京,100076)
0 引 言
再入飛行器的機動制導問題,一直是再入飛行器制導控制領域的研究熱點[1~3]。飛行器再入制導過程具有非線性、時變性和不確定性等特點,其飛行路徑除了需要滿足過載、動壓、熱流率約束外,還需要滿足由自然、軍事等因素造成的禁飛區約束。
禁飛區約束是一種復雜的路徑約束,現有禁飛區規避方法主要集中在離線最優軌跡解算中,如經典的數值求解方法偽譜法[4],通過不同配點和多項式插值方式實現全局軌跡的優化求解。但是離線求解方法解算效率低,無法滿足實時制導需求。隨著探測技術發展,對禁飛區域的實時或近似實時探測成為可能,因此需要研究實現禁飛區在線規避的制導算法。文獻[5]提出了一種考慮禁飛區的預測校正制導方法,利用航向角誤差走廊的形式控制飛行器的側向運動,當禁飛區等約束急劇變化時預測校正的制導方法易產生性能退化。文獻[6]利用一種基于三觸角預測方法的側滑角瞬變策略,實現了禁飛區的規避,但機動軌跡的生成依賴于飛行器動力學方程積分而來的3個“觸角”,計算代價大。
基于Dubins曲線的路徑規劃方法在機器人、無人機的軌跡規劃中得到了廣泛應用[7~9]。文獻[10]第1次提出Dubins路徑的概念,在轉彎半徑對車輛運動影響的分析上,設計了滿足約束條件的最短路徑并進行了理論證明,即滿足曲率限制的最短曲線由圓弧與直線構成。文獻[11]設計了基于 Dubins曲線的高超聲速飛行器離線路徑規劃方法,但未結合具體的飛行器轉彎能力和終端約束進行分析。
本文在對再入飛行器轉彎能力分析的基礎上,得出飛行器轉彎半徑和傾側角的近似解析關系,結合Dubins曲線的路徑規劃方法生成禁飛區規避的制導策略。同時為修正規避引起的終端誤差,建立基于能量運動模型來解析預測航程,通過割線法對傾側角指令進行迭代修正,實現航程校正控制。通過速度傾角的反饋控制設計,滿足終端高度約束。最后基于CAV-H的數學模型仿真驗證了該算法在禁飛區繞飛規避的有效性,滿足終端約束條件且計算效率高、實時性好。
1 飛行器運動建模
1.1 再入運動方程
本文研究的飛行器采用無動力滑翔的方式再入,采取傾斜轉彎(Bank To Turn,BTT)的機動策略。為研究飛行器在大氣層內的運動規律、分析飛行器轉彎能力、設計制導策略,在不考慮地球自轉影響的情況下,建立飛行器再入運動方程組為
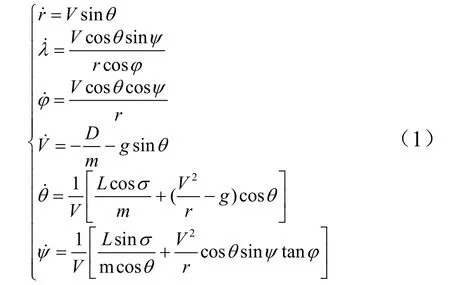
式中r,λ,φ,V,θ,ψ分別為地心距、經度、緯度、速度、速度傾角和航向角;σ為傾側角;g為重力加速度;L,D分別為氣動升力和阻力,且:
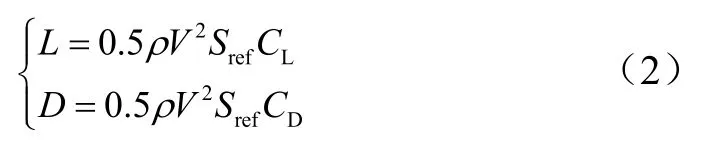
式中ρ為大氣密度;Sref為參考面積;CL,CD分別為升力系數和阻力系數。
由于飛行結束時間不確定,給航程解析預測帶來了困難。為此,定義如下形式的無量綱變量e能量:

式中為無量綱的地心距,無量綱化參數為地球半徑R0;為無量綱速度,無量綱化參數為,g0為海平面重力加速度。為解析預測航程需要,建立如下歸一化的基于能量的運動方程:
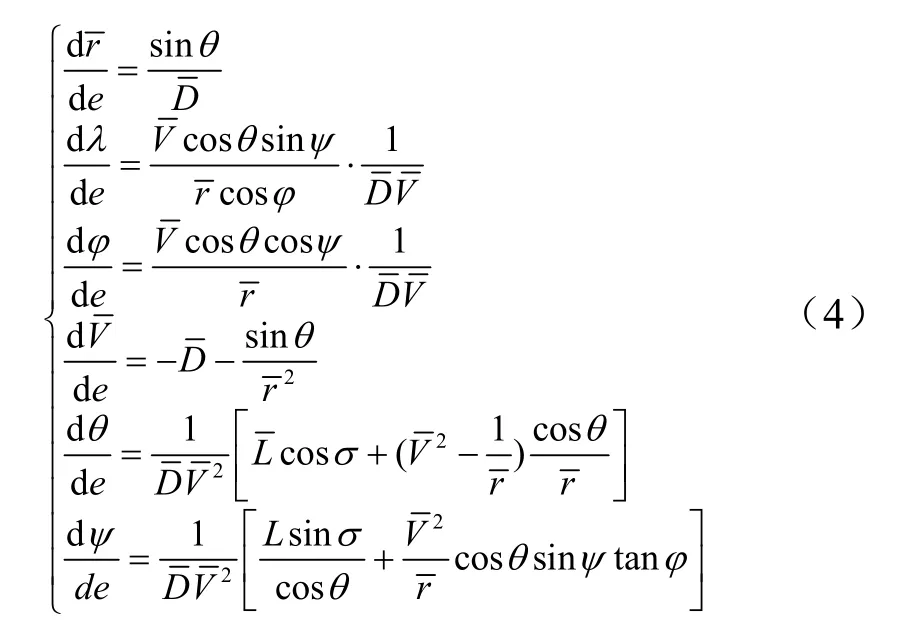
式中為無量綱阻力加速度,無量綱系數為g0。
1.2 再入約束建模
本文考慮的終端約束有高度約束、速度約束及終端位置約束,以能量為自變量時表達式如下:

式中ef,rf,Vf,λf,φf分別為以能量為自變量描述的終端能量、地心距、速度、經度和緯度。
由于地理、軍事等因素會造成飛行器不能在某些區域飛行,即禁飛區,通常用無限高圓柱表示。用經緯度及禁飛區半徑rN描述禁飛區如下:
式中λz,φz分別為禁飛區中心的經度和緯度。
函數s((λz,φz), (λ,φ) )表示兩點間的大地線長度:

2 制導策略
本文將制導策略分為禁飛區規避制導和完成規避后的校正策略兩部分設計,具體算法流程如圖1所示。
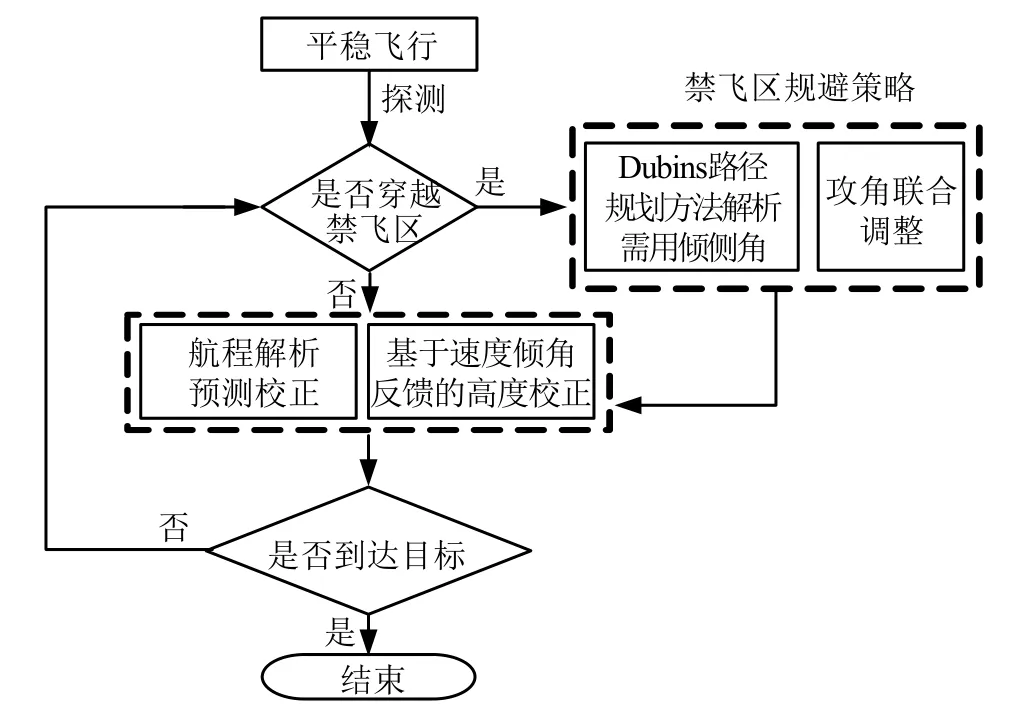
圖1 制導算法流程 Fig.1 Guidance Algorithm Flow
2.1 轉彎能力分析
為設計禁飛區規避策略,需要對飛行器的轉彎能力進行分析。對于采用BTT機動方式的飛行器,通過傾斜升力面的方式使升力產生側向分量,提供轉彎的需用向心力。
假設轉彎過程為無側滑的平衡飛行狀態,即轉彎過程中速度傾角近似為零:

轉彎過程中的需用向心力由升力的分量Lsinσ提供,定義轉彎半徑為rz,可得:

聯立式(8)、式(9)可得:
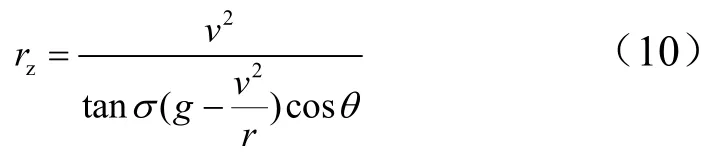
在水平轉動平面內忽略離心力項,可得機動轉彎半徑的近似解析解:

因此,一定轉彎半徑rz下傾側角σ的近似解析解:

為驗證該公式,針對CAV-H飛行器在高度50 km、速度 5000 m/s和高度 55 km、速度 5500 m/s兩組不同的工況進行仿真驗證。

圖2 工況一:高度 50 km,速度 5000 m/s Fig.2 Condition 1: height 50 km, velocity 5000 m/s
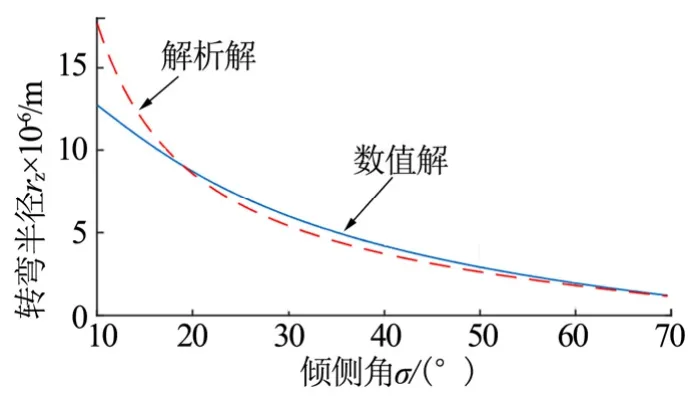
圖3 工況二:高度 55 km,速度 5500 m/s Fig.3 Condition 2: height 55 km, velocity 5500 m/s
該公式建立在平衡滑翔飛行的基礎上,可以用作該狀態下傾側角和轉彎半徑的解析計算。從圖2、圖3中可以看出,當傾側角大于25°時解析解和數值解誤差較小,式(12)可為機動策略的選取提供依據。
此外,在實際轉彎過程中由于升力在鉛垂方向上的分量減小,如果不對攻角加以調節會引起飛行高度的下降。為方便設計參考,本文給出了無攻角聯合調節時機動轉彎引起的高度損失近似估算公式。
假設轉彎前后飛行器的高度分別為h1,h2,大氣密度分別為ρ1,ρ2,根據大氣密度的近似估算公式可得:
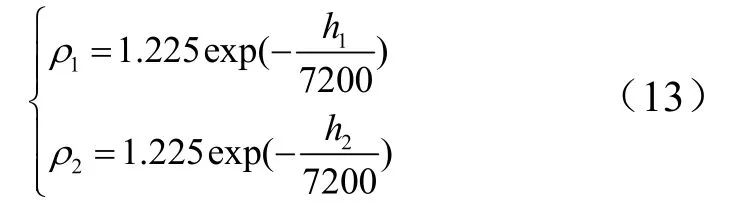
轉彎后為維持平衡飛行,推導出大氣密度變化規律:

因此,高度變化量Δh和傾側角間的近似解析關系為

該關系式可用做轉彎引起高度損失的近似估算,對機動策略的選取具有參考意義。
2.2 基于Dubins曲線的禁飛區規避策略
飛行器由起始狀態調整至目標狀態所經過的路徑是經計算選擇的一個起始轉向圓rz1與一個目標轉向圓rz2之間通過合適的公切線相連得到的有向曲線,此有向曲線即是一條Dubins路徑[10],如圖4所示。
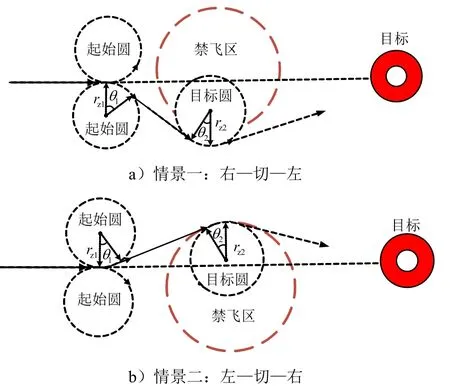
圖4 Dubins路徑 Fig.4 Dubins Path
依據 Dubins曲線的組成原理確定本文的繞飛策略,其中需要求解的變量包括 2次轉彎的轉彎半徑rz1,rz2及轉彎角度θ1,θ2。同時,針對轉彎過程中可能出現的高度損失,采用攻角和傾側角聯合調整的方法設計攻角大小。具體的規避流程如圖5所示。
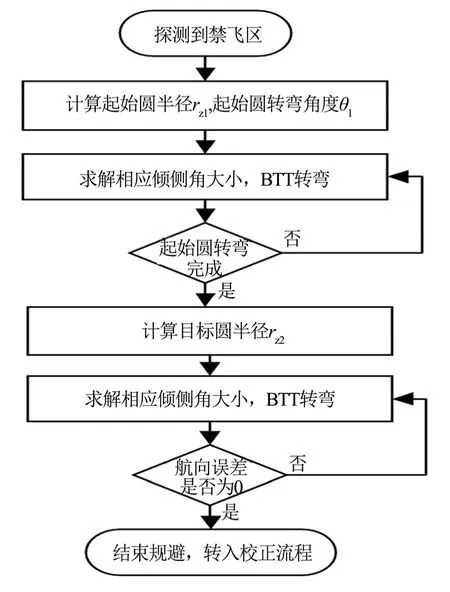
圖5 基于Dubins曲線的規避流程 Fig.5 Avoiding Process Based on Dubins Curve
假設對禁飛區的探測距離為rdet,即在距離rdet時發現禁飛區。對于半徑為rz大小的禁飛區,Dubins曲線起始圓的最小轉彎半徑rz1計算公式為

由式(16)可得,飛行器探測到禁飛區的時機越早、探測距離越遠,需用機動轉彎半徑越大。聯合式(12)與式(16)即可求出規避禁飛區的需用傾側角σrz1。同時,根據相切點位置通過解析幾何的方式可求出轉彎角度1θ的大小。
通過目標圓的半徑rz2選取對應傾側角σrz2大小時需進行判斷,假設當前飛行狀態下轉彎半徑rz對應的傾側角為σrz,通過式(23)得出的傾側角大小為σcmd,則:

然后,通過判斷航向角誤差是否為0,即飛行器是否瞄準目標點,作為轉彎結束的標志并進入校正環節,不再計算目標圓旋轉角度2θ。
由式(15)可得,轉彎時如果不對總升力進行調節,會引起飛行器的高度損失。本文通過聯合調整攻角的方式來調整升力,補償高度損失,近似平衡滑翔飛行時存在如下關系式:

可求得該飛行條件下的需用升力,通過氣動反插值的方式求出需用攻角。

需要指出的是,當傾側過大時為了補償高度損失所需用的攻角較大,大攻角飛行時升阻比低會產生較大的速度損失。因此需設定合理的攻角聯合調節范圍[αlow,αmax],針對CAV-H飛行器,本文選取的攻角調節區間為[8°,15°]。
2.3 航程解析預測校正控制
完成禁飛區規避后,飛行器高度和速度會產生相應的損失。為滿足終端約束,需對航程及高度進行校正。本文通過傾側角大小的調節,實現航程的校正。根據文獻[12]的推導,基于能量的運動模型進行航程預測:

式中(ef)為從能量e到能量ef的歸一化預測航程,歸一化變量為地球半徑R0。此時,預測航程和待飛航程的差值:

式中s為當前真實的待飛航程,可通過式(7)并結合當前點和終點的經緯度坐標求出。
通過調節傾側角大小的方式實現對航程的在線校正,采用割線法不斷迭代傾側角大小:


2.4 終端高度控制
在再入飛行的大部分時間內,飛行攻角處于最大升阻比大小附近,通常采用攻角剖面的形式設計攻角大小,同時實現滿足過程約束:
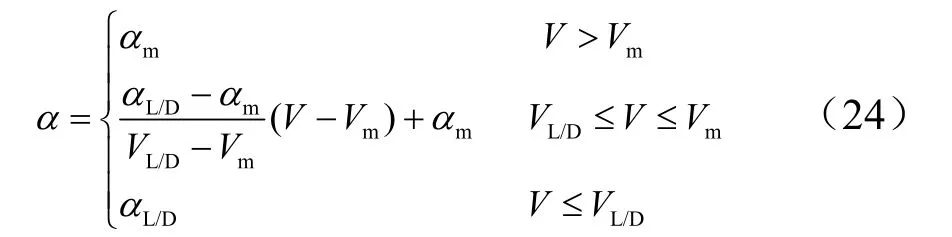
式中αm為較大攻角,使飛行器在初始階段快速達到平衡滑翔的飛行狀態;αL/D為最大升阻比攻角;VL/D和Vm為設計變量,實現對不同飛行階段攻角大小的控制。
在飛行末段,為實現滿足終端高度約束,不采用攻角剖面的形式。本文通過設計一種速度傾角反饋控制的策略調整攻角大小,期望速度傾角dθ設計為

設計線性反饋跟蹤控制律:

聯合式(1)可求得需用升力Lc:

同樣,通過氣動反插值的方式求出需用攻角:

對于航向的控制采用傳統航向角誤差走廊的形式實現,在此不做贅述。
3 仿真結果及分析
本文采用CAV-H飛行器的數學模型,進行仿真驗證[14],仿真初始及終端條件見表1。
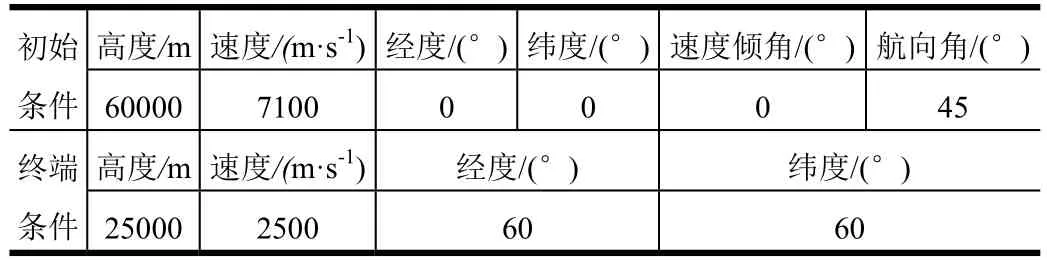
表1 初始條件及終端條件 Tab.1 Initial Conditions and Terminal Conditions
假設飛行器探測距離為2000 km,探測到禁飛區中心經緯度為(30°,40°),禁飛區半徑500 km。通過Dubins曲線的路徑規劃策略生成的起始圓起點經緯度(20.92°,23.71°),旋轉角度θ1=28.07°,旋轉半徑rz1=3750 km,對應的近似解析傾側角大小σrz1=46.99°;校正制導起點經緯度(50.34°,48.80°),具體仿真結果如圖6~9所示。
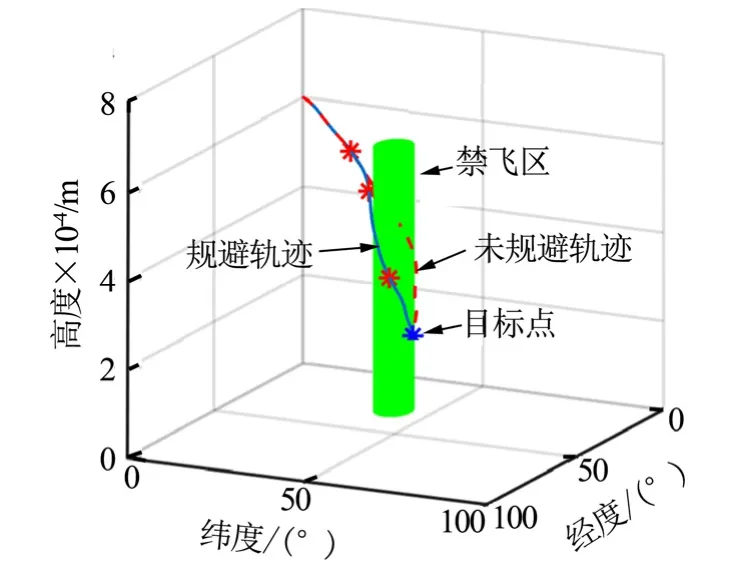
圖6 CAV-H規避禁飛區三維軌跡 Fig.6 Three-dimensional Trajectory Formed by CAV-H Avoiding the No-fly Zone
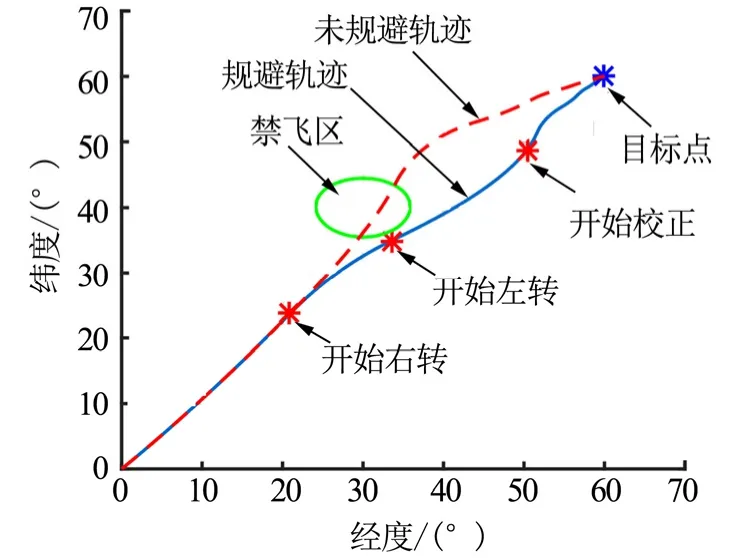
圖7 CAV-H規避禁飛區星下點軌跡 Fig.7 Subsatellite Track Formed by CAV-H Avoiding the No-fly Zone
由圖6、圖7可得,飛行器能夠有效實現禁飛區的規避,其終端脫靶量611.80 m,精度較高。
圖8為飛行器的高度、速度曲線,終端高度誤差15.42 m、速度誤差14.03 m/s,均在合理偏差范圍內,且高度及速變化平穩。
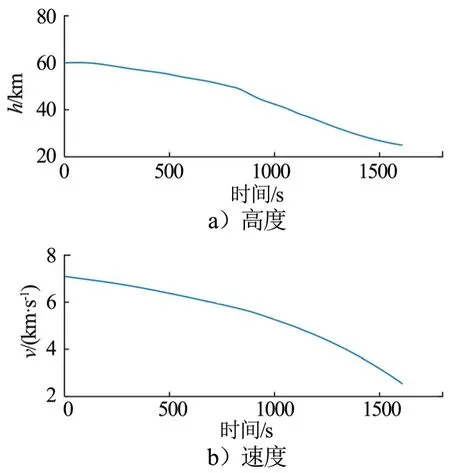
圖8 高度和速度曲線 Fig.8 Height and Velocity Curve
圖9為飛行器的攻角和傾側角曲線。
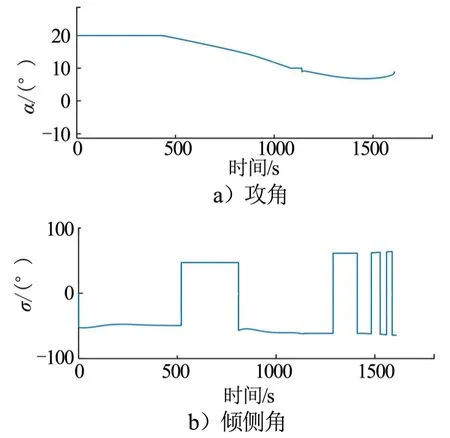
圖9 攻角和傾側角曲線 Fig.9 Angle of Attack and Bank Curve
飛行器分別在519.8 s和809.8 s進行了機動轉彎,實現了禁飛區的繞飛規避和目標的重新瞄準。在接近目標時,攻角逐漸增大校正終端高度,同時連續調整傾側符號修正航向誤差。
4 結 論
本文提出了一種基于近似解析解的制導方法,能夠有效實現禁飛區的繞飛規避,同時滿足終端航程及高度約束,該方法具有以下特點:
a)對飛行器的轉彎能力進行了分析,得到了機動轉彎半徑和傾側角的近似解析關系;
b)結合 Dubins曲線的路徑規劃方法設計規避策略,結構簡單、效率高;
c)通過對航程的解析預測和速度傾角的反饋設計,實現了終端航程及高度的控制,計算效率高、誤差小。
通過數學仿真驗證了算法的有效性,得到的近似解析關系對機動制導算法的設計也具有參考價值,工程實用性強。