負壓波管道泄漏監測技術的探討及改進
2021-04-20 03:15:04趙勇蔡立
石油庫與加油站 2021年6期
趙 勇 蔡 立
〔國家石油天然氣管網集團有限公司華中分公司 湖北武漢 430000〕
經過100多年的發展,石油輸送方式已由較單一的公路運輸發展成為包括空運、鐵路、海運和管道在內的五大輸送方式,形成五大輸送系統。因為管道輸送具有成本低、供給穩定、節能、安全等優點而被廣泛應用于油氣運輸領域[1]。但是,隨著管道服役年限的延長,由于腐蝕磨損等自然和人為因素,使管道泄漏時有發生。據統計,1986年以前修建的輸油管線平均穿孔率為每年0.66次/km[2]。這些事故給管道的正常運行及人民生命財產安全和生態環境保護帶來了嚴重威脅[3]。建立高效的管道泄漏監測系統,提升現有管道泄漏監測系統的準確性,對及時發現管道泄漏事故并快速精準定位,指導和開展泄漏事故的搶險工作,防止和減少因泄漏引起的次生災害具有重要意義。
1 目前管道泄漏監測的主要方法
目前國內外使用的管道泄漏監測的主要方法有以下幾種,分別為:流量平衡法、建模監測法和基于信號處理的監測方法,而這些方法都存在一定局限性(詳見表1),使用時要區別對待。在以上諸多的管道泄漏監測方法中,目前國內外研究和采用較多的是基于壓力信號處理分析的負壓波監測法。

表1 監測方法及其局限性
2 負壓波泄漏監測法的原理、優點及局限性
負壓波監測法具有定位準確、算法靈活、對硬件要求不高等優點,是目前國內外研究應用較多的對管道實時泄漏監測和定位的方法。
2.1 原理
當流體輸送管道因人為、機械破壞、材料失效等原因發生泄漏時,管道內高壓流體在內外壓差作用下迅速流失,引起管道內該點的壓力降低,介質在泄漏點和其相鄰空間產生壓差,使管道內的高壓流體流向泄漏點的低壓區域,引起與泄漏點相鄰區域的流體質點減少和壓力降低,產生負壓波。由于流體傳導作用,負壓波能傳播到數十公里外的遠端,在管道兩端安裝壓力傳感器如能夠捕捉到包含泄漏信息的瞬間負壓波,就可以監測到泄漏的發生,并根據瞬間負壓波到達管道兩端的時間差進行泄漏點定位,見圖1。
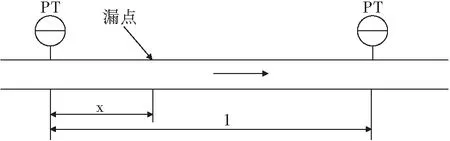
圖1 負壓波定位示意圖
假設負壓波在管道中的傳播速度為v,管道上、下游壓力傳感器捕捉到負壓波到達的時間差為△t,管道總長度為l,泄漏點距離上游壓力變送器的距離為x,則有下列計算公式(1)和(2):
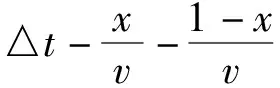
(1)
解得
(2)
其中:x為泄漏點距上游站壓力變送器的距離,m;
l為上下游站場站間距,m;
v為負壓波傳播速度,m/s;
△t為負壓波傳導至上下游站場的時間差,s。
2.2 負壓波監測法的局限性
該項技術的分析方法對于突發性泄漏比較敏感,適合監測因人為破壞引起的泄漏。但對于緩慢的腐蝕滲漏并不十分敏感。對于一般輸送石油的鋼質管道而言,負壓波傳播速度約為1000~1200 m/s。由于其遠遠大于介質流速,從上面的公式中可以看出該方法對上下游傳感器的響應時間有很高的要求,一旦有零點幾秒的延遲,便可能產生幾百米誤差。同時,管道的長度也決定了信號會經歷各種復雜的情況,各種電磁干擾會導致采集到的壓力波信號帶有大量噪聲,如果不對噪音信號加以處理,則會導致大量的錯誤報警。因此,需要采用多種措施對負壓波法進行改進,提升報警的準確性。
3 改進方法
3.1 負壓波波速的確定
要準確確定泄漏點的位置,需要測定出不同工況下負壓波的波速。在傳統的常波速泄漏定位方法中,負壓波在管道中傳播的速度被視為常數,通常在1000~1200 m/s之間。但實際上負壓波的傳播速度取決于油品和管道的性質,可采用下面公式(3)計算不同工況下的負壓波波速:
(3)
其中:v為管道內負壓波的傳播速度,m/s;
k為液體的體積彈性系數,Pa;
ρ為液體的密度,kg/m3;
E為管材的彈性模量,Pa;
D為管道直徑,m;
e為管壁厚度,m;
c為與管道約束條件有關的修正系數。
式中,液體的體積彈性系數k與密度ρ隨液體溫度變化,可以通過查表后計算得出。
3.2 結合工況調整降低誤報率
管道工況調整會產生相應的水力參數的改變(表2),過濾掉各種工況調整所產生的過渡態信號,可最大程度降低誤報率,提升報警的準確性。
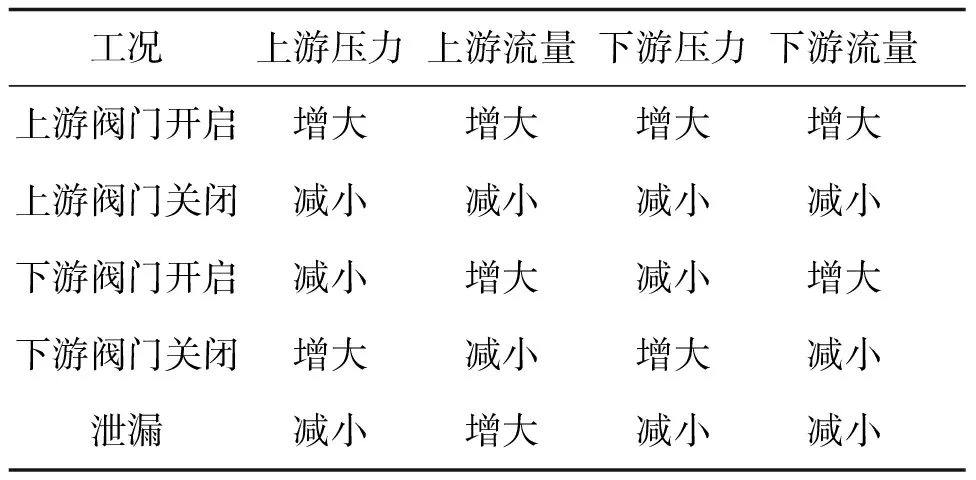
表2 工況調整導致水力參數的變化趨勢
該水力參數瞬態識別法的優點在于不需要建立復雜的管道水力模型,通過獲取管道上下游的流量和壓力等少數幾個特征參數,結合PLC控制信號分析,便可進行各種工況的識別,可大大減少計算的工作量,響應時間快,降低了誤報率。
3.3 負壓波法耦合流量(體積)法
平衡狀態下管道內的輸入流量(體積)與輸出流量(體積)始終相等。因此,在系統發出泄漏報警前,可對流量數據進行一次比對,來判斷泄漏事故是否發生。當出現負壓波變化,而流量無明顯變化時,系統將不會發出報警,而是將事件記錄為預警,通過后期監測,進一步確定事件類型。同時,若泄漏發生時,通過將前后流量差值對時間進行積分,可計算出管道內油品的泄漏量,以便后期評估經濟損失。
3.4 系統時間校正
上下游站場工控機系統時間的統一對泄漏點定位準確性有重要作用。管道上下游兩端采用計算機系統進行數據處理和分析等工作,即便兩臺規格相同的工控機放在一起運行數小時也會產生一秒至數秒鐘的誤差,系統時間不統一在所難免。因此,工控機系統時間要經常加以校正,一種簡單的方法是用一端的系統時間去校正另一端的系統時間,這對兩站點系統來說簡單可行,每次校正時間,兩臺工控機便發生一次通訊。但對多站點系統來說,這就要求各站間定時通訊,會大大增加系統的通訊負荷。GPS系統自問世以來,己充分顯示了其在導航、定位、授時領域的霸主地位[4]。隨著該系統快速發展和廣泛運用,利用其來對各站工控機的系統統一授時,可以很好地解決時間不一致的問題。
3.5 負壓波法結合小波去噪分析法
管道的長度決定了負壓波在傳播過程中不可避免地會產生大量的噪聲干擾,管道越長,噪聲干擾越頻繁。為此可以利用小波變換對噪聲信號不敏感的特性以及其對信號突變的良好監測能力,準確提取壓力信號突降的時刻來準確捕捉負壓波信號。
該計算方法可以對管道壓力信號進行預處理使其更具特征性。通過一定程度的伸縮平移計算和特征頻率分析,分別對上下游壓力信號進行不同尺度小波變換,然后對其高頻部分進行平均,綜合考慮上下游壓力信號在相同頻率下的小波變換模極大值,并與給定的閾值比較,判斷管道是否發生了泄漏,降低了噪音干擾,成為繼Fourier變換以來在科學判斷方法上的重大突破。
4 結束語
以負壓波監測技術作為理論基礎建立起來的管道泄漏監測系統被廣泛運用于生產實踐中。它與多種方法結合使用能夠有效地提升泄漏報警的時效性和準確性,降低誤報率。隨著科技發展的日新月異,以無人機技術和第五代移動通信技術等為代表的新興科技會更多地運用于安全生產領域,這些都有待于更進一步的研究和探討。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34