車載激光掃描系統(tǒng)在建筑立面測量中的應(yīng)用
2021-04-21 01:43:16戶忠祥韓友美張攀科劉東明王懂懂
北京測繪 2021年2期
戶忠祥 韓友美 張攀科 劉東明 王懂懂
(1. 江蘇海洋大學(xué) 海洋技術(shù)與測繪學(xué)院, 江蘇 連云港 222000; 2. 北京四維遠(yuǎn)見信息技術(shù)有限公司, 北京 100039)
0 引言
隨著我國城鎮(zhèn)化進(jìn)程的加快,城市面貌日新月異,與此同時(shí)智慧城市建設(shè)步伐也在不斷推進(jìn)。建筑物是智慧城市的主體內(nèi)容之一,其立面測量工作顯得尤為重要。另外建筑立面圖的需求不斷擴(kuò)大,主要有以下幾個(gè)方面:城市規(guī)劃,在原有建筑物基礎(chǔ)上進(jìn)行規(guī)劃設(shè)計(jì)的工程實(shí)例越來越多,需要快速精確地獲取建筑物外立面的數(shù)字線劃圖[1];建筑立面整治,美麗街區(qū)設(shè)計(jì)[2];舊城改造,城市的舊城改造因建筑年久失修及設(shè)計(jì)圖紙缺失,用測繪手段逆向獲取建筑立面圖紙[3];為規(guī)劃審批提供現(xiàn)狀建筑物立面窗洞的精確位置和尺寸,以進(jìn)行日照模擬分析[4]等。傳統(tǒng)的建筑立面測量方法主要有三種:一是手工測量方法,也就是利用挑桿、掛尺、鋼尺、卷尺等配合進(jìn)行測量,結(jié)合草圖進(jìn)行繪圖;二是攝影測量的方式,采用近景攝影測量方法進(jìn)行測量,也就是通過解算數(shù)碼相機(jī)的內(nèi)、外方位元素,以數(shù)字方式存儲影像為基礎(chǔ),在計(jì)算機(jī)上進(jìn)行內(nèi)業(yè)數(shù)據(jù)處理,通過計(jì)算、平差獲取目標(biāo)空間坐標(biāo)進(jìn)行繪圖;三是工程測繪方法,即利用全站儀獲取建筑物的三維坐標(biāo),建筑物外輪廓重要特征點(diǎn),如窗戶、門等,再配合人工手繪的草圖,在繪圖軟件中繪制成圖[5]。以上方法存在采集點(diǎn)位信息的工作量較大,人工參與度較高,具有一定的危險(xiǎn)性等問題。因此,為了迎合各類需求、提高建筑立面測量效率,有必要探索新的技術(shù)方法。
近年來三維激光技術(shù)逐步發(fā)展起來,其具有實(shí)時(shí)性、主動性、非接觸、面測量的優(yōu)點(diǎn),可用來快速獲取大量的地物三維信息。目前三維激光掃描測繪系統(tǒng)依據(jù)承載平臺可劃分為星載激光掃描儀、機(jī)載激光掃描系統(tǒng)、車載激光掃描系統(tǒng)、地面三維激光掃描系統(tǒng)和手持式激光掃描系統(tǒng)五大類[6]。很多學(xué)者將地面三維激光掃描系統(tǒng)運(yùn)用到建筑物立面測量中去,李婉、黃雪等利用地面三維激光掃描儀對建筑物進(jìn)行立面測量,坐標(biāo)系為建筑坐標(biāo)系[7-8]。張文洪等采用首先進(jìn)行觀測控制網(wǎng)的布設(shè),其次確定掃描站點(diǎn)的方法來獲取絕對坐標(biāo)值[9]。彭勁松采用RTK或全站儀采集測站外部坐標(biāo)方法進(jìn)行后續(xù)配準(zhǔn)拼接坐標(biāo)轉(zhuǎn)換[10]。但是由于單站的測量范圍有限,面對大范圍的建筑物外立面測量時(shí),需要多次搬站,大大降低了數(shù)據(jù)采集效率。
車載激光掃描系統(tǒng)能夠快速獲得高精度、高密、度大量的目標(biāo)物三維真實(shí)坐標(biāo),越來越多的學(xué)者研究車載激光掃描系統(tǒng)的應(yīng)用方向,主要有以下幾個(gè)方面:道路竣工測量[11]、道路斷面采集[12]、地籍測量[13]、城市大型立交橋三維建模[14]。車載激光掃描系統(tǒng)通過載體的移動能夠快速獲取大面積點(diǎn)云,點(diǎn)云數(shù)據(jù)成果為絕對坐標(biāo)系,無須站間拼接,往返掃描補(bǔ)充遮擋缺失區(qū)域。本文采用北京四維遠(yuǎn)見信息技術(shù)有限公司自主研發(fā)的SSW車載激光建模測量系統(tǒng)設(shè)計(jì)了建筑物立面測量技術(shù)方案,并用實(shí)驗(yàn)對其進(jìn)行了驗(yàn)證。
1 車載激光掃描系統(tǒng)組成及工作原理
車載激光掃描系統(tǒng)由車載平臺、激光掃描儀、全球定位系統(tǒng)(Global Navigation Satellite System,GNSS)、慣性測量單元(Inertial Measurement Unit,IMU)、里程計(jì)(Distance Measuring Instruments,DMI)、紋理采集系統(tǒng)、控制系統(tǒng)、電源系統(tǒng)等構(gòu)成[15]。


(1)
其中,α、β分別為激光掃描儀內(nèi)部的激光反射鏡在水平方向的旋轉(zhuǎn)角度和在豎直方向的旋轉(zhuǎn)角度。
絕對坐標(biāo)的測量是由GNSS、IMU和里程計(jì)信息實(shí)現(xiàn),利用GNSS對系統(tǒng)進(jìn)行初始定位,IMU進(jìn)行初始對準(zhǔn),獲得開始測量時(shí)的系統(tǒng)準(zhǔn)確的坐標(biāo)和姿態(tài),結(jié)合GNSS、IMU和里程計(jì)的組合導(dǎo)航獲取激光掃描儀的準(zhǔn)確坐標(biāo),再加上以激光掃描儀為中心的局部坐標(biāo)系,通過坐標(biāo)軸的旋轉(zhuǎn)變換從而實(shí)現(xiàn)目標(biāo)反射點(diǎn)的絕對坐標(biāo)計(jì)算。
目標(biāo)物的表面紋理信息由相機(jī)進(jìn)行采集,同時(shí)還會有一個(gè)相機(jī)的曝光返回時(shí)間,用來記錄像機(jī)曝光時(shí)刻的時(shí)間,通過和軌跡結(jié)合計(jì)算出外方位元素[15],以便于后期對目標(biāo)物進(jìn)行紋理匹配。
以上所有的傳感器都是通過時(shí)間同步控制器觸發(fā)脈沖實(shí)現(xiàn)數(shù)據(jù)的同步采集,車載上方的平臺將所有傳感器固定在一起,這樣就保證了傳感器與平臺之間的姿態(tài)是同步的,各傳感器之間的坐標(biāo)關(guān)系就可以確定。各傳感器之間的相對位置關(guān)系與姿態(tài),即它們的相對外方位元素的測定是由外業(yè)掃描檢校場來完成的。
2 車載激光掃描建筑物立面測量方案設(shè)計(jì)
基于車載激光掃描系統(tǒng)特點(diǎn),設(shè)計(jì)了建筑物立面測量的技術(shù)方案如圖1所示。

圖1 車載激光掃描建筑物立面測量技術(shù)方案
2.1 測區(qū)確定及勘察
首先明確數(shù)據(jù)采集的范圍,即確定測區(qū)。其次車輛在進(jìn)行外業(yè)數(shù)據(jù)采集時(shí),可能因?yàn)橐恍┮馔獾牡缆方煌ㄇ闆r而影響行駛路線和采集范圍,進(jìn)而影響作業(yè)有效率,所以在開展車載測量之前有必要對測區(qū)進(jìn)行初步地勘察,勘察可采用實(shí)地勘察或地圖觀察,以便于確定正式作業(yè)時(shí)的行駛路線。
2.2 外業(yè)數(shù)據(jù)獲取
外業(yè)數(shù)據(jù)采集是車載系統(tǒng)到達(dá)測區(qū)后,架設(shè)GNSS基站,選擇附近無高大樹木與建筑物的空曠地帶進(jìn)行初始化,主要為GNSS定位與IMU地對準(zhǔn),初始化之前通過控制軟件設(shè)置各項(xiàng)傳感器的采集參數(shù),如激光掃描的設(shè)置參數(shù)有脈沖發(fā)射頻率等。初始化工作結(jié)束后,按照設(shè)計(jì)好的行車路線進(jìn)行掃描作業(yè)。
對于道路兩側(cè)樹木遮擋嚴(yán)重的地區(qū)可以采用大車先掃描,小車后補(bǔ)掃的方法進(jìn)行,即大車按正常作業(yè)掃描之后,再把掃描測量設(shè)備固定在小的移動平臺上,如電動三輪車,小車在人行道上行駛進(jìn)行補(bǔ)掃,能達(dá)到掃描范圍的最大覆蓋。
掃描作業(yè)完成后,同樣選擇GNSS信號干擾少的地點(diǎn)進(jìn)行結(jié)束化,將采集的原始數(shù)據(jù)拷貝到電腦計(jì)算機(jī)內(nèi),方便后續(xù)內(nèi)業(yè)處理。
2.3 內(nèi)業(yè)數(shù)據(jù)處理
內(nèi)業(yè)數(shù)據(jù)處理時(shí),首先需要將原始數(shù)據(jù)如GNSS數(shù)據(jù)、IMU數(shù)據(jù)、里程計(jì)數(shù)據(jù)、相機(jī)照片、激光數(shù)據(jù)等進(jìn)行預(yù)處理,主要是解碼與轉(zhuǎn)換格式,預(yù)處理結(jié)束之后使用商業(yè)軟件IE(Inertial Explorer)將里程計(jì)數(shù)據(jù)、IMU數(shù)據(jù)、GNSS數(shù)據(jù)進(jìn)行組合導(dǎo)航解算,生成行車采集的軌跡信息。最后將激光點(diǎn)云數(shù)據(jù)與組合導(dǎo)航解算結(jié)果進(jìn)行融合,得到有位置和姿態(tài)信息的點(diǎn)云數(shù)據(jù),實(shí)現(xiàn)點(diǎn)云坐標(biāo)的重新定位和賦值。
在點(diǎn)云工作站內(nèi)加載融合后的點(diǎn)云數(shù)據(jù),進(jìn)行點(diǎn)云的去噪,主要是過濾掉空氣中的噪聲點(diǎn)等。一個(gè)比較簡單常用的方法就是移除離群點(diǎn),根據(jù)空間點(diǎn)半徑范圍鄰近點(diǎn)數(shù)量來濾波,在點(diǎn)云數(shù)據(jù)中,設(shè)定每個(gè)點(diǎn)一定半徑范圍內(nèi)周圍至少有足夠多的近鄰,不滿足就會被刪除。
2.4 立面圖編輯與成圖
進(jìn)行立面圖編輯時(shí),選擇合適視角建立輔助面,在輔助面上進(jìn)行矢量編輯,確保所有矢量都在一個(gè)立面上,空間中的點(diǎn)云投影到立面的原理如下:
已知空間中三個(gè)點(diǎn)P1(x1,y1,z1),P2(x2,y2,z2),P3(x3,y3,z3),能夠唯一確定一個(gè)空間平面方程Ax+By+Cz+D=0,其中:
(2)

(3)
(4)
將(3)、(4)兩個(gè)式子代入平面方程Ax+By+Cz+D=0,可以解得:
(5)
從而可以解得
(6)
(7)
由此得到空間三維點(diǎn)P0(x0,y0,z0)在平面內(nèi)的投影坐標(biāo)P(xp,yp,zp)。
(8)
解得
(9)
由此得到旋轉(zhuǎn)后的水平面坐標(biāo)(x′,y′,0)。
立面編輯完成之后將其旋轉(zhuǎn)至水平面,在點(diǎn)云處理軟件中導(dǎo)出DXF格式加載到CAD中顯示,最終成圖。
2.5 精度評定
外業(yè)作業(yè)時(shí),實(shí)地用手持激光測距儀量測一些門窗的長度,并在繪制的立面圖中選擇同樣門窗位置進(jìn)行量取,以便對立面圖成果進(jìn)行精度評定。
3 車載掃描實(shí)驗(yàn)
本次實(shí)驗(yàn)采集的區(qū)域?yàn)樯轿饔矣窨h玉林東西街,長約2.5 km,采集道路兩側(cè)的建筑物立面信息,測區(qū)范圍為城市道路,地形平坦、沿路方向通視良好,但道路兩側(cè)有機(jī)動車輛停放,對三維掃描測量有一定影響。
本次實(shí)驗(yàn)采用的是RIGEL VUX-1HA激光掃描儀,激光脈沖發(fā)射頻率最大1 000 kHz,激光掃描線頻最大250 Hz,最大測程為420 m,目標(biāo)反射率80%,視場范圍360°,測量精度能夠達(dá)到5 mm。整個(gè)測量外業(yè)包括系統(tǒng)初始化和結(jié)束化時(shí)間,共用時(shí)2 h,外業(yè)采集結(jié)束后,將相關(guān)采集的原始數(shù)據(jù)拷貝到電腦計(jì)算機(jī)內(nèi),為內(nèi)業(yè)數(shù)據(jù)處理做準(zhǔn)備。
對外業(yè)采集數(shù)據(jù)進(jìn)行處理,組合導(dǎo)航生成車行掃描軌跡,再利用點(diǎn)云生產(chǎn)軟件將激光原始數(shù)據(jù)與軌跡數(shù)據(jù)進(jìn)行融合生成點(diǎn)云數(shù)據(jù),內(nèi)業(yè)數(shù)據(jù)解算共用時(shí)3 h。在SSW車載激光建模測量系統(tǒng)配套的SWDY點(diǎn)云工作站中將融合后的點(diǎn)云數(shù)據(jù)加載顯示,圖2與圖3分別為點(diǎn)云圖和建筑物影像圖。

圖2 點(diǎn)云圖

圖3 建筑物影像圖
在點(diǎn)云工作站進(jìn)行人機(jī)交互的矢量編輯。建立輔助面圖層,以確保所畫的圖形都在一個(gè)立面上,每個(gè)人的立面矢量編輯作業(yè)效率為300 m/d,編輯完成之后選擇處理軟件的立面矢量旋轉(zhuǎn)到水平面功能進(jìn)行投影,得到二維的建筑物立面圖。導(dǎo)出DXF格式到AutoCAD中加載顯示。
博世GLM7000手持激光測距儀的測量精度為1.5 mm,用其對一些門、窗等結(jié)構(gòu)進(jìn)行丈量并與立面圖中門窗的量取值做比較,對比結(jié)果如表1所示。
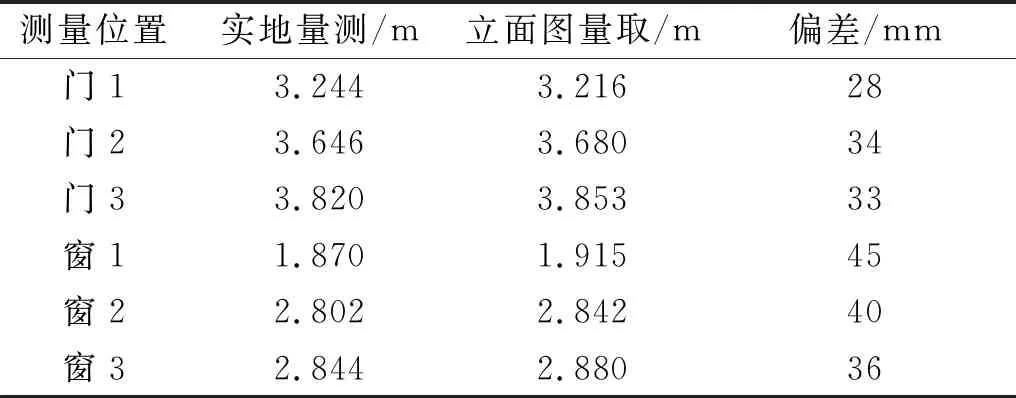
表1 建筑物立面測量精度
從抽樣結(jié)果可以看出窗戶的量測精度相對偏低,分析原因是點(diǎn)云采集時(shí),由于玻璃材質(zhì)對點(diǎn)云的反射產(chǎn)生了干擾,還有人工選取門窗角點(diǎn)附近最近的點(diǎn)云帶來的誤差,進(jìn)而影響立面圖的繪制。總體而言平均偏差在36 mm左右。
4 結(jié)束語
本文嘗試將車載激光掃描系統(tǒng)運(yùn)用到建筑物外立面的測繪工作中,設(shè)計(jì)了一套高效的立面圖測繪方法。該方法充分借助車載激光掃描系統(tǒng)的移動速度快、獲取點(diǎn)云信息量大、無須站間拼接的優(yōu)勢,大大節(jié)省了外業(yè)作業(yè)時(shí)間,提高了建筑物立面圖的測繪效率,同時(shí)改善了測量人員的工作環(huán)境,減輕外業(yè)人員勞動強(qiáng)度。內(nèi)業(yè)方面,研究了立面圖繪制的原理,結(jié)合車載激光掃描系統(tǒng)SSW的后處理軟件,人機(jī)交互地完成了基于激光點(diǎn)云數(shù)據(jù)快速繪制建筑立面圖,數(shù)據(jù)處理自動化程度高,建筑物立面測量精度較高,立面圖繪制成圖人機(jī)交互環(huán)境友好。本文提出的建筑物立面測量的實(shí)施技術(shù)方案,通過實(shí)驗(yàn)驗(yàn)證了此方案的可行性與高效性,對于得到的建筑物外立面圖,后續(xù)可用于制作BIM模型等其他用途。同時(shí)本文的研究也為車載激光掃描系統(tǒng)的廣泛應(yīng)用提供了參考,并對相關(guān)項(xiàng)目實(shí)施有一定的借鑒意義。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
