三種熄焦車防碰撞技術在鞍鋼鲅魚圈的應用
2021-04-20 03:37:34趙華馬銀華于慶泉魏世明何亦光李志
鞍鋼技術 2021年2期
趙華 ,馬銀華 ,于慶泉 ,魏世明 ,何亦光 ,李志
(1.鞍鋼集團鋼鐵研究院,遼寧 鞍山 114009;2.鞍鋼股份有限公司鲅魚圈鋼鐵分公司,遼寧 營口 115007)
焦爐四大車(裝煤車、推焦車、攔焦車和熄焦車)是維持焦爐連續生產的關鍵設備,其中熄焦車是將焦爐炭化室1 000℃左右的紅焦承載并運輸到干熄焦爐內或熄焦塔進行降溫冷卻處理的重要設備,也是四大車中運行最頻繁、運行路程最長的機車,具有重負載運行、慣性大、手動操控、操作時間緊湊的運行特點。中國焦炭生產中焦車運行大多采用人工操作,不同熄焦車在同一條軌道線運行時,若操作視線不好、司機注意力不集中,或出現操作不當、剎車系統不靈等情況,極易發生撞車事故,造成設備撞擊損壞、脫軌、紅焦落地、焦爐停產、人身傷害等嚴重后果。為了防止熄焦車撞車事故的發生,鞍鋼股份有限公司鲅魚圈鋼鐵分公司(以下簡稱“鲅魚圈”)煉焦部先后自主研發了基于限位開關的防碰撞走行聯鎖控制技術、基于碼牌識別定位的焦爐機車防碰撞技術,并引進了一種基于超聲波測距的焦爐車輛防碰撞技術,通過技術改造不斷提升設備保障能力,有效防止了熄焦車撞車事故的發生。
1 熄焦車防碰撞技術
1.1 基于限位開關的焦爐機車防碰撞技術
鲅魚圈煉焦部工藝設備總體布局緊湊,4座7 m焦爐由南至北呈線狀排布,4輛熄焦車共用同一條熄焦線,2套處理能力均為160 t/h的干熄焦爐位于熄焦線中間。由于兩輛熄焦車同時進行干熄焦作業時距離太近,經常會發生熄焦車碰撞事故。為了解決此問題,鲅魚圈煉焦部于2008年自主研發了基于限位開關的防碰撞走行聯鎖控制技術。
1.1.1 工藝原理
限位開關利用運動單元觸發限位開關的接通和分斷,使運動單元部件能夠實現自動停止,改變運動方向或者運動模式等功能。基于限位開關的焦爐機車防碰撞技術控制示意圖見圖1。對熄焦車走行控制系統進行程序優化,新增熄焦車走行減速控制和制動控制線路,以限位開關為控制接點,分別安裝在預先設定好的減速點、制動點位置。當熄焦車經過減速點時,會自動采取減速操作,由高速慢下來;再經過制動點時,會自動進行制動操作。由于兩熄焦車之間最終制動點相距太近,在熄焦車上限位軸上安裝大號彈簧,在熄焦線上安裝固定“鐵鞋”,以達到緩沖和制動作用,從而使兩車停下來時不碰撞。
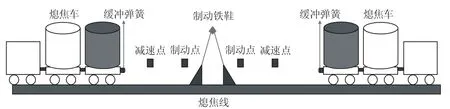
圖1 基于限位開關的焦爐機車防碰撞技術控制示意圖Fig.1 Schematic Diagram for Anti-collision Control Technology for Coke Oven Locomotives Based on Limit Switch
1.1.2 技術特點
(1)工藝控制原理簡單,設備材料簡單,改造成本低廉,易自主開發。
(2)在工程應用中,限位開關經常出現失效現象,運行可靠性相對較差,但維修更換方便,運行成本低。
(3)有較大局限性,適用范圍較小。
1.2 基于碼牌識別定位的焦爐機車防碰撞技術
焦炭生產工藝要求焦爐機械設備中的機車協同作業,完成裝煤、平煤、推焦、攔焦、除塵等一系列操作。機車協同的關鍵問題是焦爐機車的自動控制,即如何按照煉焦生產計劃和煉焦生產工藝要求,在中控室工業計算機的集中控制管理下,控制焦爐機車自動行走并精確定位于指定的目標地址,繼而協同完成煉焦生產作業。鲅魚圈煉焦部機車定位原采用編碼電纜定位技術,存在更換維修成本高、難度大等不足,于2012年引進了碼牌識別定位系統,提高焦爐機車定位的準確性和精度。在此技術基礎上自主研發了基于碼牌識別定位的焦爐機車防碰撞技術。
1.2.1 工藝原理
基于碼牌識別定位和編碼器測距的焦爐機車防碰撞技術工作原理:基于碼牌識別定位系統建立焦爐各熄焦車的實時位置,利用焦爐機車無線通信網絡將各車的實時位置傳送給中控PLC,同時將熄焦車運行區域劃分為4檔速度區、3檔速度區、1~2檔速度區三個區域。根據生產經驗及現場標定,熄焦車在4檔速度區以任意速度行駛均可滿足安全停車的要求;在3檔速度區而速度為4檔時便有可能沖出軌道邊界;在1~2檔速度區而速度高于2檔時幾乎肯定會沖出軌道邊界。因此,為確保熄焦車安全運行,規定3檔速度區限制4檔速度,熄焦車只可以3檔及以下速度行駛,1~2檔速度區限制3~4檔速度,熄焦車只可以2檔及以下速度行駛。基于碼牌識別定位的焦爐機車防碰撞技術控制示意圖見圖2。
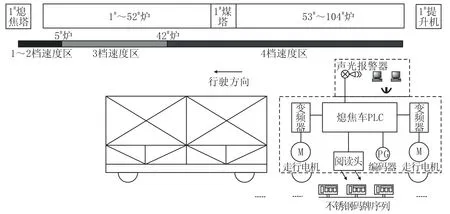
圖2 基于碼牌識別定位的焦爐機車防碰撞技術控制示意圖Fig.2 Schematic Diagram for Anti-collision Control Technology for Coke Oven Locomotives Based on Positioning by Code Card Identification
1.2.2 技術特點
(1)此項技術屬于在碼牌識別定位系統基礎上的再次開發利用,幾乎無成本,但機車位置判定計算設定較復雜,各種狀況下的位置判定需要嚴密的邏輯測算設計,可以自主開發但有一定的難度。
(2)運行非常可靠,無需維修,無運行成本。
(3)有一定的局限性,在兩干熄焦系統之間未設置碼牌區域無法運行,但可以通過新增碼牌方式進行完善。
(4)定位精度取決于碼牌之間間隔,鲅魚圈煉焦部現設定為1.4 m。
(5)此項技術還可以判斷兩車之間距離,有較大技術升級空間。
(6)可與其他系統聯合起來建立焦爐車輛管理系統,提高焦爐車輛控制自動化和智能化水平,為焦爐機車無人駕駛技術奠定基礎。
1.3 基于超聲波測距的焦爐車輛防碰撞技術
隨著滿足高爐生產需求和促進焦化綠色生產的需要,鲅魚圈煉焦部焦爐生產節奏進一步強化,且新建3干熄焦爐已列上日程,熄焦車操作時間日益緊張,同時車輛分配調度管理更為復雜,因此引進了基于超聲波測距的焦爐車輛防碰撞技術。
1.3.1 工藝原理
超聲波測距是一種非接觸式的檢測方式。與其它傳統的光學檢測或者電磁學檢測方法相比較,超聲波測距不受光線、被測對象顏色等因素的干擾,尤其適用于被測物在煙霧、大量粉塵、電磁干擾或致毒等極端惡劣環境下的測量。基于超聲波測距的焦爐車輛防碰撞技術工作原理:利用超聲波抗干擾能力強,在雨雪、粉塵、蒸汽以及車輛晃動等惡劣工況下,仍具有良好的目標捕捉能力的技術特點,通過與焦爐車輛的車載控制系統連鎖,實現防撞對象間距的實時監控,以及緊急情況下的自動減速和停車。該焦爐車輛防碰撞系統主要由信號采集器、信號分析處理器、報警裝置、以及PLC控制系統等部分組成。基于超聲波測距的焦爐車輛防碰撞技術工藝控制示意圖見圖3。

圖3 基于超聲波測距的焦爐車輛防碰撞技術工藝控制示意圖Fig.3 Schematic Diagram for Anti-collision Control Technology for Coke Oven Vehicles Based on Ultrasonic Ranging
1.3.2 技術特點
(1)由于超聲波是依靠機械振動產生的,因而對粉塵、電磁場、蒸汽等惡劣工況抵抗力強。
(2)采用自有技術設計的喇叭口型探頭,具有良好的目標捕捉能力,對車輛晃動,軌道面局部高低不平等環境因素適應能力強。
(3)利用自身技術開發的數據分析和處理系統,功能強大,糾錯能力強,可有效屏蔽噪音、障礙物等干擾因素。
(4)成本不高,運行費用少,除罐車更換作業外的其它作業均容易維護。
(5)可與焦爐車輛對位系統組合,實現“雙保險”。
2 熄焦車防碰撞技術對比分析
結合鲅魚圈煉焦部三種熄焦車防碰撞技術的應用情況,從技術改造、運行控制以及升級空間等9個方面進行了技術對比,詳見表1。由表1可以看出,三種熄焦車防碰撞技術改造成本都較低,相關基礎技術均較成熟,運行成本低,相互可以兼容,均能在不同程度上實現熄焦車防碰撞目的,其中基于限位開關的防碰撞走行聯鎖控制技術適用范圍較窄,基于超聲波測距的焦爐車輛防碰撞技術適用面最寬、精確度最高,基于碼牌識別定位的焦爐機車防碰撞技術開發較難,但開發前景較大。
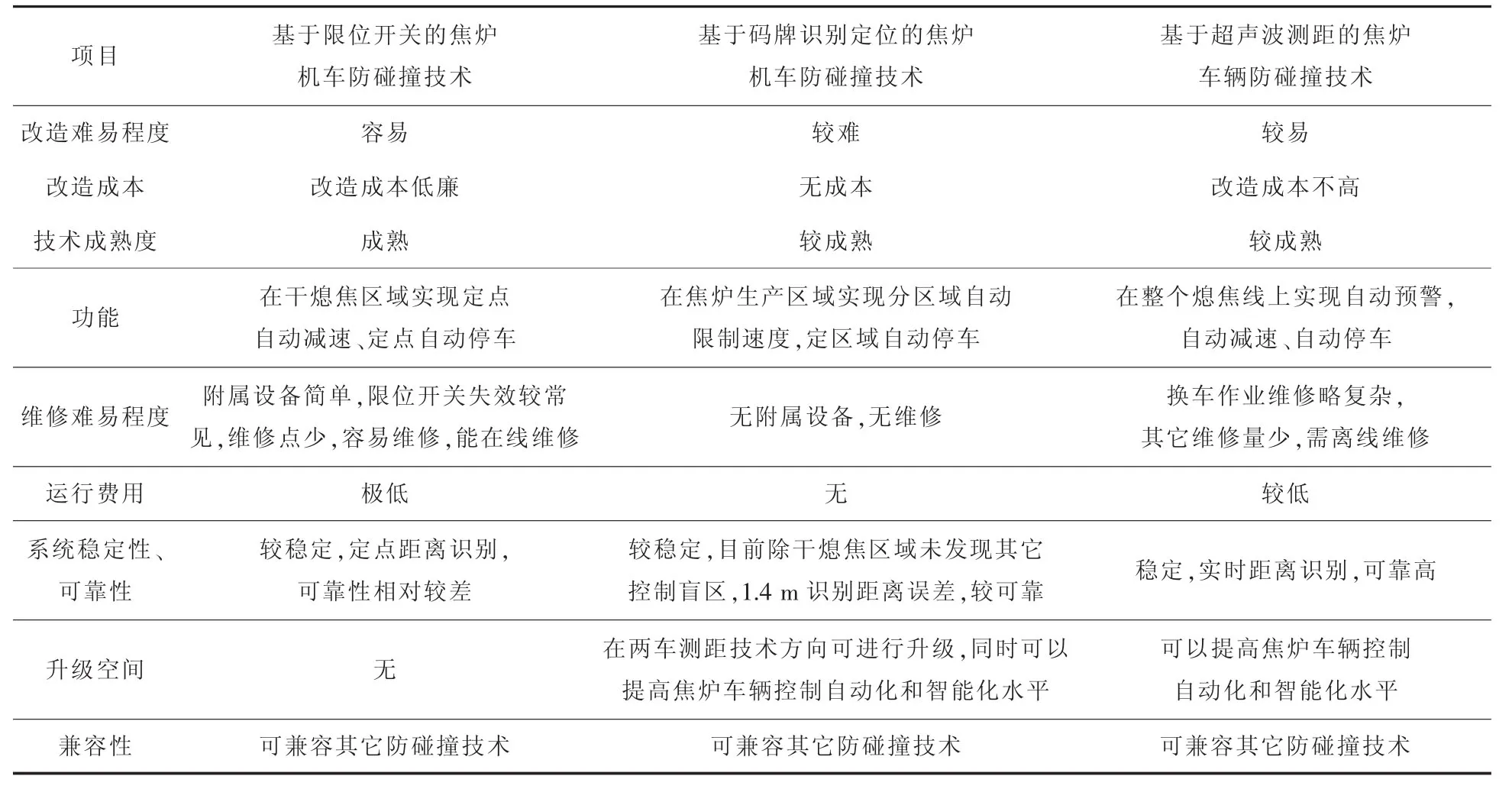
表1 三種熄焦車防碰撞技術對比Table 1 Comparison of Three Anti-collision Technologies for Coke Quenching Cars
3 應用效果
(1)自2008年基于限位開關的焦爐機車防碰撞技術應用以來,在干熄焦提升機井架下未再發生熄焦車相撞事故,實現了干熄爐穩定生產,節省了操作時間,降低了設備維修費用,延長了設備使用壽命。
(2)自2012年基于碼牌識別定位的焦爐機車防碰撞技術投入運用以來,熄焦車相撞事故有效減少,同時也防止了熄焦車撞擊焦爐兩側止擋器造成“過線脫軌”事故的發生,確保了煉焦生產的安全高效運行。
(3)自2019年3月引進的基于超聲波測距的焦爐車輛防碰撞技術投入運營以來,沒有再發生熄焦車相撞事故,有效保證了焦爐生產的穩定順行。
4 結語
鞍鋼股份鲅魚圈鋼鐵分公司為了防止熄焦車碰撞事故的發生,先后自主研發了基于限位開關的防碰撞走行聯鎖控制技術、基于碼牌識別定位的焦爐機車防碰撞技術,并引進了一種基于超聲波測距的焦爐車輛防碰撞技術。通過對三項技術進行對比分析得出,三種熄焦車防碰撞技術改造成本都較低,相關基礎技術均較成熟,運行成本低,相互可以兼容,均在不同程度上實現熄焦車防碰撞目的,其中基于限位開關的焦爐機車防碰撞技術適用范圍較窄,基于超聲波測距的焦爐車輛防碰撞技術適用面最寬,精確度最高,基于碼牌識別定位的焦爐機車防碰撞技術開發較難但開發前景較大。三項技術應用后均有效減少了熄焦車運行中碰撞事故的發生。