基于無(wú)源偵察幅度的相控陣?yán)走_(dá)工作模式仿真
2021-04-20 06:33:34藺誠(chéng)毅徐偉
電子技術(shù)與軟件工程 2021年3期
藺誠(chéng)毅 徐偉
(西安電子工程研究所 陜西省西安市 710100)
1 引言
電子戰(zhàn)在現(xiàn)代信息化戰(zhàn)爭(zhēng)中扮演著極其主要的角色,已經(jīng)成為了決定戰(zhàn)爭(zhēng)勝敗的關(guān)鍵因素。電子偵察作為電子戰(zhàn)的重要組成部分,對(duì)戰(zhàn)場(chǎng)電磁態(tài)勢(shì)感知、信息融合、作戰(zhàn)部署起著重要作用。一方面隨著賦予雷達(dá)觀測(cè)任務(wù)的不斷增加,另一方面也隨著電子技術(shù)的不斷發(fā)展,傳統(tǒng)的的機(jī)掃雷達(dá)已經(jīng)在功能和性能上很難滿足當(dāng)代戰(zhàn)爭(zhēng)需求,而相控陣?yán)走_(dá)以其天線波束快速掃描、波形快速截變、空間功率合成、多波束形成靈活以及多目標(biāo)處理等優(yōu)勢(shì),在現(xiàn)代戰(zhàn)爭(zhēng)中得到了廣泛應(yīng)用,在未來(lái)戰(zhàn)場(chǎng)的應(yīng)用前景也十分廣闊。根據(jù)不同的工作任務(wù),相控陣?yán)走_(dá)具有不同的工作模式。各種工作模式在時(shí)域和空域上具有不同的天線掃描方式,對(duì)偵測(cè)目標(biāo)而言,其威脅等級(jí)也不同。為了在提高在戰(zhàn)場(chǎng)上的生存能力以及電磁態(tài)勢(shì)感知的能力,對(duì)相控陣?yán)走_(dá)的工作模式識(shí)別已成為電子偵察領(lǐng)域的亟待解決的熱點(diǎn)問(wèn)題。
相控陣?yán)走_(dá)的工作模式識(shí)別是指通過(guò)無(wú)源偵察的手段獲取雷達(dá)信號(hào)的特性,生成輻射源報(bào)告,再根據(jù)報(bào)告的信息去分辨相控陣?yán)走_(dá)的工作樣式。無(wú)論是頻域或時(shí)域中,相控陣?yán)走_(dá)的每一種工作模式下,天線波束的掃描方式不盡相同。對(duì)于電子偵察方而言,這種變化直接導(dǎo)致其偵收雷達(dá)信號(hào)幅度產(chǎn)生特定的變化。
雷達(dá)工作模式識(shí)別的前提是要熟悉其基本工作原理、特點(diǎn)、性能要求,并對(duì)其進(jìn)行建模仿真。目前,雷達(dá)工作模式的建模仿真大都是站在雷達(dá)系統(tǒng)本身的角度進(jìn)行的,目的是為了給雷達(dá)系統(tǒng)的設(shè)計(jì)提供參考,模型的設(shè)計(jì)準(zhǔn)則更多的是考慮目標(biāo)特性和應(yīng)用場(chǎng)景的變化,并沒(méi)有站在電子偵察方的角度去考慮。本文通過(guò)對(duì)相控陣?yán)走_(dá)主要工作模式及天線陣面掃描方式的分析,從電子偵察的視角搭建了一套機(jī)載運(yùn)動(dòng)場(chǎng)景下的偵收幅度信息模型,為后續(xù)的工作模式識(shí)別奠定了基礎(chǔ)。
2 相控陣?yán)走_(dá)主要工作模式及掃描方式
一般來(lái)說(shuō),相控陣具有搜索和跟蹤兩種基本的工作模式。搜索模式用來(lái)監(jiān)視雷達(dá)掃描空域中可能存在的新目標(biāo),由于此時(shí)沒(méi)有掃描空域內(nèi)目標(biāo)的先驗(yàn)信息,需要按搜索程序規(guī)定自主搜索。在搜索過(guò)程中發(fā)現(xiàn)目標(biāo)后,經(jīng)過(guò)目標(biāo)確認(rèn)后轉(zhuǎn)入跟蹤模式。兩種方式最大的差別在于其數(shù)據(jù)率的不同。當(dāng)雷達(dá)波束搜索完規(guī)定的空域后,再次重新去搜索該空域時(shí)的時(shí)間間隔為搜索間隔時(shí)間,其倒數(shù)即為搜索數(shù)據(jù)率。而雷達(dá)處于跟蹤狀態(tài)時(shí),對(duì)同一個(gè)目標(biāo)相鄰兩次的照射時(shí)間為跟蹤間隔時(shí)間,它的倒數(shù)即為對(duì)該目標(biāo)的跟蹤數(shù)據(jù)率。對(duì)于相控陣?yán)走_(dá)而言,通常其搜索空域覆蓋較大,所以搜索時(shí)長(zhǎng)較長(zhǎng),間隔也較長(zhǎng),因此搜索數(shù)據(jù)率一般偏低;但要確保目標(biāo)航跡精度,提高目標(biāo)的截獲概率,以及跟蹤的穩(wěn)定性,必須有較高的跟蹤數(shù)據(jù)率。按照跟蹤數(shù)據(jù)率從低到高的劃分,主要的工作模式分為邊掃描邊跟蹤模式(TWS)、搜索加跟蹤模式(TAS)和單目標(biāo)跟蹤模式(STT)。
2.1 邊掃描邊跟蹤模式(TWS)
TWS 工作模式通常用于方位上為窄波束,仰角上為寬波束的相控陣?yán)走_(dá)。在搜索時(shí),天線波束依次掠過(guò)搜索空域,再不斷重復(fù)。此模式下主要完成搜索任務(wù),因此跟蹤式不要求有高的跟蹤率,也不對(duì)跟蹤進(jìn)行單獨(dú)采樣,所以跟蹤精度低,但控制相對(duì)簡(jiǎn)單。其天線掃描方式如圖1 所示。
如圖1所示,天線陣面共有55個(gè)波位,其中方位11個(gè),俯仰5個(gè)。工作時(shí),波束按照以上排布依次掃描,通常每個(gè)波位上的駐留時(shí)間一致,所以搜索間隔和跟蹤間隔一樣。意味著新目標(biāo)的檢測(cè)與老目標(biāo)的跟蹤以同樣的方式進(jìn)行,沒(méi)有專門(mén)設(shè)定跟蹤照射波位。
2.2 搜索加跟蹤模式(TAS)
TAS 模式是相控陣?yán)走_(dá)獨(dú)有的,它將跟蹤時(shí)間安插在搜索時(shí)間內(nèi),既對(duì)搜索數(shù)據(jù)率盡可能地放寬要求以節(jié)省系統(tǒng)資源,又保證跟蹤的穩(wěn)定性和跟蹤精度。當(dāng)天線波束還沒(méi)搜索完整個(gè)空域時(shí),由于跟蹤數(shù)據(jù)率比搜索數(shù)據(jù)了高得多,當(dāng)跟蹤時(shí)間到達(dá),必須中斷搜索過(guò)程,將天線波束用于跟蹤。那么,其天線掃描方式如圖2 所示。
由圖2 可知,目標(biāo)出現(xiàn)在第三個(gè)俯仰位中的第七個(gè)方位波位,陣面每搜索完七個(gè)波位后對(duì)目標(biāo)進(jìn)行一次跟蹤照射。跟蹤時(shí)間片完成后繼續(xù)之前的搜索工作,直至完成整個(gè)監(jiān)視空域的搜索任務(wù)。
2.3 單目標(biāo)跟蹤模式(STT)
單目標(biāo)跟蹤模式是在相控陣?yán)走_(dá)發(fā)現(xiàn)目標(biāo)后,根據(jù)戰(zhàn)術(shù)需要對(duì)其進(jìn)行鎖定和持續(xù)跟蹤。此時(shí),陣面波束會(huì)連續(xù)對(duì)其采取高數(shù)據(jù)率采樣,此模式幾乎占據(jù)了所有的系統(tǒng)資源,以確保對(duì)目標(biāo)跟蹤的精度和可靠性。
3 機(jī)載運(yùn)動(dòng)場(chǎng)景下電子偵察模型的構(gòu)建
相控陣?yán)走_(dá)布設(shè)于整個(gè)場(chǎng)景的坐標(biāo)原點(diǎn),其天線相控陣為均勻分布式平面陣。其方向圖 為:

λ 為波長(zhǎng),d1為行陣元間距,d2為列陣元間距,θ0和φ0分別表示俯仰和方位角度指向。
假設(shè)相控陣?yán)走_(dá)頻率12GHz,行陣元間距14mm,列陣元間距15mm,行陣元數(shù)為128,列陣元數(shù)為32,且加權(quán)系數(shù)為泰勒級(jí)數(shù),其天線方向如圖3 所示。
通常電子偵察設(shè)備都具備側(cè)向功能,設(shè)定其側(cè)向精度為0.1 度。偵察平臺(tái)在雷達(dá)波束覆蓋范圍內(nèi)的空域以一定速度勻速運(yùn)動(dòng),其偵察空域覆蓋雷達(dá)位置。根據(jù)以上場(chǎng)景以及雷達(dá)波速掃描方式分別仿真得出相控陣?yán)走_(dá)TWS、TAS 和STT 三種模式下無(wú)源偵察幅度特征圖,如圖4、圖5、圖6 所示。
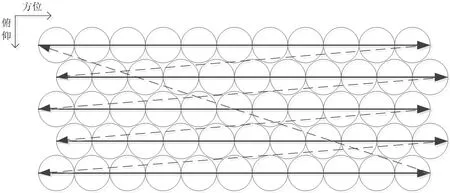
圖1:相控陣?yán)走_(dá)TWS 模式天線掃描示意圖
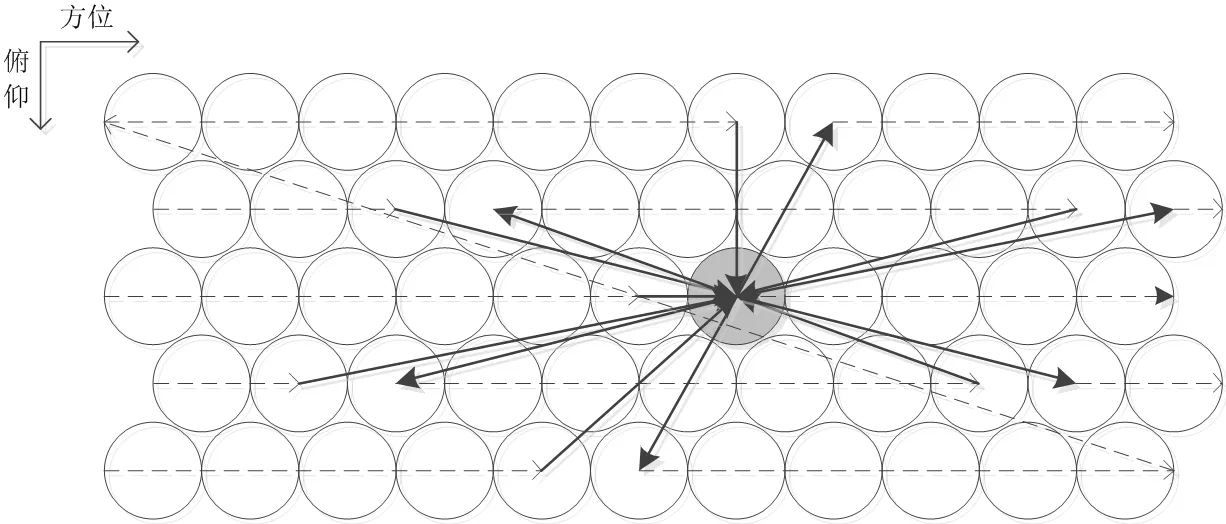
圖2:相控陣?yán)走_(dá)TAS 模式天線掃描示意圖
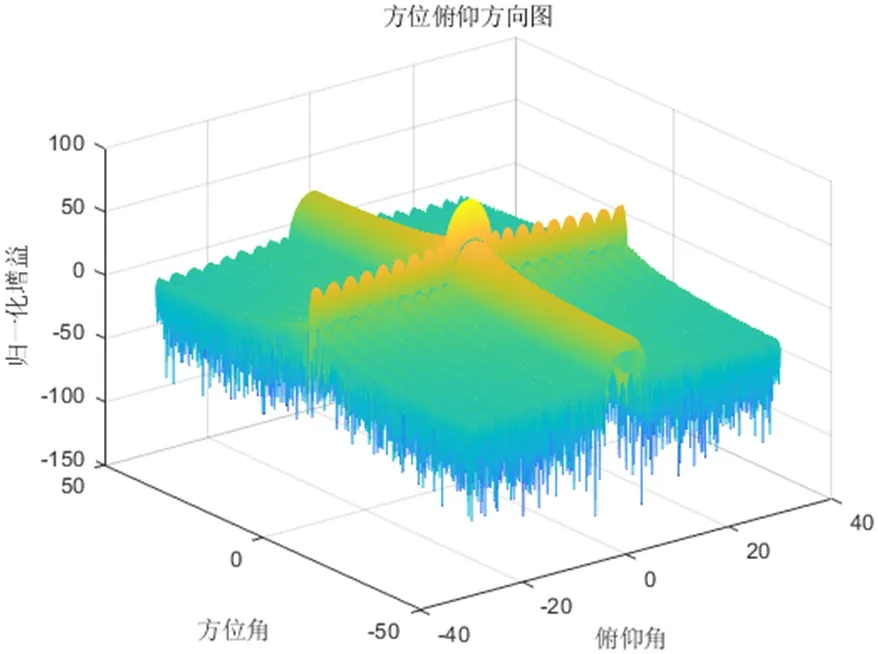
圖3:三維天線方向圖
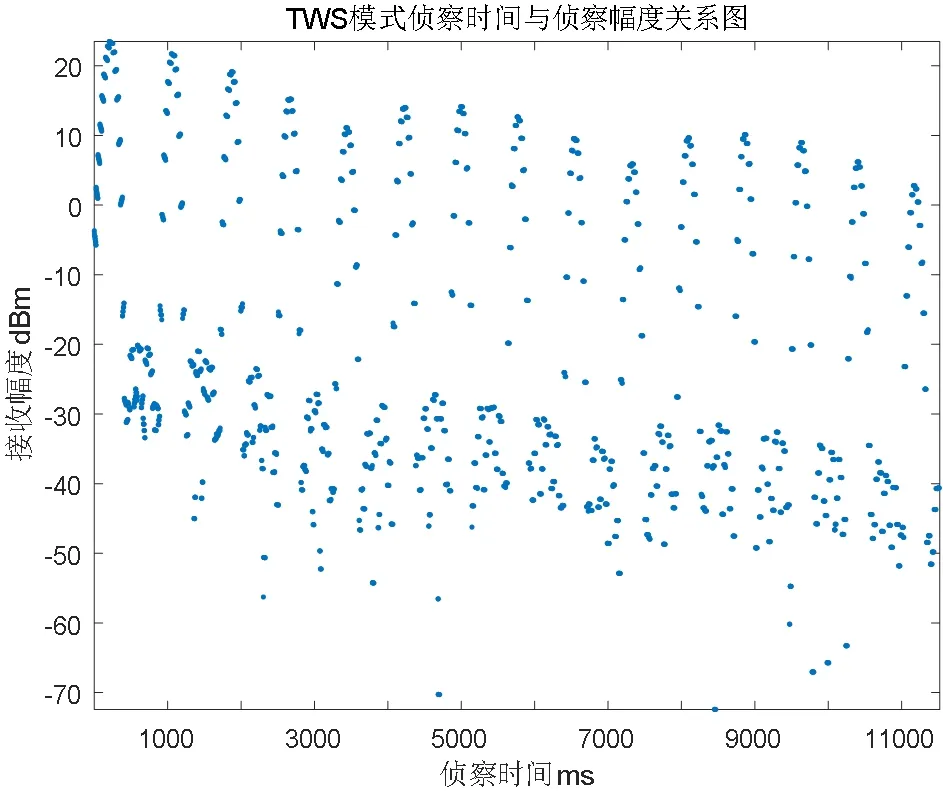
圖4
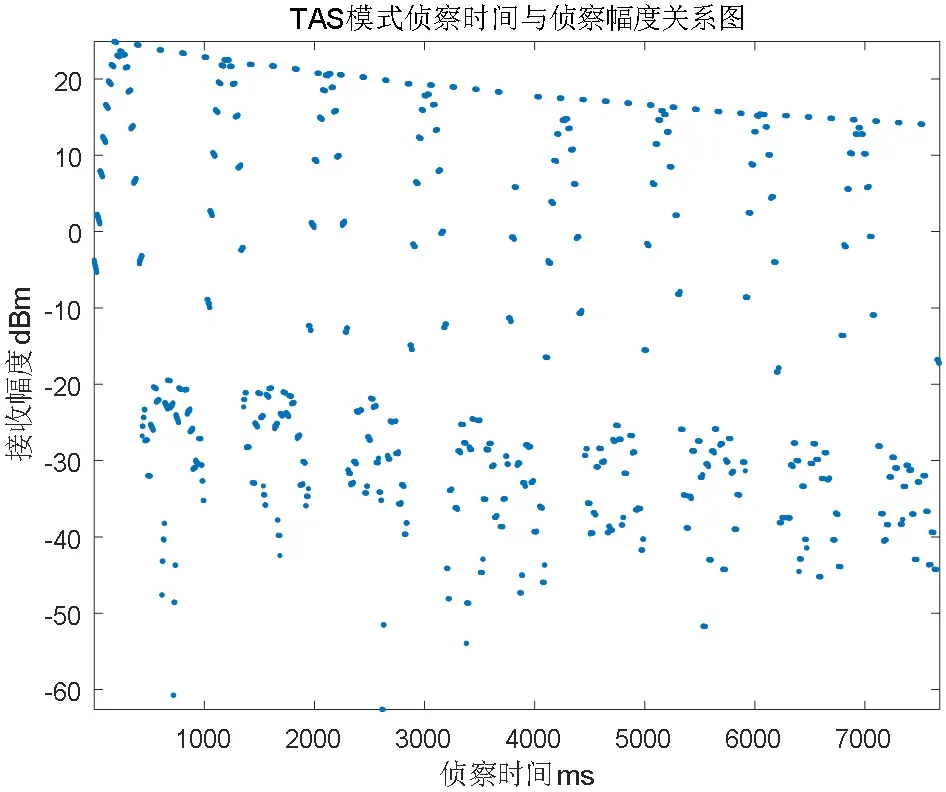
圖5
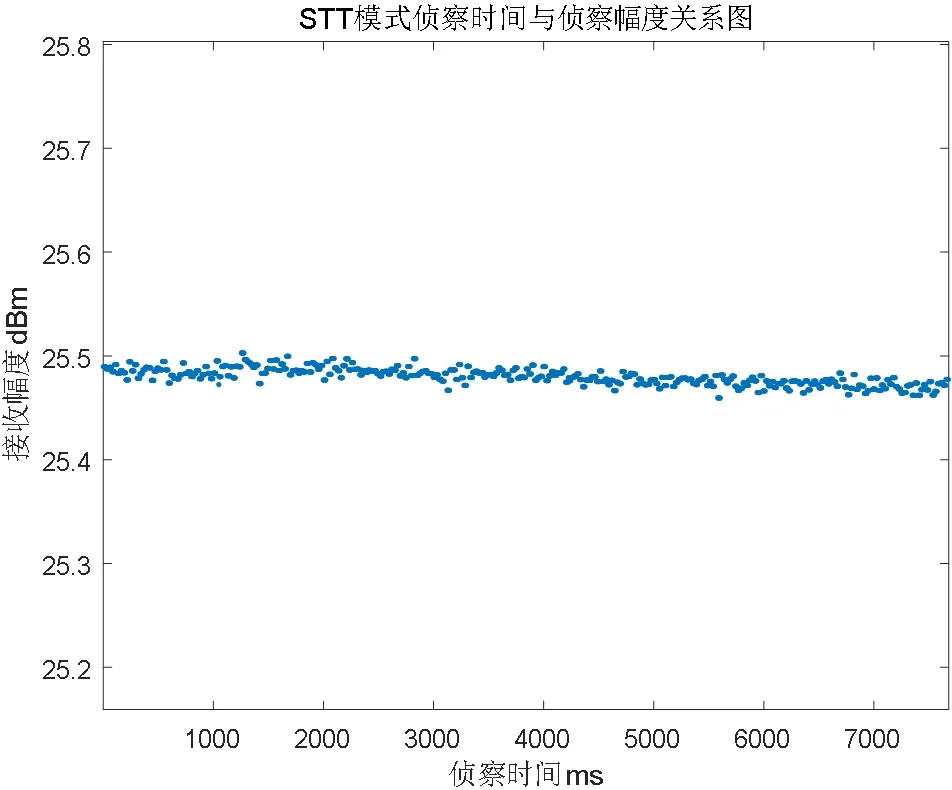
圖6
由圖可以看出,雷達(dá)在TWS 和TAS 模式下,由于方位波束寬度窄而俯仰波束寬度寬,偵察機(jī)接收幅度變化主要取決于方位波束掃描,圖中也可以明顯看到雷達(dá)在俯仰維上包含五個(gè)掃描波位。因?yàn)槟繕?biāo)在運(yùn)動(dòng),因此在下一個(gè)雷達(dá)掃描周期的偵察機(jī)接收幅度也隨著距離的變化而改變。在STT 模式中,由于雷達(dá)的波束始終鎖定在偵察機(jī)方向,所以偵察幅度變化不大。
4 結(jié)束語(yǔ)
本文介紹了相控陣?yán)走_(dá)三種典型工作模式及天線掃描方式,并模擬了一個(gè)運(yùn)動(dòng)過(guò)程中機(jī)載無(wú)源偵察機(jī)對(duì)雷達(dá)信號(hào)幅度進(jìn)行截獲的場(chǎng)景。仿真得出三種模式下無(wú)源偵察的幅度數(shù)據(jù),可以為進(jìn)一步的相控陣?yán)走_(dá)工作模式識(shí)別起到一定的支撐作用。實(shí)際上相控陣?yán)走_(dá)系統(tǒng)非常復(fù)雜,所以它的工作樣式也十分靈活,加之電磁波在空間傳輸過(guò)程的各種因素的影響,幅度信息的不確定性有待進(jìn)一步分析和研究。