AIS與GNSS在無(wú)人船橋梁避碰中的應(yīng)用
2021-04-22 06:45:54
探索科學(xué)(學(xué)術(shù)版) 2021年2期
上海海事大學(xué) 上海 浦東 201306
一、無(wú)人駕駛船橋梁避碰的可行性分析
(一)問(wèn)題分析。由于橋梁在船用雷達(dá)中不能準(zhǔn)確的顯示出各個(gè)橋墩的位置,這增加了未來(lái)無(wú)人駕駛船舶撞擊橋梁的風(fēng)險(xiǎn)。一旦船舶和橋梁發(fā)生碰撞,即使航行速度很慢但仍會(huì)造成橋梁和船體的損壞,甚至造成航線的擁堵,再加上后期水上對(duì)船舶與橋梁的修復(fù)的施工困難性,所造成的經(jīng)濟(jì)損失也是十分巨大的。所以十分有必要對(duì)橋梁的橋墩進(jìn)行標(biāo)記來(lái)告知船舶。
船舶自動(dòng)識(shí)別系統(tǒng)(簡(jiǎn)稱(chēng)AIS)可實(shí)時(shí)監(jiān)測(cè)船舶的航向、航速和位置等信息,利用這一實(shí)時(shí)數(shù)據(jù)可對(duì)船舶過(guò)橋時(shí)的運(yùn)動(dòng)狀態(tài)進(jìn)行監(jiān)控,當(dāng)船舶與橋梁將要發(fā)生碰撞危險(xiǎn)時(shí)主動(dòng)對(duì)船舶發(fā)出警報(bào),實(shí)現(xiàn)船橋碰撞預(yù)警。在海洋航行公約中規(guī)定了船舶必須攜帶有AIS收發(fā)裝置來(lái)對(duì)外廣播自身航行信息,同時(shí)收取周邊船只的航行信息。因此,AIS設(shè)備的運(yùn)用與發(fā)展為解決船橋碰撞問(wèn)題提供了新思路。傳統(tǒng)的AIS設(shè)備多為通信中繼或是通信基站的作用,這里可以創(chuàng)新的將其運(yùn)用到船橋避碰系統(tǒng)中。此外,通過(guò)將北斗系統(tǒng)與GPS系統(tǒng)相結(jié)合,利用其各自的優(yōu)勢(shì)實(shí)現(xiàn)對(duì)橋墩的精準(zhǔn)定位,雙系統(tǒng)的結(jié)合提高了整個(gè)系統(tǒng)的精度,進(jìn)而對(duì)船橋避碰裝置的安全性,可靠性和實(shí)用性提供了有力的保障。
(二)總體設(shè)計(jì)思路。近年來(lái)AIS技術(shù)得到了快速發(fā)展,其傳輸?shù)男畔⒅邪舜暗暮较颉⒑剿俸臀恢玫刃畔ⅲ瑸榻鉀Q船橋碰撞問(wèn)題提供了新思路。因此,我們可使用AIS信息中的實(shí)時(shí)數(shù)據(jù)對(duì)船舶過(guò)橋時(shí)的運(yùn)動(dòng)狀態(tài)進(jìn)行監(jiān)控,當(dāng)檢測(cè)船舶有一定的碰撞橋梁的趨勢(shì)時(shí),可以通過(guò)單片機(jī)進(jìn)行計(jì)算來(lái)將正確的航行方向與航行速度傳回給船舶,從而實(shí)現(xiàn)無(wú)人船的安全平穩(wěn)的過(guò)橋。
1.無(wú)人駕駛船橋梁避碰的設(shè)計(jì)框架
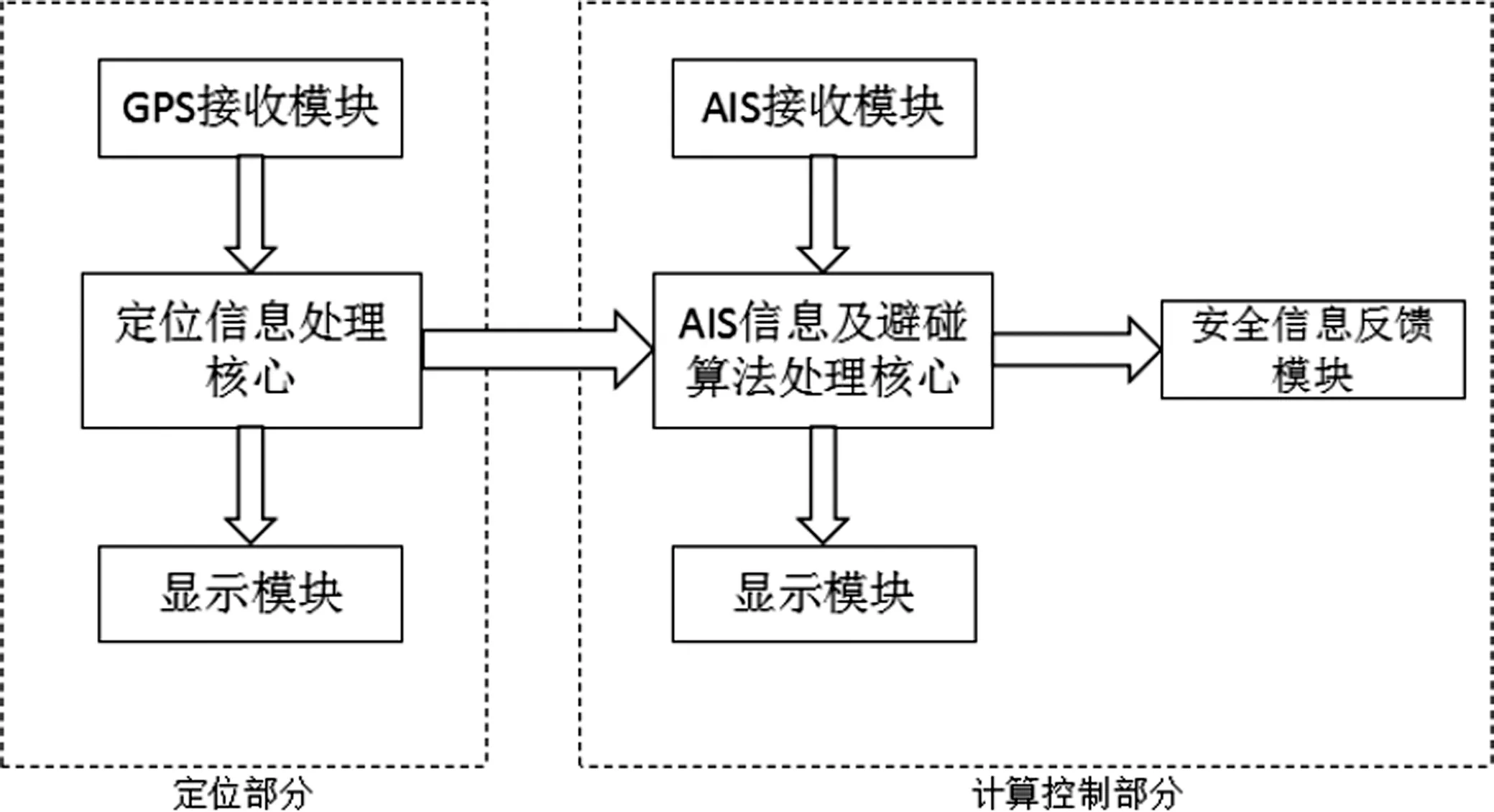
圖1 無(wú)人駕駛船橋梁避碰的設(shè)計(jì)框架圖
定位部分主要是獲取橋梁各個(gè)橋墩的經(jīng)緯度信息和UTC時(shí)間信息,計(jì)算控制部分主要是解析AIS信息數(shù)據(jù),并運(yùn)用一定的避碰算法來(lái)計(jì)算船舶是否具有碰撞橋梁的風(fēng)險(xiǎn)。安全信息反饋模塊可以將正確的航行信息反饋給駛來(lái)的無(wú)人船。
對(duì)于定位部分的實(shí)現(xiàn)可以通過(guò)將多個(gè)用于GPS定位的蘑菇頭分別裝配到每個(gè)橋墩的位置來(lái)實(shí)現(xiàn),而對(duì)于信息的反饋可以通過(guò)簡(jiǎn)單的近距離無(wú)線數(shù)據(jù)傳輸單元來(lái)進(jìn)行實(shí)現(xiàn)。
2.AIS與GPS數(shù)據(jù)的獲取。通過(guò)VHF甚高頻天線,可以獲取到AIS報(bào)文信息,因?yàn)閳?bào)文中數(shù)據(jù)部分是以6bit二進(jìn)制碼存儲(chǔ)的,所以要將報(bào)文中數(shù)據(jù)部分進(jìn)行解算才能更加方便的被我們所使用。接下來(lái)將解析出的二進(jìn)制流參照電文比解析表提取出需要的船舶航速、航向、經(jīng)緯度信息。這樣AIS信息的讀取就完成了。
將用于GPS定位的蘑菇頭放置在橋墩位置,以確定橋墩經(jīng)緯度信息。對(duì)于GPS信息的讀取大多數(shù)模塊使用了NMEA-0183協(xié)議進(jìn)行通信。該協(xié)議以文本方式傳輸數(shù)據(jù),采用ASCII碼來(lái)發(fā)送定位信息。一幀數(shù)據(jù)的格式通常為:MYMaabbb,ccc,ccc,…,ccc*dd(CR)(LF),其中 MYM 表示一幀數(shù)據(jù)開(kāi)始,也就是數(shù)據(jù)讀取的啟示標(biāo)志符;aabbb表示地址域,aa用于信號(hào)識(shí)別,bbb表示語(yǔ)句種類(lèi),根據(jù)這三個(gè)字符可以判斷出一條GPS數(shù)據(jù)是用于哪種信息的傳遞,其中當(dāng)其為GGA時(shí)后面數(shù)據(jù)對(duì)應(yīng)的是當(dāng)前的位置信息,也就是說(shuō),我們只用將這個(gè)數(shù)據(jù)提取出來(lái)即可;ccc...ccc是所傳輸?shù)臄?shù)據(jù);*表示語(yǔ)句數(shù)據(jù)結(jié)束;dd用于一幀數(shù)據(jù)的校驗(yàn);(CR)(LF)回車(chē)和換行字符,表示一幀數(shù)據(jù)結(jié)束。
了解了如何提取數(shù)據(jù)之后便可以在單片機(jī)上進(jìn)行相應(yīng)的編程,來(lái)獲取AIS與GNSS的數(shù)據(jù)用于后續(xù)的處理。
3.嵌入式系統(tǒng)電路部分的設(shè)計(jì)。可以將嵌入式系統(tǒng)的主控芯片與所用引腳的控制與保護(hù)電路以及AIS高頻接收電路、JTAG調(diào)試電路、GPS接收電路、安全信息反饋電路進(jìn)行集成,用單獨(dú)的一塊集成電路來(lái)方便生產(chǎn)與維修更換。
AIS高頻接收電路主要通過(guò)外置天線來(lái)接收采集船舶對(duì)外發(fā)送的信號(hào)來(lái)用以判斷船舶的具體位置。而外部的蘑菇頭接收器則與內(nèi)部的GPS模塊相連接用以內(nèi)部的自身位置的判定,以便完成后期的距離判定。主控芯片用于對(duì)收集到的數(shù)據(jù)進(jìn)行運(yùn)算處理,如果運(yùn)算出無(wú)人船有碰撞橋梁的風(fēng)險(xiǎn)時(shí)其中的安全信息反饋模塊將啟動(dòng),并發(fā)送數(shù)據(jù)以提醒無(wú)人船將會(huì)有撞橋的危險(xiǎn),告知船舶可以根據(jù)傳回的數(shù)據(jù)提示來(lái)改變航行的角度和速度。為了方便對(duì)各個(gè)模塊進(jìn)行分別測(cè)試,加裝了JTAG調(diào)試,對(duì)內(nèi)部結(jié)點(diǎn)進(jìn)行測(cè)試。
為了方便供電,整機(jī)電源可以由外部的220VAC轉(zhuǎn)12V
DC的開(kāi)關(guān)電源接入市電為整機(jī)供電。主板可以將此12V電源分為兩路,一路為AIS高頻接收電路板供電,一路送到集成電路的一級(jí)電源進(jìn)行降壓,將12V電壓降到5V供后續(xù)電路使用。同時(shí)考慮到橋梁上有充足的光能和風(fēng)力資源,也可以在其上加裝小型的光伏或風(fēng)力發(fā)電裝置來(lái)實(shí)現(xiàn)自身的供電。
4.安全信息反饋單元的算法。通過(guò)分析AIS解算出船舶的航向、航速、經(jīng)緯度,通過(guò)GPS確定橋墩位置,將船舶和橋墩放在以正北方向?yàn)閅軸正方向,以正東方向?yàn)閄軸正方向的直角坐標(biāo)系中。通過(guò)解析三角形,獲得DCPA與TCPA。
安全信息反饋單元設(shè)計(jì)圖如下:

圖2 安全信息反饋單元設(shè)計(jì)圖
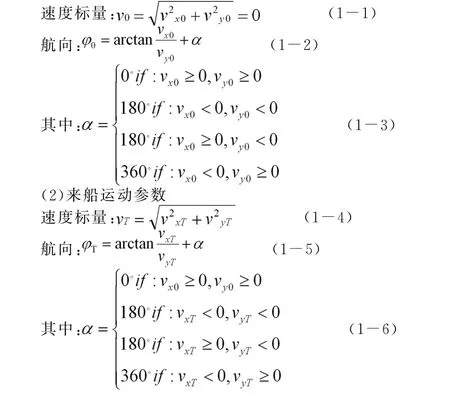
以橋墩為原點(diǎn),建立直角坐標(biāo)系,X軸指向正東,Y軸指向正北,即北方向?yàn)檎龞|方向?yàn)檎蚨誗0的二維坐標(biāo)為(x0,y0),運(yùn)動(dòng)速度為(vx0,vy0);來(lái)船ST坐標(biāo)為(xT,yT),運(yùn)動(dòng)速度為(vxT,vyT),則:
(1)橋墩運(yùn)動(dòng)參數(shù)

(三)應(yīng)用前景。不單單服務(wù)于未的無(wú)人船,在當(dāng)下的船舶運(yùn)輸中,雖然船舶與橋梁發(fā)生碰撞的事故不多,但也不是完全可以避免的,對(duì)于船員的疲勞情況下的誤判斷也可以提供及時(shí)有效的提醒,來(lái)告知其及時(shí)操作船只避免碰撞的發(fā)生。
同時(shí),集成電路也可以擴(kuò)展出其他額外的應(yīng)用,比如現(xiàn)有的橋梁檢測(cè)裝置也可以附加進(jìn)來(lái),這樣不僅不會(huì)增加橋梁的額外負(fù)擔(dān),同時(shí)也擴(kuò)展了原有的檢測(cè)系統(tǒng)的功能,甚至可以實(shí)現(xiàn)多個(gè)設(shè)備的聯(lián)機(jī)來(lái)遠(yuǎn)程管理等也就相當(dāng)于將橋梁這一設(shè)施智能化了。

圖3 船橋避碰矢量三角形
二、結(jié)語(yǔ)
綜上所述,通過(guò)AIS與GNSS的結(jié)合使用可以較好的完成無(wú)人船自主安全過(guò)橋,但對(duì)于一些其他的細(xì)節(jié)性問(wèn)題還需要更多的思考來(lái)進(jìn)行完善。隨著智能化的發(fā)展與壯大,各種智能化的設(shè)備也將越來(lái)越普及,而對(duì)于這些智能化設(shè)備的對(duì)應(yīng)設(shè)施還不夠全面與齊全,對(duì)于未來(lái)的例如無(wú)人船,真正的自主安全運(yùn)行中的一些細(xì)節(jié)性的問(wèn)題還需要更加全面的,細(xì)致的跟進(jìn),本篇文章僅就其中的橋梁避碰這一實(shí)際的問(wèn)題提出一定的解決方案。希望能為未來(lái)智能化設(shè)備的發(fā)展和應(yīng)用提供一定的借鑒參考意義。
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
湖南教育·A版(2019年4期)2019-05-10 03:31:44
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級(jí))(2019年4期)2019-04-22 03:28:24
中華手工(2017年2期)2017-06-06 23:00:31
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:04
中外會(huì)展(2014年4期)2014-11-27 07:46:46
航海(2005年4期)2005-04-29 00:00:00
小雪花·小學(xué)生快樂(lè)作文(2005年9期)2005-04-29 00:00:00
