不同無人機航測影像處理方案效果對比
2021-04-21 01:43:38劉志軍孔祥峰
北京測繪 2021年2期
關鍵詞:優化
劉志軍 孔祥峰
(浙江有色勘測規劃設計有限公司, 浙江 紹興 312000)
0 引言
無人機航空攝影技術在近年來得到了較快的發展,隨著智能、智慧以及大數據的不斷發展,對測繪行業也提出了新的要求,傳統的航空攝影測量在技術和應用領域均存在局限性,因此發展無人機智能測繪成為當下的發展潮流[1-4]。
傳統的無人機航空攝影通常采用地面像控點輔助影像空三解算方式進行建模,但是需要在野外布設大量的像控點才能保證足夠的影像處理精度,將會大大降低測繪工作效率。而無人機搭載POS進行定位時的精度往往難以滿足高精度直接地理定位的相關要求,建立的模型存在明顯的偏差[5-7]。為了提升機載POS數據影像處理精度,達到免像控或者少像控點的目的,減少對人力和資源的消耗,近年來基于GNSS(全球衛星導航定位系統, Global Navigation Satellite System,GNSS) CORS和POS技術的攝影測量方法逐漸發展起來[8-10],但是該方法受CORS基站信號影像較大,有時仍然難以滿足相關精度要求,因此,有必要對無人機航測影像處理方案進行探討。
本文基于無人機航空影像攝影技術,對比分析了6種不同無人機航測影像處理方案的效果,能夠更快速高效地滿足智慧城市建設需要的高精度地理信息產品。
1 試驗概況
1.1 研究區概況
研究區面積約為460 km2,區域內以平原為主,平原海拔30~50 m,同時存在少量的丘陵地帶,丘陵海拔高度未超過200 m,整個地勢呈西北高東南低。
1.2 航測參數
數碼航攝儀采用UCE M3 f100,所采集的地面數據成果分辨率為0.04 m,同時具有高精度POS定姿信息,旁向重疊度和航向重疊度分別為38~44%和66~70%,一條航線的最大和最小飛行航攝之差應≤30 m,實際航高與預設航高的差值應≤5%,傾斜角和旋偏角應分別不大于2°和8°,航線的彎曲度應≤1%,航攝時間選擇在天氣晴朗無云無風的時間段進行,以保證影像的清晰度和飽滿度。
具體的航攝因子為:攝影比例尺1∶10 000,焦距100 mm,像元大小4 μ,幅面大小為26 460×26 460,相對航高1 000 m,絕對航高1 050 m,基準面Qy為40%,航線間隔Dy為635 m,基準面Px為67%,基線Bx為170 m,航線長度為886 km,航線數量為33條,航片數量為3 995張,基準面比例尺為1∶10 000,南北覆蓋因子為50%,東西覆蓋因子為3條基線。
2 影像處理方案
影像處理方案主要分為三類:一是單獨控制點影像處理;二是免像控點影像處理;三是優化POS結合控制點處理。具體方案設置情況見表1。
2.1 單獨控制點影像處理
地面像控點是航測影像控制加密和測圖的基礎,能夠提高航測影像精度的作用,通過在影像顯著點、拐角點、固定物或者十字相交并且具有明顯界限的物體上布設像控點,并將采集好的像控點數據導入Smart3D 軟件,經影像校正、模型制作和影像處理等過程,再通過空三解算和模型輸出,在只有像控帶點平差情況下,對檢查點的模型坐標進行精度檢驗。本文在航攝影像數據基礎上,選擇30個點作為像控點,并另外選取30個點作為地面檢查點。
2.2 免像控點影像處理
免像控處理是在機載POS數據基礎上,根據研究區與不同CORS基站的距離以及整周模糊度固定率大小對POS數據進行優化處理(GNSS差分處理),獲得外方位元素,然后進行影像處理和立體建模,最終在模型影像中選擇地物點作為檢查點進行實測,并計算模型坐標值與實測坐標值的誤差,得到不同處理方案的精度。在研究區附近共有三個不同的CORS基站(編號分別為A、B、C),距離研究區的距離分別為26 km,10 km和2 km,模糊度固定率分別為58.8%、
91.7%和97%。免像控點影像處理方案共設置四種:(1)基于原始機載POS數據的模型構建;(2)基于ACORS基站優化POS數據模型構建;(3)基于BCORS基站優化POS數據模型構建;(4)基于B-CCORS多基站優化POS數據模型構建。每種處理方案均選擇60個檢查點進行精度檢驗。
2.3 優化POS結合控制點處理
在基于B-CCORS多基站優化POS數據基礎上,利用少量的地面控制點(本文選擇3個控制點且三個控制點在研究區內呈三角均勻分布)進行影像處理和建模,然后另外選擇30個檢查點進行精度檢驗。
3 效果對比
3.1 檢查點坐標與模型坐標差值
試驗得到的不同航空影像處理方案下的模型坐標值與檢查點坐標值之間的誤差(Δx、Δy和Δh)情況見表2。從表中可以看到:在單獨控制點影像處理方案下,點數30個,Δx、Δy和Δh的最大值分別為0.075、0.108和0.208 m,最小值分別為0.003、0和0.01 m;在原始POS數據影像處理方案下,點數60個,Δx、Δy和Δh的最大值分別為5.403、7.051和8.727 m,最小值分別為0.03、0.045和3.082 m;在ACORS基站優化 POS數據影像處理方案下,點數60個,Δx、Δy和Δh的最大值分別為2.056、2.041和1.487 m,最小值分別為0.006、0.025和0.013 m;在BCORS基站優化POS數據影像處理方案下,點數60個,Δx、Δy和Δh的最大值分別為0.686、0.660和1.190 m,最小值分別為0.341、0.097和0.352 m;在B-CCORS多基站優化POS數據影像處理方案下,點數30個,Δx、Δy和Δh的最大值分別為1.108、0.873和1.799 m,最小值分別為0.022、0.016和0.016 m;在B-CCORS多基站優化POS數據+3控制點影像處理方案下,點數30個,Δx、Δy和Δh的最大值分別為0.155、0.141和0.878 m,最小值分別為0.004、0.001和0.012 m。從6種影像處理方案的坐標差值來看,使用單獨控制點影像處理方案的坐標誤差最小,其次為多基站優化POS數據+3控制點影像處理方案,采用原始POS數據影像處理方案時的坐標誤差值最大。

表1 不同影像處理方案
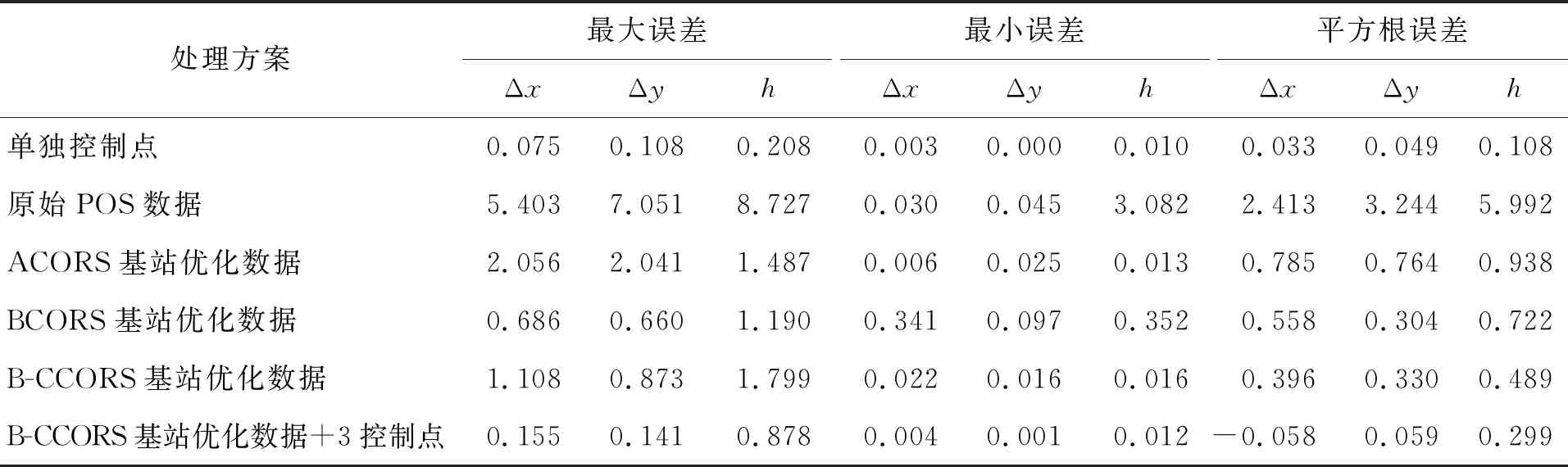
表2 不同影像處理方案下坐標誤差情況 單位:m
3.2 精度評定
不同處理方案下的地物點坐標精度情況見圖1。從圖中可以看到,方案二(原始POS數據)的平面中誤差和高程中誤差最大,分別達到4.043和5.992 m,方案一(單獨控制點)的平面中誤差和高程中誤差最小,分別為0.059和0.108 m。根據GB/T 7930—2008《1∶500 1∶1 000 1∶2 000地形圖航空攝影測量內業規范》的相關規定,在不同比例尺下的地物點平面和高程精度誤差限制情況見表3。結合圖1和表3數據可知,單獨像控點影像處理方案下的平面和高程精度滿足1∶500大比例尺精度要求,當采用原始POS數據和ACORS基站優化POS數據影像處理方案時,不能滿足相關規范要求,當采用距離較近和模糊固定率較高的BCORS基站優化POS數據影像處理方案時,基本滿足1∶2 000比例尺精度要求,當采用B-CCORS多基站優化POS數據影像處理方案時,滿足1∶1 000比例尺精度要求,當采用多基站POS優化數據+3控制點影像處理方案時,滿足1∶500比例尺精度要求。

表3 不同比例尺地物點的中誤差限值 單位:m

圖1 不同影像處理方案精度分析結果
3.3 討論
從整體效果來講:利用機載POS數據、GNSS不等距離單基準站和多基準站優化的POS數據影像處理方案的精度不如控制點影像處理方案的精度,這主要是因為機載POS系統與測量相機的位置本身存在一定的高程偏差,因而在影像處理過程中會產生一定的系統誤差,同時在低飛行高度時,機載POS系統信號容易受到外界環境的干擾,因而也會造成一定的偏差。當采用CORS基站優化POS數據進行建模時,距離越近和模糊固定率較高的處理方案精度更佳,多基準CORS基站優化POS數據的處理效果優于單基準CORS基站優化POS數據的處理效果。基于多基準CORS基站優化POS數據+3控制點影像處理方案的精度與單獨控制點影像處理的方案的精度基本相當,而且,可以很大程度上減輕外業作業像控點的布設工作量,對于提高整體的航測工作效率具有重要意義,當設備及環境條件允許時,推薦使用此方案進行無人機航測影像處理。
4 結束語
通過對6種不同無人機影像處理方案的誤差和精度對比,得出以下幾個結論:
(1)利用機載POS數據或者CORS基站優化POS數據進行影像數據處理時的精度不如控制點影像處理方案的精度。
(2)距離越近和模糊固定率越高的CORS基站優化POS數據影像數據處理精度越好,多基準CORS基站優化POS數據的處理效果優于單基準CORS基站優化POS數據的處理效果。
(3)單獨控制點和多基準CORS基站優化POS數據+3控制點處理方案的精度滿足1∶500比例尺精度要求,BCORS基站優化POS數據處理方案精度滿足1∶2 000比例尺精度要求,B-CCORS多基站優化POS數據影像處理方案精度滿足1∶1 000比例尺精度要求。
(4)在設備和環境條件允許下,推薦采用(單)多CORS基站優化POS數據結合控制點方式進行影像處理。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
