新一代大型運載火箭大推力直接入軌高精度姿態控制方法
2021-04-26 06:54:42李學鋒
導彈與航天運載技術 2021年2期
關鍵詞:發動機
黃 聰,張 宇,王 輝,李學鋒,王 碩
(北京航天自動控制研究所,北京,100854)
0 引 言
長征五號B運載火箭(以下簡稱CZ-5B火箭)是長征五號(以下簡稱CZ-5火箭)的一級半構型,由芯一級+助推器+整流罩組成,沒有單獨的調姿和末速修正過程,CZ-5B火箭利用一級火箭直接將空間站的核心艙和實驗艙等送入預定軌道,在一級發動機關機時,約 1400 kN的推力在3~6 s之內消失,相當于一輛高速行駛的火車突然“剎車”,還要穩穩停靠在指定位置,姿態控制難度極大[1,2]。
在火箭主發動機關機后,存在后效推力偏差大、關機時刻機架變形干擾大、渦輪泵停轉干擾大等特點,巨大的液體推進劑晃動導致剛晃和彈晃交聯耦合嚴重[3],考慮到關機后發動機推力迅速下降,姿態控制能力急劇減弱,大幅增加了入軌時刻姿態控制難度。
本文分析了主流運載火箭入軌時刻發動機推力,結合主發動機直接入軌任務特點對不同火箭主要特征參數進行比對,提出了后效飛行段多維增益自適應調整技術,并通過仿真結果與飛行結果驗證了該技術方案的正確性。
1 大推力入軌任務特點
對國內外各型號運載火箭入軌時刻發動機推力當量進行比對分析[4],結果如表1所示。

表1 運載火箭入軌時刻推力比對 Tab.1 Thrust Comparison of Launch Vehicles in Orbit at Home and Aboard
從表1比對結果可以看出,CZ-5B火箭在芯一級入軌時刻推力達到接近140 t。考慮到CZ-5B火箭目標軌道為近地軌道(Low Earth Orbit,LEO),入軌時刻軌道高度較低,若載荷分離姿態控制精度不高可能導致分離失敗,存在載荷再入墜毀導致發射任務失利的風險[5]。
對 3型空間站發射任務運載火箭(CZ-2F、CZ-7與 CZ-5B)大推力入軌時刻箭體特征進行比對,結果如表2所示。

表2 3型空間站發射任務運載火箭大推力入軌特征比對 Tab.2 The High Thrust Orbit Entry Feature Comparison of Three Kinds of Launch Vehicles for Space Station Launch Missions
從表2中的比對結果可以看出:
a)CZ-5B火箭后效沖量及入軌時刻過載更大,對火箭入軌精度影響更加明顯;
b)CZ-5B火箭載荷分離前發動機推力更大,關機后效段干擾更大變化更快,機架變形結構干擾更大,后效段姿態控制的難度顯著提升;
c)CZ-5B火箭關機后效時間更長,相同條件下載荷分離姿態角偏差更大;
d)CZ-5B火箭三通道控制力矩系數更大,相同條件下載荷分離姿態控制精度更低。
綜合以上3型運載火箭特征參數比對結果可看出,在入軌分離時刻,CZ-5B火箭姿態控制難度更大,需要針對CZ-5B火箭入軌時刻箭體特征開展高精度姿態控制技術研究,以提升載荷分離時刻姿態精度。
2 多維增益調整技術
2.1 CZ-5B火箭芯一級控制方案
CZ-5B火箭芯一級采用“姿態角偏差+角速度控制”[6],以實現火箭剛體、液體晃動和彈性振動穩定,控制原理如圖1所示。

圖1 CZ-5B火箭芯一級姿態控制系統原理框圖 Fig.1 The Block Diagram of Attitude Control System for CZ-5B Core 1
其俯仰、偏航和滾動三通道控制方程為

在CZ-5B火箭關機后效控制段,由于滾動通道機架變形、結構、渦輪泵停轉等干擾影響,同時考慮到主發動機關機后火箭控制能力急劇減弱,需自適應調整滾動通道控制參數,實現載荷分離精度提升。
2.2 控制增益自適應調整方法
控制增益自適應調整的本質是通過自適應調節控制器參數,從而消除內外干擾和不確定性,以達到預定的控制性能目標[3]。在CZ-5B火箭主發動機關機后,較大的分離干擾會導致箭體產生明顯的姿態角速度,存在分離姿態偏差較大的風險。利用多維增益調整技術,對關機后效段滾動通道靜態增益和動態增益進行自適應調整,減小系統靜態增益系數,增大系統動態增益系數,讓發動機后效控制能力最大限度修正箭體姿態角速度,使載荷分離精度滿足要求[8]。
以芯一級關機時刻tg_b為切換時間點,在關機前后 滾動通道增益設計采用兩種方式能夠顯著提升載荷分離時刻姿態控制精度:在芯一級關機前采用相對時間插值計算方式,在芯一級關機后滾動通道采用增益自適應調整方式。圖2和圖3分別給出了關機后效段滾動通道靜態增益變化過程和動態增益變化過程。

圖2 關機后效段滾動通道靜態增益變化過程 Fig.2 The Static Gain Change Process of Rolling Channel During Thrust Decay Phase

圖3 關機后效段滾動通道動態增益變化過程 Fig.3 The Dynamic Gain Change Process of Rolling Channel During Thrust Decay Phase
芯一級關機后滾動通道控制增益自適應調整主要由以下4步實現:
a)確定滾動通道增益系數動態調整起始時間tg_b。主發動機關機時刻,滾動通道增益開始執行動態調整,可以通過制導系統發出的關機時間確定時間參數tg_b。
b)確定非線性調節時間t1。發動機推力從關機時刻下降到額定推力 70%的時間,即發動機推力下降到額定推力的 70%時的對應時刻為tg_end,因此非線性調節時間參數滿足t1=tg_end-tg_b。
c)確定時間參數 Δt1。有限制條件 Δt1≤ (tg_end-tg_b)/2,按設計經驗一般令 Δt1≤ (tg_end-tg_b)/3。
d)主發動機關機后滾動通道增益計算。


3 穩定性分析
選擇CZ-5B芯一級關機后0.5 s和1.0 s兩個秒點作為特征秒點,對箭體滾動通道開展穩定性分析,綜合校正網絡后的箭體Nichols曲線如圖4和圖5所示。

圖4 芯一級關機后0.5s滾動通道Nichols對數幅相圖 Fig.4 The Nichols Logarithmic Phase Diagram of Rolling Channel 0.5s Seconds after the Core 1 Shutdown
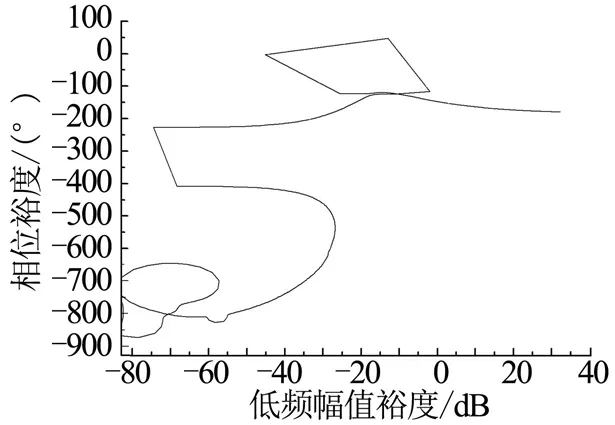
圖5 芯一級關機后1.0 s滾動通道Nichols對數幅相圖 Fig.5 The Nichols Logarithmic Phase Diagram of Rolling Channel 1.0s Seconds after the Core 1 Shutdown
從圖4與圖5分析結果可以看出,在關機后效段0~1 s滾動通道低頻幅值裕度大于-13 dB,剛體相位裕度大于30°,晃動采用相位穩定方式,穩定裕度大于50°,彈性均采用幅值穩定,綜上可以看出,關機后效段滾動通道頻域穩定。
4 仿真結果
在相同初始條件下,分別在芯一級關機后效段滾動通道增益保持與滾動通道增益調整2種控制方式下開展仿真,結果如表3所示。

表3 兩種控制方式下載荷分離時刻滾動通道姿態統計 Tab.3 The Rolling Channel Attitude Statistics by Two Control Modes of the Load Separation Moment
從表3統計結果可以看出,在后效段采用滾動增益保持控制方式時,滾動通道姿態角偏差與姿態角速度明顯偏大,不能有效滿足分離姿態精度要求。
芯一級主發動機后效控制段采用多維增益自適應調整控制方式,系統仿真狀態考慮額定、上限、下限3種狀態,結構干擾考慮正向和負向2種施加方式,在6種組合下開展仿真遍歷,仿真結果如表4所示。

表4 載荷分離時刻滾動通道姿態統計 Tab.4 The Rolling Channel Attitude Statistics of the Load Separation Moment
從表4統計結果可以看出,載荷分離時刻滾動通道姿態角偏差小于3.2°,姿態角速度小于0.6 (°)/s,與指標相比均有 40%以上控制余量,仿真結果表明采用多維增益自適應調整技術后,載荷分離時刻滾動通道姿態控制效果提升明顯,分離精度滿足指標要求。
5 飛行結果
根據CZ-5B火箭遙一飛行遙測結果,船箭分離時刻滾動姿態角偏差和角速度如表5所示。

表5 CZ-5B火箭遙一載荷分離時刻滾動通道姿態統計 Tab.5 The Rolling Channel Attitude Statistics of CZ-5B Y1 Load separation moment
從表5可見,CZ-5B火箭遙一實際飛行載荷分離時刻滾動通道姿態精度極高,姿態角偏差和姿態角速度滿足指標要求且余量較大,表明在芯一級關機后效段采用多維增益自適應調整技術后,有效提升了載荷分離時刻姿態精度。實際飛行結果表明 CZ-5B火箭遙一滾動通道在芯一級后效段增益調整功能實現正確,結果正確。
6 結束語
對于大推力直接入軌運載火箭,在主發動機關機后效控制段,利用多維增益自適應調整控制技術可以有效提升載荷分離時刻姿態控制精度,解決了百噸級大推力直接入軌高精度姿態控制難題,保證了載荷分離安全。
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
汽車維修與保養(2020年11期)2020-06-09 05:42:06
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
汽車維護與修理(2016年3期)2016-02-28 13:16:54
汽車維修與保養(2015年1期)2015-04-17 03:25:30
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年6期)2014-02-27 12:10:49
汽車與新動力(2014年5期)2014-02-27 12:10:41
汽車與新動力(2014年2期)2014-02-27 12:10:15